ASSESSING THE RELIABILITY OF COMPONENTS AND COMPLEX SUBSYSTEMS
MITNE-284 July, 1988 Prepared by:
N. Siu T. Pagnoni
ASSESSING THE RELIABILITY OF COMPONENTS AND COMPLEX SUBSYSTEMS
MITNE-284 July, 1988 Prepared by: N. Siu T. Pagnoni Principal Investigator: N. Siu
Department of Nuclear Engineering Massachusetts Institute of Technology
Cambridge, Massachusetts 02139
ACKNOWLEDGEMENTS
This report is part of the MIT Department of Nuclear Engineering project "Nuclear Power Design Innovation for the 1990's." The objective of this project is to assess and explore promising technological avenues for enhancing the
attractiveness of the U.S. nuclear energy option.
Financial support for this study was provided by the Rocketdyne Division of Rockwell International Corporation. The authors would like to acknowledge Bob Lancet of Rockwell International for his support, and Anne Hudson for her
TABLE OF CONTENTS
Section Title Page
1.0 Introduction and Summary 1
1.1 Objectives 1
1.2 Background 1
1.3 Summary of Results 3
2.0 Overview of Approach 5
3.0 Check Valve Characterization 11
3.1 Check Valve Modeling 11
3.2 Check Valve Failure Data 13
4.0 Check Valve Analysis 19
4.1 Failure Mode Identification 19
4.2 Statistical Analysis of MCS Frequencies 19
4.3 Continuous Variable MCS Quantification 22
4.3.1 Independent Failure 22
4.3.2 Dependent Failures 25
4.3.3 Quantification 25
5.0 Concluding Remarks 35
6.0 References 37
LIST OF TABLES
Table Title Page
1 Check Valve Failure Data 14
2 Minimal Cut Sets for Swing Check Valve (Fail to Close) 30
3 Characteristic Parameters for rl(Ad| E) 31
4 Typical Values for Check Valve Wear Model Parameters 32
LIST OF FIGURES
Figure Title Page
1 A Typical Swing Check Valve [8] 7
2 Hypothetical Relationship for Stud and Shaft Wear 8
3a Conventional Fault Tree for Failure Example 9
3b Shorthand Fault Tree for Continuous Variables 9
(Using CAND Gate)
4 Stress-Strength Model 10
5 Multivariable Failure Model 10
6 Regions of Flow-Induced Motion in Check Valves [16] 16 7 Distribution of Failure Types, Swing Check Valve 17
Fail-To-Open (FTO)
8 Distribution of Failure Types, Swing Check Valve 18 Fail-To-Close (FTC)
1. Introduction and Summary
1.1 Objectives
The reliability of a component (or a complex subsystem), the probability that the component will function when demanded and for the duration of the mission, is one of the key parameters to be considered when designing a new component for use in a nuclear power plant safety system. In order to conduct the design optimization process, formal tools for analyzing component reliability are required. These tools
must be capable of treating those characteristics unique to components (as opposed to larger systems composed of components), and must be useful even when no operational or test data are yet available.
The latter case, where the component is still in the design or construction phase, is especially important to the expanded use of reliability analysis methods in the design process. Without success/failure data, of course, the predictions even of formal models will be subject to considerable uncertainty. However, they will show the level of reliability and the principal contributors to failure expected based on the current state of knowledge. Perhaps more importantly, they will also identify levels of key parameters needed to assure a high level of reliability. For example, if
particular component assembly tolerances are identified as being critical to the overall reliability, special attention can be paid to ensuring that these tolerances are met.
This report identifies and, where necessary, develops tools useful for the quantitative reliability modeling of components. These tools are intended for the use of a designer, and are to be applicable even when developing an entirely new design for which no directly applicable failure data are available. The initial area of application is in the design of mechanical components; however, the methods
adopted should be general enough to handle a wide variety of cases. 1.2 Background
Formal methods have been developed to evaluate the reliability of systems composed of components whose individual reliabilities can be estimated from available data, and where the interactions between components are fairly limited (e.g., [1,2]). However, methods to analyze the reliability of the components
component unreliability is quantified using two parameters:
Qd,
the unreliability on demand, and A, the (assumed) constant failure rate of the component. Thehardware unreliability is then given by
Qh Qd+(1-Qd)(1-e
Qd +
Awhere r is the system mission time.
Both
Qd
and A can be estimated from available failure and success data using a variety of approaches. Bayesian methods are generally used when the amount of data is fairly limited and when experts' opinions are employed to supplement the data base [3].More complex models than the Qd-A model can be used, of course. One approach, not generally used in nuclear plant assessments but fairly widespread in other industries, is to assume that the time-to-failure model is governed by a more
complex distribution, such as the Weibull, rather than an exponential distribution. In the case of the Weibull, the single parameter A is replaced by two parameters a and
#:
Qh
~ d + JA(t)dt (1.2)where
A(t)
=at-Equations (1.1) and (1.2) are statistical models for component failure. They quantify the likelihood of failure, but do not identify the failure mode, and,
therefore, do not indicate design options that can be taken to reduce the likelihood of failure. To accomplish the latter objective, a more detailed model of the
component is required.
these methods are not shared by many components.
First, the performance of a standby safety system can usually be modeled in terms of the success or failure of its constituent components. The question of how a system will fail can be answered in terms of discrete combinations of component failures. Thus, a particular swing check valve can be singled out as being a
dominant contributor to unreliability; improvements to increase system reliability can be made by improving the valve or adding a redundant path. At the component level, however, a discrete model may not be as useful. The check valve failure may be due to a combination of continuously varying factors, such as the amount of wear of the valve hinge, the amount of corrosion product build up in the valve body, and so forth, all of which combine to cause overall failure. The failure of the component, therefore, often cannot be resolved in terms of the success or failure of the
component's parts, but rather must be described in terms of continuous changes in these parts and the interaction between the parts.
The second problem, related to the first, is that the current reliability analysis methods for treating interactions between components are not tailored to treat the interactions between component parts. In a standard system analysis, interactions between components are usually limited in number and quite well defined. Cause and effect relationships often are non-existent (e.g., the failure of one valve does not cause the failure of another) or unimportant (e.g., loss of flow through a valve causes pump failure through overheating, but the system is already failed due to loss of flow). Correlation models for treating coupling between components exist (e.g., [4-6]), but are intended to model the more or less simultaneous failure of
components due to a single common cause. Compared with components in a
system, the parts in a component are often more tightly coupled. Changes in a part, which, as indicated above, cannot always be modeled in terms of "success" or
"failure" of that part, affect the behavior of other parts; the combination of changes in all of the parts leads to success or failure of the component.
1.3 Summary of Results
From the above discussion, it can be seen that current plant analysis methods for determining reliability are not completely suited for analyzing components. This
component. Structural reliability analysis methods developed in civil engineering which deal explicitly with continuous systems, are applied when appropriate. A computer code which implements these latter methods, called FORM [7], is useful in this context. Other failure modes are treated using statistical techniques currently used to analyze component failure frequencies.
To ensure a good degree of practicality and realism in the approach, the study is conducted with reference to a particular example: the analysis of swing check valve reliability. This is believed to be a good example because of the simple design involved; a realistic analysis can be performed without becoming overwhelmed by details. It is also a good example because failure data obtained from actual field experience are available, therefore allowing a comparison of the relative importance of the different failure modes.
The characteristics of swing check valves and available information on their failure are outlined in Section 3. The latter information include predictions of engineering models as well as field data. Information has also been obtained from interviews with Professor P. Griffith, an expert on check valve behavior, and with personnel familiar with the operation and failure of check valves in marine
propulsion applications.
The methodology discussed in Section 2 is applied to selected portions of the check valve reliability analysis in Section 4. The purpose is not to actually quantify check valve reliability, but rather to: a) show how this quantification can be
performed, given the available models and data, and b) to show how the
methodology is useful in identifying and quantifying the impact of critical design parameters which can affect reliability.
Section 5 discusses the results of the analysis and how these results can be applied to the design of new components and subsystems.
2. Overview of Approach
From the preceding discussion, component reliability models must treat complex interactions between parts, interactions which are not naturally
represented using discrete logic diagrams. On the other hand, specific component failure modes can generally be identified. The approach adopted, therefore, has
both continuous and discrete features.
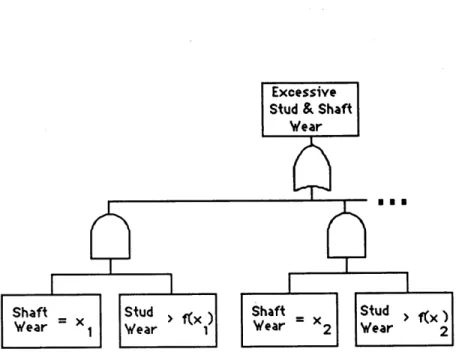
The first step in the analysis is to construct a fault tree for the component. As with any other fault tree, the objective is to identify all of the different mechanisms that may cause failure; special care must be taken to ensure
completeness. Unlike conventional fault trees, the basic events for the tree may include partial failures; a special AND gate the "CAND" gate, is introduced to show that continuous combinations of different levels of degraded part performance can lead to failure. While the CAND gate is an AND gate with respect to the logic structure of the tree, it is not treated as a conventional (discrete) AND gate when quantifying the likelihood of the gate's top event.
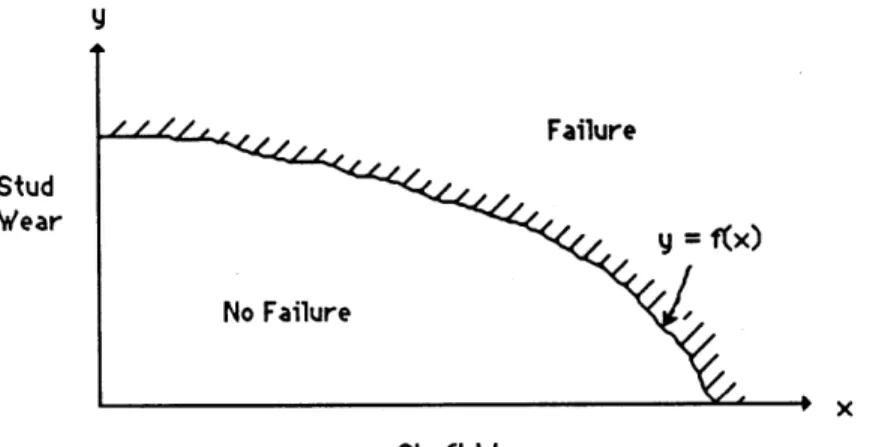
For example, consider a swing check valve where the combined wear of the shaft and of the attaching stud (see Figure 1 [8]) can cause improper seating of the gate. Consider a hypothetical relationship between the wear of the two parts and failure (improper seating) as illustrated in Figure 2, a conventional fault tree for this event is shown in Figure 3a. The corresponding tree which uses the shorthand
CAND notation is shown in Figure 3b.
The second part of the analysis is to quantify the likelihood of the fault tree top event, i.e., to quantify the minimal cut sets of the tree. In some cases, the basic
event likelihoods are determined as in standard analyses (e.g., the frequency of improper re-assembly following maintenance). In others, particularly those linked by CAND gates, a methodology which can treat the interaction of continuous variables is needed.
A direct treatment of continuous variables is suggested by the well-known stress strength model [9]. Let a represent the "stress" on a particular part, and let S represent that part's "strength" with respect to the stress. Let a be a random variable with probability density function p (-) and let S be a fixed value (see Figure 4). Then,
P{failure} = P{Stress > Strength} (2.1) = PU(u)da
An extension of this method to more than one variable is immediately suggested. Let X and Y be two governing random variables with joint density function PXy(-, -), and define a region of failure RF as shown by the shaded area in Figure 5. Then
P{failure} =
J
JPxy(x,y)dxdy (2.2)RF
Two practical problems keep the analysis from being entirely straightforward. First, the key parameters (X and Y in this case), the joint density function, and the failure region must be defined. Depending upon the particular problem, this may
not be an easy task; it is further addressed in the context of check valve analysis in Section 4. Second, a very large amount of computation is required if several
variables, rather than just two, are needed to characterize component failure, or if the parameters of the joint density function are themselves uncertain. Numerical approximations to reduce the computational load have been considered extensively by civil engineers. One approach is to linearize the boundaries of RF and to transform the governing variables (e.g., X and Y) such that the transformed
variables (e.g., X' and Y') follow a multivariate normal distribution. This method, called "First Order Reliability Analysis" [7,10-14], is discussed in the Appendix. An application of this method to the swing check valve problem is discussed in Section 4.
anti-rotation
gate
Stud Wear
No Failure
Shaft Wear
Figure 2: Hypothetical Failure Relationship for Stud and Shaft Wear
Conventional Fault Tree for Failure Example
Figure 3b: Shorthand Fault Tree for Continuous Variables (Using CAND Gate)
Survival W=S Stress Stress-Strength Model V R F
(f eil ure)
Multiveriable Failure Model
Stress pdf Figure 4:
/
x
Figure 5: , . Failure3. Check Valve Characterization
The problem of check valve reliability analysis is selected to provide a simple area of application for the methodology. It should be noted that despite this simplicity, check valve failures are often visible contributors to system unavailability, and the analysis of these failures is therefore important.
A typical check valve design is shown in Figure 1 [8]. It can be seen that the valve has only one moving assembly: the arm/gate assembly. Two failure modes of importance are fail to close (FTC) and fail to open (FTO). The former can be caused by improper seating of the gate on the valve seat which, in turn, can be caused by a number of mechanisms. For example, shaft or hinge wear can lead to vertical displacement of the gate and, therefore, improper seating of the gate. Improper seating can also be caused by cocking of the gate, which may occur after the securing nut is loosened.
In this section, physical models relevant to check valve degradation due to hinge wear and due to gate tapping are briefly outlined and failure data from nuclear power experience are described. The presentation in both cases is not exhaustive; the objective is to indicate the kind of information available for existing components and the failure modes likely to be experienced under realistic operating conditions.
3.1 Check Valve Modeling
Reference 15 presents a number of mechanisms leading to the FTC mode observed in nuclear power plants. Two particular failure initiators analyzed in some detail are hinge wear, which may lead directly to improper seating or to jamming,
and gate tapping against the stop (see Figure 1), which may lead to failure of the cotter pin, loosening of the nut, and eventual improper seating or jamming.
Hinge wear is caused by pivoting of the arm/gate assembly about the hinge. A correlation for the volume of material removed as a function of the flow velocity is [15]:
where
V = rate of volume removal K, F = material constants P = material hardness
Fn = normal force =
[W
- Wa/2l sin(0ave) W = weight of gateWa = weight of arm
[(W
- W a/2)bg-sin( ave _ K pA(vave)2g
b = buoyancy factor for metal in liquid g = acceleration of gravity
p = liquid density A = gate area
vave = average flow velocity
At = sliding distance = 2(Oax - min)eddy
6max = maximum angle of displacement (calculate using vmax) 'min = maximum angle of displacement (calculate using vmin) v. = maximum flow velocity
vm = minimum flow velocity
eddy frequency = 0.04 vave
weddy = r
p r p = pipe radius
Note that vmax and vmin characterize the short time scale fluctuations of flow velocity about vave'
For a given valve in a given application, the only random variable in
Equation (3.1) is vave, the average flow velocity. Thus, if the distribution for vave can be developed, the distribution for the amount of hinge wear can be developed very simply from Equation (3.1).
ratio, where L is the distance of the valve from the nearest flow disturbance in the pipe and D is the pipe diameter. The L/D ratio is an indication of the amount of turbulence at the valve location; high values are associated with fully developed flow, which is less likely to lead to tapping. Not shown in Figure 6 is the frequency of tapping, which probably increases with decreasing L/D.
If the frequency of tapping can be determined as a function of vave and L/D, figures such as Figure 6 [16] can be used to determine the distribution of the number of taps in a given time interval (recall that vave is a random variable). Mechanical models needed to translate the tapping into the likelihood of cotter pin failure, nut
backing off, and subsequent displacement of the gate are still needed. 3.2 Check Valve Failure Data
The above models for check valve behavior focus on specific valve failure modes which can be analyzed using physical principles. While these modes have actually been observed, they are not all-inclusive. Failure mechanisms less
amenable to rigorous theoretical analysis, such as the plugging of the valve by trash in the system, may be equally important, if not more so.
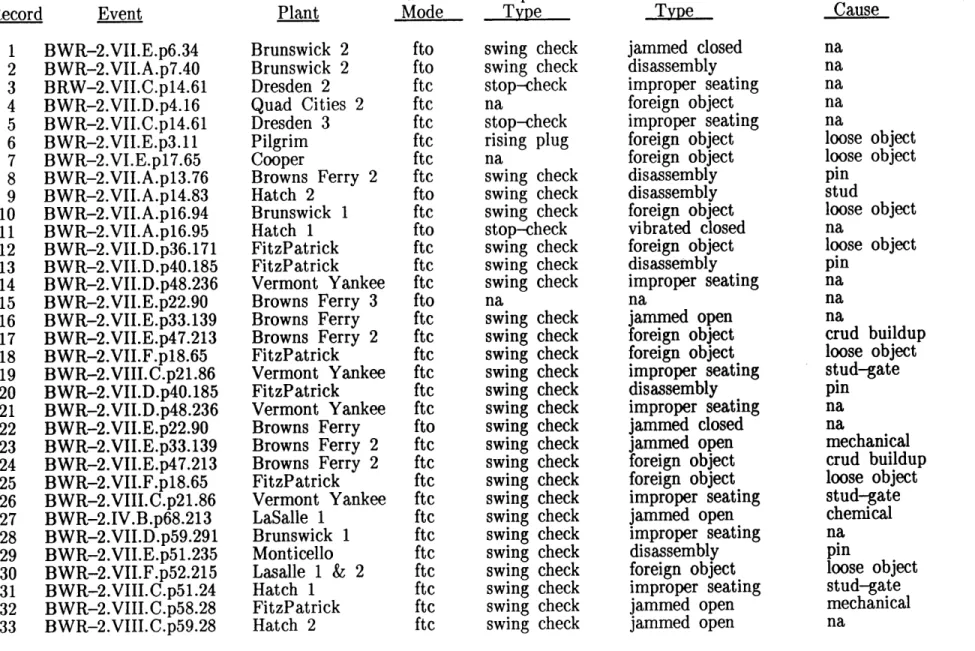
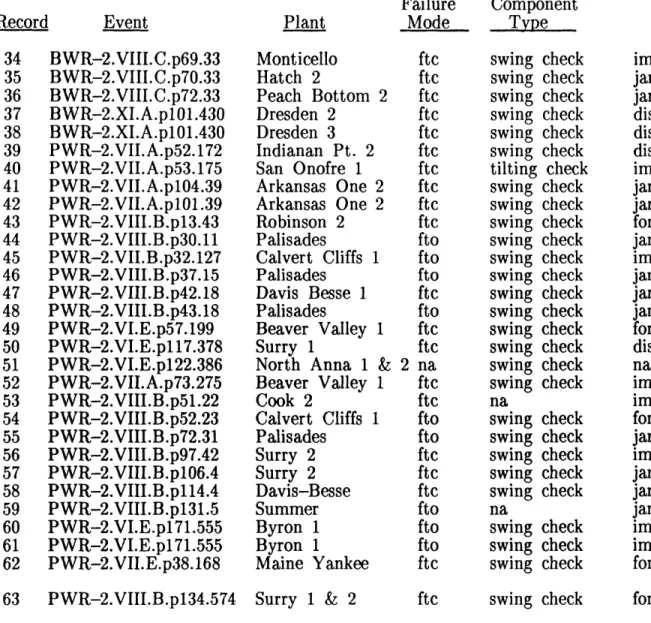
To determine the importance of these other failure modes, and to obtain a general picture of the variety of failures that may be experienced by a mechanical component in real service, descriptions of 63 check valve failures were obtained from Nuclear Power Experience (NPE) [17], covering the years 1975 through 1983. NPE is a private compilation of event narratives based largely, but not entirely, on the Licensee Event Reports (LERs) submitted by the utilities to the United States
Nuclear Regulatory Commission. The narratives vary greatly in detail, but usually indicate such information as the plant name, the date of the incident, the system involved, the failure cause, the failure mode, and the consequences of the event.
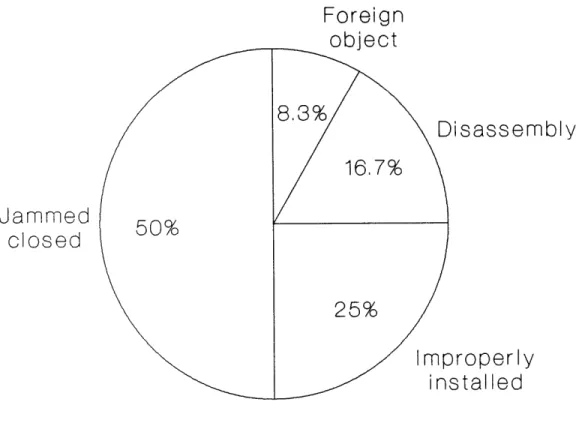
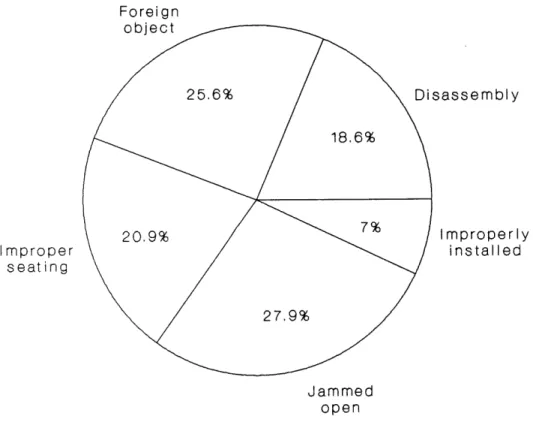
A breakdown of the fail-to-open failure data (12 events) for swing check valves is presented in Figure 7; a similar breakdown for the fail-to-close failure mode (40 events) is presented in Figure 8. Table 1 provides a listing of all of the events considered. The two figures show that both random (e.g., jamming by a foreign object) and degradation-related failures are important. Thus, a complete failure model must address both types of failure.
Table 1 - Check Valve Failure Data (Page 1 of 2) Record Event 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 Plant BWR-2.VII.E.p6.34 BWR-2.VII.A.p7.40 BRW-2.VII.C.p14.61 BWR-2.VII.D.p4.16 BWR-2.VII.C.p14.61 BWR-2.VII.E.p3.11 BWR-2.VI.E.p17.65 BWR-2.VII.A.p13.76 BWR-2.VII.A.p14.83 BWR-2.VII.A.p16.94 BWR-2.VII.A.p16.95 BWR-2.VII.D.p36.171 BWR-2.VII.D.p40.185 BWR-2.VII.D.p48.236 BWR-2.VII.E.p22.90 BWR-2.VII.E.p33.139 BWR-2.VII.E.p47.213 BWR-2.VII.F.p18.65 BWR-2.VIII.C.p21.86 BWR-2.VII.D.p40.185 BWR-2.VII.D.p48.236 BWR-2.VII.E.p22.90 BWR-2.VII.E.p33.139 BWR-2.VII.E.p47.213 BWR-2.VII.F.p18.65 Failure Mode Brunswick 2 Brunswick 2 Dresden 2 Quad Cities 2 Dresden 3 Pilgrim Cooper Browns Ferry 2 Hatch 2 Brunswick 1 Hatch 1 FitzPatrick FitzPatrick Vermont Yankee Browns Ferry 3 Browns Ferry Browns Ferry 2 FitzPatrick Vermont Yankee FitzPatrick Vermont Yankee Browns Ferry Browns Ferry 2 Browns Ferry 2 FitzPatrick fto fto ftc ftc ftc fte ftc ftc fto ftc fto ftc ftc ftc fto ftc ftc ftc ftc ftc ftc fto ftc ftc ftc ftc Failure Type Component Type swing check swing check stop-check na stop-check rising plug na swing check swing check swing check stop-check swing check swing check swing check na swing check swing check swing check swing check swing check swing check swing check swing check swing check swing check Failure Cause jammed closed disassembly improper seating foreign object improper seating foreign object foreign object disassembly disassembly foreign object vibrated closed foreign object disassembly improper seating na jammed open foreign object foreign object improper seating disassembly improper seating jammed closed jammed open foreign object foreign object improper seating na na na na na loose object loose object pin stud loose object na loose object pin na na na crud buildup loose object stud-gate pin na na mechanical crud buildup loose object stud-gate
Table 1 - Check Valve Failure Data (Page 2 of 2) Failure Mode Component Type 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 BWR-2.VIII.C.p69.33 BWR-2.VIII.C.p70.33 BWR-2.VIII.C.p72.33 BWR-2.XI.A.pl01.430 BWR-2.XI.A.pl01.430 PWR-2.VII.A.p52.172 PWR-2.VII.A.p53.175 PWR-2.VII.A.p104.39 PWR-2.VII.A.p101.39 PWR-2.VIII.B.p13.43 PWR-2.VIII.B.p30.11 PWR-2.VII.B.p32.127 PWR-2.VIII.B.p37.15 PWR-2.VIII.B.p42.18 PWR-2.VIII.B.p43.18 PWR-2.VI.E.p57.199 PWR-2.VI.E.pl 17.378 PWR-2.VI.E.p122.386 PWR-2.VII.A.p73.275 PWR-2.VIII.B.p51.22 PWR-2.VIII.B.p52.23 PWR-2.VIII.B.p72.31 PWR-2.VIII.B.p97.42 PWR-2.VIII.B.p106.4 PWR-2.VIII.B.p114.4 PWR-2.VIII.B.p131.5 PWR-2.VI.E.p171.555 PWR-2.VI.E.p171.555 2 2 2 1 Monticello Hatch 2 Peach Bottom Dresden 2 Dresden 3 Indianan Pt. 2 San Onofre 1 Arkansas One Arkansas One Robinson 2 Palisades Calvert Cliffs Palisades Davis Besse 1 Palisades Beaver Valley Surry 1 North Anna 1 Beaver Valley Cook 2 Calvert Cliffs Palisades Surry 2 Surry 2 Davis-Besse Summer Byron 1 Byron 1 ftc ftc ftc ftc ftc ftc ftc ftc ftc ftc fto fto fto ftc fto ftc ftc 2 na ftc ftc fto fto fte fte ftc fto fto fto swing swing swing swing swing swing tilting swing swing swing swing swing swing swing swing swing swing swing swing na swing swing swing swing swing na swing swing check check check check check check check check check check check check check check check check check check check check check check check check check check improper seating jammed open jammed open disassembly disassembly disassembly improper installation jammed open jammed open foreign object jammed closed improper installation jammed closed jammed open jammed closed foreign object disassembly na improper seating improper seating foreign object jammed closed improper seating jammed open jammed open jammed closed improper installation improper installation stud chemical mechanical stud shaft pin na mechanical mechanical loose object na na chemical chemical chemical loose object pin na na na loose object chemical stud-gate na chemical na na na
Record Event Plant
Failure Tve Failure Cause H U1 1 & 1 1I
Flow Regions
20.0
18.0 16.0 14.0 12.0 Ve
0 10.0 Ct
y
8.0
6.0
4.0
2.0
-"Swinging Free A Tapping A 0 Pegged A -Pegged/Tapping A 0 Tapping/Swinging A A A 00 --I-Jammed
closed
Foreign
object
Disassembly
Improperly
installed
Fig. 7: DISTRIBUTION OF FAILURE TYPES, SWING CHECK VALVE FAIL-TO-OPEN (FTO)
Foreign object Disassembly Improperly installed Jammed open
Fig. 8: FAILURE TYPE DISTRIBUTION, SWING CHECK VALVE
Improper seating
4. Check Valve Analysis
4.1 Failure Mode Identification
A fault tree for check valve failure (FTC) is shown in Figure 9. This tree is developed based on the discussion in Reference 15, the NPE failure data [17], and interviews of Professor P. Griffith and engineering personnel familiar with naval nuclear propulsion systems. The CAND gate, as discussed in Section 2, is a convenient shorthand for situations where infinite combinations of
continuous-valued variables can lead to the top event.
The minimal cut sets (MCS) for the FTC failure mode are given in Table 2. As expected, most of these cut sets are of first order, there being little redundancy within the valve. This is likely to also be the case for most nuclear plant
components.
The quantification of each branch/event in the fault tree of Figure 9 follows along one of two paths. The first path, involving a more or less conventional statistical analysis, is used for events under AND and OR gates. These events, described as being "random" in Section 3, lead to discrete changes to the system,
and are well treated by current analyses. For example, the frequency at which loose objects hold the valve open can be estimated on the basis of the number of events
observed and the length of the period of observation [3].
The second path is used when dealing with events following CAND gates (whose cut set members are denoted by asterisks in Table 2). These events, while having some random characteristics, are largely the outcome of physical processes which can be modeled. An example of such modeling is described in Section 3 and is quantified in Section 4.3.
4.2 Statistical Analysis of MCS Frequencies
If data are available, the parameters of the failure model can be estimated in the same manner as used in current risk studies. Since the amount of available data is usually small, a Bayesian approach is best suited for the analysis [3].
Let A be the parameter to be estimated based on evidence E; Bayes' Theorem states that
rl(A I E) = (EjA) ir0(A) (4.1)
Y
L(EIA) r0(A) dAwhere r, (A
I
E) is the posterior probability density function (pdf) for A, L(EI
A) is the likelihood function, and 7r0(A) is the prior pdf for A. The denominator is simplya normalization factor to ensure that the posterior pdf integrates to unity over all possible values of A.
The prior distribution, w0(A), quantifies the analyst's state of knowledge
concerning the value of A prior to observing evidence E. The prior distribution is commonly used to incorporate "engineering judgment" into the analysis, and plays an important role when the available data are limited. The likelihood function, L(E
I
A), gives the conditional probability of observing E, given that A takes on a certain value. This function can be used to incorporate non-statistical as well as statistical evidence. For example, Reference 3 describes methods to treat expert opinions in a Bayesian analysis.To illustrate the approach, the available data are used to quantify the frequency of valve disassembly, A d. This is the parameter which governs probability of observing any number of disassemblies in a given time period:
(AdT)r eAd
P{r disassemblies in time T} = r! (4.2)
where the conventional assumption that the number of disassemblies is Poisson distributed is used. If the observed evidence consists of the pair of values (r,T), it can be seen from the definition of the likelihood function that the right hand side of
Eq. (4.2) is actually the likelihood function for this particular problem.
For convenience, we assume that the prior distribution can be represented by a "noninformative" form [3,18]:
distribution which treats the analyst's state of knowledge more carefully should be developed, since it will directly influence the results of the analysis.
Using the noninformative prior distribution, it can be shown that Eq. (4.1) results in
T(AdT)r-le dT 1(Adr,T) = (r-1)!
The mean and variance of A d are, respectively,
E[Ad
(4.5) r
Var[A d] T
For the case of the fail to close swing check valve failure mode, Table 1 shows that the data set includes 8 valve disassemblies. Thus, r = 8. However, an
appropriate value of T is more difficult to determine. T represents the total
experience (in valve-years) for swing check valves accumulated over the period 1975 through 1983. To estimate T, we need to know the number of swing check valves in each plant which are similar to the valve being analyzed, and the amount of
relevant experience (plant years) for each plant.
It should be noted that T is an inherently uncertain quantity. Uncertainty arises when deciding which valves are similar to the valve of interest, and when determining the appropriate amount of plant experience (i.e., deciding among
operating years, calendar years, or some other measure). To illustrate the approach, we assume that T is lognormally distributed with a mean value of 71,150
valve-years (obtained by multiplying the number of swing check valves in the safety-related systems of the Seabrook Unit 2 PWR [19] by the total number of
U.S. plant years of operation for the period 1975 through 1983) and a logarithmic standard deviation (aT) of 1.0 (corresponding to a range factor of 5.2).
The final distribution for Ad, given r and a distribution for T, is obtained by recognizing that 7r1(Ad
I
r,T) is a conditional distribution for Ad, given r and T.00
,(A dIr,p(T)) =
{r
d(AdIr,T)p(T)dT (4.6) 0where p(T) is the lognormal distribution for T described above and where l(A dIr,T) is given by Eq. (4.4).
Eq. (4.6) can be evaluated using standard quadrature techniques. The resulting moments of Ad are given in Table 3 and the distribution of Ad is
characterized in Figures 10 and 11. Also shown is the distribution obtained when
UT = 0.001 (i.e., T is essentially a certain quantity). It can be seen that the decrease in aT leads to a small (factor of 1.5) decrease in the mean value of Ad, but a large (factor of 15) decrease in the the variance. Thus, the uncertainty in Ad can be badly underestimated if uncertainties in the data are not properly accounted for.
4.3 Continuous Variable MCS Quantification
To treat minimal cut sets involving continuous variables (events under a CAND gate), a somewhat different approach is required. For example, consider minimal cut set number 1, involving improper seating of the gate. In this case, combinations of wear conditions in the shaft, stud and gate can lead to increased free play and eventual improper seating. The following discussion illustrates the modeling process, using the valve wear model described in Section 3.
Two cases can be considered at this point. First, we notice that any single part in consideration (i.e., the shaft, the stud or the gate) can lead to improper seating independently. For example, wearing in the shaft alone can be responsible for the gate displacement even if the stud and gate have undergone little or no wearing at all. If we limit ourself, initially, to the consideration of this case only
(independent failures), then the CAND gate degenerates into an OR gate and we are left with the study of the probabilities of extreme displacement due to each
component separately. 4.3.1 Independent Failures
b) Estimation of the probability distributions of the random variables identified in (a).
c) Modelling of the deterioration process.
d) Definition of a failure region (domain in which the values of the state variables correspond to excessive wear).
e) Computing the probability integral over the failure region (exactly or with an approximation such as the one described in the appendix). In the case of shaft wear, steps (a) and (c) have been already carried out in Section 3 of this report. Eq. (3.1) describes the wearing process in terms of the rate of shaft material volume removal. In that equation, the average velocity of the fluid is the only random state variable (as long as the maximum and minimum
fluctuation velocities, vmax and vmin, are functions of vave). Then
V - K 1K 2K3 si-1 K2 n-1 K2.7
Vshaft (ave) v e max
where 1 = 37(W - Wa/2) (W - Wa/ 2)bg IC2 KpA K= 0.04 3 r p
Step (b), estimation of the distribution of vave, is straightforward in principle, although the necessary data may not be available. Note that vave is a function of time; what is needed, therefore, is an estimate of time (perhaps expressed in terms of fractions of the operating year) the component is subjected to a characteristic flow rate. Such an estimate might be obtained, for example, by assessing the fraction of time the plant spends in full load, partial load, and no load conditions,
The failure region (step (d)) for this case can be formally defined to be that for which
Vshaft(ave) > Vshaft(vave) (4.8)
where V is the integral over time of Eq. (4.7) and V is a critical value for shaft wear (recall that we are assuming little or no wear for the stud and the gate in this case). This criteria can be recast into the following standard form:
Fshaft(vave) > 0 (4.9)
where
Fshaft(ave) = Vshaft(vave) - Vshaft(vave) (4.10)
Of course, the problem is to determine V . This parameter is a direct
function of the valve design, which establishes nominal clearances, and the assembly tolerances. Therefore, these equations provide the connection between the
measurable, physical characteristics of the valve and the valve reliability (with respect to the particular failure mode being analyzed). As a result, they indicate how changes in design and manufacturing can lead to reliability enhancement or degradation.
It is important to note that assembly tolerance is a random variable, which means that the critical shaft wear, V is also random. This uncertainty is accounted for using standard stress-strain modeling techniques [9].
The remaining step in the analysis is that of computing the probability integral
Pshaft = P[Fshaft(ave) > 0] (4.11)
Following the same approach, similar relations such as Eq. (4.11) can be developed for stud and gate wear. In these latter cases, wear models analogous to
Eq. (4.7) must be developed for both parts. Assuming that such relations can be found, the probability of improper seating assuming independence of failure modes is then
is shaft +Pstud +Pgate (4.12)
(using the rare event approximation). 4.3.2 Dependent Failures
While the three different failure mechanisms do not lead independently to overall component failure, the procedure used in the previous discussion is also applicable to the more realistic situation of dependent mechanisms. In this latter case, a failure condition defined in terms of the three wear variables must be defined, and a joint probability distribution for the variables assessed:
is = P{Fis(Vshaft,Vstud,Vgate) > 0} (4.13)
Notice that Fis degenerates into Fshaft when Vstud = Vgate = 0, and similarly for F stud and Fgate'
This example for treating continuous variables has been aimed at the "Improper Seating" failure mode. Examination of the "Mechanical Jamming"
failure mode (MCS 5) shows that shaft, stud, and gate wear also apply, although the failure function Fmj may be very different. Note also that the interference term between the two MCSs (which are essentially connected by an OR gate) may not be negligible.
4.3.3 Quantification
As an example of the actual computation of the failure probability associated to a CAND-gate, we analyze the improper seating failure mode for the swing check valve. The purpose of this analysis is to illustrate in detail the computational procedure. Thus, arbitrary values are used for the limited number of parameters for
It is assumed that the gate seats improperly when its vertical displacement due to wear at the hinge and at the stud-gate connection, exceeds the actual tolerance which results from the design tolerance and potential construction errors. It is assumed that the valve is maintained and brought back to initial conditions every year. The probability of failure (for improper seating) is then defined as the probability that the valve seats improperly in any given year of operation between two consecutive inspections.
Hinge Wear. The wear at the hinge is assumed to be governed by the model described by Eq. (4.7). Typical values for the material and geometrical parameters of a 10 inch diameter valve are given in Table 4. For this analysis, it is assumed that the average flow velocity, vave, takes on the nominal value during reactor operation, and is zero when the reactor is not operating. During operation, therefore, the nominal rate of material removal is
V
= 0.27 inch3/year.The area of the cross-section of the hinge pin which is removed can be computed by dividing the total volume of material removed from the hinge (V -to) by the length of the pin (2- rP), where to is the time of actual operation during the year of observation. Assuming that the vertical drop dh is proportional to the square root of the area removed from the circular cross-section:
dh Vt (4.14)
dh =P 2 P
where for the sake of illustration the constant p1 is assumed to have a value of 3.4. The uncertainty associated to the expression for
V
is described by assuming a normal distribution with mean equal to the nominal value just found (0.27 in3/yr),and standard deviation representing a nominal variability of ±10% about the mean
increasing free play between the stud and gate, leading to increasing wear of the two parts. Let t be the operating time when the cotter pin fails. If t > to, no drop due to this wear mechanism is assumed to take place. If t < to, the drop due to arm-stud wear, da, is assumed to be a quadratic function of the time of operation after the cotter pin breakage:
* 2 *
da P2(to -t ) if t <to (4.15)
0 otherwi s e
For purposes of illustration, let p2 = 3.3 .
The time of cotter pin failure, and the time of actual operation are random variables which we assume to be normally distributed with means and standard deviations as follows:
t N(jp = 0.90, a = 0.03) years to N(p = 0.85, a = 0.03) years
The mean of to is obtained from data on nuclear power plants down time; the mean time to cotter pin failure is assumed for the purpose of illustration.
*
Tolerance. The actual tolerance, or permissible vertical drop of the gate, d is given by the sum of a design tolerance p3 , and a construction error c:
*
d =p 3 + (4.16)
where a typical value for p3 is 0.787 inch and E is assumed to be normally distributed:
g(x) = p3 + x4 -pl(x3x1/10)1/2 ~p2(x1 )2 (417)
and the corresponding failure condition:
g(x) < 0 (4.18)
The state variables (x) are:
x1 =to * x2 =t x3 V x =(
x4-Results. Once the state equation is developed, the failure probability can be determined as
Pf = P{g(x) < 0} (4.19)
In this analysis, the First Order Reliability Method (FORM), described in the Appendix, is applied. The computer code used which employs this method (also called FORM) is described in Reference 7. Alternative approaches for solution include using exact distributions, moment methods, or Monte-Carlo methods.
The result obtained using FORM is that Pf = 6.6 x 10 . This is the probability (for a year of operation) that the check valve will fail to close due to improper seating of the gate. Again, although this number is lower than the valve disassembly result obtained earlier, it should not be viewed as a serious estimate, since arbitrary values were assigned to the parameters p1 and p2, and since the failure model for arm/gate wear, while plausible, is not based on any rigorous derivation. The calculation does indicate what types of input are needed to
modifying each of the model constants, pi, and the distribution constants (p,-) individually. Variations are set at ± 10% of the nominal (base case) value.
The analysis identifies two parameters of importance: the mean of x2 and p3.
In both of these cases, the computed value of Pf is comparable to the valve disassembly failure rate. Thus, while the base case value of Pf indicates that improper seating is not a significant contributor to the total failure probability of the valve, the sensitivity study results show that small variations in parameters can
change this result. This shows the importance of the treatment of uncertainties; a realistic analysis should spend significant resources in characterizing the
uncertainties in models and model parameters, as well as on obtaining reasonable nominal estimates for the model parameters.
Validation of First Order Analysis Results. FORM is a very efficient technique to obtain approximate solutions, but it is important to assess the accuracy of its results. Some work has been done in this respect, and according to Reference 7 the probability estimate can be insufficiently accurate in
high-dimensional problems (for example with more than thirty random variables). In this case, it is suggested that the solution be checked using the Second Order Reliability Method (see Reference 20). Other numerical problems can occur when one variable dominates the failure (or survival) probability and this probability is very small (or very large). However, it is reasonable to assume that the calculated results are accurate to the first order in the range of 104 < Pf 5 1 - 10.
For the improper seating problem treated in this analysis, the solution of FORM has been check by repeating the last sensitivity listed in Table 5 using a standard Monte Carlo simulation. The result of this test is that the FORM value is within 4% of the Monte Carlo result, and is therefore quite acceptable for our
(*)
(*)
Table 2 - Minimal Cut Sets for Swing Check Valve (Fail to Close)
1. CAND( Worn Shaft - Worn Stud - Worn Gate) leading to improper seating
2. Loose Object Obstruction 3. Buildup Obstruction 4. Backward Installation
5. CAND( Worn Shaft - Worn Stud - Worn Gate) leading to mechanical jamming
6. Shaft Corrosion
7. Hole in Valve (corrosion) 8. Shaft Broken
9. Arm Broken 10. Stud Broken 11. Gate Broken
*
Table 3 - Characteristic Parameters for r1(Ad
I
E) Parameter aT = 1.0 1.6 x 104/yr 2.8 x 10 /yr2 E[Ad] Var[Ad] aT = 0.001 1.1 x 104/yr 1.9 x 10-9/yr2Table 4 - Typical Values for Check Valve Wear Model Parameters Parameter Value KI 5 X 10-3 (dimensionless) P 18.000 psi F 7.47 lb W 13 lb Wa 6.5 lb b .88 (dimensionless) g 384 inch/sec2 p 0.036 lb/inch2 A 78 inch2 Vave 7.4 inch/sec K 28 (dimensionless) sin 0ave 0.766 'eddy 0.0592 sec-1 0 . 200 min 0max 800 Al 0.124 inch/sec
Table 5 - Sensitivity Analysis Results Parameter m x1 ax m x 2 Nominal Value .85 .03 .90 .03 Variation +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% +10% -10% Failure Probability .99-5 .35-4 .58-6 .77-6 .20-5 .17-3 .56-6 .84-6 .47-5 .88-7 .42-6 .21-5 .27-5 .11-6 .58-4 .37-8 .77-6 .52-6 .50-9 .26-3 .27 x 2 mx 3 x 3 x4 .03 .0472 p1 3.4 3.3 .787 p3
La)
4:-5. Concluding Remarks
This report investigates the modeling of component reliability, a necessary step when reliability goals are specified for a system design. Using swing check valves as an example, it is shown that a wide variety of failure modes are possible, some of which involve continuous component degradation and are not amenable to
standard statistically-based reliability analysis. Physical models for component behavior are required to handle these latter failure modes.
The report shows how the two types of failure analyses can be integrated into a reliability analysis and presents a limited quantification of some of the factors in the check valve failure model. An analysis is performed for a discrete failure mode (valve disassembly) for which the failure data are uncertain. A Bayesian approach is used to estimate the frequency of this mode. The likelihood that the valve seats improperly due to continual wear of component parts is treated by developing a model for part wearing and displacement and quantifying this model using First Order Reliability Method (FORM) analysis.
While values for a limited number of the model parameters are selected arbitrarily, the analysis is useful in that not only does it demonstrate the procedure and tools needed to obtain results, it also shows how the importance of different model parameters (e.g., the value of the design tolerance) can be determined. This importance is measured in terms of nominal contribution to unreliability, and in terms of the sensitivity of the component reliability to uncertainties in the
parameter values. Thus, the analysis procedure can be used to determine if a part in a component should be improved, if additional data characterizing the part should be gathered, or both.
While the methodology has been applied to a swing check valve for
demonstration purposes, it is clearly not limited to such simple cases, nor even to existing components. Consider, for example, the shutdown rod assemblies for the secondary self-actuated shutdown system described in Reference 21. Based on the proposed assembly design and operating/maintenance procedures, a fault tree can be constructed to identify postential failure modes. This fault tree can incorporate continuous as well as discrete variables. Quantification of the fault tree gates can be accomplished by conventional methods, in the case of discrete variables, and by
simulation models may be needed to quantify the discrete event failure modes. As in the case of the swing check valve example, the analysis would:
- provide a basis for rigorous reliability estimates in the case of strongly interdependent variables even in absence of failure data, and
- determine relative importance of the model parameters and therefore indicate which ones need to be investigated with additional experimental and/or analytical methods.
Of course, to perform the analysis, models for the degradation failure modes are needed, as well as documentation concerning system design, operation, testing, and maintenance. For many components, a significant effort may be required to develop these models. An additional potential problem is that there may be
interactions between the failure processes characterized by discrete events and those characterized by gradual degradation; methods to treat this situation have not been developed in this report, and require additional investigation.
6. References
1) U.S. Nuclear Regulatory Commission, "Reactor Safety Study: An Assessment of Accidental Risks in U.S. Commercial Nuclear Power Plants," WASH-1400, NUREG-75/014, October 1975.
2) American Nuclear Society and IEEE, "PRA Procedures Guide - A Guide to the Performance of Probabilistic Risk Assessments for Nuclear Power Plants," U.S. Nuclear Regulatory Commission, NUREG/CR-2300, April, 1983.
3) G. Apostolakis, "Bayesian Methods in Risk Assessment," Advances in Nuclear Science and Technology, 13, 415-65 (1981).
4) K.N. Fleming, "A Reliability Model for Common Mode Failure in Redundant Safety Systems," Proceedings of the Sixth Annual Conference on Modeling and Simulation, Pittsburgh, April 1975.
5) J.A. Hartung, H.W. Ho, P.D. Rutherford, and E.U. Vaughan, "The Statistical Correlation Model For Common Cause Failure," Proceedings of the Annual Conference of the Society for Risk Analysis, August 1-3, 1983.
6) A. Mosleh and N. Siu, "A Multi-Parameter, Event-Based Common-Cause Failure Model," Paper M7/3, Proceedings of the Ninth International Conference on Structural Mechanics in Reactor Technology, Lausanne, Switzerland, August 1987.
7) S. Gollwitzer, F. Guers, and R. Rackwitz, FORM (First Order Reliability Method) Manual. Nymphenburger Str. 134, 8000 Munchen 19, West Germany, 1987.
8) U.S. Nuclear Regulatory Commission, "Loss of Power and Water Hammer Event at San Onofre, Unit 1, on November 21, 1985," NUREG-1190, January 1986.
9) M.L. Shooman, Probabilistic Reliability: An Engineering Approach, McGraw-Hill, New York, 1968.
10) M. Hohenbichler, et al., "New Light on First- and Second-Order Reliability Methods," Structural Safety, 1, (1987).
11) G.I. Schueller, "A Critical Appraisal of Methods to Determine Failure Probabilities," Structural Safety, 1, (1987).
12) M. Hohenbichler and R. Rackwitz, "First-Order Concept in System Reliability," Structural Safety, 1, (1983).
13) M. Shinozuka, "Basic Analysis of Structural Safety," Journal of the Structural Division of ASCE, 109, (1983).
15) P. Griffith, "Check Valve Inspection and Redesign," Proposal to Northeast Utilities, 1987.
16) J. Snopkowski and P. Griffith, Letter to C. Nalezney, EG&G Idaho, NRC Public Document Room, April 1, 1986.
17) S.M. Stoller, Nuclear Power Experience, updated monthly.
18) R.L. Winkler and W.L. Hays, Statistics, 2nd d., Holt, Rinehart, and Winston, 1975.
19) Pickard, Lowe and Garrick, Inc., "Seabrook Station Probabilistic Safety
Assessment," prepared for the Public Service Company of New Hampshire and the Yankee Atomic Electric Company, PLG-0300, December 1983.
20) S. Gollwitzer, F. Guers, and R. Rackwitz, SORM (Second Order Reliability Method) Manual. Nymphenburger Str. 134, 8000 Munchen 19, West
Germany, 1987.
21) Rockwell International, "Sodium Advanced Fast Reactor Preliminary Safety Information Document," AI-DOE-13527, Revision 7, prepared for the U.S. Department of Energy, September 1986.
Appendix - An Overview of First Order Reliability Analysis In this appendix, the first order reliability analysis method is briefly described. Additional details are provided in Reference 7 and References 10-14. Problem Formulation
The state of the system is described by a set of known and uncertain parameters. All the uncertain quantities are listed in a time-invariant n-dimensional random vector x.
A limit state is defined (e.g. excessive deformation, excessive stress, cracking, etc.) such that if the system is in that state, than the system is considered to have failed; otherwise the system is said to survive.
X2
RF
:. :::.... (failure)
S
(survival)
We are interested in the probability Pf that the system fails.
If the
joint
cumulative distribution function (CDF) P . is known, than the problem of computing Pf is called a full distribution (FD) reliability problem.If only the mean and standard deviation of x are available then Pf is not uniquely defined and one has to be satisfied with other measures of the system reliability, the so called reliability indices. This last problem is referred to as second moment (SM) reliability analysis.
The limit state allows the partition of the space of x into two parts: a safe region, R5, which is the collection of all points for which the system survives, and a
Pf = P{x belongs to RF1 = 1 - P{ belongs to Rs} = 1- dP (x)
S
In cases where x has a high dimension, the computation of this integral is usually impractical. Approximate procedures have been developed for such cases. First Order Analysis
Two factors play an important role on the computation of Pf: the type of failure condition and the type of CDF. First order analysis takes advantage of the fact that if the x has a multivariate normal distribution, and if the failure condition is linear, then Pf can be easily obtained.
A linear failure condition is one for which survival depends on x only through a linear function
y = a + TX (A.1)
where the condition is of the type
*
y > y
For example, let x1 be a random normal load, x2 a random normal resistance and x1 > x2 the failure condition. We can define y as y = (x1 - x2). Then, if mi is the mean value of xi, o1 its standard deviation, and p is the correlation coefficient between x1 and x2'
y N(myo ) (y is normally distributed) y~ =
X 2
9xl
The probability of failure is given by 1 2 1 -Pf = e dz where m - m2 y
The parameter
#
can be seen as the minimum of the standardized distance of the mean of x from the boundary.If x is normal but the failure condition is not linear of the type
*
y = g(x) > y
one can still use, as an approximation, the procedure shown in the previous example after having linearized the boundary B with a plane tangent to B at a point x This is the basis of the first order method.
Best results are obtained by selecting the linearization point as the one for which the likelihood of failure is maximized. The determination of this point, called
:: p-point
If x is normal but not standardized, one has to minimise the so called Mahalanobis distance which is defined as
1 [~~)=(x - rn)T -1 -n)2 where is the covariance matrix for x.
If x is not normal, it can be transformed to normality with a standard procedure such as the Rosenblatt transformation. If the failure condition in the normal space happens to be linear then we can directly use the procedure of the previous example; otherwise we can linearize it at the /3-point, as explained above, and then proceed as in the example.
The process of transforming x to the normal space can be computationally very demanding. A more efficient strategy has been developed in which x is not transformed to normality, but rather approximated to a normal distribution. This procedure of "normal tail approximation", is known as the Rackwitz-Fiessler algorithm; it can greatly increase the efficiency of first order reliability analysis.
![Figure 1: A typical swing check valve [8]](https://thumb-eu.123doks.com/thumbv2/123doknet/14103319.465851/13.918.200.646.105.562/figure-typical-swing-check-valve.webp)