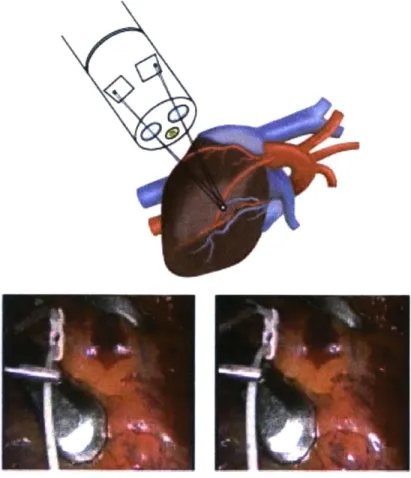
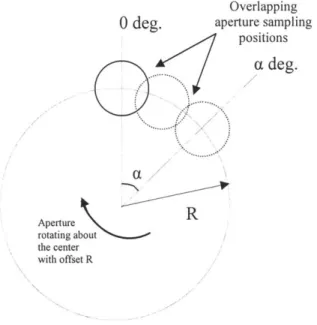
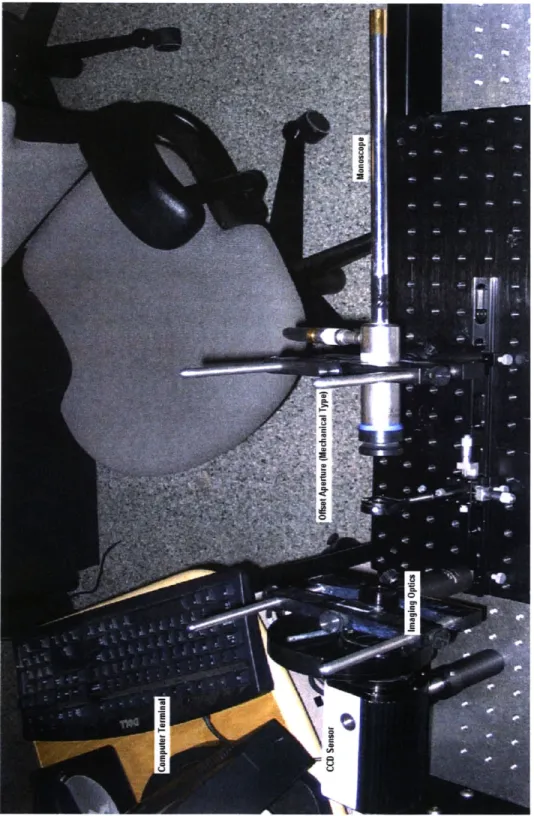
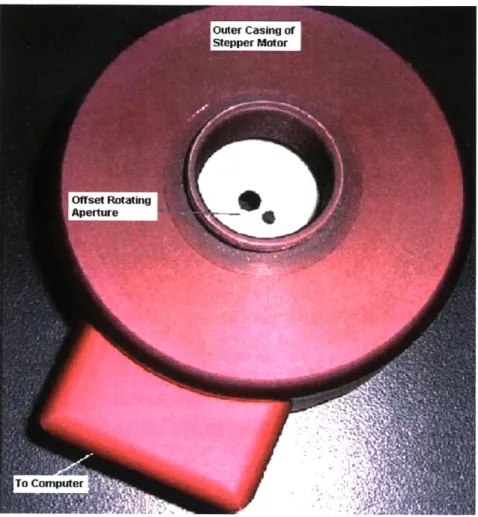
The Active Wave-front Sampling based 3D endoscope
Texte intégral
Figure

Documents relatifs
TORREA, Weighted and vector-valued inequalities for potential operators. 295 (1986),
Thus, in all compound tenses (i.e. tenses where an auxiliary is required, such as the passé composé), adverbs are placed right after the auxiliary and just before the past
Summing up, we can conclude that, on the basis of the method of multidimensional test objects, the incorrect problem of reconstructing the coordinates of objects moving
To test the algorithm for cropping of 3D fragment having the highest visual quality, we developed a software tool for generating a synthetic image of the micro-CT slice (see
Polyominoes, tiling the plane by translation, theorem of Beauquier- Nivat, pseudo-square, pseudo-hexagon, enumeration of special classes of polyominoes.. 1 Laboratoire
If X contains three horizontal dominoes or three vertical dominoes, use the defect theorem for words to obtain the proper Y immediately.. Thus assume that X contains two
We first prove the result for a transversal domain Ω to an optimal ball and we assume that its boundary does not contain segments which are orthogonal to the axis of symmetry.. We
In documentation, just as in history, it is possible to distinguish sources , which indicate the type of information (press, administrative documents, the web, the radio,
