Incomplete 3D Motion Trajectory Segmentation and 2D-to-3D Label Transfer for Dynamic Scene Analysis
Texte intégral
Figure


![Fig. 5: Illustration of moving object detection using OSF [27]](https://thumb-eu.123doks.com/thumbv2/123doknet/14239416.486524/9.918.470.837.70.497/fig-illustration-moving-object-detection-using-osf.webp)
Documents relatifs
In conclusion, the obtained results show that TbD-SfM and ETbD-SfM methods can segment dynamic objects using a 6DoF motion model, achieving a low image segmentation error
Paris-Lille- 3D: a large and high-quality ground truth urban point cloud dataset for automatic segmentation and classification. ArXiv
Pourtant la Suisse dépend de l’eau des autres: 80% de l’empreinte eau de la Suisse est à l’étranger, notamment dans des pays déjà frappés de pénurie.. Ainsi en
In the MOD stage, moving objects are detected using the traditional approaches such as inter-frame difference method [25, 93, 46], Markov Random Field [97], implicit shape model
The purpose of our research were (1) to examine whether the building of mental models from animation could be improved by using external simplified model representations of
The focus of this Essay is on the most common loyalty antecedents that are influencing attitudinal and behavioural loyalty, namely loyalty incentives, commitment, perceived value and
In this paper, we propose an 3-Point RANSAC with ICP refinement algorithm to build 3D reconstruction of rigidly moving objects, such as vehicles, using 2D-3D camera setup.. Results
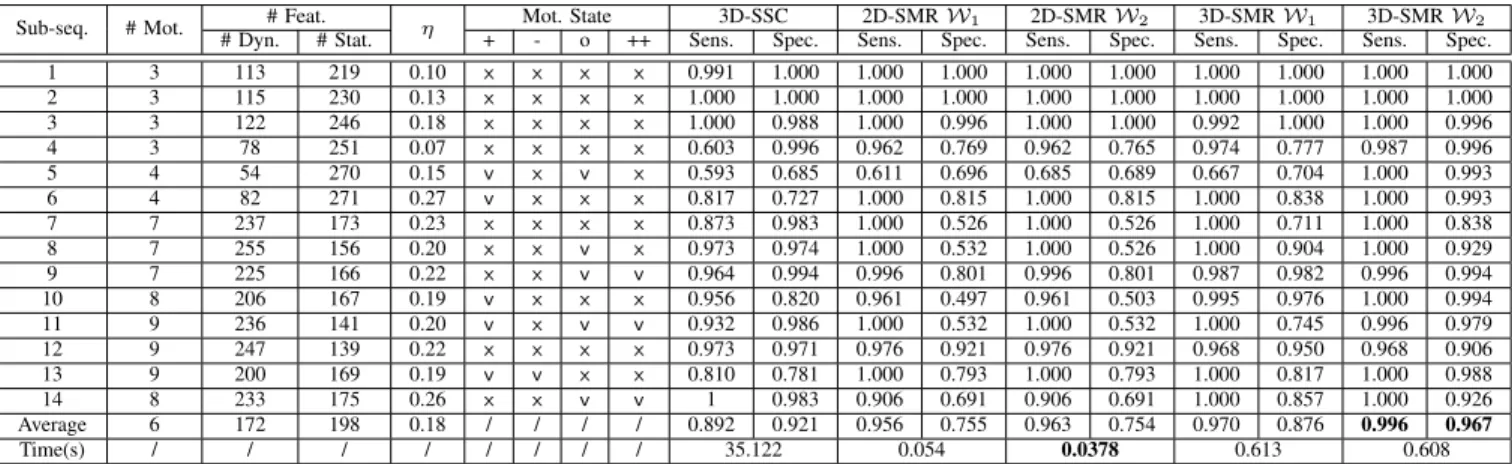
Using the 3D trajectories of sparse feature points, we propose a Sparse Subspace Clustering based 3D (3D-SSC) MS algorithm that categorizes multiple moving objects as well as the
