Réalisation et commande d’un Robot
détecteur d’obstacle
يلاعلا ميلعتلاو يملعلا تحبلا ةرازو
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique
مناغتسم سيداب نب ديمحلا دبع ةعماج
Université Abdelhamid Ibn Badis de Mostaganem
ايجولونكتلاو مولعلا ةيلك
Faculté des Sciences et de la Technologie Département de génie des électronique
N° d’ordre : M
…………/GE/2019
MEMOIRE
Présenté pour obtenir le diplôme de
MASTER EN GENIE ELECTONIQUE
Option :
Electronique des Systèmes Embarqués
Par :
EBATA-ATIPO Hugor
BENTOUNSI Mohamed
Soutenu le 08 / 07 / 2019 devant le jury composé de :
Président : Mr BENOUALI.A MAA UMAB- Mostaganem
Examinateur 1: Mr BENAOUALI.M MAA UMAB- Mostaganem
Examinateur 2 : Mme BENCHELLAL.A MCB UMAB- Mostaganem
Encadreur : Mme BECHIRI.F MCB UMAB- Mostaganem
i
Dédicaces
Je dédie ce Travail à mes parents un signe de reconnaissance pour tout ce qu’ils ont consenti, des efforts rien que pour me voir réussir, et voilà l’occasion est venue.
A ceux qui m’ont donné la vie, symbole de bonté, de fierté, de sagesse et de patience. A ceux qui sont la source de mon inspiration et de mon courage, à qui je dois de l’amour et de la reconnaissance,
A mes parents.
A mes frères et sœurs je vous réserve une place dans mon cœur et dans mes pensées. A toutes ma famille, mes ami(es) et mes ami(es) de la promotion et tous ceux qui ont contribués à ma réussite.
ii
Remerciements
Nous tenons à remercier au premier lieu le Dieu tout puissant de nous avoir accordé la force et le courage de mener ce travail à terme.
Nous tenons à adresser nos sincères remerciements à notre encadreur pour le thème, Mme F. BECHIRI de l’Université ABDELHAMID IBN BADIS pour sa disponibilité, pour sa lecture, suggestion et remarques et surtout pour sa confiance sans limite mise en nous tout au long de ce projet.
Nous vous pris de bien vouloir agréer le témoignage de notre plus vive reconnaissance et notre profond respect.
Nous présentons également nos sincères remerciements à toute l’equipe pédagogique du département génie électrique de l’université de Mostaganem, une équipe efficace qui nous appris énormément de choses ces cinq(05) dernières années
Nous remercions particulièrement nos familles pour leurs soutiens moraux Pour ce travail, merci de nous avoir encouragés, et cru en nous.
Nous remercions également nos ami(es), nos collègues de classe, qui nous ont encouragés tout au long de ce projet et nous ont beaucoup aidés.
Enfin, nos remerciements aux membres de jury qui ont fait l’honneur d’accepter de juger ce modeste travail.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 1
T
able des matières
Dédicace ...i
Remerciements ...ii
Table des matières ...1
Table des figures ...3
Introduction générale ...6
Chapitre I : Rappel sur les systèmes embarqués ...7
I.1 : Introduction ...8
I.2 : Définition d’un système embarqué ...8
I.3 : Caractéristiques principales d’un système embarqué ...8
I.4 : Les étapes de réalisation d’un système embarqué ...9
I.5 : Conclusion ...9
Chapitre II : Etude théorique du projet ...10
II.1 : Introduction ...11
II.2 : Cahier des charges du projet ...11
II.3 : Schéma synoptique du projet ...12
II.4 : Le matériel utilisé dans le projet ...13
II.4.1 : Une carte Arduino Uno : ………...13
II.4.2 : un servomoteur ...14
II.4.3 : un capteur ultrason ...15
II.4.4 : moteur à courant continu DC...18
II.4.5 : le circuit intégré L298N...20
II.4.6: un module Bluetooth………21
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 2
II.4.8: Régulateur de charge……….23
II.4.9: Batterie 12v………24
II.5 : Conclusion ...25
Chapitre III : Description du Robot ...26
III.1: Définition du Robot……...27
III.2: Schéma synoptique du Robot……...27
III.3: Types du Robot……...28
III.4: Application du Robot mobile……...29
III.5: Application Industrielle……...29
III.6: Types de marche du Robot……...31
Chapitre IV : Réalisation pratique du Robot………..33
IV.1 : Introduction ...34
IV.2 : Schéma électronique du projet ...34
IV.3 : logiciel………35
IV.3.1 : La conception du logiciel sous l’environnement Arduino ...36
IV.3.2 : Fonctionnalités du logiciel ... 37
IV.3.3 : Organigramme de haut niveau du logiciel ...39
IV.4 : Montage complet du robot………43
IV.5 : Conclusion ...45
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 3
Annexes ...47
Annexe1 :Microcontrôleurs……….47
Annexe 1.1 : Définition d’un microcontrôleur ... 47
Annexe 1.2 : Généralités ... 47
Annexe 1.3 : Architecture interne de base d’un système à processeur ... 49
Annexe 1.4 : Langages de programmation des microcontrôleurs ... 49
Annexe 1.5 : Quelques critères du choix d’un microcontrôleur ... 51
Annexe 2 : L’Arduino ... 52
Annexe 2.1 : Qu’est-ce que l’Arduino ? ... 52
Annexe 2.2 : La carte Arduino ... 52
Annexe 2.3 : Le logiciel Arduino ... 54
Bibliographie et sites internet... 57
Table des figures
Figure I.1 : Etapes de réalisation d’un système embarqué………..9Figure II.1 : Schéma synoptique du projet ………...12
Figure II.2 : estimation du coût du projet………...13
Figure II.3 : Un servomoteur ………...14
Figure II.4.1 : Emission et Réception des obstacles………..15
Figure II.4.2 : Transformations des ondes….………..16
Figure II.4.3 : Diagramme des obstacles ……….………...17
Figure II.4.4: Capteur ultrason...18
Figure II.5.1 : Relations entre les Vitesses………...18
Figure II.5.2: Moteur à courant continu DC ...19
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 4
Figure II.6 : Le circuit intégré L298N………...21
Figure II.7 : Un module Bluetooth...22
Figure II.8: Panneaux solaire...23
Figure II.9 : Régulateur de charge...24
Figure II.10 : Batterie 12v...24
Figure III.1 : Schéma synoptique d’un robot...27
Figure III. 2 Robot d’exploration………..………...29
Figure III.3 :Robot militaire……..………...29
Figur III.4 : véhicule Autoguide………..……..………...30
Figure III.5 :Robot aspirateur…….………...30
FigureIV.1 : simulation avec le logiciel proteus………34
Figure IV.2: Schéma électronique du projet ...35
Figure IV.3: Partie déclaration dans le programme ...36
Figure IV.4: Fonction « setup ( ) » du programme ...37
Figure IV.5: Fonction « loop ( ) » du programme ...38
Figure IV.6: Schéma bloc……...
39
Figure IV.7 : Organigramme du haut niveau du logiciel………..………..…..42
Figure IV.8 : Montage final du robot sans les panneaux solaires ………..…..44
Figure IV.9 : Montage final du robot avec les panneaux solaires …….…..………..…..45
Figure A.4 : La carte Arduino Uno...
49
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 5
Abstract
Robotiser is a term that has become more and more interesting due to its importance in all fields, precisely in the field of electronics and power electronics; on the other hand, it is an imperative need for the realization of
several of spots that are difficult for a human being, or the same, that requires routine when they are done.It is of such an advantage in terms of quality, accuracy and speed that the use of this technique ensures a complete integration to the field of work, either to carry out instructions at the requested time, or to exchange information, and all this surely passes in an inevitably flexible way.
The flagship of technological progress, robots are today present in all sectors (industry, administration, our own apartment). The various treatments they allow to achieve will lead to the improvement of our daily needs.
The major interest of this project is attributed to the search for a solution simplifying the mobility of the robot avoiding any obstacle; with a programmable circuit at a reduced price, to try to avoid any waste of electricity.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 6
Introduction générale
La robotique permet d'aider l'homme dans les tâches difficiles, répétitives ou Pénibles. de plus elle constitue le rêve de substituer la machine à l'homme dans ces tâches.
Les facultés de perception et de raisonnement des robots progressent chaque jour actuellement et plus encore dans l'avenir, ils sont appelés à jouer un rôle de plus en plus
Important dans notre vie.
La robotique comporte deux grands pôles d'intérêt: la robotique de manipulation (robotique industrielle) et la robotique mobile. Un des problèmes majeurs de la robotique mobile est la planification de mouvement. Autour de ce problème de planification demouvement de nombreuses études ont été réalisées dans le but de développer desméthodes générale pour guider les robots.. Le robot aura un capteur de distance devant lui pour éviter les obstacles, les quatre moteurs DC et les différents capteurs sont pilotés à l’aide d’une carte Arduino Uno. Le mode manuel définit un robot commandé par un Bluetooth via une application Android (App_robot) et la programmation se fera en langage Arduino qui ressemble au C++. En effet, notre projet consiste à la réalisation et commande d’un robot détecteur d’obstacle. Ce Robot change de direction en présence d’un obstacle détecté par le capteur ultrason. Nous verrons tous les détails de ce projet dans les différents chapitres qui suivent. Ce Robot n’étant ni plus ni moins qu’un système embarque. Après l’introduction générale, nous ferons un rappel sur les systèmes embarqués en premier chapitre. Le second chapitre sera consacré à une étude théorique du projet et dans le troisième chapitre, nous ferons la réalisation pratique du système pour terminer avec les tests finaux et la validation et nous terminerons par une conclusion générale.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 7
CHAPITRE I
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 8
I.1 : Introduction
Nous donnons dans ce chapitre un petit rappel sur les systèmes embarqués. Ces systèmes électroniques utilisent les composants électroniques classiques et les composants à processeur autrement dit les composants analogiques et les composants numériques. Les systèmes embarqués sont présents dans notre vie quotidienne et y jouent un rôle important. Grâce à ses systèmes, nous communiquions à distance, nous nous déplaçons plus rapidement, nous avons plus de sécurité et de confort dans nos maisons, etc.…
I.2 : Définitions d’un système embarqué
Un système embarqué est un système électronique et informatique qui est spécialisé dans une tâche bien précise. C’est un système électronique et informatique particulier, conçu pour effectuer des tâches spécifiques avec des ressources limitées et des contraintes variées (consommation d’énergie, espace mémoire restreint, etc.).
Un système embarqué est aussi défini comme étant un composant électronique issu de la combinaison de matériel et de logiciel et qui interagit avec son environnement. Ces systèmes sont dit embarqués, parce qu’ils sont toujours intégrés dans des systèmes beaucoup plus larges pour y jouer un rôle bien spécifique. Notons qu’avant l’arrivée des microprocesseurs, ces systèmes étaient tout simplement appelés systèmes électroniques et ils étaient constitués de différents composants classiques reliés entre eux par des liaisons point à point. La composante logicielle n’existait pas.
I.3 : Caractéristiques principales d’un système embarqué
Les principales caractéristiques d’un système embarqué sont : C’est un système principalement numérique.
Il dispose des ressources limitées surtout les mémoires. Il peut être autonome ou non.
Il est constitué de logiciel et de matériel.
Il ne possède généralement pas d’entrées/sorties standards tels qu’un port série RS232, USB, etc. ni de périphériques classiques comme un clavier d’ordinateur mais plutôt des
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 9 périphériques limitées telles que des boutons poussoirs, des claviers matricielles, des LED, des écrans LCD, etc.
Il peut être ou non ouvert au monde extérieure pour des mises a jour ou pour communiquer.
Exemple :
un distributeur de billet
un robot
une carte à puce
les systèmes de contrôle d’un avion
I.4 : Les
étapes de réalisation d’un système embarquéLa réalisation d’un système embarqué, quel que soit sa génération, obéit à un certain nombre d’étapes présentées dans l’organigramme ci-dessous :
Figure I.1 : Etapes de réalisation d’un système embarqué
I.5 : Conclusion
Dans ce chapitre, nous avons décrit de façon brève les systèmes embarqués. Nous avons vu ce qu’est un système embarqué, ses caractéristiques principales et les étapes de conception d’un système embarqué.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 10
CHAPITRE II
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 11
Description des composants utilisés
II.1 : Introduction
Dans ce chapitre nous allons faire une étude théorique de notre projet la réalisation et commande d’u robot détecteur d’obstacle .Ce Robotn’est qu’un système embarqué, nous allons donc suivre naturellement les étapes de conception d’un système embarqué que nous avons déjà évoqué dans le premier chapitre. Nous allons débuter par la rédaction du cahier des charges du projet, ensuite nous verrons les spécifications matérielles et logicielles, et dans le chapitre suivant nous entamerons la réalisation pratique.
II.2 Cahier de charges du projet
Le cahier de charges d’un projet est une description complète du projet dans le langage naturel (non technique) compréhensible par toute personne ingénieur ou non ingénieur. Dans ce cahier, le client fait ressortir l’ensemble des contraintes que doit respecter son produit : l’encombrement, le temps réel, la consommation, le coût, etc.…
Le cahier de charge de notre Robot détecteur d’obstacle est le suivant :Le panneau solaire capte l’énergie envoyée par le soleil vers la terre et la converti en courant électrique continu. Cette énergie sera transmise au régulateur de charge pour charger la batterie et de limiter sa charge. La batterie 12V va transmettre en suite cette énergie reçue au driver moteur pour alimenter les moteurs. Le robot étant en mouvement quant il détecte l’obstacle, il prend une autre direction automatiquement. Le servomoteur qui est un moteur à courant continue va piloter un draver qui va régler constamment sa positon, on parle dans ce cas du système asservi, En utilisant le réducteur qui va augmenter le couple des moteurs. Le capteur ultrason permet de mesurer la distance, l’émetteur envoie une série d’impulsion
sonore à 40khz une
fréquence inaudible pour l’oreille humaine et en rencontrant l’obstacle le signal revient sous forme d’un écho au récepteur
.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 12
II.3 : Schéma synoptique du projet
Le schéma synoptique du projet est présenté comme suit :
Figure II.1 : Schéma synoptique du projet
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 13 A partir de ce schéma synoptique, on peut réaliser notre projet et estimer également son coût comme le montre le tableau
9 _ Batterie 12V 1800DA
8 _ Régulateur de charge 3000DA
7 _ 2 panneaux solaires 2400DA
2 _ Capteur ultrason 500DA
1 _ Les moteurs et les roues 5200DA Capteurs suiveur de ligne 1500DA
3 _ Bluetooth 1200DA
Plaque d’essai 450DA
6 _ Carte arduino Uno 6500DA
4 _ Servomoteur 700DA
5 _ Circuit l298N 1000DA
Support des batteries 450DA
Pile 300DA
TOTAL
29500DA
Figure II.2 : Estimation du coût du projet
II.4 : Matériel utilisé dans le projet
II.4.1 : Une carte Arduino Uno
Dans tout système embarqué, il existe au moins un composant intégrant une unité de traitement d’informations (le processeur), c’est le (ou ce sont les) cerveau(x) du système
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 14 embarqué. Il existe plusieurs types de composants utilisés pour cette fonction parmi lesquels nous avons les microcontrôleurs, les microprocesseurs, les cartes à microprocesseurs ou à microcontrôleurs dont les plus populaires sont celles à base d’Arduino. Mais, il en existe d’autres comme Raspberry Pi, Pcduino, le launchpad MSP430 etc…
Dans ce projet, nous avons utilisé l’une de ces cartes à microcontrôleur à savoir l’Arduino, plus précisément la carte Arduino Uno (plus de détails sur la carte dans « Annexe 2.2 »). Ce choix est motivé par plusieurs raisons surtout le nombre d’entrées sorties de la carte, l’espace mémoire, mais aussi par la facilité d’utilisation d’Arduino que ce soit dans le câblage ou la programmation, et les différents guides disponibles sur le site officiel de l’Arduino (www.arduino.cc) (Arduino est open source).
II.4.2 : Servomoteur
Un servomoteur, son nom vient du latin « servus » qui signifie esclave. Mais avant de s’atteler de son exploration interne, nous allons avant tout voir à quoi il sert. Les fils, qui sont au nombre de trois (nous y reviendrons)
L’axe de rotation sur lequel est monté un accessoire en plastique ou en métal Le boitier qui le protège … mais aussi de plusieurs éléments que l’on ne voit pas
Un moteur à courant continu des engrenages pour former un réducteur (en plastique ou en métal) un capteur de position de l’angle d’orientation de l’axe (un potentiomètre bien souvent). Une carte électronique pour le contrôle de la position de l’axe et le pilotage du moteur à courant continu[7] .Voilà une image 3D de vue de l’extérieur et de l’intérieur d’un servomoteur. Le servomoteur a besoin de trois fils de connexion pour fonctionner. Deux fils servent àson alimentation, le dernier étant celui qui reçoit le signal de commande :rouge: pour l’alimentation positive (4.5V à 6V en général)noire marron: pour la masse (0V)orange, jaune, blanc, … : entrée du signal de commande
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 15
II.4.3 : Capteur ultrason
Les capteurs ultrasonores utilisent des ondes de fréquence non perceptible par l’oreille humaine, généralement dans la fourchette 20Khz-200khz. De la même manière que les télémètres laser, ils sont bases sur le principe de la mesure du temps aller-retour los de la réflexion sur un obstacle. C’est la méthode employée
par certains animaux pour
percevoir leur environnement, comme les chauves-sous ou les dauphins l’écholocalisation.Un avantage de ces capteurs est que contrairement aux télémètres, l’onde qu’ils émettent n’étant pas focalisée, ils perçoivent beaucoup plus facilement des éléments filiformes comme des pieds de chaises ou des grillages.par contre leur portée est faible, et il ils sont moins adaptes aux milieux de propagations non [8] isotropes comme l’air.
Le capteur HC-SR04 utilise les ultrasons pour déterminer a distance d’un objet.il offre une excellente plage de détection sans contact, avec des mesures de haute précision et stables.son fonctionnement n’est pas influencé par la lumière du soleil ou des matériaux sombres, bien que des matériaux comme des vêtements puissent être difficiles a détecter.
1-Principes de fonctionnement des ultrasons
Figure II.4.1 : Emission et réception des obstacles
Les capteurs ultrasons fonctionnent en mesurant le temps de retour d’une onde sonore inaudible par l ‘homme émis par le capteur. La vitesse du son étant à peu près stable, on en déduit la distance à l’obstacle. Les ultrasons sont des ondes infra-acoustique, qui oscillent à des fréquences supérieures au seuil acoustique. Ceci est important à plusieurs niveaux :
Le premier est que cette fréquence n’interfère pas avec le bruit audible produit par la majorité des corps physiques de notre environnement.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 16 La deuxième est que ces fréquences sont très précises, rapides et peuvent être personnalisées. Les capteurs fournis ont souvent la forme d’une paire car il y a deux parties essentielles :
• L‛ émetteur
• Le récepteur
figure II.4.2 : Transformation d’onde
L’émetteur émet un son à une fréquence définie et le récepteur collecte le son répercuté par les obstacles. La distance aux objets est calculée par le temps mis par le son pour revenir au récepteur.
2-L’émission:
La fréquence du signal de l’émetteur couramment utilisé est égale à 40 KHz, sa production nécessite l’un des TIMER du microcontrôleur. Cette fréquence n‛est efficace que si l‛émetteur ultrason est alimenté par une tension au moins égale à 4.5 V
3-La réception:
Le capteur transforme les variations de pression acoustique en signal électrique.
Ce signal électrique analogique de quelques millivolts est amplifié.
Le signal amplifié est mis en forme pour pouvoir être traité par microcontrôleur. Le signal fourni par le capteur a une amplitude de l'ordre de 10 mV, celle-ci diminue avec la distance.
Son exploitation au niveau du microcontrôleur nécessite une amplitude de quelques volts qui varie de 0 à 5 V donc nécessite son amplification. Nous avons choisi d’utiliser le module le plus disponible sur le marché : HC-SR04
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 17
4-Caractéristiques de HC-SR04:
Dimensions : 45 mm x 20 mm x 15 mmPlage de mesure : 2 cm à 400 cm
Résolution de la mesure : 0.3 cm
Angle de mesure efficace : 15 °
Largeur d'impulsion sur l'entrée de déclenchement : 10 μs (Trigger Input Pulse width)
5-Facteurs d’influence
:
Le capteur ultrasonique comporte certains inconvénients :
Il est très vite inopérant lorsqu’il y a présence d’échos parasites, en présence de poussière ou encore lorsque le niveau mesuré se trouve dans un endroit trop étroit. Aucun fonctionnement possible dans le vide.
Il y a une zone que l'on appelle zone morte et qui correspond à la distance minimum que doit avoir le niveau à détecter par rapport au capteur pour que celui-ci fonctionne correctement
Figure II.4.3 : diagramme des obstacles
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 18
Figure II.4.4 : capteur ultrason HC-SR04
II.4.4 : Moteurs DC
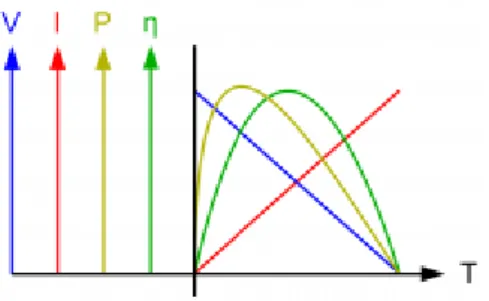
Les moteurs DC avec des aimants permanents sont très courant dans les différentes applications, avec de petits dimensions, lorsqu’on recherche beaucoup de puissance a bas prix. A cause de leur vitesse assez importante, ils sont utilisés dans plusieurs sortes de transmissions (pour obtenir beaucoup de couple avec peu de vitesse).
Figure II.5.1 : Relation entre les moteurs
Le graphe parfait de la relation entre la vitesse (V), le courant (I), la puissance (P), le rendement (η) et le couple (T) d’un moteur DC
Les moteurs DC à aimant permanent sont d’une fabrication assez simple et les commander est assez élémentaire. Bien que les contrôler soit assez simple, leur vitesse n’est pas déterminée précisément par le signal de contrôle parce qu’il dépend de nombreux autres facteurs, dont le couple appliqué sur l’arbre et le courant d’alimentation. La relation entre le couple et la vitesse d’un moteur DC parfait est linéaire, ce qui signifie que : plus grand est l’effort sur l’arbre, plus petite est la vitesse de l’arbre et plus grand est le courant dans la bobine.
Les moteurs DC utilisent la tension DC et ne nécessitent pas de contrôle électronique supplémentaire puisque toutes les communications nécessaires sont faites dans le moteur. Lorsque le moteur fonctionne, deux broches statiques glissent dans le commutateur de rotation et garde la tension dans la bobine. La direction de la rotation du moteur est déterminée par la polarité du courant appliqué. Si le moteur ne doit tourner que dans une seule
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 19 direction, alors le courant peut passer à travers un relai où tout autre connexion simple. Si le moteur doit tourner dans plusieurs directions, on utilisera un circuit électronique appelé H-bridge (ou “demi-pont”) .
Ce moteur avec ces engrenages par définition, motoréducteur possède une tension de commande de 6V et une vitesse de rotation de 180 tours/min.
1-Les caractéristiques techniques des moteurs
Rapport de réduction : 1:120
Vitesse hors-charge (3V) : 100 tours/min Vitesse hors-charge (6V) : 200 tours/min Courant hors-charge (3V) : 60mA Courant hors-charge (6V) : 71mA Courant d'arrêt (3V) : 260mA
Courant d'arrêt (6V) : 470mA Dimension : 55mm x 48.3mm x 23mm
Poids : 45g
2-Varier la vitesse( PWM)
Le réglage de la vitesse de rotation du moteur à courant continu possède une relation directe entre sa tension d’alimentation et sa vitesse de rotation. En effet, plus la tension à ses bornes est élevée et plus son axe tournera rapidement (dans la limite de ses caractéristiques évidemment). Cependant le microcontrôleur d’Arduino n’est capable de produire que des tensions de 0 ou 5V. En revanche, il peut “simuler” des tensions variables comprises entre 0 et 5V. Nous obtenons une tension moyenne (comprise entre 0 et 5V) en sortie de la carte Arduino.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 20
Figure II.5.3 : moteur à courant continu et sa structure interne
II.4.5 : Composant L298N
Ce break out board est un Double pont-H destiné au contrôle de moteur continu(H-Bridge Motors Drive).il est base sur le composant l298N qui est un double pont –H conçu spécifiquement pour ce cas d’utilisation.
C’est un module extrêmement utile pour contrôler de robot et ensembles mécanisés. Il peut contrôler deux moteurs courant continus ou un moteur pas –à-pas quatre (4) fils et deux (2) phases.
Il est conçu pour supporter les tensions plus élevées, des courants importants en proposant une commande logique TTL (basse tension, courant faibles, idéal donc pour un microcontrôleurs). Il peut piloter des charges inductives comme des relais solénoïdes, moteurs continus et moteurs pas-à-pas. Les deux types de moteurs peuvent être contrôlés aussi bien en vitesse (PWM) qu’en direction. Toutes sorties en puissance sont déjà protégées par des diodes anti-retour.il s’agit d’un module prêt a l’emploi. Caractéristiques Leger, petit des capacités hors-pair pour contrôler moteurs diodes de protection un dissipateur ( pour dissiper la chaleur en cas de forte charge) un sélecteur pour sélectionner la source d’alimentation quatre sélecteurs pour les résistances pull up sortie deux moteurs continu et un moteur pas-à-pas (4 bobines, deux phases) indicateurs LED pour sens de rotation moteur indicateur LED pour alimentation 5V 4 trous de fixation standard.[11]
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 21
1- Spécification du composant
Le L298N alimente une charge : de +6V à 35V courant max (en pointe) : 2A tension de commande logique Vss : de +5 à 7V (alimentation interne de +5V) courant de commande logique de 0 à36mA tensions pour contrôler du sens :
Low-0.3~1.5V high :2.3V~Vss tensions pour contrôle ‘’Enable’’ :Low-0.3~1.5V, high :2.3V~Vss puissance max :25W(température 75) température de fonctionnement : de -25 à+130 dimensions :60mmx54mm poids :48 idées d’applications pilotages d moteurs continu(eg :voiture téléguidée ,montage divers à base de moteurs) pilotage de moteur pas –à-pas4 fils deux phases précautions s’assurer que le pole positif soit raccordé à WMS et le pole négatifà GND la tension d’entrée (étage de puissance) ne doit pas excéder 35V détails techniques.
Figure II.6 : Composant L298N
II.4.6 : Module Bluetooth HG-06
Bluetooth est une spécification de l'industrie des télécommunications. Elle utilise une technique radio courte distance destinée pour simplifier les connexions entre les appareils électroniques. Nous allons utiliser le module Bluetooth afin de communiquer l’ Arduino avec Smartphone (Android).
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 22 VCC (carte Bluetooth) ⇒ Arduino 5V
TX-O (carte Bluetooth) ⇒ Arduino RX (0) RX-I (carte Bluetooth) ⇒ Arduino TX (1)
Nous allons commencer par nous connecter à l’Arduino par Bluetooth. Le mot [9]de passe est 1234. Une fois connecté, nous allons installer une application pour lui envoyer des chiffres.
1- Caractéristiques du module Bluetooth HG-06
Le module Bluetooth est doté :
Module de type JY-MCU / HC-06 Master
Paramétrage par défaut du port série: 9600.
Alimentation de 3.3 à 5V DC
LED indicatrice : statut de connexion.
Fonctionnement bluetooth sur la bande 2.4 -2.8 GHz. Modulation: GFSK (Gaussian Frequency Shift Keying) Puissance d'émission: <= 4dBm, classe 2
Vitesse: asynchrones: 2.1 Mbps (max)/160 kbps, synchrones: 1 Mbps/1 Mbps Puissance Classe: (+ 6dBm)
Courant: éplucher-35mA, connecté-8mA Température:-40 ~ + 105 degrés Celsius
Défini par l'utilisateur vitesse de transmission: 4800, 9600, 19200, 38400, 57600, 115200, 230400,460800, 921600, 1382400.
Dimension: 35.7mm * 15.2mm
Le module est appairer avec un mot de passe (1234) modifiable.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 23
II.4.7 : Panneaux solaire
Le module solaire photovoltaïque est un système capable de capter l'énergie envoyée par le soleil vers la Terre, et de la convertir en courant électrique continu. Ce procédé est rendu
possible par les cellules photovoltaïques qui composent le module. Chaque cellule est produite à l'aide d'un matériau semi-conducteur appelé le silicium. ... En effet, la lumière du soleil se compose de photons qui vont venir frapper la surface du panneau solaire photovoltaïque.[13]
Le fonctionnement d’un panneau solaire photovoltaïque repose sur plusieurs éléments :
Un module composé de cellules photovoltaïques transformant l'énergie en tension électrique continue;
Un système de montage, également appelé système d'intégration à la toiture qui ancre le panneau photovoltaïque au bâti ;
Un abrégement qui établit une jonction étanche entre le panneau et le reste de la toiture.
Figure II.8: panneaux solaire
II.4.8 : Régulateur de charge
Le régulateur de charge est utilisé dans les systèmes autonomes de l'énergie solaire photovoltaïque. Il peut également être appelé contrôleur de charge .Le régulateur de charge/décharge est associé à un générateur photovoltaïque, il a [14] pour rôle, entre autres, de contrôler la charge de la batterie et de limiter sa décharge. Sa fonction est primordiale car elle a un impact direct sur la durée de vie de la batterie.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 24
II.4.9 : Batterie 12v
La batterie 12v est une batterie utilisé pour stocker l’énergie venant du panneaux solaire. L'électricité produite par les panneaux solaires en journée y sera stockée, avant d'être utilisée au moment où on a vraiment besoin. la batterie de stockage solaire nous permet de stocker puis consommer notre énergie solaire quand nous le souhaitons.La durée de vie d’une batterie dépend de plusieurs variables : le nombre de cycles, la puissance de charge prélevée, la profondeur de décharge des cycles, l’état de charge ou encore la température[15] ambiante de la pièce.
Figure II.10 : batterie 12v
Figure II.9 : Régulateur de charge
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 25
II.5 : Conclusion
Dans ce chapitre, nous avons fait une étude théorique de notre projet réalisation et commande d’un détecteur d’obstacle. Nous avons rédigé un cahier des charges du projet dans lequel nous décrivons les spécifications du projet. Ensuite nous avons élaboré un schéma synoptique du projet à partir duquel nous avons pu réaliser ce projet. Nous terminons ce chapitre par des détails sur chaque composant ainsi que son rôle dans le Robot.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 26
CHAPITRE III
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 27
III.1-Définition d’un robot
Un robot est un dispositif mécatronique, il allie de la mécanique, de l’électronique et de l’informatique. Il accomplit automatiquement soit des tâches qui sontgénéralement dangereuses, pénibles, répétitive ou impossible pour les humains, soit des tâches plus simples mais en les réalisant mieux que ce que ferait un être humain.
III.2-Schéma synoptique d’un robot
Figure III.1 :
Schéma synoptique d’un robot
Le système mécanique articulé (S.M.A.) est un mécanisme ayant une structure plus ou moins proche de celle du bras humain. Il permet de remplacer, ou de prolonger, son action. Son rôle est d'amener l'organe terminal dans une situation (position et orientation) donnée. Son architecture est une chaîne de corps, généralement rigides, assemblés par des liaisons appelées articulations.
La motorisation est réalisée par des actionneurs électriques, pneumatiques ou hydrauliques qui transmettent leurs mouvements aux articulations.
Les capteurs sont des organes de perception : proprioceptifs lorsqu'ils mesurent l'état interne du robot (positions et vitesses des articulations) et extéroceptifs lorsqu'ils recueillent des informations sur l'environnement (détection de présence, de contact, mesure de distance, vision artificielle).
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 28 L’organe terminal : dispositif destiné à manipuler des objets (dispositifs de serrage, dispositifs magnétiques, …), ou à les transformer (outils, torche de soudage, pistolet de peinture, …). Il s'agit d'une interface permettant au robot d'interagir avec son environnement.
La partie commande synthétise les consignes des asservissements pilotant les actionneurs, à partir de la fonction de perception et des ordres de l'utilisateur.
III.3 Types de robots
Il existe deux types de robots : -Robots manipulateurs -Robots mobiles
III3.1
-Robot manipulateur
Ce sont des robots à base fixe constitués d’un bras. Le bras est un ensemble de corps reliés par des liaisons (rotoïdes ou prismatiques). En général le bras manipulateur se termine par un outil ou un organe de préhension (pince, main, etc.…). La plupart des robots sont fixes et leurs environnements parfaitement défini à l’avance. Grâce à la chute des prix et la fiabilité des composants électroniques.
III.3.2-Robot mobile
Les robots mobiles sa liberté de mouvement lui donne son autonomie pour interagir dans le monde des humains. Le robot mobile est d’abord une base mobile ; à ce titre il peut être utilisé pour le transport. Mais, dès lors qu’il est équipé d’un bras manipulateur ou d’une caméra, ses applications sont plus nombreuses (surveillance, exploration, …).
Les déplacements représentent l’aspect le plus important d’un robot mobile. Les outils dont il peut être équipé doivent être considérés comme des robots de type fixe et indépendants dans un premier temps. Dans notre travaille on s’intéresse àce type de robot, nous allons
réaliser
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 29 un véhicule autoguide a base d’une Arduino Uno comme il est présenté dans tous ce qui suit.Il existe plusieurs applications dans le robot mobile
III.4-Application des robots mobiles
:III.4.1. Robot d’exploration des planètes
A l’image de Séjourner une mission qui marquait le grand retour des Américains sur la planète rouge, plus de vingt ans après les missions Viking. C’était aussi la première fois qu’un robot mobile déambulait sur une autre planète que la Terre. Elle a constitué un succès total pour la NASA, notamment car elle a validé des prouesses technologiques qui n'avaient jamais été utilisées (jusqu'alors, tels les coussins gonflables, dits « airbags », pour se poser sur le sol. Mars Pathfinder est aussi remarquable au vu de son coût, très bas par rapport à d'autres missions spatiales robotisées. L'atterrissage est enfin une prouesse, car deux tiers des vaisseaux envoyés vers la planète Mars n'ont jamais atteint leur objectif final.
Figure III.2 : Robots d’exploration Figure III.3 : Robots militaires
III.4.2. Les robots militaires
Un robot militaire, aussi appelé arme autonome, est un robot, autonome ou contrôlé à distance, conçu pour des applications militaires. Les drones sont une sous classe des robots militaires. Des systèmes sont déjà actuellement en service dans un certain nombre de forces armées, avec des succès remarquables, tel que le drone "Predator", qui est capable de prendre des photographies de surveillance, et même à lancer des missiles air-sol AGM-11
«Hellfire" II ou des GBU-12 "Paveway" II dans le cas du MQ-1 et du MQ-9. Les études se poursuivent car ce type d'engins offre des possibilités prometteuses. Ces robots posent des
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 30 problèmes éthiques et légaux. Cela a conduit des associations ou ONG à mener des actions de sensibilisation à ces problèmes pour encadrer l'utilisation de ces robots militaires.
III.5 Application industrielle
:Un véhicule à guidage automatique, ou véhicule autoguidé (en anglais :
Automatique Guided Véhicules ou (AGV) ou Véhicule à Guidage Automatique
(VGA) est un robot qui se déplace de façon autonome sans l’intervention
humaine. Les technologies d’automatisation traditionnelles sont le
filoguidée, le laser guidage et l’autoguidage. Cependant, d’autres
technologies aussi performantes existent telles que le géo guidage et le guidage
par ultrason. Les AGV sont le plus souvent utilisés dans des applications
industrielles pour déplacer de manière autonome des marchandises dans une
usine, un entrepôt ou un atelier. Ainsi, l’expression chariot automatique pour
désigner un AGV trouve son origine dans les premiers AGV présents sur
le marché
: des chariots de manutention pour le transport de palettes. En effet, le premier AGV a vu le jour dans les années 50, initialement développé pour l'industrie automobile. De nos jours, leurs applications ont été élargies et ils ne sont plus limités au secteur industriel. Ils sont également utilisés dans des hôpitaux, musés, aéroports…III.5.1 Robot de liaison en usine :
Application domestiques :Un robot aspirateur (ou aspirateur robot) est un aspirateur robotisé, c'est-à-dire capable de réaliser le travail d'un aspirateur de manière autonome, sans intervention d'un être humain. C'est en 2009 que s'ouvre le principal marché de robots domestiques dans le monde. Le Roobas, fabriqué par la société Irobot, a été vendu à plus de cinq millions d'exemplaires en 2009.Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 31
Figure III.5 : Robot aspirateur
III.5.2 Les Robots bipèdes
III.6.Dans la robotique on trouve deux types de marches :
Marche dynamique
- Perte d'équilibre entre chaque pas. - Difficulté : s'arrêter en pleine marche.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 32
Marche quasi-statique
:Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 33
CHAPITRE IV
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 34
IV.1 : Introduction
Dans ce chapitre, nous allons passer à la réalisation pratique du robot. Nous allons d’abord commencer par détailler le fonctionnement du Robot, ensuite nous réaliserons le logiciel afin de pouvoir simuler le projet sur un logiciel dédié. Après la simulation, nous testerons le projet si tout marche comme prévu, nous procéderons avec les tests finaux et la validation.
IV.2 : Schéma électronique du projet
Pour mieux prédire le comportement de notre robot la simulation est exigée, on a réalisé ce
Schéma suivant pour la version basic (détecteur d’obstacle) : Cette méthode basée sur un entête de détection dynamique afin de garantir la précision ainsi
une décision un peu intelligente par rapport au méthode classique. Donc en pratique, on obtiendra le montage suivant :
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 35 Ce schéma a été réalisé avec le logiciel Proteus 8 Professional, qui est en même temps le logiciel que nous avons choisi pour simuler notre projet. Les labels de même nom sont connectés. Dans ce schéma certains composants que nous devons utiliser la réalisation du montage final n’existe pas. Mais on a simulé au moins avec les composants que l’on trouve dans la librairie.
IV.2.1.Logiciel fritzing
Fritzing est un projet de logiciel libre, destiné aux à l’électronique. Il a notamment pour vocation de favoriser l'échange de circuits électroniques libres et d'accompagner l'apprentissage de la conception de circuits. Le logiciel conçu par la faculté de sciences appliquée de l'Université de Potsdam et dont le développement est assuré par la fondation, également nommée Fritzing, est un logiciel d'édition de circuit imprimé. Il est disponible dans seize langues dont le français. Il est adapté aux débutants où confirmés en électronique pour faire rapidement des circuits simples, et est également un bon outil didactique pour apprendre à bidouiller en électronique par la pratique
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 36
IV.3 : Logiciel
IV.3.1 : La conception du logiciel sous l’environnement Arduino
La partie logicielle est la partie la plus complexe de ce projet. Le programme est évidemment écrit en langage Arduino.
Des détails sur l’environnement de développement et la structure d’un programme Arduino sont donnés dans « Annexe 2.3 ». Comme tout programme Arduino, notre programme se décompose en trois (03) parties :
Déclaration des variables, des constantes, l’inclusion des librairies…
Figure IV.3 : Partie déclaration dans le programme
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 37
Figure IV.4 : Fonction « setup ( ) » du programme
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 38
Figure IV.5 : Fonction « loop ( ) » du programme
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 39
IV.3.3 : Organigramme
Le schéma bloc explicatif du notre robot est présenté sur cette figure
Figure IV.6 :
Schéma bloc
Projet
mécanique
informatique
électronique
C Coonncceeppttiioonn d duurroobboott C Chhooiixxddeellaa s soolluuttiioonn t teecchhnniiqquuee R Rééaalliissaattiioonn d duu p prrooggrraammmmee L Leessccaapptteeuurrss
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 40 Schéma détaillé du robot
M
M
o
o
t
t
e
e
u
u
r
r
l
l
2
2
9
9
8
8
N
N
A
A
r
r
d
d
u
u
i
i
n
n
o
o
U
U
n
n
o
o
C
C
a
a
p
p
t
t
e
e
u
u
r
r
u
u
l
l
t
t
r
r
a
a
s
s
o
o
n
n
S
S
e
e
r
r
v
v
o
o
m
m
o
o
t
t
e
e
u
u
r
r
B
B
l
l
u
u
e
e
t
t
o
o
o
o
t
t
h
h
P
P
a
a
n
n
n
n
e
e
a
a
u
u
x
x
s
s
o
o
l
l
a
a
i
i
r
r
e
e
s
s
Régulateur
de charge
Batterie
12v
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 41 Organigramme du haut niveau du fonctionnement du robot
Début
Mode=!
mode
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 42
1-Mode Automatique
SM = 90°et uson <=15cm SM=180° uson<=15cm non non non oui regarde à gauche oui regarde avant1
aller à gauche regarde à droite M=50°uson< =15cm aller à droite Demi tour oui avance SM: Servomoteur uson=ultrasonProjet fin d’étude électronique des systèmes embarqués 2018-2019 Page 43
2-Mode Manuel
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 44
IV.4 : Montage du robot
Une fois les différentes pièces montées, le robot se présente comme sur la figure suivante :
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 45
IV.5 : Conclusion
Un robot mobile autonome est une machine qui a besoin, pour sa mise en œuvre, de spécialistes dans des nombreux domaines comme la mécanique, l’automatique, l’électronique, l’électrotechnique et l’informatique. Et de même pour son indispensabilité dans les différentes applications soit: Militaire, industriel, exploration des planètes ou bien domestiques
.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 46
Conclusion générale et perspectives
L'objectif de notre travail est la réalisation d'un robot mobile type voiture avec détection d’obstacles en utilisant des capteurs de distances (ultrason) ainsi que l’application Android. Pour réaliser ce travail, on a passé par différentes étapes, l’utilisation d’un capteur ultrasonique HC-SR04 pour la détection des obstacles et le calcul de la distance entre le robot et l’obstacle, dans notre cas, l’obstacle doit être distant de quinze (15) cm pour être détecté. Le robot réalisé se déplace par quatre roues ; deux roues arrière et deux roues avant qui s’occupent du mouvement par quatre moteurs à courant continu. Nous avons utilisé ce type de moteur pour la précision dans le déplacement et la rotation du Robot. Des circuits de commande son réalisés afin de contrôler les moteurs associes. L'ensemble de système de perception et de déplacement est commandé par un microcontrôleur qui doit en utilisant les informations actuelles, décider l'action à prendre. Pour notre cas; on a utilisé le microcontrôleur célèbre, l’arduino Uno. Les nombreuses difficultés l’indisponibilité des composants électroniques et les nombreux ralentissements rencontrés nous ont permis de comprendre nos erreurs dans notre approche et dans notre stratégie de travail. Les réflexions apportées afin de proposer des solutions convenables sont une partie du projet que nous avons particulièrement apprécié. Nous pouvons utiliser des cameras de haute qualité à cause de la perturbation de l’environnement (luminosité, les obstacles inévitables, et Utilisé une méthode de détection des objets basé sur les couleurs. Les possibilités d’optimisation du robot sont nombreuses et nous lassent alors optimistes quant à une réalisation aboutie du projet.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 47
Annexes
Annexe 1 : Les microcontrôleurs
Annexe 1.1 : Définition d’un microcontrôleur
On peut définir un microcontrôleur comme étant un circuit intégré programmable contenant un petit système informatique. Tout comme un ordinateur, il contient un processeur, des mémoires de données et de programme, des circuits d’interfaces d’entrées-sorties pour communiquer avec le monde extérieur et toute la circuiterie électronique et logique nécessaire pour fonctionner tout cela ensemble. Il nécessite une mise en œuvre matérielle (électronique) et une mise en œuvre logicielle (informatique).
Annexe 1.2 : Généralités
Pour fonctionner, tous les microcontrôleurs, quelques soient leur type ou leur fabricant, sont en fait des systèmes à microprocesseur nécessitant certains circuits de base tels que :
Une alimentation
: L’alimentation est évidemment le premier élément indispensable dans tout circuit électronique. Tous les microcontrôleurs actuels fonctionnent sous une tension unique qui varie, selon les types de circuits, de 1.8 à 6 volts environ, avec une prédilection encore aujourd’hui pour la tension 5 volts même si on se dirige peu à peu vers des versions fonctionnant sous une tension de 3.3 volts (3V3). La tension d’alimentation d’un microcontrôleur doit être stabilisée afin d’assurer un fonctionnement correct de celui-ci.Une horloge
: Le deuxième élément indispensable au fonctionnement d’un microcontrôleur est l’horloge. Son rôle est de cadencer le rythme d’exécution des instructions. La fréquence de cette horloge dépend du type du microcontrôleur utilisé et peut varier de quelques kilohertz (kHz) à plusieurs dizaines de mégahertz (MHz) (dans un PC ou un Mac, on dépasse même le gigahertz (GHz)). Plus la fréquence d’horloge est élevée, plus le microcontrôleur est rapide mais, en contrepartie, plus il consomme d’énergie.Généralement la fréquence de cette horloge est parfaitement stable car rares sont les applications qui n’ont pas besoin de mesurer du temps ou générer des signaux aux chronogrammes précis, et cela n’est possible que si l’horloge qui
pilote le
microcontrôleurProjet fin d’étude électronique des systèmes embarqués 2018-2019 Page 48 est elle-même stable. Elle est généralement pilotée par un quartz ou au moyen d’un résonateur céramique, seuls composants électroniques capables de générer des signaux à une fréquence stable et précise.Il existe différents circuits pour réaliser l’horloge en externe. Le plus facile et le plus couramment utilisé est constitué d’un quartz relié avec des condensateurs de filtrage aux broches d’horloges (OSC1 et OSC2 ou CLKIN et CLKOUT) du microcontrôleur, avec une résistance (pas toujours nécessaire) à OSC2 comme présenté dans le schéma ci-dessous
:
Schéma du circuit pour l’horloge externe du microcontrôleur.
Le Processeur
:appelé unité de traitement central (en anglais CPU pour Central Processing Unit). C’est le cerveau du système. Il est l’unité de traitement d’informations travaillant en trois (03) étapes : lire l’instruction, décoder l’instruction et exécuter l’instruction. Il contrôle les autres modules constituant le système à savoir les mémoires et les interfaces d’entrées sorties et travaillant à de très grandes vitesses.
La mémoire :
L'ATmega 2560 a 256Ko de mémoire FLASH pour stocker le programme (dont 8Ko également utilisés par le bootloader). L'ATmega 2560 a également 8 ko de mémoire SRAM (volatile) et 4Ko d'EEPROM (non volatile - mémoire qui peut être lue à l'aide de la librairie EEPROM) .
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 49 Pour info : Le bootloader est un programme préprogrammé une fois pour toute dans l'ATméga et qui permet la communication entre l'ATmega et le logiciel Arduino via le port USB, notamment lors de chaque programmation de la carte
.
Les entrées et sorties numériques
:Chacune des 54 broches numériques de la carte uno peut être utilisée soit comme une entrée numérique, soit comme une sortie numérique, en utilisant les instructions pinMode(), digitalWrite() et digitalRead() du langage Arduino. Ces broches fonctionnent en 5V. Chaque broche peut fournir ou recevoir un maximum de 40mA d'intensité et dispose d'une résistance interne de "rappel au plus" (pull-up) (déconnectée par défaut) de 20-50 KOhms. Cette résistance interne s'active sur une broche en entrée à l'aide de l'instruction digitalWrite(broche, HIGH).De plus, certaines broches ont des fonctions spécialisées :
Communication Serie: Port Serie Serial : 0 (RX) and 1 (TX); Port Serie Serial 1: 19 (RX) and 18 (TX); Port Serie Serial 2: 17 (RX) and 16 (TX); Port Serie Serial 3: 15 (RX) and 14 (TX). Utilisées pour recevoir (RX) et transmettre (TX) les données séries de niveau TTL. Les broches 0 (RX) and 1 (TX) sont connectées aux broches correspondantes du circuit intégré ATmega8U2 programmé en convertisseur USB-vers-série de la carte, composant qui assure l'interface entre les niveaux TTL et le port USB de l'ordinateur.
Interruptions Externes: Broches 2 (interrupt 0), 3 (interrupt 1), 18 (interrupt 5), 19 (interrupt 4), 20 (interrupt 3), et 21 (interrupt 2). Ces broches peuvent être configurées pour déclencher une interruption sur une valeur basse, sur un front montant ou descendant, ou sur un changement de valeur. Voir l'instruction attachInterrupt() pour plus de détails.
Impulsion PWM (largeur d'impulsion modulée): Broches 0 à 13. Fournissent une impulsion PWM 8-bits à l'aide de l'instruction analogWrite().
SPI (Interface Série Périphérique): Broches 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). Ces broches supportent la communication SPI (Interface Série Périphérique) disponible avec la librairie pour communication SPI. Les broches SPI sont également connectées sur le
connecteur ICSP qui est mécaniquement
compatible avec les cartes Uno, Duemilanove et Diecimila.
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 50 I2C: Broches 20 (SDA) et 21 (SCL). Supportent les communications de protocole
I2C (ou interface TWI (TwoWire Interface - Interface "2 fils"), disponible en utilisant la librairie Wire/I2C (ou TWI - Two-Wire interface - interface "2 fils") . Noter que ces broches n'ont pas le même emplacement que sur les cartes Uno, Duemilanove ou Diecimila.
LED: Broche 13. Il y a une LED incluse dans la carte connectée à la broche 13. Lorsque la broche est au niveau HAUT, la LED est allumée, lorsque la broche est au niveau BAS, la LED est éteinte.
Broches analogiques :
La carte uno dispose de 8 entrées analogiques, chacune pouvant fournir une mesure d'une résolution de 10 bits (càd sur 1024 niveaux soit de 0 à 1023) à l'aide de la très utile fonction analogRead() du langage Arduino. Par défaut, ces broches mesurent entre le 0V (valeur 0) et le 5V (valeur 1023), mais il est possible de modifier la référence supérieure de la plage de mesure en utilisant la broche AREF et l'instruction analogReference() du langage Arduino.
Note : les broches analogiques peuvent être utilisées en tant que broches numériques.
Les bus processeurs :
Un bus est un ensemble de pistes électroniques servant à véhiculer les informations entre le processeur et les autres modules du système (mémoires, interfaces d’E/S, etc…). De ce fait, il existe trois types de bus : le bus de données véhicule les données, le bus d’adresses véhicule les adresses et le bus de contrôle achemine les signaux de contrôle tels les signaux de validation mémoire, les ordres de lecture et d’écriture, etc… . [5]
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 51
Langage de programmation
Langage de programmation arduino
Un langage de programmation est un langage permettant à un être humain d'écrire un ensemble d'instructions (code source) qui seront directement converties en langage machine grâce à un compilateur (c'est la compilation).
Le logiciel de programmation des modules Arduino est une application Java et multiplateforme, servant d'éditeur de code et de compilateur, et qui peut transférer le firmware et le programme au travers de la liaison série (RS-232, Bluetooth ou USB selon le module). Il est également possible de se passer de l'interface Arduino, et de compiler et uploader les programmes via l'interface en ligne de commande.
Le programme est constitué d'une série d'instructions saisie dans la fenêtre du logiciel. La spécificité d'Arduino se situe au niveau de la sauvegarde du code qui s'enregistre et s'exécute habituellement depuis le microcontrôleur et non pas sur votre ordinateur. Le programme se lance dès que l'appareil Arduino est mis sous tension.
Le langage de programmation utilisé est le C++, et lié à la bibliothèque de développement Arduino, permettant l'utilisation de la carte et de ses entrées/sorties. La mise en place de ce langage standard rend aisé le développement de programmes sur les plates-formes Arduino, à toute personne maîtrisant le C ou le C++. [3]
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 52
Annexe 2 : L’Arduino
Annexe 2.1 : Qu’est-ce que l’Arduino ?
L’Arduino est une carte à microcontrôleur c’est-à-dire un ensemble constitué d’un
Microcontrôleur et toute la circuiterie nécessaire à son bon fonctionnement montés sur une seule carte de taille très réduite. La carte est accompagnée d’un logiciel (EDI) multiplateforme servant à développer n’importe quelle application à implanter sur la carte avec un langage de programmation dédié que l’on peut appeler le « langage Arduino » qui est un mélange de C et de C++ restreints aux seules possibilités de la carte.
Les concepteurs de l’Arduino ont fixé leur choix sur les microcontrôleurs fabriqués par la société Atmel, et plus précisément sur la famille AVR de ce fabricant. Ce choix des AVR par les concepteurs de l’Arduino est fait sur plusieurs critères tels que l’excellent compromis prix/puissance que représentent les microcontrôleurs AVR et, même s’il ne s’agit que de microcontrôleurs à unité centrale 8 bits, ils permettent de développer des applications très intéressantes.
Le but et l’utilité
Le système Arduino, nous donnela possibilité d'allier les performances de la programmation à celles de l'électronique. Plus précisément, nous allons programmer des systèmes électroniques. Le gros avantage de l'électronique programmée c'est qu'elle
Simplifie grandement les schémas électroniques et par conséquent, le coût de la réalisation, mais aussi la charge de travail à la conception d'une carte électronique.
L'utilité est sans doute quelque chose que l'on perçoit mal lorsque l'on débute, mais une fois que vous serez rentré dans le monde de l'Arduino, vous serez fasciné par l'incroyable puissance dont il est question et des applications possibles
.
Application
Le système Arduino, nous permet de réaliser un grand nombre de choses, qui ont une application dans tous les domaines
Exemple :
contrôler les appareils domestiques fabriquer votre propre robot
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 53
Annexe 2.2 : L’Arduino Uno
Une carte Arduino est une carte électronique équipée d’un microcontrôleur. Le microcontrôleur permet, à partir d'événements détectés par des capteurs, de programmer et commander des actionneurs ; la carte Arduino est donc une interface programmable. La carte Arduino la plus utilisée est la carte Arduino Uno..
.figureA.4 : Carte arduino Uno
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 54 Circuit du schéma interne de la carte arduino Uno[1]
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 55
Annexe 2.3 : Le logiciel Arduino
Le logiciel est un environnement de développement intégré (IDE) écrit en langage Java, totalement gratuit et facilement téléchargeable sur le site officiel de l’Arduino à savoir www.arduino.cc. Le logiciel étant multiplateforme, télécharger la version correspondant à votre système d’exploitation.Une fois, le logiciel et ses pilotes, correctement installés, on peut donc programmer nos cartes Arduino. L’interface utilisateur du logiciel est présentée
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 56
FigureA.5 : interface utilisateur du langage arduino
On peut voir deux fonctions qui se présentent automatiquement dès qu’on ouvre le logiciel : il s’agit de la fonction setup ( ) et de la fonction loop ( ). En effet, tout programme Arduino, appelé sketch, doit contenir obligatoirement ces deux fonctions spécifiques. Même si, elles sont vides, le programme ne marche pas si au moins l’une d’entre elles est absente.
La fonction setup ( ) n’est exécutée qu’une seule fois juste après le lancement du programme. Elle contient généralement les instructions d’initialisation de certaines ressources de la carte telles que, par exemple, définition des lignes des ports parallèles soit en entrées ou en sorties, définition de la vitesse de fonctionnement du port série, etc…
Projet fin d’étude électronique des systèmes embarqués 2018-2019 Page 57 Quant à la fonction loop ( ), elle est la boucle principale et se répète indéfiniment tant que l’Arduino restera sous tension. En d’autres termes, suite à un reset au moyen de son poussoir ou suite à une mise sous tension qui a pour effet de provoquer un reset automatique, l’Arduino exécute une seule fois les instructions contenues dans la fonction setup ( ) puis exécute ensuite indéfiniment les instructions contenues dans la fonction loop ( ) de ce même programme. Ces fonctions ne retourne pas de résultat, elles sont donc déclarées avec le mot clé «void ».
Selon le cas, une troisième partie peut ou non être présente dans un programme Arduino mais ne contient pas d’instructions exécutables. Il s’agit de la zone de définition de constantes au moyen du mot clé « define » ou de « const », d’inclusion d’éventuelles bibliothèques utilisés par le programme au moyen du mot clé « include », définition de variables, etc... Cette partie, si elle est présente, se place avant la fonction setup ( ), qui elle-même se place avant la fonction loop ( ). Tout comme le langage C, le langage arduino est composé de fonctions arithmétiques et mathématiques, des opérateurs de comparaison et opérateurs logiques, les structures de contrôle (prise de décision, boucles et sauts), des fonctions de gestion du temps et des entrées/sorties et beaucoup d’autres fonctions spécifiques à l’Arduino (gestion du port série, gestion d’interruption, générateur de nombre aléatoire, jouer des notes de musique, etc…).