Numerical schemes for low Mach wave breaking
29
0
0
Texte intégral
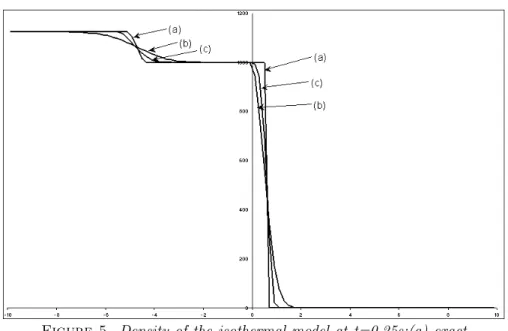
Figure
+7

Documents relatifs