ـــــﻳرﻮـــــﻬــــﻤـــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــﺠﻟا
ﺔــــــــــــــ
ــﻴــﻃاﺮـــﻘـــــــــــــــــــــــــــــﻤﻳﺪﻟا ﺔـــــﻳﺮـــﺋاﺰـــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــﺠﻟا
ﺔـــ
ﺔـــــﻴـــﺒـــﻌـــــــــــــــــــــــــــــــــــــــــﺸـــﻟا
REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE
ــــــﺘﻟا ةرازو
ـــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــ
ـﻌﻟا ﺚﺤــــــــــــــــــــــــــــــــــــــــــــﺒﻟا و ﻲﻟﺎــــــــــــــــــــــــــــــﻌﻟا ﻢـــــــــﻴﻠــــــﻌــــــــــــ
ــــــ
ﻲــــــــــــﻤــــــﻠـــــــــــــ
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
ﺪــﻳﺎـــــــﻘــــﻠــــﺑ ﺮــــــــــــﻜــﺑ ﻲﺑأ ﺔﻌﻣﺎـــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــــﺟ
–
ـــــــــــــــــﺴﻤﻠـــــــﺗ
نﺎــــــــــــــــــــــــــــــــــــــــــــــــ
–
Université Aboubakr Belkaïd
– Tlemcen –
Faculté de TECHNOLOGIE
THESE
Présentée pour l’obtention du grade de DOCTEUR EN SCIENCES En : Télécommunication
Spécialité : Télécommunication Par : SEDJELMACI Amina Nadjet
Architecture de réseaux sans fil maillés dédiée aux communications
véhicule‐à‐véhicule et véhicule‐à‐infrastructure
Soutenue publiquement, le 12/12/2018, devant le jury composé de :
M Chikh Mohammed Amine Professeur Univ. Tlemcen Président
Mme Lahfa Fedoua Professeur Univ. Tlemcen Directeur de thèse
M Benmammar Badr MCA Univ. Tlemcen Examinateur 1
M Khalfi Mohamed Fethi MCA Univ.Sidi Bel Abbes Examinateur 2
M Mejdi Kaddour Professeur Univ. D’Oran Examinateur 3
M Kechar Bouabdellah Professeur Univ. D’Oran Examinateur 4
R
EMERCIEMENTS
Je remercie Dieu le Tout‐Puissant pour nous avoir donné le potentiel d'apprendre les lois de notre univers afin de les exploiter pour notre bien‐être.
Ce travail a été accompli à l’aide de plusieurs personnes que je tiens à remercier absolument. Je remercie en premier lieu mon encadreur Mme. Lahfa Fedoua de m'avoir apporté ses valeureux conseils et soutiens durant la réalisation de cette thèse. Je lui transmets l’expression de ma reconnaissance et de ma plus profonde gratitude. Je remercie énormément les professeurs membres du jury de m'avoir fait l'honneur en acceptant d’examiner mes travaux de thèse de doctorat et faire partie de mon jury. Je remercie sincèrement ma chère mère et mon cher père que j’aime énormément. Je remercie aussi mon très cher mari et mes beaux‐parents. Je tiens également à remercier mes chers frères et mes belles sœurs. Finalement, je remercie tous ceux qui ont participé de près ou de loin à l'élaboration de ce travail avec un conseil ou autre parmi mes collègues enseignants à l’université de Chlef, mes amis et mes étudiants. À ma chère Houda.
R
ESUME
Ces dernières années, la dissémination des données dans les VANETs (Vehicular Ad hoc NETworks) a attiré beaucoup d'attention étant donné son rôle imminent dans l'amélioration de la sécurité routière et la réduction de la congestion du trafic. Ces points problématiques pèsent lourdement sur l'économie d'un pays en termes d'énergie, de coût et de temps. Pour être en mesure de réduire les risques d'accidents, d'éviter les situations dangereuses et de pouvoir atténuer ces problèmes, nous devons réussir à diffuser efficacement les informations pertinentes avec un minimum d'utilisation de la bande passante.
La manière dont les informations pertinentes sont disséminées au sein du réseau véhiculaire est considérée comme un aspect important pour la coopération des véhicules dans les VANETs. Cependant, plusieurs problèmes peuvent survenir au cours de ce processus de diffusion : (1) une consommation excessive de la bande passante dans le cas où nous sommes confrontés à une zone urbaine. (2) Un problème de discontinuité du réseau peut survenir dans le cas d'une zone rurale. Ces problèmes constituent un défi crucial et la question qui se posera sera «Que pouvons‐nous faire pour surmonter la dispersion rurale sans utilisation excessive de la bande passante et comment pouvons‐nous éviter le broadcast storm tout en gardant un taux de couverture élevé ? ».
Dans cette thèse, nous tentons de résoudre ces problèmes en explorant la performance de certains protocoles existants bien connus (DHVN et DDT) dans les environnements urbains et ruraux en utilisant l'implémentation du plan Manhattan dans le simulateur VANET VNS. Sur la base des résultats de cette exploration, nous proposons et testons un nouveau protocole DHVN opportuniste amélioré que nous appelons oDHVN. Afin de garantir la valeur ajoutée de notre protocole oDHVN, nous proposons une version modifiée du modèle Manhattan en proposant et en utilisant un plan Manhattan mixte qui traduit plus précisément la disposition d'un environnement véhiculaire réel tout en conservant une faible complexité d'implémentation et d'utilisation. Mots clés : VANET, Protocoles de Dissémination, Flooding, NS3, Modèle de Mobilité, DHVN, SNF, Protocoles Opportunistes, oDHVN , DDT, Modèle de Mobilité Manhattan.
ﺹﺧﻠﻣ
ﻲﻓ ﺕﺎﻧﺎﻳﺑﻟﺍ ﺭﺷﻧ ﺏﺫﺗﺟﺍ ،ﺓﺭﻳﺧﻷﺍ ﺕﺍﻭﻧﺳﻟﺍ ﻲﻓ VANETs ﺳﻠﻟ ﺔﺻﺻﺧﻣﻟﺍ ﺕﺎﻛﺑﺷﻟﺍ) ﻩﺭﻭﺩﻟ ﺍﺭﻅﻧ ﻡﺎﻣﺗﻫﻻﺍ ﻥﻣ ﺭﻳﺛﻛﻟﺍ (ﺕﺍﺭﺎﻳ ﺙﻳﺣ ﻥﻣ ﺩﻠﺑﻟﺍ ﺩﺎﺻﺗﻗﺍ ﻰﻠﻋ ﺭﻳﺑﻛ ﻝﻛﺷﺑ ﺭﺛﺅﺗ ﺔﺳﺎﺳﺣﻟﺍ ﻁﻘﻧﻟﺍ ﻩﺫﻫ .ﻱﺭﻭﺭﻣﻟﺍ ﻡﺎﺣﺩﺯﻻﺍ ﻥﻣ ﺩﺣﻟﺍﻭ ﻕﺭﻁﻟﺍ ﻰﻠﻋ ﺔﻣﻼﺳﻟﺍ ﻥﻳﺳﺣﺗ ﻲﻓ ﻝﺎﻌﻔﻟﺍ ﻝﻛﺎﺷﻣﻟﺍ ﻩﺫﻫ ﻝﺛﻣ ﻥﻣ ﻑﻳﻔﺧﺗﻟﺍﻭ ﺓﺭﻳﻁﺧﻟﺍ ﻑﻗﺍﻭﻣﻟﺍ ﺏﻧﺟﺗﻭ ،ﺙﺩﺍﻭﺣﻟﺍ ﺭﻁﺎﺧﻣ ﻥﻣ ﺩﺣﻟﺍ ﻥﻣ ﻥﻛﻣﺗﻧ ﻲﻛﻟﻭ .ﺕﻗﻭﻟﺍﻭ ﺔﻗﺎﻁﻟﺍ ﺢﺟﻧﻧ ﻥﺃ ﺎﻧﻳﻠﻋ ، .ﺭﻓﻭﺗﻣﻟﺍ ﻱﺩﺩﺭﺗﻟﺍ ﻕﺎﻁﻧﻟﺍ ﻝﺎﺟﻣ ﻥﻣ ﻰﻧﺩﻷﺍ ﺩﺣﻟﺍ ﻡﺍﺩﺧﺗﺳﺎﺑ ﻥﻛﻣﻣ ﺩﺣ ﻰﺻﻗﺃ ﻰﻟﺇ ﺎﻫﺭﺷﻧﻭ ﺔﻳﻣﻫﻷﺍ ﺕﺍﺫ ﺕﺎﻣﻭﻠﻌﻣﻟﺍ ﺭﺷﻧ ﻲﻓ ﻥﻭﺎﻌﺗﻠﻟ ﺔﻳﻣﻫﺃ ﺭﺛﻛﻷﺍ ﺏﻧﺍﻭﺟﻟﺍ ﺩﺣﺃ ﺕﺎﺑﻛﺭﻣﻟﺍ ﻁﻳﺣﻣ ءﺎﺣﻧﺃ ﻊﻳﻣﺟ ﻲﻓ ﺔﻠﺻﻟﺍ ﺕﺍﺫ ﺕﺎﻣﻭﻠﻌﻣﻟﺍ ﺙﺑ ﺎﻬﺑ ﻡﺗﻳ ﻲﺗﻟﺍ ﺔﻘﻳﺭﻁﻟﺍ ﺭﺑﺗﻌﺗﻭ ﻛﺑﺷ ﻲﻓ ﺕﺎﺑﻛﺭﻣﻟﺍ ﻥﻳﺑ ﺎﻣ ) :ﻩﺫﻫ ﺭﺷﻧﻟﺍ ﺔﻳﻠﻣﻋ ءﺎﻧﺛﺃ ﺕﻼﻛﺷﻣ ﺓﺩﻋ ﺙﺩﺣﺗ ﻥﺃ ﻥﻛﻣﻳ ،ﻙﻟﺫ ﻊﻣﻭ .ﺔﻳﺭﺑﻟﺍ ﺔﺣﻼﻣﻟﺍ ﺔ 1 ﻁﺭﻔﻣﻟﺍ ﻙﻼﻬﺗﺳﻻﺍ ( ) .ﺔﻳﺭﺿﺣ ﺔﻘﻁﻧﻣ ﻲﻓ ﺩﺟﺍﻭﺗﻧ ﺎﻧﻛ ﺍﺫﺇ ﺎﻣ ﺔﻟﺎﺣ ﻲﻓ ﻲﻋﺍﺫﻹﺍ ﺩﺩﺭﺗﻟﺍ ﻕﺎﻁﻧﻟ 2 ﻲﻓ ﺔﻛﺑﺷﻟﺍ ﻲﻓ ﻝﺎﺻﺗﺍ ﻡﺩﻋﻭ ﻉﺎﻁﻘﻧﺍ ﺔﻠﻛﺷﻣ ﺙﺩﺣﺗ ﻥﺃ ﻥﻛﻣﻳ ( ﺎﺷﻣﻟﺍ ﻩﺫﻫ ﻝﻛﺷﺗﻭ .ﺔﻳﻔﻳﺭ ﺔﻘﻁﻧﻣ ﻲﻓ ﺎﻧﺩﺟﺍﻭﺗ ﺔﻟﺎﺣ ﻭﻳﺳ ﻱﺫﻟﺍ ﻝﺍﺅﺳﻟﺍﻭ ،ﺎًﻣﺳﺎﺣ ﺎًﻳﺩﺣﺗ ﻝﻛ ﺍ ﺻﻔﻧﻻﺍ ﻰﻠﻋ ﺏﻠﻐﺗﻠﻟ ﻪﻠﻌﻓ ﺎﻧﻧﻛﻣﻳ ﻱﺫﻟﺍ ﺎﻣ" ﻭﻫ ﺎﻧﻬﺟ ﻝﺎ ﻰﻠﻋ ﺕﻗﻭﻟﺍ ﺱﻔﻧ ﻲﻓ ﻅﺎﻔﺣﻟﺍ ﻊﻣ ﻝﻣﺎﺷﻟﺍ ﺙﺑﻟﺍ ﻑﺻﺍﻭﻋ ﺏﻧﺟﺗ ﺎﻧﻧﻛﻣﻳ ﻑﻳﻛﻭ ،ﻱﺩﺩﺭﺗﻟﺍ ﻕﺎﻁﻧﻠﻟ ﻁﺭﻔﻣﻟﺍ ﻡﺍﺩﺧﺗﺳﻻﺍ ﻥﻭﺩ ﻑﻳﺭﻟﺍ ﻲﻓ ﻲﻛﺑﺷﻟﺍ "؟ﺔﻳﻟﺎﻋ ﺔﻳﻁﻐﺗ ﺔﺑﺳﻧ ﺔﺟﻟﺎﻌﻣ ﻝﻭﺎﺣﻧ ،ﻩﺫﻫ ﻩﺍﺭﻭﺗﻛﺩﻠﻟ ﺎﻧﺗﻟﺎﺳﺭ ﻲﻓ ﺔﻓﻭﺭﻌﻣﻟﺍ ﺔﻣﺋﺎﻘﻟﺍ ﺕﻻﻭﻛﻭﺗﻭﺭﺑﻟﺍ ﺽﻌﺑ ءﺍﺩﺃ ﻑﺎﺷﻛﺗﺳﺍ ﻝﻼﺧ ﻥﻣ ﺎﻳﺎﺿﻘﻟﺍ ﻪﺗﺎﻫ ﻝﺛﻣ ) DHVN ﻭ DDT ﺔﻳﺭﺿﺣﻟﺍ ﻖﻁﺎﻧﻣﻟﺍ ﻥﻣ ﻝﻛ ﻲﻓ ( ﻭ ﺕﺎﻛﺑﺷ ﺓﺎﻛﺎﺣﻣ ﺞﻣﺎﻧﺭﺑ ﻲﻓ ﻥﺗﺎﻬﻧﺎﻣ ﺔﻁﻳﺭﺧ ﺫﻳﻔﻧﺗ ﻡﺍﺩﺧﺗﺳﺎﺑ ﺔﻳﻔﻳﺭﻟﺍ VANET ﻡﺳﺎﺑ ﻑﻭﺭﻌﻣﻟﺍ VNS ﻝﻭﻛﻭﺗﻭﺭﺑ ﺭﺑﺗﺧﻧﻭ ﺡﺭﺗﻘﻧ ،ﻑﺎﺷﻛﺗﺳﻻﺍ ﺍﺫﻫ ﺞﺋﺎﺗﻧ ﻰﻠﻋ ءﺎﻧﺑ . DHVN ﻪﻳﻣﺳﻧ ﻱﺫﻟﺍ ﺩﻳﺩﺟﻟﺍ ﻥﺳﺣﻣﻟﺍ ﻱﺯﺎﻬﺗﻧﻻﺍ oDHVN ﺎﻧﻟﻭﻛﻭﺗﻭﺭﺑﻟ ﺔﻓﺎﺿﻣﻟﺍ ﺔﻣﻳﻘﻟﺍ ﻥﺎﻣﺿ ﻝﺟﺃ ﻥﻣ . oDHVN ﻥﺗﺎﻬﻧﺎﻣ ﺔﻁﻳﺭﺧ ﻡﺍﺩﺧﺗﺳﺎﺑ ﻥﺗﺎﻬﻧﺎﻣ ﺝﺫﻭﻣﻧ ﻥﻣ ﺔﻟﺩﻌﻣ ﺔﺧﺳﻧ ﺡﺭﺗﻘﻧ ، ﻘﻌﺗ ﻭﺃ ﺔﺑﻭﻌﺻ ﻥﻭﺩﺑ ﻖﻳﺑﻁﺗﻭ ﻝﺎﻣﻌﺗﺳﺍ ﺔﻘﻳﺭﻁ ﻰﻠﻋ ﻅﺎﻔﺣﻟﺍ ﻊﻣ ﺔﻳﻘﻳﻘﺣﻟﺍ ﺕﺎﺑﻛﺭﻣﻟﺍ ﺔﺋﻳﺑ ﺔﻗﺩ ﺭﺛﻛﺃ ﻝﻛﺷﺑ ﻡﺟﺭﺗﺗ ﻲﺗﻟﺍ ﺔﻁﻠﺗﺧﻣﻟﺍ ﻳ .ﺩ ﺔﻳﺣﺎﺗﻔﻣ ﺕﺎﻣﻠﻛ ﻲﻛﺎﺣﺗﻟﺍ ﺞﻣﺎﻧﺭﺑ ,ﺔﻳﻛﻠﺳﻻﺍ ﺕﺍﺭﺎﻳﺳﻟﺍ ﺕﺎﻛﺑﺷ , VNS ,ﺕﺎﻣﻭﻠﻌﻣﻟﺍ ﺭﺷﻧ ﺕﻻﻭﻛﻭﺗﻭﺭﺑ , DHVN, DDT, oDHVN , . ,ﺕﺎﺑﻛﺭﻣﻟﺍ ﻙﺭﺣﺗﻟ ﻥﺗﺎﻬﻧﺎﻣ ﺝﺫﻭﻣﻧ ﻝﻣﺎﺷﻟﺍ ﺙﺑﻟﺍ ﻑﺻﺍﻭﻋ.
A
BSTRACT
In recent years, the dissemination of data in VANETs (Vehicular Ad hoc NETworks) has attracted a lot of attention given its imminent role in improving road safety and reducing traffic congestion. The issues weigh heavily on the economy of a country in terms of energy and time. To be able to reduce the risk of accidents, avoid dangerous situations and mitigate such problems, we have to succeed in effectively disseminating relevant information and spreading it as far as possible with a minimum bandwidth usage.
The way in which relevant information is broadcasted throughout the vehicle environment is considered as a most important aspect for the vehicles cooperation in VANETs. However, several problems can occur during this process of dissemination: (1) an excessive consumption of bandwidth in the case where we are confronted to an urban area. (2) A disconnected network problem can occur in the case of a rural area. These problems constitute a crucial challenge and the question that will arise to face them is “What can we do to overcome the rural disconnection without excessive use of bandwidth and how can we avoid broadcast storms while keeping a high coverage ratio ?”.
In this thesis, we attempt to address these issues by exploring the performance of some well‐known existing protocols (DHVN and DDT) in both urban in rural environments using the implementation of the Manhattan map in the VANET simulator VNS . Building on the results of this exploration, we propose and test a new improved opportunistic DHVN protocol that we call oDHVN. In order to further ensure the added value of our protocol oDHVN, we propose a modified version of the Manhattan model by using a mixed Manhattan map that translates more accurately the disposition of a real‐life vehicular environment while keeping a low implementation and utilization complexity.
Keywords : VANET, Dissemination Protocols, Flooding, NS3, Mobility Model, DHVN, SNF, Opportunistic Protocols, oDHVN , DDT, Manhattan Mobility Model.
T
ABLE DES MATIERES
Remerciements ... 2 Résumé ... 3
ﺺﺨﻠﻣ
... 4 Abstract ... 5 Table des matières ... 6 Liste des Figures ... 9 Liste des tableaux ... 11 Acronymes ... 12 I Introduction générale... 14 Présentation de la problématique ... 14 Méthodologies et Contributions ... 16 Structure du Manuscrit ... 17 Partie I : Concepts et Méthodes ... 19 II Généralités sur les VANETs ... 20 Introduction ... 20 Architecture des réseaux VANETs ... 20 Propriétés des réseaux VANETs ... 23 Applications des réseaux VANET ... 24 II.4.1 Les applications de sécurité ... 24 II.4.2 Les applications pour l’efficacité du trafic ... 26 II.4.3 Les applications d'info‐divertissements ... 26 Technologies de communication, Normes et Standards ... 26 II.5.1 Le réseau cellulaire ... 27 II.5.2 IEEE 802.11p ... 27 II.5.3 WAVE (Wireless Access in Vehicular Environment) ... 28II.5.4 ETSI ITS (European Telecommunications Standards Institute Intelligent Transport Systems) ... 30 Conclusion ... 32 III Les Protocoles de Dissémination dans les VANETs ... 33 Introduction ... 33 Types de Fonctionnement et caractéristiques ... 33 La catégorie diffusion avec relai ... 35 La catégorie diffusion avec relai de type store and forward ... 37 La catégorie opportuniste ... 41 Protocoles à étudier et à évaluer ... 42 Conclusion ... 43 IV L’outil de Simulation VNS ... 44 Introduction ... 44 Principales caractéristiques ... 45 Liste des simulateurs VANETs ... 46 IV.3.1 NCTUns ... 46 IV.3.2 iTETRIS ... 47 IV.3.3 Veins ... 48 IV.3.4 GrooveNet ... 49 Les Modèles de Mobilité ... 50 IV.4.1 Caractérisation des modèles de mobilité ... 51 Généralités sur la structure et l’utilisation de VNS ... 53 IV.5.1 Simulateur des réseaux de communication ... 54 IV.5.2 Simulateur de la mobilité ... 62 IV.5.3 Modifications dans NS3 ... 63 IV.5.4 Intégration entre mobilité et réseau ... 65
IV.5.5 Modifications du simulateur VNS dans le cadre de notre travail ... 67 IV.5.6 Le modèle Manhattan dans VNS ... 70 Conclusion ... 71 Partie II : Contributions et Résultats ... 72 V Simulations dans le plan Manhattan Classique ... 73 Introduction ... 73 Les Paramètres de Simulation ... 73 Résultats et Discussion ... 76 Conclusion ... 79 VI La Proposition d’un Nouveau Protocole de Dissemination Opportuniste « oDHVN » .. 80 Introduction ... 80 Notre proposition ... 80 Algorithme détaillé final... 83 Résultats et Discussion ... 86 Conclusion ... 89 VII Proposition Du Plan Manhattan Mixte ... 90 Introduction ... 90 Implémentation et paramètres ... 90 Simulations DDT, DHVN et oDHVN dans Manhattan mixte ... 92 Simulation hybride dans Manhattan mixte ... 95 Conclusion ... 96 VIII Conclusion et Perspectives ... 97 Conclusion Générale ... 97 Contributions ... 98 Perspectives ... 99 Annexe : Exemple de script python utilisé pour piloter la simulation VNS ... 105
L
ISTE DES
F
IGURES
Figure II‐1:Affectation des canaux de WAVE (a) et de ETSI ITS (b) [10] ... 28 Figure II‐2: Suite de protocoles WAVE pour les communications DSRC [10]. ... 29 Figure II‐3: Division temporelle en intervalles CCH et en intervalles SCH [2]. ... 30 Figure II‐4: Architecture de l'ETSI ITS [10]. ... 31 Figure III‐1 : Pseudo code de l’algorithme du protocole DHVN ... 39 Figure III‐2: Algorithme simplifié du protocole DHVN ... 40 Figure IV‐1 : Illustration de l'architecture d’iTetris ... 48 Figure IV‐2 : La plateforme de simulation hybride Veins ... 49 Figure IV‐3 : Comparaison du temps de calcul en fonction de la taille du réseau. ... 55 Figure IV‐4 : Comparaison de l'utilisation de la mémoire en fonction de la taille du réseau. . 55 Figure IV‐5 : Les principaux modules de NS3 ... 56 Figure IV‐6 : L'architecture de nœud NS3 ... 57 Figure IV‐7 : L'architecture du WifiNetDevice dans NS3. ... 60 Figure IV‐8 : Modèle NS3 de propagation dans le Wifi ... 61 Figure IV‐9. Chaîne sans fil à base d’arbre quadratique utilisée dans VNS ... 64 Figure IV‐10 Le fonctionnement du filtrage des voisins dans la plage de communication R. Le nœud rouge est l'émetteur et les nœuds bleus sont les récepteurs. ... 64 Figure IV‐11 L'architecture VNS, où le simulateur de trafic est intégré au simulateur de réseau via le module d'interface réseau ... 65 Figure IV‐12 Etapes de simulation de DIVERT et NS3 dans la boucle d'exécution de VNS ... 66 Figure IV‐13 Exemple du principe adopté pour la détermination des angles nécessaires pour le calcul de l'algorithme DHVN ... 67 Figure IV‐14 : L’algorithme de détection de la position relative d’un véhicule par rapport à un autre. ... 69
Figure V‐1: Résultat de la simulation urbaine du protocole DDT ... 76 Figure V‐2 : Résultat de la simulation rural du protocole DDT ... 76 Figure V‐3: Résultat de la simulation urbaine du protocole DHVN ... 77 Figure V‐4: Résultat de la simulation rural du protocole DHVN ... 77 Figure VI‐1: Résultats de la simulation du protocole DHVN pour différentes durées du TTL et une période SNF de 45 secondes en environnement urbain ... 81 Figure VI‐2: Résultats de la simulation du protocole DHVN pour différentes durées du TTL et une période SNF de 20 secondes en environnement rural. ... 82 Figure VI‐3 : Algorithme du protocole opportuniste DHVN ... 84 Figure VI‐4: Algorithme simplifié du protocole oDHVN ... 85 Figure VI‐5: Résultats de simulation du protocole opportuniste oDHVN pour différentes durées de TTL en milieu urbain ... 86 Figure VI‐6: Résultats de simulation du protocole opportuniste oDHVN pour différentes durées de TTL en milieu rural ... 87 Figure VI‐7: Comparaison entre le protocole DHVN et oDHVN en milieu urbain ... 88 Figure VI‐8: Comparaison entre le protocole DHVN et oDHVN en milieu rural ... 88 Figure VII‐1 : Le plan Manhattan mixte et les différents chemins programmés représenté par des flèches de différentes couleurs ... 91 Figure VII‐2 : Plan de simulation mixte (urbain/rural) utilisé dans la simulation, les lignes rouges représentent les messages envoyés entre deux voitures ... 92 Figure VII‐3 : Résultat de simulation du protocole DDT dans un plan Manhattan mixte ... 93 Figure VII‐4: Résultat de simulation du protocole DHVN dans un plan Manhattan mixte ... 93 Figure VII‐5 : Résultat de simulation du protocole oDHVN dans un plan Manhattan mixte ... 94 Figure VII‐6: Résultats de la simulation dans un plan Manhattan mixtes du protocole hybride DDT/oDHVN ... 95
L
ISTE DES TABLEAUX
Tableau 1: Les normes DSRC au Japon, en Europe et aux États‐Unis ... 22 Tableau 2: les paramètres d’entrés d’une simulation VNS ... 74 Tableau 3: les paramètres de simulation du DDT et DHVN (Urbain et Rural) ... 75 Tableau 4 : Comparaison entre le protocole DHVN de base et notre version amélioré oDHVN. ... 89 Tableau 5 : Les paramètres d’entrés ... 91 Tableau 6 : Plan de simulation proposé ... 92
A
CRONYMES
DDT Distance Defer Transfer DES Discrete Event‐based Simulation DHVN Dissemination protocol for Heterogeneous Cooperative Vehicular Networks DSRC Dedicated Short Range Communication GPS Global Positioning System Ics Interface du système de control IEEE Institute of Electrical and Electronics Engineers ITS Intelligent Transportation System OSI Open Systems Interconnection IVC Inter Véhicule Communication MANET Mobile Ad‐hoc Network NIM Network Intégration Module NS‐2 Network Simulation ‐2 NS3 Network Simulation ‐3 OBU On‐Board Unit oDHVN Opportunistic DHVN RSU Road‐Side Unit SNF Store‐And‐Forward STRAW STreet RAndom Waypoint SUMO Simulator of Urban MObility V2V Vehicle to Vehicle VANET Vehicular Adhoc Network
VNS Vehicular Network Simulator WIFI Wireless Fidelity 3GPP Third Generation Partnership Project LTE Long Term Evolution QoS Quality of Service DOT Department Of Transportation
CHAPITRE
1
I I
NTRODUCTION GENERALE
P
RESENTATION DE LA PROBLEMATIQUEUne étude faite par les experts de l'Institut des ingénieurs électriques et électroniques (IEEE) prévoit que des véhicules autonomes ayant des capacités de coopération entre eux représenteront 75% du trafic total sur la route d’ici 2040 [1]. En effet, cette prévision est due au fait que les nouvelles infrastructures véhiculaires, et les nouvelles technologies de communication automobiles convergent et tendent vers un même objectif : plus de confort et de sécurité pour l’humain, ce qui a permis à la recherche de se développer dans le domaine des VANETs (Vehicular Adhoc Networks) pour atteindre de nouveaux horizons. Ces avancées saisissantes ont permis aux ingénieurs et aux chercheurs de prédire l’avenir des véhicules futurs qui seront basés non seulement sur les capteurs embarqués, mais aussi sur la communication entre les véhicules.
Le réseau véhiculaire VANET permet une communication sans fil entre les véhicules en mouvement via une unité de transmission appelé communément OBU (On‐Board Unit) et permet également aux véhicules de communiquer avec un équipement fixe à proximité de la route RSU (Road side unit) en utilisant une communication dédiée à courte portée [2]. Ces progrès technologiques, concernant la communication mobile, forment deux architectures (domaines) différentes pour le déploiement des réseaux véhiculaires.
Le premier domaine concerne les Réseaux ad‐hoc véhicule‐à‐véhicule (V2V) qui permet la communication directe entre les véhicules et est principalement utilisé pour la diffusion des données. Le deuxième domaine concerne les Réseaux de véhicules à infrastructure (V2I) où les véhicules communiquent avec l'infrastructure routière et dont le but principal est la collecte de différents types d’informations (sécuritaire, trafic, météorologique…) et permet également aux véhicules de se connecter à Internet. Dans les deux domaines, la communication est régie par l’utilisation des protocoles de diffusion de données qui distribuent et fournissent des informations aux conducteurs, aux passagers et
aux véhicules dans une zone d'intérêt donnée. Le défi de ces protocoles est de savoir comment distribuer l'information efficacement, compte tenu de la dynamique et de la mobilité des véhicules dans un réseau VANET.
Beaucoup de travaux de recherches sont entamés, ayant pour but de concevoir, tester et comparer des protocoles VANET, cependant la topologie dynamique du réseau qui est due à la grande mobilité des véhicules, à la présence de bâtiments et autres obstacles qui perturbent la communication sans fil fait en sorte que l’évaluation d’un réseau VANET est une tâche difficile. Toutefois la mobilité des véhicules suit certains groupes de règles, ce qui rend le système plus au moins prédictible et qui a permis aux chercheurs de proposer et d’implémenter plusieurs simulateurs de mobilités. Ces derniers essaient de se rapprocher de l’environnement du trafic réel pour proposer des modèles de mobilité véhiculaire dont le choix doit être pris en compte lorsque nous discutons de la diffusion des données dans les réseaux VANETs. En effet, d'une part, la mobilité peut affecter les protocoles de routage, la connectivité, la livraison des paquets, les retards, la congestion etc. D'un autre côté, la mobilité elle‐même peut être affectée par de nombreux facteurs, notamment la construction de rues, la taille des blocs, le mécanisme de contrôle de la circulation…etc. Ainsi c’est naturel de constater que les performances de n'importe quel protocole VANET sont principalement déterminées par les modèles de mobilité du véhicule[3] [4].
Le modèle de macro‐mobilité et le modèle de mobilité microscopique sont les principales catégories des modèles de mobilité [5]. La macro mobilité décrit et traite les contraintes de mouvement, telles que la topologie routière, les caractéristiques de la rue, les feux de circulation, les obstacles, la densité et la distribution des véhicules. La micro‐mobilité définit le mouvement de chaque véhicule et son comportement vis avis des véhicules voisins. Par conséquent l’évaluation de l’efficacité de protocole VANETs pour un type d’application donnée (sécurité ou divertissement) nécessite l’utilisation d’un bon model de mobilité bien choisi et réfléchi.
M
ETHODOLOGIES ETC
ONTRIBUTIONSL'évaluation de la fiabilité et de la performance d'un protocole de diffusion est la clé du choix du bon protocole pour l'utilisation prévue. Une telle évaluation passe inévitablement par le processus de simulation VANET. Dans ce travail, nous utilisons le logiciel open source très pratique VNS couplé avec le simulateur bien connu NS3 pour étudier un couple de protocoles de diffusion (DDT et DHVN) dans une carte classique de Manhattan. Nous utilisons deux environnements de simulation correspondant respectivement aux zones urbaines et rurales et les résultats de performance des deux protocoles sont présentés et analysés. Les résultats sont utilisés pour atteindre deux objectifs. Le premier objectif est d’ajouter une contribution dans le domaine de la dissémination des messages dans les réseaux VANETs. Cette contribution est représentée par l’amélioration du protocole DHVN afin de proposer un nouveau protocole que nous avons appelé oDHVN. Cet algorithme est le fruit d'une analyse réfléchie du comportement et des performances du protocole DHVN standard dans les environnements urbains et ruraux. Nous allons présenter les résultats des simulations effectuées sur la plateforme VNS pour le DHVN standard et l’oDHVN introduit.
Le deuxième objectif est de souligner le besoin d'un cadre de mobilité plus réaliste mais pratique non seulement pour valider le processus de simulation VANET mais aussi pour montrer la valeur ajoutée importante introduite en utilisant un protocole spécifique représentant la catégorie émergente des protocoles de dissémination opportuniste. A cette fin, nous nous sommes intéressées à l’implémentation du modèle de mobilité Manhattan dans VNS, sous lequel nous avons évalué les performances de plusieurs protocoles de dissémination de données. Nous avons étudié l’influence des paramètres du modèle de mobilité (taille de blocs et densité de véhicule) sur ces derniers. Malgré le fait que le simulateur de mobilité dans VNS nous donne la possibilité d’utiliser des plans de villes réelles, la mise au point des détails au sein d’un tel plan réaliste peut être très couteuse en temps et en efforts. Ce qui nous a poussé à proposer un modèle de mobilité utilisant un plan Manhattan mixte pour tester les protocoles de dissémination émergeant d’une façon plus réaliste, tout en évitant la complexité générée par un plan réel.
S
TRUCTURE DUM
ANUSCRITLa thèse est structurée en deux parties principales. La première partie présente les concepts ainsi que les méthodes que nous avons adoptées dans notre travail. Dans la deuxième partie nous illustrons nos contributions et les résultats obtenus par les différentes implémentations et simulations. Un premier chapitre est donné sous forme d’introduction générale. La première partie est composée de trois chapitres, le deuxième chapitre expose des généralités sur les VANETs en détaillant leurs architectures, propriétés, applications et suivi des normes et standards. Dans la continuation de l’exposition des concepts liés à notre travail, Le chapitre 3 présente différents travaux existants dans la littérature sur les protocoles de dissémination VANET ainsi que leur classification. Ce travail a donné lieu à une communication oral dans la conférence INDS « International Conference on Advanced Networking, Distributed Systems and Applications » 2014. Nous passons par la suite à l’introduction des méthodes d’étude et d’évaluation dans le quatrième chapitre qui donne un état de l’art sur les outils de simulation VANET en général et la plateforme de simulation VNS en particulier. Dans ce chapitre les différents composants d’un simulateur réseau sont illustrés avec une attention particulaire aux modèles de mobilités et leurs implémentations dans VNS.
La deuxième partie comporte trois chapitres résumant la concrétisation de notre recherche par nos contributions. Le chapitre 5 illustre notre exploration des performances de certains protocoles existants bien connus (DHVN et DDT) dans les environnements urbains et ruraux en utilisant l'implémentation de la carte de Manhattan dans le simulateur VANET VNS. Nous proposons par la suite dans le chapitre 6 un nouveau protocole DHVN opportuniste amélioré que nous appelons oDHVN. Dans ce chapitre nous détaillons l’algorithme de notre extension à ce protocole et nous comparons les résultats de simulations de celui‐ci dans l’environnement urbain et rural avec ceux du protocole original DHVN. Ce travail a donné lieu à une publication dans le journal IJACSA « International Journal of Advanced Computer Science and Applications », indexé Thomson Reuters et Scopus.
Afin de garantir la valeur ajoutée de notre protocole oDHVN, nous avons proposé dans le chapitre 7 une version modifiée du modèle Manhattan en utilisant une carte de Manhattan mixte qui est plus réaliste mais pratique combinant les aspects urbains et ruraux. Nous avons utilisé ce plan pour étudier les protocoles DDT, oDHVN et un troisième protocole générique hybride. Ce dernier est construit en mélangeant les protocoles DDT et oDHVN pour donner un exemple de la nouvelle catégorie de protocoles de dissémination opportuniste. Ce travail a donné lieu à un article en voie de publication. Nous finalisons avec une conclusion générale de notre travail, avec un résumé de nos contributions, suivie par des perspectives sur des travaux futurs concernant les communications inter‐véhicules dans les VANETs. Les travaux de communications et de publications accomplies dans le cadre de ce travail sont listés à la fin de la thèse suivie par la liste des références et une annexe où un exemple du script sci‐python utilisé pour piloter la simulation VNS est donné.
P
ARTIE
I :
C
ONCEPTS ET
M
ETHODES
II Généralités sur les VANETs ... 20 III Les Protocoles de Dissémination dans les VANETs ... 33 IV L’outil de Simulation VNS ... 43
CHAPITRE
2
II G
ENERALITES SUR LES
VANET
S
I
NTRODUCTIONLes progrès continus accomplis, au cours des dernières années, dans les technologies de communication sans fil ont abouti à un ensemble extrêmement important de nouveaux domaines de recherche en réseau visant à étendre la connectivité à des environnements où les solutions filaires ne sont pas réalisables. À ce titre, Vehicular Adhoc NETworks (VANETS) est l'un des domaines de recherche les plus fertiles et les plus prometteurs pour les chercheurs, les constructeurs automobiles et les administrations publiques étant donné leur engagement à offrir des routes plus sûres et une conduite plus souple.
Les applications prometteuses des VANETs ne se limitent pas seulement à la sécurité routière, à l'optimisation du trafic des véhicules comme le contrôle de la congestion du flux de véhicules et l'optimisation des routes, mais s'étendent vers des applications commerciales comme le partage de fichiers, l'accès à Internet ainsi que la notification sur des lieux de stationnement. Nous présentons dans ce chapitre les concepts des réseaux véhiculaires en donnant en premier lieu les principaux composants de ces réseaux et les différents domaines de communication. Ensuite, nous citons les principales catégories et caractéristiques des applications des réseaux véhiculaires. Après cela, diverses technologies d'accès au support sans fil pratiques et utiles sont décrites et commentées ainsi que des normes officielles pour les VANETs.
A
RCHITECTURE DES RESEAUXVANET
SLes réseaux VANETs sont considérés comme une sous classe des réseaux MANETs (Mobile Ad‐hoc Networks), déployés pour assurer la communication au sein d'un groupe de véhicules intelligents. Ces derniers doivent être équipés d’une plate‐forme de traitement informatique, de dispositifs de communication sans fil et de systèmes de positionnement géographique GPS (Global Positioning System).
L’ensemble de ces composants permet de gérer la communication, de collecter les données via des capteurs et de traiter les données entrantes et sortantes. Il existe trois composants principaux dans les VANETs: des unités embarquées au sein des véhicules OBU (On‐Board Unit), des unités placées le long des routes RSUs (Road Side Unit)et le canal qui peut être soit câblé (inter‐RSUs) soit sans fil (OBU à RSU et OBU à OBU)[6].
L’OBU est un dispositif matériel équipé d’une antenne radio émettrice/réceptrice utilisé pour échanger des informations avec des RSUs ou avec d'autres OBUs. Il est également composé d’un processeur et d’une mémoire de lecture/écriture pour permettre le stockage d’informations ainsi que leurs récupérations, d’une interface utilisateur et de capteur GPS.
L’RSU est équipé des mêmes composants que l'OBU avec des interfaces filaires et sans fils. Ils sont généralement positionnés dans des endroits à forte densité tels que les intersections et les stations‐service et peuvent être placés à côté de la route à intervalles réguliers, ou être intégrés dans des infrastructures routières existantes comme les panneaux routiers, ponts ou barrières de péage.
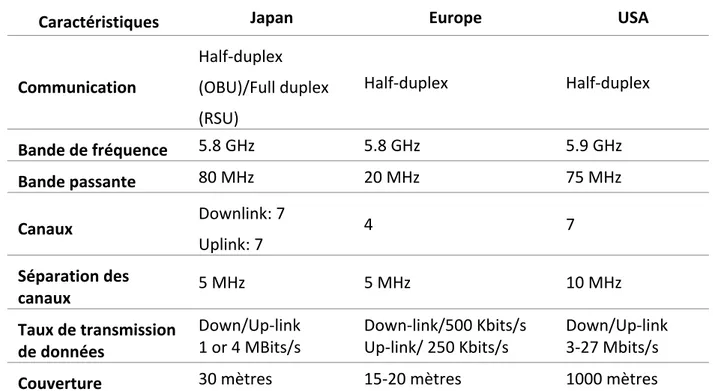
Le canal : le canal sans fil dans les VANETs est caractérisé par plusieurs aspects principaux selon le standard DSRC (Dedicated Short Range Communication) qui a été développé spécialement pour les communications de véhicule à véhicule et de véhicule à infrastructure et pour répondre aux exigences des réseaux VANETs. Ces communications couvrent un large éventail d'applications auxquelles différentes bandes de fréquences sont attribuées et réservées. La norme DSRC a des caractéristiques différentes au Japon, en Europe et aux États‐Unis. La comparaison des différences régionales dans DSRC a été résumée dans [7].
Caractéristiques Japan Europe USA Communication Half‐duplex (OBU)/Full duplex (RSU) Half‐duplex Half‐duplex Bande de fréquence 5.8 GHz 5.8 GHz 5.9 GHz Bande passante 80 MHz 20 MHz 75 MHz Canaux Downlink: 7 Uplink: 7 4 7 Séparation des canaux 5 MHz 5 MHz 10 MHz Taux de transmission de données Down/Up‐link 1 or 4 MBits/s Down‐link/500 Kbits/s Up‐link/ 250 Kbits/s Down/Up‐link 3‐27 Mbits/s
Couverture 30 mètres 15‐20 mètres 1000 mètres
Tableau 1: Les normes DSRC au Japon, en Europe et aux États‐Unis
L'architecture décrite ci‐dessus d'un réseau véhiculaire permet différents domaines de communication :
Le domaine Véhicule à Véhicule (V2V) : Afin d'échanger des messages issus de diverses applications au sein du réseau véhiculaire, ce dernier permet aux véhicules représentés par le composant OBU de s'interconnecter et de communiquer entre eux sans le support d'infrastructure intermédiaire. Une diffusion multi‐sauts est utilisée dans ce domaine de communication V2V afin de disséminer les données vers un ensemble de véhicules récepteurs. Le domaine Véhicule‐à‐Infrastructure (V2I ou I2V) : Le véhicule communique avec les RSUs via le réseau VANET afin de collecter des informations sur le trafic, sur les données météorologiques ou géographiques et permet également aux véhicules d'augmenter leur couverture de communication pour la diffusion des données et de se connecter au réseau Infrastructure et à Internet. Une diffusion à un seul saut est adoptée par ce domaine de communication.
Le domaine Infrastructure‐à‐Infrastructure (I2I) : Les RSUs sont connectées entre elles par le biais d’un canal câblé afin de coopérer à la dissémination de messages liés à la sécurité routière ou dans des réseaux cellulaires externes (GSM, GPRS, UMTS, WiMax et 4G) afin de se connecter à Internet pour des applications autres que la sécurité.
P
ROPRIETES DES RESEAUXVANET
SLes VANETs sont similaires aux MANETs, car les deux prennent en charge les communications ad hoc entre les nœuds mobiles dans des scénarios de réseau dynamique. Néanmoins, les études de recherche et les travaux réalisés dans le domaine des MANETs ne peuvent être appliqués directement dans le contexte des réseaux de véhicules car ces derniers présentent des spécificités et des caractéristiques uniques [8] :
Topologie et densité du réseau : Contrairement aux réseaux MANETs, les VANETs se caractérisent par une grande mobilité due aux vitesses élevées des véhicules en mouvement, entraînant ainsi des changements rapides dans la topologie du réseau. Ces changements de topologies sont aussi provoqués par le conducteur affecté par la nécessité de réagir aux données reçues via le réseau. De plus, la densité du réseau dans les VANETs varie en fonction de la densité du trafic, qui peut être très élevée en région urbaine et en cas d’embouteillage, ou très faible en région rurale. Ainsi, les protocoles de dissémination dans les VANETs doivent faire face à ces défis de variation de densité pour bien fonctionner, car la déconnexion continue implique des pertes de données ainsi que des retards pour la retransmission des données.
Contraintes d’énergie négligeables : Contrairement aux MANETs où la contrainte énergétique représente un facteur majeur et contraignant, les véhicules ont de grandes capacités énergétiques puisque ces derniers peuvent fournir une alimentation continue à l’OBU via leur batterie. Par conséquent, le système embarqué peut être entièrement alimenté et les différents traitements requis peuvent être réalisées. Prédiction de la mobilité : Sur les autoroutes, les routes ainsi que les rues, les véhicules sont contraints par la topologie de ces derniers et par l'obligation de respecter les panneaux de signalisation et les feux de circulation, de se déplacer selon une trajectoire prédéfinie menant à la prévisibilité de la position future du véhicule en mouvement en fonction de la carte routière, de la vitesse et de la densité du trafic. La prédiction des positions permet de concevoir des protocoles plus efficaces et de déduire la connectivité entre les nœuds.
Réseau à grande échelle : La taille du réseau véhiculaire pourrait être grande dans les zones denses telles que le centre‐ville, les autoroutes et à l'entrée des grandes villes. Cette propriété est un facteur important qui doit être pris en considération lors de la conception et le développement de protocole dédié aux réseaux VANETs. En effet, ce dernier pourrait complètement ne plus fonctionner (création d’un goulot d’étranglement / une collision) lors de l’échange d’une grande quantité d’informations entre les véhicules.
A
PPLICATIONS DES RESEAUXVANET
Les communications véhiculaires offrent un grand potentiel pour accroître la sécurité routière et la prise de conscience des conducteurs pour un danger donné. En effet, selon des études pertinentes, 60% des accidents peuvent être évités si le conducteur avait été alerté une demi‐seconde avant la collision. Néanmoins, les avantages ne sont pas limités seulement au point de vue de la sécurité, mais s'étendent à d'autres horizons en utilisant une multitude de technologies de coopération. En fait, les applications VANETs peuvent être divisées en trois catégories qui sont la sécurité, efficacité du trafic et les applications d'info‐divertissements. Dans ce qui suit, nous nous concentrons uniquement sur quelques schémas clés de chaque catégorie [8]. II.4.1 Les applications de sécurité Cette première catégorie d’applications joue un rôle essentiel dans la protection des conducteurs. En effet, les applications de sécurité sont développés pour prévenir les collisions, éviter les accidents, détecter les obstacles sur les routes et de garder le conducteur et les passagers en sécurité pendant leurs voyages en distribuant des informations sur l’environnement, sur l'état du véhicule et sur les conditions météorologiques, etc. Quelques cas d’utilisation sont donnés ci‐dessous [9] : Évitement des collisions aux intersections : De nombreuses applications font partie des systèmes d’évitement de collision aux intersections qui sont basées sur la communication I2V, V2I ou V2V. On peut citer comme exemples d’applications ; Avertissement de violation des feux de circulation, Avertissement de violation du panneau d'arrêt, Assistant de mouvement d'arrêt, Avertissement de collision à l’intersection et l’application pour des renseignements sur le passage pour piétons à l’intersection.Ces différentes applications ont pour objectif d'avertir les conducteurs des situations dangereuses pouvant survenir si leurs véhicules passent par une intersection donnée. Ceci est réalisé par l’envoi de données collectées à partir des capteurs routiers et des OBUs de véhicules.
Sécurité publique : Ce type d’applications vise à aider les conducteurs dans le cas d’accidents et de permettre aux équipes d’urgence à réduire leur temps de déplacement pour un accès rapide à leurs services. Les applications les plus connues dans cette catégorie sont : Avertissement pour approche de véhicule d'urgence, Alerte de sauvetage qui permet de mettre tous les feux de circulation en vert sur l'itinéraire vers la destination, Services SOS.
Extension de panneaux : Le but principal de ce genre d’applications est d'alerter les conducteurs inattentifs sur les panneaux placés sur le bord de la route pendant la conduite afin d'éviter les accidents. Ces applications peuvent être classées comme suit : Signalisation embarquée afin d’envoyer des messages d'alerte aux véhicules qui approchent des zones scolaire, hospitalière ou une zone de passage d'animaux. Avertissement de vitesse de virage, Avertissement de hauteur maximal de passage etc.
Informations provenant d'autres véhicules : Les informations en provenance d'autres applications véhiculaires peuvent être classées comme suit :
Avertissement d'événement météorologique pour informer les véhicules de problème de visibilité afin de réduire leur vitesse et d'être prudents.
Avertissement sur les événements de la route qui vise à prévenir de potentiels accidents avant qu'ils ne surviennent.
Feux de freinage électroniques d'urgence (EEBL Emergency Electronic Brake Lights) pour des besoins de freinage brusque lors d’une faible visibilité ou, quand les feux de position ne sont pas suffisamment lumineux pour être remarqués par les autres conducteurs.
Alerte de changement de voie conçu pour éviter les accidents qui pourraient survenir en raison de décisions de changement de voie dangereuses prises par le conducteur etc.
II.4.2 Les applications pour l’efficacité du trafic
Cette deuxième catégorie d'applications vise à informer les conducteurs sur les flux de trafic afin de gérer efficacement le trafic et d’éviter la congestion. Comme cas d'utilisation, on peut citer :
Services de gestion de la congestion : les véhicules et l'infrastructure de surveillance (RSU) recueillent des informations sur le trafic, prédisent la congestion et optimisent les signaux des feux de circulation pour gérer le flux de trafic. Les véhicules pourraient ainsi choisir les meilleurs itinéraires pour éviter la congestion. Gestion des parkings : l'objectif est d'utiliser efficacement les ressources de stationnement et d'obtenir des informations sur les prix et la disponibilité des places de stationnement. II.4.3 Les applications d'info‐divertissements La troisième catégorie d'application vise à apporter un confort aux conducteurs et aux passagers pendant leur voyage. Elles fournissent aux voyageurs le soutien nécessaire en matière d'informations, de publicités commerciales, de divertissement et de distraction pour rendre le voyage plus agréable. Elles peuvent également fournir un accès à Internet, des services d'informations personnalisés ou permet le partage de fichiers et le streaming vidéo. Les applications de confort ne sont pas des applications sensibles aux délais et peuvent tolérer des retards, Cependant, ils peuvent avoir besoin de ressources en bande passante importantes en fonction de la quantité d'informations échangées.
T
ECHNOLOGIES DE COMMUNICATION,
N
ORMES ETS
TANDARDSDe nombreuses organisations sont impliquées dans l'effort de normalisation des technologies véhiculaires et de leurs architectures réseau. Les architectures de communication sont généralement basées sur le modèle en couches OSI (Open Systems Interconnection). Pour les VANETs, chaque catégorie d'applications nécessite des exigences différentes en termes de délai, de consommation de bande passante et de QoS (Quality of Service). Par exemple, les applications de sécurité nécessitent des exigences strictes en
D'autre part, les applications d'info‐divertissements sont caractérisées par une consommation excessive de bande passante. Différentes architectures offrant différentes technologies d'accès au réseau ont été proposées pour répondre à cette diversité en terme de besoins et d’exigences. Pour les VANETs, il existe deux principaux types de technologies d'accès, les technologies de communication à longue distance et les technologies de communication de courte portée. Le premier se réfère principalement aux réseaux cellulaires alors que le deuxième comprend principalement le Wifi et le IEEE 802.11p [10].
II.5.1 Le réseau cellulaire
Il existe deux grands organismes de normalisation qui régissent la spécification des réseaux cellulaires, à savoir le 3GPP (Third Generation Partnership Project) et IEEE. (Institute of Electrical and Electronics Engineer). Les normes proposées par 3GPP sont GSM (Global System for Mobile Communications), UMTS (Universal Mobile Telecommunications System) et LTE (Long Term Evolution). L’IEEE a proposé le standard WiMAX pour la communication à grande portée dans les scénarios urbains, mais, pour diverses raisons, le groupe de travail de WiMAX a rejoint celui de LTE. Le système LTE est basé sur une architecture plate entièrement IP avec un nombre réduit de services réseau. Les transmissions de données, de voix et de signaux IP permettent une meilleure faisabilité et extensibilité du déploiement par rapport aux anciens réseaux cellulaires. En raison de son architecture simplifiée, LTE peut fournir un temps de trajet court avec une latence de près de 100 ms. Ceci est particulièrement avantageux pour les applications sensibles au retard [11].
II.5.2 IEEE 802.11p
En 1999, la Commission de Communication Fédéral (FCC) des États‐Unis a alloué 75 MHz de bande passante spécialisée dans la région 5,9 GHz pour les applications des systèmes de transport Intelligent (STI). Sept canaux de 10 MHz sont alloués pour servir la communication sur la route. Des numéros d’identification spécifiques sont donnés aux sept canaux comme le montre la Figure II‐1(a). Les IDs des canaux sont le 172, 174, 176, 178, 180, 182, 184. Le canal 178 est utilisé pour transmettre et recevoir des messages de contrôle CCH (Control Channel).
Les canaux 172 et 184 sont réservés aux applications de sécurité publique. Cette bande de fréquences dédiée est appelée bande de communication dédiée à courte distance DSRC (Dedicated Short Range Communication). En 2008, la Commission européenne et le Comité des communications électroniques ont également attribué cinq canaux pour les applications STI, à savoir 172, 174, 176, 178, 180, comme le montre la Figure II‐1(b). Depuis 1997 et pour permettre une utilisation efficace de la bande DSRC, le ministère des Transports des États‐ Unis DOT (Department Of Transportation) a développé la norme IEEE 802.11p. Actuellement, l'IEEE 802.11p a été intégré dans la version 2012 de l'IEEE 802.11. Figure II‐1:Affectation des canaux de WAVE (a) et de ETSI ITS (b) [10]
Sur la base d'études de faisabilité, de recherches approfondies et d'essais, l'IEEE 802.11p a adopté la couche PHY de l'IEEE 802.11a et la couche MAC de l'IEEE 802.11e. Les changements essentiels ont été apportés en fonction des besoins et des exigences des applications STI [12] [10].
II.5.3 WAVE (Wireless Access in Vehicular Environment)
Les États‐Unis ont adopté la norme IEEE 802.11p pour les couches inférieures de la pile de protocoles STI appelée pile de protocole WAVE (Wireless Access in Vehicular Environment), comme dans la Figure II‐2. Cette pile comprend également la suite de standard IEEE 1609, par exemple, IEEE 1609.4 pour le fonctionnement multicanaux, IEEE 1609.3 pour les services réseau (y compris le protocole WSMP pour Wave Short Message Protocol) et IEEE 1609.2 pour le service de sécurité. Le dispositif WAVE est défini pour être équipé d'une seule interface radio et peut communiquer sur sept canaux dans des bandes DSRC de 10 MHz.
Figure II‐2: Suite de protocoles WAVE pour les communications DSRC [10].
La norme IEEE 1609.4 a pour objectif de définir un mécanisme permettant aux périphériques qui basculent entre plusieurs canaux de se retrouver. Le problème est particulièrement difficile pour les appareils dotés d'une seule interface radio. La solution IEEE 1609.4 implique deux concepts : le canal de contrôle (CCH) et la division temporelle. Le concept CCH désigne un canal (Ch. 178 aux États‐Unis) comme un canal spécial dit de « Rendez‐vous » sur lequel les périphériques règlent leurs récepteurs de façon régulière. Tous les autres canaux de la bande DSRC sont des canaux de service désignés (SCH). Le concept de répartition dans le temps suppose que tous les périphériques ont accès à l'heure UTC (Universal Coordinated Time). IEEE 1609.4 définit une division temporelle par alternance d'intervalles entre le CCH et le SCH. Au cours d'un intervalle CCH, les périphériques se retrouvent sur le CCH et peuvent ainsi entendre les WSA (Wave Service Advertisement) annonçant la disponibilité de tous les services offerts dans la région immédiate. Le WSA fournit des informations sur un ou plusieurs services et indique le SCH sur lequel le service est proposé. Pendant un intervalle SCH, les appareils peuvent basculer vers l'un des SCHs.
La Figure II‐3 illustre le concept de division temporelle de base défini dans IEEE 1609.4.
Le temps est segmenté en périodes de 100 ms. Chaque période de synchronisation consiste en un intervalle CCH suivi d'un intervalle SCH. La division par défaut est de 50 ms pour chacun. Pour atténuer les erreurs de synchronisation, les premiers 4 ms de chaque intervalle de temps de 50 ms sont laissés à un intervalle de garde.
Figure II‐3: Division temporelle en intervalles CCH et en intervalles SCH [2].
L’architecture en couche pour les communications DSRC prend également en charge l'utilisation de protocoles Internet bien connus pour les couches réseau et transport, à savoir le protocole Internet version 6 (IPv6), le protocole UDP (User Datagram Protocol) et le protocole TCP (Transmission Control Protocol). Ces protocoles, définis par l'IETF (Internet Engineering Task Force) sont stables et bien documentés. Le choix entre l'utilisation de WSMP(WSM Protocol) ou IPv6 + UDP / TCP dépend des exigences d'une application donnée [2].
II.5.4 ETSI ITS (European Telecommunications Standards Institute Intelligent Transport Systems) En Europe, le groupe de l'Institut européen des normes de télécommunications (ETSI) pour les systèmes de transport intelligents a proposé la norme d'architecture ETSI‐ITS illustrée dans la Figure II‐4. Cette architecture est constituée de quatre couches de protocole horizontales (Applications, Facilities, Réseau et transport, accès au support) avec deux entités de protocole verticales : les plans de gestion et de sécurité. La technologie d'accès de cette pile est également basée sur IEEE 802.11p en exploitant une bande de fréquence autour de 5 GHz pour les applications STI. Par conséquent, la technologie d'accès s'appelle STI‐G5. Le dispositif ETSI ITS fonctionne en mode multi‐radio et multicanaux. Cela signifie que la station doit utiliser une interface radio ITS‐G5 exclusive pour échanger des messages de sécurité sur le canal de commande, c.‐à‐d. G5‐CCH, et une autre interface radio ITS‐G5 pour transmettre des messages de service sur le canal de service, G5‐SCH. Ce mode réduit efficacement les collisions synchronisées[10].
Dans ETSI‐ITS, la couche de l’accès au support couvre divers supports de communication (WiFi et cellulaire) et les protocoles associés pour les couches physiques et de liaison de données. La couche Transport et Réseau prend en charge non seulement le protocole TCP / UDP sur le service de réseau IPv6, mais également le protocole BTP (Basic Transport Protocol) sur le service GeoNetworking.
Figure II‐4: Architecture de l'ETSI ITS [10].
La couche Facilities est une nouvelle couche introduite par l'ETSI. Elle permet d’échanger des données avec des couches inférieures et avec des entités de gestion et de sécurité de l'architecture ITS. Elle est considérée comme un middleware qui fournit de multiples fonctionnalités et services, tels que la mise à jour du plan dynamique Local (LDM Local Dynamic Map) à utiliser par la couche applicative supérieure. Les services et fonctionnalités fournies par la couche Facilities peuvent être classées en deux catégories :
(I) Des services et des fonctionnalités fournis pour une ou plusieurs applications spécifiques comme les messages de notification d'environnement décentralisés DENM (Decentralized Environmental Notification Message). Ce dernier contient des informations relatives à un événement pouvant avoir un impact sur la sécurité routière ou l'état de la circulation. Un événement est caractérisé par un type d'événement, une position d'événement, une heure de détection et une durée. Ces attributs peuvent changer dans l'espace et dans le temps. Le protocole DENM est conçu pour gérer la détection des événements, l'évolution des événements et la fin des événements.
(ii) Les fonctionnalités et services de base pour assurer un fonctionnement de différentes applications tels que les messages cognitifs coopératifs CAM (Cooperative Awareness Message). Ce dernier contient des données de véhicule en temps réel ou des données RSU. Il est transmis à haute fréquence depuis un OBU ou une RSU vers d'autres OBU ou RSU situés dans le voisinage immédiat afin de se maintenir mutuellement informé des données respectives [13]
C
ONCLUSIONL'objectif principal de ce chapitre était de présenter les réseaux VANETs comme un paradigme de réseau dans le domaine de la recherche. Ainsi, les VANETs apparaissent comme une forme spécialisée de MANET avec des exigences spécifiques liées aux caractéristiques spécifiques de tels réseaux. Dans ce chapitre, une étude abrégée sur les différentes applications et services ainsi que les différentes normes proposées au cours des dernières décennies ont été brièvement présentés. Le prochain chapitre sera consacré à la classification de protocoles de dissémination dans les VANETs afin de couvrir les principales directions de recherche dans le domaine de la communication inter véhiculaire.
CHAPITRE
3
III L
ES
P
ROTOCOLES DE
D
ISSEMINATION DANS LES
VANET
S
I
NTRODUCTIONUn aspect intéressant des VANETs est que la plupart de leurs applications requièrent un protocole de diffusion de données multi‐sauts efficace et fiable, faisant de cette tâche effectuée par le protocole l'une des fonctions réseaux la plus difficile mais indispensable. Par exemple, l'évitement des collisions de véhicules et l'avertissement après accident nécessitent une diffusion de données efficace et robuste, en particulier lorsque les distances entre l'émetteur et les récepteurs prévus sont supérieurs à la portée de transmission radio [14].
Nous nous sommes concentrés sur les approches qui se focalisent sur la réduction de l’utilisation de la bande passante en limitant le nombre de réémissions avec une sélection optimale des relais et des paramètres de transmission en fonction des conditions du réseau.
T
YPES DEF
ONCTIONNEMENT ET CARACTERISTIQUESNous considérons dans notre travail que les approches de dissémination des données dans les VANETs peuvent être classées en trois catégories principales : La diffusion instantanée avec relai, la diffusion avec relai de type store and forward et la diffusion opportuniste.
Dans certaines approches de la diffusion instantanée avec relais, les données sont diffusées à tous les véhicules voisins qui vont stocker brièvement les données, ensuite certains de ces véhicules sont sélectionnés comme relais pour rediffuser les informations à leur tour. Cette approche fonctionne bien dans les réseaux à haute densité qui permet d’éviter le broadcast storm, mais nécessite une sélection de relais efficace afin d'assurer la fiabilité.
Alternativement, dans l’approche à relai de type store and forward, les données sont stockées, transportées puis rediffusées sur des partitions du réseau, ce qui les rend plus adaptées aux environnements où les véhicules sont distribués de façon irrégulière.
Dans l'approche opportuniste, les deux approches précédentes sont combinées pour pouvoir s’adapter selon les circonstances du réseau (dense, partitionné, taux d’occupation du canal élevé….etc.).
On peut trouver dans la littérature d’autres classifications qui se basent sur d’autres aspects fonctionnels. Dans [14], le flooding est considéré comme une approche à part entière alors qu’on peut le définir comme un cas particulier de la diffusion instantanée avec relai puisque les données sont diffusées à tous les véhicules voisins et qui sont tous considérés comme des relais potentiels pour une rediffusion unique sans temporisation (il n’y a pas le store and forward) à leurs véhicules voisins.
Dans [8], les deux premières approches sont groupés en une seule approche créant ainsi deux catégories ; la diffusion sans état et la diffusion avec état. Dans la première catégorie, il n'y a pas besoin d'obtenir des informations sur la topologie du réseau alors que dans la deuxième catégorie le protocole nécessite des informations sur la topologie locale. Dans [15] les auteurs distinguent deux catégories principales: diffusion multi‐sauts et diffusion simple‐saut. Les auteurs divisent la première catégorie en plusieurs sous catégories selon la méthode d’élection du relai (délai, probabilité) ou selon l’utilisation de la méthode du codage réseau [16]. Dans la diffusion à simple saut, lors de la réception d’un paquet, le véhicule conserve et met à jour l'information dans sa base de données embarquée et diffuse à son tour dans son voisinage à un saut sa version de l’information d’une façon périodique. Les auteurs divisent cette catégorie en deux sous catégories, selon que la période de prise de décision de diffusion soit fixe ou adaptative. Dans un travail plus récent [17], les auteurs reprennent la classification générale multi et simple saut mais adopte un autre raisonnement plus en adéquation avec le nôtre. Dans ce dernier travail, l’accent est mis sur la catégorie multi‐sauts qui regroupe le plus grand nombre de protocole où les auteurs considèrent deux catégories différentes : (i) les méthodes restrictives et (ii) les méthodes promiscues. Comme précédemment, les méthodes restrictives regroupent les techniques permettant de remédier aux problèmes de la tempête de diffusion (Broadcast storm). La différence par rapport au travail précédent réside dans l’introduction de la sous‐catégorie des méthodes promiscues où les VANETs peuvent être fragmentés et partitionnés d’où le recours aux techniques telles que Store‐and‐Forward pour s'assurer que les informations sont correctement diffusées.