Competitive physics : teaching fundamental principles through design
Texte intégral
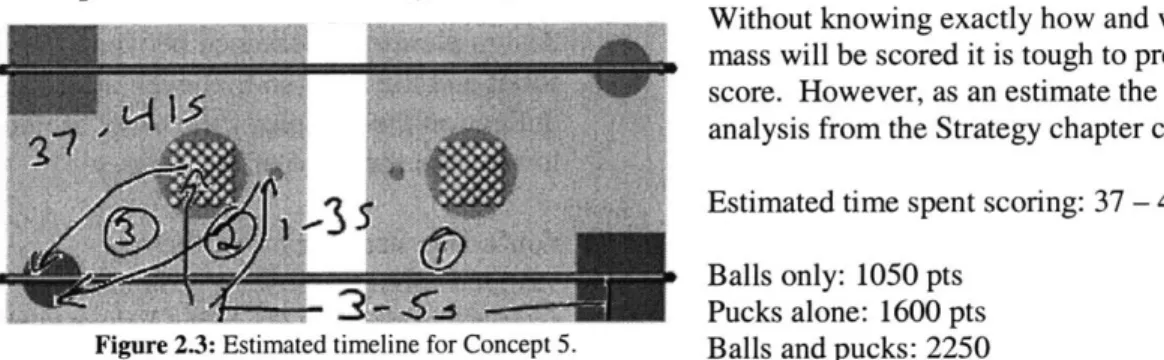
Figure
Documents relatifs
Le problème du choix de la combinaison linéaire des variables explicatives est similaire à tous ce qui a été vu dans le modèle linéaire :. Utilisation d’indicatrices pour
This paper studies the optimal scoring of multiple choice tests in which the marks for wrong selection and omission jointly minimize the mean square dierence between score
Such concepts have recently been explored in Social Choice theory, and a menu of voting rule is said to be stable if it contains at least one self-selective voting rule at each
Recommendations from the SmartCow consortium 2 / 6.. Preparing for data collection: The data collection should be planned in advance, based on the particular purpose of the study,
Borda (1784) showed that for a given voting rule, the Plurality rule can elect the Condorcet loser, a candidate who loses all his pairwise comparisons. The Borda-Condorcet debate
In the sequel we assume that only the four preference types in Table 5 are observ- able. Note that when candidate a wins in a voting situation, only voters of type 4 and..
= probabilisation de caractéristiques de cibles pour : - sélectionner les meilleurs clients ou prospects.. - optimiser le rendement d’une opération de
Pour la Fréquence, le paramètre peut quantifier le nombre de contacts au cours de l’année en cours : 10 pour plus de 10 contacts, jusqu’à 1 pour moins d’un contact sur les
