A unified approach for different tasks on rings in robot-based computing systems
Texte intégral
Figure








Documents relatifs
To explore this pos- sibility, EBSD patterns of a selected grain were measured while milling at different currents (the pattern acquisition parameters were exactly the same as
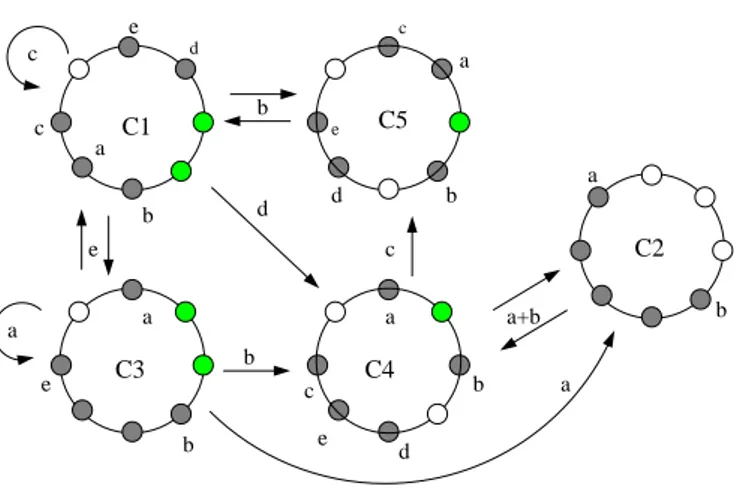
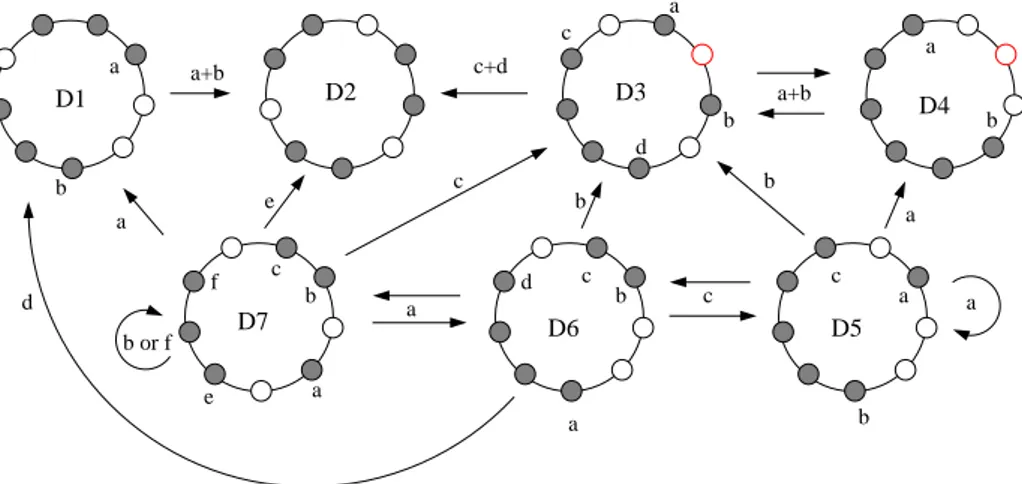
As for the protocol with 3 robots, the algorithm works into two phases: the first phase is to perpetually explore the ring and the first phase is to reach a legitimate
This paper is organized as follows: Section 2 states the problem; Section 3 presents our Distributed Algebraic Connectivity estimation method and discusses its ben- efits; Section
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
In order to allow constraint solvers to handle GIPs in a global way so that they can solve them e ciently without loosing CP's exibility, we have in- troduced in [1] a
In order to reach these objectives which had been quite specific for them for a long time (constitution of lemmatized alphabetical indexes, study of
40 The majority of teachers agree on the idea that the material chosen according to learning styles facilitates teaching intercultural communicative competence,
Une dernière pièce, sur fragment épais d’os de mammouth, est de morphologie très irrégulière (fig. Le support semble correspondre à un fragment de
