HAL Id: hal-02808427
https://hal.inrae.fr/hal-02808427
Submitted on 6 Jun 2020
HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Utilisation des SIG et de la proxi-détection pour le
phénotypage au champ
Yann Forget
To cite this version:
Yann Forget. Utilisation des SIG et de la proxi-détection pour le phénotypage au champ. Sciences du Vivant [q-bio]. 2013. �hal-02808427�
Université de Toulouse
MASTER 1
Mention
Géographie et Aménagement
Spécialité
Géographie de l’Environnement et
du Paysage
Rapport de stage
U T I L I S A T I O N D E S S I G E T D E L A
P R O X Y D É T E C T I O N P O U R L E
P H É N O T Y P A G E A U C H A M P
YANN FORGET
Sous la direction de : André Gavaland Martin Paegelow Soutenu le 6 Septembre 2013REMERCIEMENTS
J'adresse mes premiers remerciements à André Gavaland, directeur de l'unité expérimentale, pour m'avoir permis de réaliser ce stage ainsi que pour ses conseils avisés, son enthousiasme et sa confiance.
Je remercie mon enseignant-référant Martin Paegelow, pour sa disponibilité et la précision de ses conseils.
Je tiens également à remercier particulièrement Philippe Burger et Vladimir Goutiers de l'unité de recherche INRA d'AGIR pour l'intérêt qu'ils ont porté à mes travaux.
Je remercie Sylvie Ladet, David Shereen et Mathieu Fauvel du laboratoire DYNAFOR pour l'aide ponctuelle mais précieuse qu'ils m'ont apporté au cours de mon stage.
Enfin, mes remerciements sincères à toute l'équipe du domaine expérimental pour leur accueil et leur indulgence vis-à-vis de mes connaissances agronomiques. Je remercie ainsi Paul Bataillon, Patrick Bruno, Eric Bazerthe, Didier Campergue, Jean-François Lievin, Jean-Michel Berceron, Geneviève Santoro et Marie Vrignaud.
I. SOMMAIRE
INTRODUCTION
...4I.LE CONTEXTE DU STAGE
...61.L'Inra et le rôle particulier des unités expérimentales...6
2.Le domaine expérimental « grandes cultures » d'Auzeville...7
3.Le SIG du domaine, récent mais déjà riche ...8
II.L'AGRICULTURE DE PRÉCISION
...111.Émergence du concept dans les années 1980...11
2.Le géo-positionnement, une technologie capitale pour l'AP...11
3.Imagerie et caractérisation des parcelles agricoles...12
III.CARTOGRAPHIE DES RENDEMENTS AGRICOLES
...141.La cartographie de rendement : le point d'entrée de la démarche d'AP...14
2.Les données utilisées...14
3.Conversion des données brutes...14
4.Méthode d'interpolation des données de rendement...16
5.Automatisation du traitement géomatique...17
6.Édition assistée de la carte...19
7.Résultat...20
IV.CARACTÉRISATION DES PARCELLES DE BLÉ PAR ANALYSE
D'IMAGES SATELLITES
...211.Take5, dernière mission de SPOT4...21
2.Limites de la donnée et objectifs de l'étude...21
3.Traitement des données...22
4.Analyse de l'évolution des parcelles...23
5.Analyse des hétérogénéités intra-parcellaires...24
6.Comparaison avec les cartes de rendement et de resistivité des sols...26
7.Perspectives...27
V.ÉLABORATION D'UNE MÉTHODE DE COMPTAGE DES TOURNESOLS
PAR TRAITEMENT D'IMAGES DRONES
...291.Un travail inscrit dans une dynamique de développement de l'imagerie...29
2.Les données sources...29
3.De la prise de vue à l'ortho-mosaïque...29
4.Les sources d'imprécision et d'erreurs...30
5.Exploration des solutions logicielles...31
6.Approche pixel et approche objet en télédétection...32
7.Les obstacles à la classification...33
8.Une première approche par classification Support Vector Machine...35
9.Une seconde approche basée sur les angles spectraux...38
10.Conclusion et perspectives...43
INTRODUCTION
L'institut national de recherche agronomique (INRA) mène des recherches pour une alimentation de qualité, pour une agriculture durable et compétitive, et pour la préservation de l'environnement. Dans le cadre de ses recherches agronomiques, elle bénéficie de l'appui de domaines expérimentaux répartis dans toute la France. Ces unités, constituées d'un dispositif agronomique important (domaine agricole, installation d'élevage, écosystème naturel) et/ou d'infrastructures expérimentales lourdes (parc de serres, halle technologique, animalerie), assurent une série de fonctions spécifiques au sein de l'institut : collecte et caractérisation de ressources génétiques, production de données pour des programmes de recherche, observation de l'environnement, sélection génétique, conception et démonstration de systèmes agricoles, etc.
A Toulouse, l'unité expérimentale « grandes cultures » assure la gestion parcellaire et matérielle du domaine expérimental d'Auzeville soit plus de 80ha de surface agricole utile1. Elle
gère notamment les dispositifs expérimentaux de grande culture en appui aux besoins des scientifiques du centre. Son activité s'axe autour de trois thématiques : l'amélioration des plantes, les intéractions génotype-milieu, et l'évaluation des systèmes de culture à bas niveau d'intrants. Les principales espèces qui y sont étudiées sont les céréales à paille (blé dur, blé tendre, triticale...), le tournesol, le sorgho, le maïs, le pois et le soja.
Avec l'accessibilité grandissante de systèmes de géo-positionnement de précision centimétrique, et la démocratisation des logiciels permettant d'exploiter un système d'information géographique, la pertinence de la géomatique s'est affirmée au sein des unités expérimentales pour la gestion du domaine agricole comme pour la conduite de programmes de recherche. Les spécificités des domaines expérimentaux de l'INRA devant les parcelles agricoles traditionnelles (travail expérimental à l'échelle micro-parcellaire, équipement technologique, ressources techniques et scientifiques, connaissance de l'environnement...) les constituent comme des laboratoires de développement des pratiques relevant de l'agriculture de précision, et donc de la géomatique à finalité agronomique.
Le domaine expérimental d'Auzeville dispose ainsi d'une série complète d'équipement dédiés au géopositionnement : GPS d'arpentage, GPS embarqués sur les machines agricoles, antenne RTK permettant la correction différentielle pour une précision centimétrique, etc. Depuis 2009, elle multiplie les acquisitions de données sur son sol et sur ses champs : cartographie de la résistivité électrique des sols, acquisition d'images drone très haute résolution dans le visible et dans le proche infrarouge, etc. C'est dans la continuité de ce développement que l'unité expérimentale prévoit d'acquérir une aile volante (drone) et ses capteurs pour l'année 2014. Dans ce contexte, ce stage trouve sa place dans l'exploitation des données spatiales produites par le domaine expérimental et dans la recherche de méthodologies adaptées à ses besoins.
Au cours de ce stage, mon activité s'est déployée autour de trois thèmes :
– la cartographie des rendements des parcelles agricoles du domaine grâce à l'exploitation des données géo-référencées issues des capteurs de la moissonneuse-batteuse, l'optimisation et la transmission de méthodes et d'outils adaptés ;
– l'exploitation des données satellites issues du programme Take5 (dans le cadre de la désorbitation de SPOT4) pour la caractérisation des parcelles de blé dur2 ;
1 « La surface agricole utile (SAU) est un instrument statistique destiné à évaluer la surface foncière déclarée par les exploitants agricoles comme utilisée par eux pour la production agricole » Wikipedia
– l'analyse d'images drones à travers l'élaboration d'une méthode de comptage des plants de tournesols, la transmission de méthodes et de compétences en traitement d'image.
Le rapport de ce travail se compose de cinq parties. La première présente la structure d'accueil, le rôle qu'elle exerce au sein de l'INRA, ses fonctions, ses activités, et ses dynamiques actuelles. La deuxième partie traite de la place de la géomatique dans l'agriculture de précision, les pratiques et les usages de télédétection qui s'y développent et l'essor récent de l'imagerie drone. La troisième partie porte sur le travail de cartographie des rendements du domaine, sur le choix des méthodes utilisées, sur l'élaboration d'outils dédiés, et sur la présentation des résultats obtenus. La quatrième partie s'emploie à présenter le travail réalisé dans le cadre de l'analyse des données satellites issues du programme Take5 pour la caractérisation des parcelles de blé dur du domaine. Enfin, la cinquième et dernière partie est consacrée à l'explication des méthodes utilisées (ou abandonnées) pour le comptage des plants de tournesols ainsi qu'à l'évaluation de leur résultat. Le contexte du stage
I. LE CONTEXTE DU STAGE
1. L'INRA ET LE RÔLE PARTICULIER DES UNITÉS EXPÉRIMENTALES
L'INRA est un établissement public à caractère scientifique et technologique (EPST) sous les tutelles du ministère chargé de la Recherche et du ministère chargé de l'Agriculture. Fondé en 1946, il constitue le premier institut de recherche en agronomie en Europe en nombre de publications scientifiques dans les domaines des sciences agricoles et des sciences végétales et animales. Les principales finalités des recherches de l'INRA sont la compétitivité et la durabilité de l'agriculture, la qualité de l'alimentation et la préservation de l'environnement.
L'INRA est présente sur l'ensemble du territoire français à travers ses 18 centres régionaux. L'activité scientifique de l'INRA s'articule autour de 13 départements scientifiques allant des mathématiques et informatique appliquées à la santé animale.
Compte tenu des spécificités de ses champs de recherche, l'INRA bénéficie d'un important dispositif expérimental qui prend la forme de 49 unités expérimentales réparties sur tout le territoire français. Ces unités sont constituées d'un dispositif agronomique spécifique (domaine agricole, installation d'élevage, écosystème naturel) et d'infrastructures d'expérimentations lourdes comme des parcs de serre, des animaleries, ou des halles technologiques.
Les unités expérimentales de l'INRA assurent un ensemble de fonctions au sein de l'institut qui font leur spécificité : collecte et caractérisation des ressources génétiques, production de données en appui à la recherche, observation de l'environnement, conception et démonstration de systèmes agricoles. En plus de l'apport en ressources issu de l'institut et des partenaires scientifiques
Illustration 1: Localisation du domaine expérimental d'Auzeville (en bleu) par rapport à la ville de Toulouse (en rouge)
et à la différence des unités de recherche, les unités expérimentales se financent en grande partie grâce à leurs recettes propres et à leurs prestations de service.
2. LE DOMAINE EXPÉRIMENTAL « GRANDES CULTURES » D'AUZEVILLE
L'unité expérimentale « grandes cultures » de l'INRA de Toulouse assure la gestion parcellaire et matérielle du domaine expérimental. Elle constitue une unité d'appui à la recherche et gère les dispositifs expérimentaux de grandes cultures pour les scientifiques du centre.
Le domaine expérimental représente 85 hectares de SAU. Les principales espèces qui y sont étudiées sont les céréales à paille (blé dur, blé tendre, triticale), le tournesol, le sorgho, le maïs, le pois et le soja. Elle exerce ses fonctions en partenariat avec un certain nombre de partenaires , scientifiques ou non : des unités mixtes de recherche de Toulouse, de Montpellier, de Clermont-Ferrand, des réseaux nationaux d'essais, ou encore le lycée agricole d'Auzeville.
Les activités de l'unité expérimentale s'axent autour de trois thématiques principales : l'amélioration des plantes, les intéractions génotype-milieu, et l'évaluation des systèmes de culture à bas niveau d'intrants. Elles sont exercées par une équipe « système de culture » (gestion de la surface agricole, du matériel et des intrants, gestion administrative, conduite des cultures, enregistrement des itinéraires techniques, etc.) et par une équipe « évaluation variétale » (gestion des expérimentations pour l'amélioration des plantes, homologation de nouvelles variétés, etc.).
3. LE SIG DU DOMAINE, RÉCENT MAIS DÉJÀ RICHE
Le domaine expérimental d'Auzeville est consacré aux grandes cultures. Depuis quelques années, l'unité porte la volonté de développer, au sein du domaine, des méthodes relevant de l'agriculture de précision. Cette orientation s'exprime à travers plusieurs initiatives. L'agriculture de précision tire profit de l’accessibilité et de la fiabilité grandissante des technologies de géo-positionnement. C'est dans ce contexte que l'unité a investit dans du matériel dédié sous la forme :
– de boîtiers GPS embarqués dans les tracteurs pour l'enregistrement des itinéraires techniques et pour l'auto-guidage par satellite ;
– de boîtiers GPS et de matériel dédié à l'arpentage pour le relevé de positions sur le terrain ; – d'une antenne RTK, en partenariat avec l'entreprise S@T-INFO, pour une correction
différentielle permettant une précision GPS centimétrique ;
– d'un boîtier GPS embarqué sur le semoir qui commande son déclenchement et enregistre les coordonnées des micro-parcelles ;
– d'un capteur de rendement sur la moissonneuse-batteuse accompagné d'un boîtier GPS pour enregistrer les valeurs de rendement géo-référencées à intervalles réguliers pendant la récolte.
En parallèle de cet investissement matériel, l'unité a fait l'acquisition de logiciels permettant le stockage, la gestion, et le traitement de ces données géographiques. Le choix s'est porté sur la solution d'ESRI ArcGIS, déjà utilisée par des laboratoires proches et partenaires, et aujourd'hui en version 10.1 sur les ordinateurs du domaine. C'est en 2009 que le système d'information géographique du domaine expérimental est mis en place au travers d'un stage dédié réalisé par Milène Legalle, étudiante du M2 SIGMA à Toulouse. Ce travail, accompagné d'une transmission de compétences en traitement et en maintenance, a établit les règles de stockage et d'organisation des données géographiques du domaine. Il a aussi largement contribué à la réalisation des fonds cartographiques de base : îlots et parcelles, repères historiques, passages d'irrigation, passages tracteurs, bandes enherbées, caractéristiques des sols, etc. (Legalle, 2009)
Ce développement s'est accompagné d'un effort de formation à la géomatique pour le directeur de l'unité et pour le responsable de l'équipe d'évaluation variétale : stockage, gestion et conversion des données, édition de plans et de cartes, édition de données attributaires, géo-traitements, interpolation de points sous Spatial Analyst...
Enfin, des initiatives plus ponctuelles ont enrichi le système d'information géographique du domaine : cartographie de la résistivité électrique du sol des parcelles du domaine et numérisation d'anciennes cartes, notamment.
Depuis 2011, l'unité expérimentale et ses partenaires scientifiques ont la volonté d'utiliser les techniques d'imagerie drone pour la caractérisation des cultures à l'échelle micro-parcellaire. Cette volonté s'est traduite par l'acquisition d'une dizaine d'ortho-mosaïques dans les longueurs d'onde du visible et du proche infrarouge. Les vols et le traitement des images (ortho-rectification et mosaïquage) sont réalisés par la start-up AirInov, spécialisée dans l'imagerie drone pour l'agriculture de précision (conseil d'apport en azote, suivi expérimental des essais). Dans la perspective de l'achat d'une aile volante (ou drone) à l'horizon 2014, l'unité expérimentale forme aujourd'hui deux de ses agents à sa manipulation et à son pilotage en partenariat avec AirInov.
TRAITEMENT
ESRI ArcGIS, logiciels constructeurs
BOITIER GPS D'ARPENTAGE GPS EMBARQUE SUR TRACTEURS GPS EMBARQUE SUR SEMOIR GPS ET CAPTEUR EMBARQUE SUR MOISONNEUSE-BATTEUSE ANTENNE RTK
S
IG
M
A
T
E
R
IE
L
Rendement Plan desmicro-parcelles Itinéraires techniques Limites parcellaires Relevés de terrain Assolements IMAGERIE SATELLITE IMAGERIE DRONE Données de phénotypage Trai tem ent d 'imag e Tra item en t d 'im ages
S
IG
L
O
G
IC
IE
L
IN
F
O
R
M
A
T
IO
N
G
E
O
G
R
A
PH
IQ
U
E
S
IG
R
A
S
T
E
II. L'AGRICULTURE DE PRÉCISION
1. ÉMERGENCE DU CONCEPT DANS LES ANNÉES 1980
Le concept d'agriculture de précision (AP) est né aux États-Unis dans les années 1980. Elle est née en réponse à une problématique conséquente de la modernisation de l'agriculture. Le recours croissant aux intrants (engrais, produits phyto-sanitaires, eau) impose de mieux gérer et d'optimiser leur utilisation afin de minimiser les risques pour l'homme et pour l'environnement (Zwaenepoel et Le Bars, 1997).
L'agriculture de précision consiste dans l’appréhension des variabilités intra-parcellaires. Elle conduit à la recherche d'informations sur ces dernières, principalement sous la forme d'analyses des caractéristiques physico-chimiques des sols, des composantes du rendement et de leur évolution (Zwaenepoel, 2000). Historiquement, l'homme a réagit à la variabilité spatiale des milieux en construisant un maillage de l'espace sous la forme de parcelles agricoles : une parcelle correspond à une conduite de culture spécifique (Guérif et King, 2007). L'agriculture de précision introduit cette même logique à une résolution de quelques mètres carrés. La connaissance des hétérogénéités intra-parcellaires permet d'envisager une modulation des techniques culturales (labourage, semis, intrants) à des fins d'économie ou d'amélioration du rendement.
Le concept s'est largement diffusé dans les années 1990 grâce aux innovations technologiques, notamment à travers les capteurs de rendement installés dans les moissonneuses-batteuses et couplés à des systèmes de positionnement GPS. Ces outils permettaient dès lors de réaliser une cartographie spatialement précise des hétérogénéités de rendement intra-parcellaires. D'une manière générale, l'agriculture de précision s'appuie fortement sur la technologie. Gilbert Grenier (ENITA Bordeaux) définit quatre outils indispensables à l'agriculture de précision : le moyen de localisation comme le GPS, le SIG comme outil de croisement des données spatiales, la géostatistique pour le traitement des données, et enfin les normes d'échange de données entre les différents systèmes d'information.
2. LE GÉO-POSITIONNEMENT, UNE TECHNOLOGIE CAPITALE POUR L'AP
Le géoréférencement des mesures et des actions effectuées dans la parcelle agricole est indispensable pour faire de l'agriculture de précision. C'est pourquoi le développement de l'AP est fortement corrélé à la démocratisation du GPS dans le monde. Le GPS, Global Positionning System, est développé à partir de 1978 pour les besoins de l'armée américaine. Il permet d'obtenir, à partir de la réception d'un signal sur la Terre, une localisation grâce à une constellation de satellites dédiés. La technologie n'est ouverte au public qu'en 1995, mais pour des raisons de sécurité, l'armée américaine impose une dégradation volontaire de la précision de 100 mètres.
Le GPS différentiel (DGPS) est une technologie mise au point pour contourner la dégradation volontaire de la précision. Grâce à un réseau de stations fixes de référence dont les coordonnées géographiques sont connues, elle permet d'ajuster la précision jusqu'à un ordre métrique. En 2000, l'armée américaine abandonne la dégradation volontaire de la précision, et le DGPS perd de son intérêt.
Cependant, une technologie dérivée du DGPS et fonctionnant sur le même principe fera son apparition pour permettre d'atteindre des précisions de l'ordre centimétrique : le RTK (Real Time Kinematic). Là encore, il s'agit de bases, dont la position est connue, qui transmettent les corrections au client. Il existe plusieurs réseaux de bases RTK. Elles peuvent être implantées par des utilisateurs, par des agences gouvernementales ou par des sociétés privées qui revendent les corrections.
Le site INRA d'Auzeville dispose d'une antenne de correction RTK implantée par la société S@t-Info. Cette antenne permet une correction différentielle en direct à travers le réseau satellite 3G (connexion internet). Avec cette technologie, la précision obtenue est de l'ordre de 2 centimètres.
3. IMAGERIE ET CARACTÉRISATION DES PARCELLES AGRICOLES
Sur le site du CNES, on peut lire que « dans les années à venir, la télédétection devrait tenir
une place très importante dans l'agriculture de précision, grâce aux capacités d'observation régulière des variations à l'intérieur des parcelles. Elle permettra notamment de déterminer les zones parcellaires et de fournir des informations aux stades-clés des cultures afin de mieux les gérer. »
L'imagerie multispectrale permet la caractérisation des états de vitalité et de santé de la végétation. Pour cela, la plupart des indices de végétation s'appuient sur la réponse spectrale spécifique dans les longueurs d'onde du proche infrarouge (forte réflexion par le parenchyme lacuneux) et du rouge (pic d'absorption de la chlorophyle). C'est le cas de l'indice de végétation le plus utilisé, le NDVI (indice de végétation par différence normalisée).
Des services spécifiques sont développés par les sociétés d'imagerie satellite, en particulier pour prodiguer des conseils d'apport en intrant aux agriculteurs. C'est le cas du service FARMSTAR, développé par la société Astrium. Service dédié à l'agriculture de précision et au pilotage de cultures, il combine analyse d'images satellites et expertise agronomique pour fournir des informations sur l'état des plantes. Il permet une meilleure gestion des besoins en engrais et en produits phyto-sanitaires. Aujourd'hui, le service FARMSTAR concerne 13 000 agriculteurs en France où il couvre plus de 600 000 hectares.
Plus récemment, le développement et la démocratisation des drones offrent de nouvelles possibilités pour la télédétection, notamment à finalité agricole. Les drones permettent de remédier à certaines lacunes des satellites :
– la résolution spatiale, inférieure au centimètre lors des vols les plus bas ;
– la résolution temporelle incomparable et indépendante de la couverture nuageuse ; – une certaine souplesse d'utilisation ;
– un coût de moins en moins élevé.
Les drones dédiés à l'agriculture, le plus souvent des ailes volantes d'une envergure de 2 à 3m, embarquent une charge utile composée d'une batterie, d'un auto-pilote, d'un capteur GPS, d'un modem, et d'un capteur dans les longueurs d'onde du visible ou du multispectral. Les drones tricoptères ou hélicoptères peuvent embarquer des charges utiles plus importantes, et donc supporter le poids de capteurs thermiques ou de LIDAR.
Dans le cadre des activités du domaine expérimental, un certain nombre d'acteurs interviennent dans le domaine de l'imagerie drone.
La société AirInov, spécialisée dans l'agriculture de précision, fournit des données images sous la forme d'ortho-mosaïques, et propose des solutions de conseil en apport d'intrants et de suivi expérimental adapté à la recherche agronomique. Le drone utilisé est une aile volante d'une envergure de 2m qui peut voler très bas
(80m) pour atteindre des résolutions en dessous du centimètre. Cependant, il dépasse difficilement Illustration 3: Drone de la société AirInov
les 40mn d'autonomie. Particulièrement compétente dans le traitement des données et soucieuse de l'amélioration de ses capteurs, la société travaille avec des laboratoires de l'INRA d'Avignon pour développer des algorithmes adaptés. En pratique, elle constitue également le fournisseur principal de données du domaine expérimental.
La société Delair-Tech, issue du secteur pétrolier et basée à Toulouse, développe aujourd'hui ses activités dans le domaine agricole qui ne figure pas parmi ses spécialités. Elle a l'avantage de disposer de compétences aéronautiques plus abouties. Son drone est capable de voler plus haut et pendant plusieurs heures. Les compétences en matière de traitement des données y sont plus modestes, mais elle bénéficie du développement d'un partenariat avec la PME toulousaine Magellium, hautement spécialisée dans le traitement d'image à destination des secteurs de la défense et de l'industrie.
Bien que les acteurs de l'imagerie drone soient encore peu nombreux, la diversité des solutions d'ores et déjà disponibles illustre la souplesse de cette technologie.
III. CARTOGRAPHIE DES RENDEMENTS
AGRICOLES
1. LA CARTOGRAPHIE DE RENDEMENT : LE POINT D'ENTRÉE DE LA DÉMARCHE D'AP
La réalisation de cartes de rendement est essentielle au déploiement d'une agriculture de précision. Elle permet de rendre compte des hétérogénéités intra-parcellaires. Les cartes de rendement expriment le résultat final d'une conduite de culture (Berducat et Boffety, 2000) selon des paramètres environnementaux (caractéristiques du sols, exposition à la lumière, exposition aux adventices ou aux maladies...). Dans le contexte d'un domaine expérimental, elles représentent également un intérêt dans le placement des essais et des protocoles expérimentaux. La réalisation des premières cartes de rendement date du début des années 1990 et de l'apparition des premières moissonneuses-batteuses à capteurs de rendement. Avec le temps, les capteurs se sont perfectionnés en même temps que les technologies de géo-positionnement.
Dans l'unité expérimentale, les cartes de rendement sont, le plus souvent, réalisées par le directeur de l'unité. Les données brutes de la moissonneuse-batteuse sont récupérées depuis une carte SD, puis elles sont copiées dans une feuille Excel qui convertit les données en une table compréhensible. Ces dernières sont ensuite enregistrées dans une nouvelle feuille Excel pour être chargée dans le logiciel ArcGIS. Le fichier de points ainsi crée doit alors subir une série traitements : reprojection, suppression des points aberrants, suppression des erreurs, classification, interpolation, cartographie et enfin mise en page. La lourdeur de la procédure et son exigence en matière de traitement freinent l'exploitation de ces données précieuses. Les cartes sont réalisées tardivement après la récole, ce qui limite leur rôle dans l'analyse des résultats des conduites de culture. De plus, seules quelques parcelles peuvent être cartographiées.
Dans le cadre de mon stage, l'objectif est d'abord de réaliser les cartes de rendement de la campagne 2012, étant donné que seules une dizaine d'entre elles ont pu l'être jusqu'à présent. Il est aussi convenu que l'optimisation des méthodes de cartographie du rendement constitue un objectif secondaire et exploratoire. L'objectif final est que les cartes puissent être produites dans des délais relativement courts et avec une difficulté moindre.
2. LES DONNÉES UTILISÉES
Au domaine expérimental, le capteur de rendement de la moissonneuse-batteuse est couplé à un boîtier GPS dont la précision est de l'ordre de 2cm. L'antenne GPS étant située sur le haut de la machine, des imprécisions dues à la bascule de l'appareil peuvent néanmoins apparaître. A intervalle régulier, le capteur enregistre une série de données pour une localisation géographique donnée : largeur de coupe, rendement instantané, rendement total, humidité, heure.
Avant chaque récolte, la moissonneuse-batteuse est recalibrée par les agents afin de limiter les erreurs. Selon les campagnes, on constate des écarts plus ou moins importants entre les chiffres du capteur et ceux de la pesée. Ces écarts s'expliquent par …
Enfin, les données issues de la moissonneuse-batteuse peuvent être comparées aux relevés de terrain effectués sur les parcelles.
3. CONVERSION DES DONNÉES BRUTES
De premier abord, les fichiers issus de la moissonneuse-batteuse sont incompréhensibles. La documentation et le travail d'un précédent stagiaire permettent néanmoins de convertir le fichier en
une table lisible : choix de l'élément séparateur, conversion dans les unités communes, suppression et addition d'en-têtes.
Pour plus de simplicité, une macro Excel a été écrite pour permettre de convertir automatiquement n'importe quel fichier issu de la moissonneuse-batteuse. Les points aberrants sont également supprimés : ceux dont la valeur de rendement est nulle, ainsi que ceux dont la largeur de coupe n'est pas égale à 4 mètres.
La table en sortie est construite de manière à être compatible avec les logiciels SIG afin qu'elle puisse y être intégrée par la suite.
Illustration 5: Le fichier brut issu de la moissonneuse-batteuse
4. MÉTHODE D'INTERPOLATION DES DONNÉES DE RENDEMENT
Les données de rendement sont acquises, grâce au capteur de la moissonneuse-batteuse, sous la forme de points géo-référencées et accompagnés d'une série de mesures. La représentation fidèle des variations de mesure serait la graduation de la symbologie des ponctuels en fonction de leur valeur de rendement.
Cette méthode de cartographie, au plus proche de la réalité de la mesure, n'est pas la plus représentative du milieu. On distingue avec une certaine difficulté les différentes zones de rendement. De plus, le rendement d'une partie de la surface cultivée n'est pas représentée puisqu'elle est sans information. Pour palier ces manques, on réalise une interpolation des données ponctuelles.
Les méthodes d'interpolation cartographique, principalement issues de travaux du domaine de la géologie, prédisent des valeurs de surfaces à partir d'un nombre limité de valeurs ponctuelles. Elle produit ainsi, à partir de mesures ponctuelles, des valeurs de surfaces continues. La réalisation de cette opération convertit des entités ponctuelles en un raster composé de cellules dont la valeur (donc leur représentation graphique : leur couleur) dépend du traitement d'interpolation appliqué.
Parmi les différentes méthodes d'interpolation, on distingue les méthodes déterministes des méthodes géostatistiques. A partir des mesures environnantes, les méthodes d'interpolation déterministes attribuent une valeur de prédiction aux cellules selon une formule mathématique spécifiée. Les méthodes géostatistiques intègrent des modèles statistiques complexes (par auto-corrélation, notamment) qui imposent une connaissance sérieuse du processus étudié pour leur Illustration 7: Graduation symbologique des points de mesure en fonction de leur valeur de rendement
paramétrage. Elles ont, à la différence des méthodes déterministes, l'avantage de renseigner sur le degré d'exactitude des valeurs de prédiction calculées (Goodchild, de Smith, et Longley, 2012),
Parmi les méthodes d'interpolation les plus utilisées, on distingue notamment :
– La méthode IDW (Pondération par l'inverse de la distance) qui calcule les valeurs des cellules par la moyenne des mesures environnantes. Plus la mesure est proche, plus elle a d'influence sur la valeur calculée : c'est pourquoi on parle de pondération.
– La méthode du krigeage, qui constitue une méthode géostatistique avancée permettant de générer une surface à partir d'un ensemble de points.
– La méthode par voisins naturels, qui sélectionne l'échantillon de mesures le plus proche de la cellule pour en interpoler les valeurs.
– La méthode Spline, dont la fonction mathématique réduit la courbure des surfaces pour restituer des surfaces plus lisses.
Selon les méthodes d'interpolation, le raster obtenu peut varier fortement. Les différences constatées dépendent du degré d'inconnu (plus l'information est disponible, moins les valeurs de prédiction diffèrent selon les algorithmes), de la taille des cellules, du lissage, ou encore des corrections apportées par certains algorithmes.
La comparaison entre deux méthodes d'interpolation déterministes montrent que, si la représentation diffère, ce sont les mêmes zones homogènes qui apparaissent pour l'analyste. Dans le cas du domaine expérimental d'Auzeville, le choix se porte sur la méthode IDW, supportée par la plupart des logiciels et déjà éprouvée par de précédents travaux dans l'unité expérimentale.
5. AUTOMATISATION DU TRAITEMENT GÉOMATIQUE
Pour la réalisation de leur cartographie, les données de rendement doivent subir une série de géo-traitements sous logiciel SIG. Au domaine expérimental, c'est le logiciel ArcGIS qui est utilisé. Pour un usage simplifié, on utilise le Model Builder d'ArcGIS. Model Builder est un outil intégré à la solution ArcGIS. A travers l’élaboration de modèles, il permet la création de nouveaux outils. Un modèle consiste en une séquence d’outils de géo-traitements enchaînés. Il permet par exemple de réaliser une chaîne d’outils issus de la Boîte à Outils pour une couche donnée. L’utilisation
combinée d’itérations permet d’effectuer des traitements répétés pour des ensembles importants de fichiers. L'objectif final est le suivant : les traitements doivent être appliqués automatiquement sans
Illustration 8: Interpolation par la méthode IDW Illustration 9: Interpolation par la méthode du voisin le plus proche
intervention de l'utilisateur, qui n'aura à renseigner que quelques champs avant l’exécution du modèle (année de campagne, répertoire de travail).
Illustration 10: Exemple d'un modèle ArcGIS Model Builder
D'un point de vue technique, deux solutions sont envisageables pour traiter le problème :
– réaliser un modèle qui, à partir d'une table Excel en entrée, en réalise automatiquement la cartographie ;
– ou réaliser un modèle qui, à partir d'un répertoire en entrée (donc une série de tables Excel), en réalise automatiquement les cartographies.
Dans un premier temps, la seconde solution est retenue car elle semble plus apte à traiter la campagne 2012. Toutes les données sont disponibles et le choix paraît évident. Un modèle est donc créé en ce sens. Dans un second temps, avec les premières récoltes de la campagne 2013, la pratique démontre l'incommodité de cette méthode : toutes les données ne sont pas disponibles en même temps. De plus, selon le type de culture, les dates d'acquisition des données peuvent différer de plusieurs mois. Le modèle est donc revu pour satisfaire la première solution. L'objectif à l'usage est le suivant : après chaque récolte, on exécute la macro Excel pour convertir les données, puis le modèle ArcGIS pour leur traitement géomatique.
Le résultat final est la mise à disposition de deux modèles accompagnés de leur guide d'utilisation d'une quinzaine de pages. Le premier modèle consiste dans la création automatisée, en fonction de paramètres d'entrée, d'une arborescence de répertoires destinée à accueillir certains fichiers d'entrée, les fichiers intermédiaires et les fichiers en sortie. Le second exécute, pour une parcelle donnée, la série de géo-traitements jusqu'à la création du raster d'interpolation.
Le modèle nécessite le renseignement de trois variables en entrée :
– la feuille Excel correspondant à la conversion du fichier brut issu de la moissonneuse-batteuse ;
– l'année de la campagne pour déterminer les fichiers références (parcellaire, assolements) et les variables dans le chemin et le nom des différents fichiers ;
– l'espace de travail, répertoire à l'intérieur duquel à été exécuté le modèle de création d'arborescence.
Il exécute les traitements successifs suivants :
– compilation d'une table X,Y à partir de la feuille Excel ; – extraction des entités non-aberrantes ;
– enregistrement du shapefile ponctuel ; – reprojection en Lambert 93 ;
– jointure spatiale avec le parcellaire pour les champs correspondant au code de la parcelle et à son assolement ;
– suppression des champs inutiles ;
– enregistrement du shapefile final et renommé selon des variables obtenus au long du traitement (code parcelle, assolement, campagne) ;
– interpolation IDW ;
– découpage du raster d'interpolation en fonction du polygone correspondant à la parcelle. Le modèle complet est disponible en annexe. Une description plus complète des modèles a également été réalisée dans le cadre de la rédaction du guide d'utilisation (sommaire en annexe).
6. ÉDITION ASSISTÉE DE LA CARTE
A l'issue des géo-traitements automatisés, les fichiers de sortie sont nus de toute symbologie. Pour l'édition d'une carte de rendement, l'histogramme du raster d'interpolation doit être classifié. Plusieurs méthodes de classification sont supportées par le logiciel ArcGIS : méthode manuelle, méthode des intervalles égaux, méthode des intervalles à amplitude définie, méthode des effectifs égaux, méthode des seuils naturels, etc.
Par commodité et par soucis d'opérabilité, c'est la classification par seuils naturels qui est choisie. La méthode des seuils naturels, aussi appelée méthode de Jenks, identifie les classes d'un histogramme de données en fonction de regroupements naturels. Il identifie les interruptions de classes afin d'optimiser la classification des données (Goodchild, de Smith, et Longley, 2012). L'inconvénient est que les seuils naturels constituent une classification spécifique à chaque carte. Par conséquent, ils ne permettent pas de comparer plusieurs cartes créées à partir de données différentes. Cependant, l'objectif est d'identifier les hétérogénéités intra-parcellaires et la méthode des seuils naturels est celle qui les fait le mieux apparaître.
Dans l'objectif de permettre aux agents d'éditer rapidement des cartes de rendement, un projet ArcMap est enregistré et transmis. Ce projet contient les couches de références (BD Ortho, parcellaire) nécessaires à la représentation cartographique, ainsi qu'une mise en page pré-enregistrée. Il contient aussi une couche d'index qui permet l'utilisation de l'outil ArcGIS Pages Dynamiques. Cet outil, pré-configuré, indexe l'ensemble des parcelles et l'emprise correspondante. Il permet ainsi de naviguer entre les différentes parcelles et, selon l'objet, de mettre automatiquement à jour des champs de référence sur la carte : nom de la parcelle, type de culture...
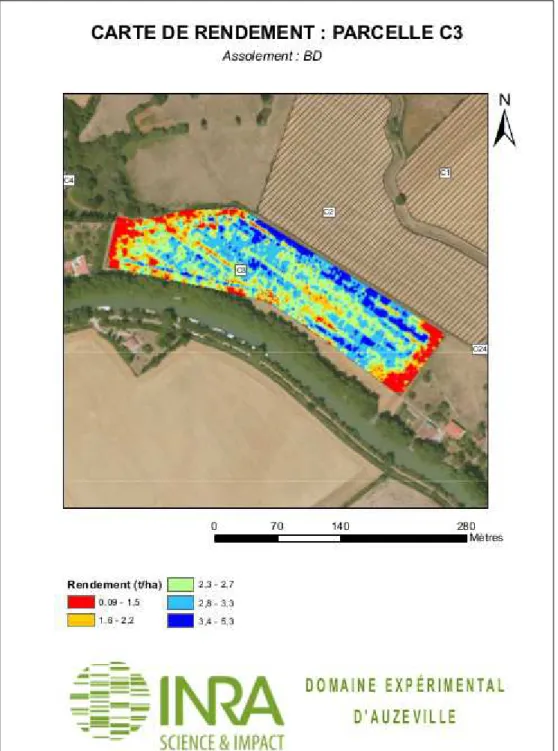
7. RÉSULTAT
Le couplage de différents leviers d'automatisation et d'assistance (Macro Excel, Modèle ArcGIS, pré-configuration d'outils d'assistance ArcGIS) permet d'optimiser les délais de réalisation des cartes de rendement. A l'usage, la méthode permet d'éditer les cartes d'une dizaine de parcelles en un peu plus d'une demie-heure. Le résultat est un export au format image ou PDF de la carte. Une campagne de récolte du domaine expérimental représente l'édition de 50 cartes de rendement. Un échantillon est disponible en annexe.
IV. CARACTÉRISATION DES PARCELLES DE
BLÉ PAR ANALYSE D'IMAGES SATELLITES
1. TAKE5, DERNIÈRE MISSION DE SPOT4
Dans l'objectif de valoriser les fins de vie des satellites, le CNES lance régulièrement des appels à propositions pour mener de courtes expériences pendant les derniers mois précédant leur désorbitation. Désorbité au cours de l'été 2013, SPOT4 a été utilisé de janvier à juin dans le cadre du projet Take5, imaginé et proposé par le CESBIO de Toulouse.
Le projet Take5 a été pensé dans une perspective de préparation à l'utilisation des données produites par la mission Sentinel-2 de l'ESA. Cette mission, dont le lancement est prévu pour 2014, consiste dans le lancement de deux satellites, dans la continuité des missions SPOT et Landsat, dont le rôle sera de délivrer des images optiques haute-résolution : 13 bandes spectrales, et 10m de résolution pour les 4 premières bandes. La particularité de la mission Sentinel-2 réside avant tout dans sa résolution temporelle de cinq jours. En prenant en compte les aléas climatiques, l'importance de celle-ci permettra aux utilisateurs de disposer, au minimum, d'une prise de vue par mois pour sa zone.
Dans le cadre du projet Take5, l'orbite de SPOT4 a ainsi vu son orbite modifié en janvier pour simuler la résolution temporelle de Sentinel-2, soit un cycle de cinq jours. Cette perspective présente-t-elle un intérêt, au domaine expérimental, pour l'analyse et la caractérisation des parcelles de blé dur ?
2. LIMITES DE LA DONNÉE ET OBJECTIFS DE L'ÉTUDE
Les images satellites constituent une source importante de données pour les producteurs agricoles. Cependant, le domaine expérimental présente des particularités qui le différencient des parcelles traditionnelles. D'abord, les parcelles expérimentales présentent des superficies moins importantes. Pour certains essais, certains champs ne dépassent pas les 30m en largeur. Compte tenu de la taille des pixels issus de SPOT4 (20m sur 20m), on ne pourra analyser ces parcelles qu'au travers de mixels, c'est-à-dire de pixels ayant enregistré une valeur correspondant à plusieurs milieux différents ; ici, du champ et de la route, ou deux portions de deux champs différents. Les valeurs de ces pixels ne peuvent
pas être exploitées dans le cadre d'une analyse précise dont on devra exclure les parcelles les plus petites.
Malgré une résolution temporelle de cinq jours, de nombreuses prises de vue au niveau du site d'Auzeville ne sont pas exploitables à cause des conditions atmosphériques. Au mois de mai, aucune des images acquises n'a pu être correctement corrigée. Dans un contexte d'analyse des temporalités culturales, on regrettera de n'avoir aucune donnée à exploiter entre le 13 avril et le 12 juin, qui constitue a fortiori une période-clé dans les cycles du blé dur.
Illustration 12: Mixels inexploitables (en rouge)
Au regard de ces obstacles, on peut au final se poser la question de la fiabilité d'une telle source de données dans le cadre d'une analyse fine de parcelles de faible superficie.
Compte tenu des limites de la donnée à disposition, le premier objectif est de réaliser un traitement qui s'affranchit au maximum des imprécisions. Dans un second temps, des analyses à deux niveaux peuvent être menées : une première analyse au niveau parcellaire, et une seconde capable de rendre compte des hétérogénéités intra-parcellaires.
3. TRAITEMENT DES DONNÉES
Au final, sur la période de janvier à juin 2013, on parvient à constituer une sélection de cinq images : 17 février, 4 mars, 29 mars, 13 avril, et 12 juin. Les données sont disponibles à intervalles réguliers du 17 février jusqu'au 13 avril. Cependant, entre le 13 avril et le 12 juin, aucune donnée n'est disponible.
La série de traitements est opérée dans le logiciel open source de traitement d'image Monteverdi, puis dans ArcGIS. Après avoir découpé la zone d'intérêt pour alléger les différents traitements, l'objectif est de calculer, pour chaque date, un indice de végétation. Dans cette étude, on utilise l'indice le plus connu : le NDVI (différence normalisée de l'indice de végétation).
Pour chaque pixel de l'image, le NDVI est calculé selon la formule suivante, soient PIR la valeur numérique du pixel sur la bande correspondant au proche infrarouge, et R la valeur numérique du pixel sur la bande du rouge :
NDVI = ( PIR – R ) / ( PIR + R )
En sortie de ce traitement, on obtient donc un nouveau raster mono-bande (le plus souvent représenté en niveau de gris) qui contient, pour chaque pixel, la valeur du NDVI.
Les images satellites ne sont pas spécifiquement destinées à des études à cette échelle. Pour cette étude, compte tenu de la volonté de mener une analyse diachronique et de la finesse de l'échelle, le géo-référencement des rasters doit être ajusté avant de continuer les traitements. L'objectif est que les pixels des cinq images correspondent à la même portion de champ, sans quoi les variabilités constatées ne seront qu'illusoires.
Compte tenu du problème posé par les pixels mixtes, on applique aux polygones des parcelles étudiées une zone tampon négative de 20m, soit la largeur d'un pixel issu de SPOT4. Ce traitement permet de limiter la zone d'étude aux portions de champ non-concernées par le problème. De fait, il écarte également les parcelles les plus étroites de l'étude. On peut ensuite, par un simple calcul statistique, calculer la moyenne des valeurs du NDVI au sein d'une parcelle.
En ce qui concerne l'échelle intra-parcellaire, on utilise l'échelle du pixel. Après suppression des pixels mixtes, la couleur de chaque pixel est graduée selon sa valeur. Cette représentation permet d'analyser les hétérogénéités à l'intérieur des parcelles.
4. ANALYSE DE L'ÉVOLUTION DES PARCELLES
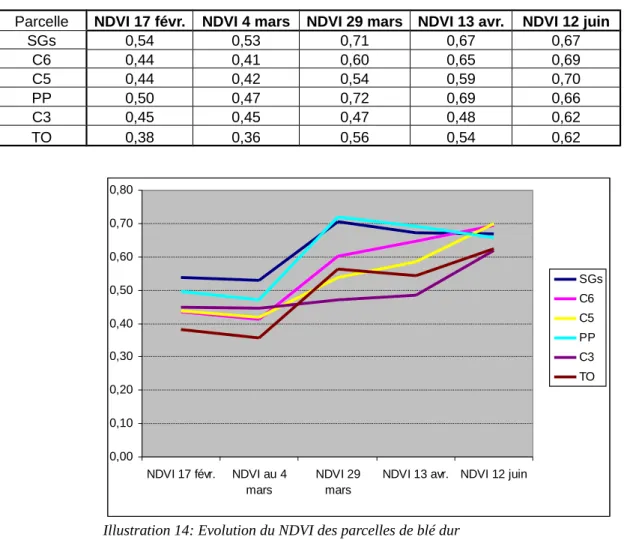
La première échelle d'analyse est l'échelle parcellaire. Cette analyse porte sur les valeurs de l'indice de végétation pour chaque date et pour chaque parcelle. Les traitements précédents permettent d'obtenir le tableau de valeurs suivant, accompagné de sa représentation graphique :
Parcelle NDVI 17 févr. NDVI 4 mars NDVI 29 mars NDVI 13 avr. NDVI 12 juin
SGs 0,54 0,53 0,71 0,67 0,67 C6 0,44 0,41 0,60 0,65 0,69 C5 0,44 0,42 0,54 0,59 0,70 PP 0,50 0,47 0,72 0,69 0,66 C3 0,45 0,45 0,47 0,48 0,62 TO 0,38 0,36 0,56 0,54 0,62
L'analyse du graphique permet l'observation de plusieurs tendances : – le NDVI augmente globalement pour chaque parcelle de février à juin ; – le NDVI semble plafonner aux alentours de 0,70 ;
– la variabilité des valeurs est importante en mars, et faible en juin ; – le NDVI baisse entre le 17 février et le 4 mars ;
– le NDVI croît considérablement pendant le mois de mars.
La tendance de l'augmentation globale du NDVI est la confirmation que le traitement d'image n'a pas produit de valeurs aberrantes. Le plafonnement de la valeur du NDVI aux alentours de 0,70 correspond, en pratique, à la maturation des blés. L'analyse des courbes permet de constater que certaines parcelles sont plus précoces que d'autres, notamment PP et SGs. Au contraire de ces dernières, les parcelles C6 et C5 n'atteignent leur valeur maximale qu'en juin. Du point de vue du rendement, on peut supposer que les parcelles C3 et TO auront des résultats plus mauvais que les autres.
Les connaissances des agents du domaine et les chiffres du rendement confirment ces Illustration 14: Evolution du NDVI des parcelles de blé dur
0,00 0,10 0,20 0,30 0,40 0,50 0,60 0,70 0,80 NDVI 17 févr. NDVI au 4 mars NDVI 29 mars
NDVI 13 avr. NDVI 12 juin
SGs C6 C5 PP C3 TO
tendances. Les chiffres de la parcelle TO sont en fait faussés par la présence d'un essai en son centre : la baisse du NDVI entre le 29 mars et le 13 avril pourrait correspondre à des prélèvements opérés par les techniciens. Le rendement de la parcelle C3 est parmi les plus mauvais en raison d'une inondation au printemps. Enfin, les agents confirment que les parcelles SGs et PP ont été plus précoces que les autres, et leurs chiffres attestent des meilleurs rendements.
La baisse du NDVI entre le 17 février et le 4 mars ne correspond pas à une observation habituelle des cycles du blé dur. Pour trouver la réponse à ce phénomène, les données satellites doivent être croisées avec les données climatiques enregistrées par la station météo d'Auzeville.
L'étude de cette courbe permet d'observer qu'entre fin février et mi-mars, de nombreuses journées ont vu la température descendre en dessous de zéro. C'est cette période de gel qui fait reculer le NDVI tandis qu'en temps normal, il augmente sur cette période. L'augmentation brutale des températures mi-mars correspond également à une hausse du NDVI entre le 4 et le 29 mars.
5. ANALYSE DES HÉTÉROGÉNÉITÉS INTRA-PARCELLAIRES
La résolution spatiale de SPOT4 permet de mener des analyses de l'évolution des parcelles de blé dur les plus grandes à l'échelle intra-parcellaire. Cette analyse se mène, en fait, à l'échelle du pixel. Les variabilités spatiales sont analysées par la représentation graduée de la valeur de chaque pixel. Pour les besoins de l'étude, une série de cartes est éditée pour chaque parcelle étudiée. La représentation du pixel va du bleu (valeur du NDVI entre 0 et 0,3) au rouge le plus vif (valeur du NDVI entre 0,7 et 1). Elle est harmonisée entre les cartes des différentes parcelles pour permettre des comparaisons plus intuitives. Pour l'exemple, on se limite à l'étude de la parcelle C5. Les cartes correspondant aux autres parcelles étudiées sont disponibles en annexe.
Illustration 15: Evolution du minimum de température de la journée entre février et juin 2013 (source : station météo d'Auzeville) T Min -5,0 0,0 5,0 10,0 15,0 20,0 25,0 01/0 2/20 13 08/0 2/20 13 15/0 2/20 13 22/0 2/20 13 01/0 3/20 13 08/0 3/20 13 15/0 3/20 13 22/0 3/20 13 29/0 3/20 13 05/0 4/20 13 12/0 4/20 13 19/0 4/20 13 26/0 4/20 13 03/0 5/20 13 10/0 5/20 13 17/0 5/20 13 24/0 5/20 13 31/0 5/20 13 07/0 6/20 13 14/0 6/20 13 21/0 6/20 13 28/0 6/20 13 T Min
C5
C6
0 75 150 300
Mètres
EVOLUTION DE LA VALEUR DU NDVI
DANS LA PARCELLE C5 (BLÉ DUR)
Légende : NDVI Elevée : 0,8 Faible : 0,2
Au 17 février
Au 12 juin
Au 13 avril
Au 29 mars
Au 4 mars
L'observation de cette série de cartes permet d'abord de saisir les tendances parcellaires révélées par la première étude. A l'échelle intra-parcellaire, on observe une zone de meilleure qualité agronomique dans le coin Nord-Ouest de la parcelle, qui se répète pour les quatre premières dates. Dans une moindre mesure, les données du 29 mars et du 13 avril mettent en évidence une nouvelle zone de qualité au sud de la parcelle.
Les fortes hétérogénéités constatées en février, en mars, et en avril sont gommées en juin à l'issue de la maturation des blés. Au contraire, on observe que le NDVI des zones les plus précoces sont aujourd'hui les zones où le NDVI est le plus bas : arrivés à maturation plus tôt, les blés ont ici atteint le maximum de leur activité photosynthétique plus tôt.
6. COMPARAISON AVEC LES CARTES DE RENDEMENT ET DE RESISTIVITÉ DES SOLS
La résistivité du sol est l'inverse de sa conductivité. Les mesures sont réalisées grâce à un appareil tracté équipé de capteurs et de boîtiers GPS pour le géo-référencement des données. Les zones à forte résistivité correspondent, le plus souvent, à des sols compactés et argileux : plus la valeur de résistivité est forte, moins le milieu est favorable.
Dans l'exemple de la parcelle C5, il est difficile de faire le lien entre les deux cartes. Quant aux cartographies issues de l'imagerie satellite, elle ne fait pas non plus apparaître de régularités particulières. Ce constat démontre la nécessité de mener une véritable analyse agronomique des hétérogénéités spatiales, révélées par les différentes cartographies, afin d'estimer la fiabilité des différentes données.
7. PERSPECTIVES
L'étude menée sur les parcelles de blé dur du domaine expérimental démontre que, malgré Illustration 17: Carte de résistivité des sols de la parcelle C5 (Réal. : domaine expérimental, 2011)
une résolution de 20m, les images satellites constituent des données pertinentes pour l'analyse agronomique. La résolution temporelle du satellite SPOT4 dans le cadre du projet Take 5 (5 jours au lieu de 26) est essentielle. Elle permet de mener des analyses diachroniques portant sur l'évolution des états d'activité photosynthétique des plantes. Malgré le contexte défavorable d'un mois de mai 2013 particulièrement pluvieux, les interprétations sont pertinentes.
Lancée à l'horizon 2014, la mission Sentinel-2, qui propose une résolution temporelle identique pour une résolution spatiale deux fois plus précise, offre une perspective intéressante de phénotypage pour les parcelles du domaine expérimental.
V. ÉLABORATION D'UNE MÉTHODE DE
COMPTAGE DES TOURNESOLS PAR
TRAITEMENT D'IMAGES DRONES
1. UN TRAVAIL INSCRIT DANS UNE DYNAMIQUE DE DÉVELOPPEMENT DE L'IMAGERIE
Dans le cadre de la mise en place et du suivi des essais, les champs expérimentaux sont divisés en micro-parcelles. A l'intérieur de ces micro-parcelles varient généralement la variété de la plante ou la nature de la conduite de culture (intrants). Pour rendre compte des résultats des essais, des comptages au sol sont réalisés par les agents. L'objectif est d'obtenir le nombre de tournesols pour chaque micro-parcelle. Ces résultats peuvent également être utilisés, comme aide à la décision, pour l'apport d'intrants.
Coûteuse en temps et mobilisatrice d'un grand nombre d'agents, l'opération est également confrontée à des difficultés de terrain à mesure que les plantes poussent. Pour parvenir à une plus grande efficacité et dans le cadre d'activités de phénotypage « haut-débit », le domaine expérimental souhaite développer des méthodes de comptage des tournesols par traitement d'images drones.
En parallèle, ce travail permet d'effectuer un balayage des solutions logicielles de traitement d'image adaptées, ainsi qu'une transmission de compétences à travers la rédaction d'un mode opératoire visant à documenter les différents traitements utilisés.
D'une manière plus générale, ce travail s'inscrit dans une série d'initiatives préparatoires à l'acquisition, par le domaine expérimental, de son propre drone à l'horizon 2014.
2. LES DONNÉES SOURCES
L'espace étudié pour ce travail est une parcelle expérimentale de tournesols, mise en place dans le cadre du projet Sunrise et en partenariat avec l'institut technique en charge des cultures oléagineuses, le CETIOM. Le projet Sunrise vise à stimuler le progrès génétique du tournesol, une culture « adaptée à un contexte de changement climatique » selon le site du projet.
Les données sont produites par la société AirInov, spécialisée dans l'imagerie drone pour l'agriculture. Les images sont résolues à 0,8cm grâce à un vol réalisé à une altitude inférieure à 100m.
La prise de vue est datée du 17 mai 2013, date à laquelle les tournesols étaient suffisamment levés pour une détection optimale, mais encore assez jeunes pour éviter le recouvrement entre les plants. Elle a été réalisée dans les longueurs d'onde du visible : rouge, vert et bleu.
3. DE LA PRISE DE VUE À L'ORTHO-MOSAÏQUE
Les données sont livrées sous la forme d'un fichier image correspondant à l'ortho-mosaïquage des différentes prises de vue. Pour évaluer la précision et la fiabilité des données, il convient d'en comprendre la procédure. En imagerie drone, l'ortho-mosaïquage s'appuie sur une série de métadonnées produites par les différents capteurs à chaque prise de vue : heure de la prise de vue, position GPS sans correction différentielle, roulis, tangage, lacet. De plus, les prises de vue sont réalisées avec un recouvrement proche des 70 % : un point d'une image peut être photographié des dizaines de fois par le capteur.
l'ordre de plusieurs centaines selon la résolution spatiale. Pour réaliser leur ortho-mosaïquage, une application procède, dans un premier temps, au positionnement des différentes images (pour une parcelle expérimentale : d'une centaine à plusieurs centaines selon la résolution spatiale) selon les coordonnées géographiques qui lui sont associées.
La deuxième étape consiste dans l'alignement des images, aussi appelé mosaïquage. Cette opération est permise par un fort taux de recouvrement des prises de vue, et s'appuie sur la détection de points d'intérêts. Les algorithmes de détection de points d'intérêts, repèrent des objets similaires entre plusieurs images (un arbre, ou un point quelconque).
Une fois le mosaïquage effectué, on procède à ortho-rectification des images qui permet leur correction géométrique. La procédure d'ortho-rectification est permise par la production de métadonnées diverses, en particulier celles qui permettent d'évaluer l'altitude, le roulis, le tangage et le lacet3 associés à chaque prise de vue. Le MNT4 nécessaire à toute procédure d'ortho-rectification
est construit par le logiciel grâce au recouvrement entre les images.
4. LES SOURCES D'IMPRÉCISION ET D'ERREURS
Devant l'imagerie satellite, l'imagerie drone présente une série d'avantages incontestables. Cependant, elle recèle encore certaines imperfections dont il faut avoir conscience lorsqu'on travaille sur ce type de données. La plupart des faiblesses des drones sont liées à la charge utile qu'ils sont capables, ou non, de supporter. Par conséquent, ils ne sont pas embarqués de capteurs aussi performants que les satellites.
La première imprécision est radiométrique. Elle est due à la nature des capteurs optiques embarqués dans le drone. Ces capteurs sont, le plus souvent et notamment pour le drone AirInov, des appareils photographiques numériques vendus dans le commerce et sont avant tout choisis pour leur poids. S'ils sont souvent très résolus et produisent généralement des images aux alentours de 5M de pixels, la qualité de la radiométrie n'est pas aussi fiable que celle des satellites.
De plus, contrairement à une image satellite qui correspond à une seule prise de vue, les ortho-mosaïques produites par l'imagerie drone correspondent à plusieurs prises de vue. Dans les faits, cette pratique multiplie le risque d'erreurs radiométriques par irrégularités de captation.
Les mesures radiométriques sont également altérées par une luminosité encore mal gérée. Outre les situations de sur-exposition ou de sous-exposition qui faussent les valeurs, les variations les plus délicates à gérer sont liées à la durée du vol durant lequel les prises de vue ont été réalisées. Pour photographier une parcelle agricole expérimentale, un drone s'envole pour 20 à 45mn selon la résolution souhaitée. Pendant ce laps de temps, il est rare que les conditions d'ensoleillement soient constantes. Or, ces variations ne sont pas gérées par les techniques d'ortho-mosaïquage les plus utilisées en imagerie drone. Cependant, le problème est destiné à être solutionné par l'arrivée sur le marché de capteurs de luminosité plus légers. Certains drones en embarquent déjà.
Enfin, une imprécision est également produite par les mesures GPS. Les boîtiers embarqués sur les drones procèdent encore rarement à une correction différentielle des coordonnées enregistrées. Bien que des capteurs permettent d'ajuster les mesures d'altitude en raison de son importance pour l'ortho-rectification, les mesures de longitude et de latitude sont imprécises et se traduisent par un géo-référencement de l'ortho-mosaïque parfois approximatif, notamment en comparaison des échelles de travail induites par les résolutions spatiales de l'imagerie drone.
3 Les termes de roulis, de tangage et de lacet sont des termes de dynamique de vol parfois plus connus sous leur forme anglaise : yaw, pitch and roll.
5. EXPLORATION DES SOLUTIONS LOGICIELLES
Le traitement d'image est une activité nouvelle au domaine expérimental ainsi que dans les unités de recherche partenaires. Jusqu'ici, les premières approches ont été réalisées sous ArcGIS grâce à l'extension Spatial Analyst. L'approfondissement des techniques de traitement d'image nécessite néanmoins l'acquisition de logiciels dédiés. Un état des solutions logicielles disponibles et adaptées est donc réalisé. Parmi les logiciels payants, les logiciels ENVI et eCognition sont retenus pour leur puissance et leurs performances en mode objet. Parmi les solutions gratuites, les logiciels Monteverdi, SPRING et l'Orfeo Toolbox sont retenus.
Logiciel Avantages Inconvénients
ENVI Software Exelis
- Complet
- Interopérabilité avec ArcGIS - Automatisation avec IDL - Gestion des images lourdes
- Coût d'acquisition (plusieurs milliers d'euros)
eCognition Trimble
- Puissance de ses fonctions orientées « objet »
- Complet
- Gestion des images lourdes
- Coût d'acquisition (plusieurs milliers d'euros)
Monteverdi Initié par le CNES
- Libre - Accessible
- Fonctions limitées
- Gestion des images lourdes Orfeo Toolbox
Initié par le CNES
- Libre - Complet
- Possibilités d'automatisation
- Peu accessible (interface en ligne de commande)
SPRING
Institut de recherche spatiale du Brésil
- Gratuit - Gestion des images lourdes
Compte tenu de la part modérée qu'occupe le traitement d'image dans les activités du domaine expérimental et des laboratoires partenaires, ainsi que des tarifs élevés des logiciels de télédétection, le choix se porte rapidement sur la gratuité. Dans ce contexte, l’écosystème Orfeo est rapidement privilégié. Au cours de ce stage, l'Orfeo Toolbox est utilisée en version 3.16 et Monteverdi en version 1.14.
L'Orfeo Toolbox (OTB) tient son nom du programme dont il est issu : le programme d’accompagnement méthodologique ORFEO, initié dans le cadre du déploiement des systèmes satellitaires Pléiade et Cosmo-Skymed. Développée par le Centre National des Études Spatiales (CNES), l’Orfeo Toolbox est constituée d’un ensemble d’outils algorithmiques adaptés à la télédétection et visant à capitaliser les connaissances méthodologiques en matière d’analyse d’image à très haute résolution spatiale (THRS). Elle est distribuée sous la forme d’une librairie open-source qui propose de nombreuses fonctions. Parmi elles : l’accès aux images, le filtrage, l’extraction d’informations, la segmentation, la classification, la détection de changements. Le développement de cette librairie s’accompagne, depuis 2009, de celui d’une interface graphique utilisant ses fonctionnalités : Monteverdi. Cette application, à fonctionnement modulaire, permet d’effectuer des manipulations et des traitements simples.
Dans le cadre du stage, étant donné le caractère peu intuitif de l'utilisation de ces logiciels, un mode opératoire des différents traitements employés est fourni en complément. Ce travail permet une transmission de compétences dans la perspective d'un développement de la filière imagerie au sein du domaine et des laboratoires partenaires. Le plan du mode opératoire (50 pages) est
disponible en annexe du présent rapport.
6. APPROCHE PIXEL ET APPROCHE OBJET EN TÉLÉDÉTECTION
La problématique du comptage en traitement d'image est relativement récente. Elle est apparue en même temps que les résolutions des satellites se sont affinées jusqu'à atteindre l'ordre du mètre (Pléiade, Quickbird) et relève de l'approche objet. En télédétection, avant le lancement des satellites VHR5, les traitements d'image relevaient principalement de l'approche pixel. Selon la
radiométrie d'un pixel et de celles des pixels voisins, telle classe lui était assignée. Les images satellites VHR ont vu naître un nouveau paradigme de traitement d'image : l'approche objet, notamment au travers de la GEOBIA (GEO-Object Based Image Analysis). Bien qu'elle s'appuie sur des algorithmes et des méthodes utilisés depuis des décennies, l'approche objet est un concept apparu au début des années 2000 dans les sciences de l'information géographique (Blaschke, Lang, et Hay, 2008).
Selon le wiki GEOBIA6 (Calgary University), il s'agit d'une sous-discipline des SIG destinée
à produire des objets géographiques à partir de données images VHR. En pratique, on ne travaille plus sur des pixels mais sur des régions de pixels. Ces régions de pixels sont ensuite caractérisées (forme, taille, radiométrie, texture, temporalité) avant d'être classifiées en fonction de leurs attributs.
Ces méthodes récentes sont inégalement implantées dans les logiciels de télédétection. Intégrées au logiciel eCognition, qui en fait sa spécialité, et au logiciel ENVI (module d'extraction d'objet), elles le sont moins au sein d'autres solutions payantes comme ERDAS (uniquement sous la forme d'une extension payante développée par une société tierce) ou IDRISI. C'est encore plus vrai pour les solutions gratuites.
L'Orfeo Toolbox présente plusieurs niveaux d'utilisations : l'utilisation d'applications pré-développées (un peu moins d'une centaine) en ligne de commande ou dans des interfaces basiques, ou le développement d'applications personnalisées (en langage C++) qui peuvent faire appel à toutes les fonctions de la librairie OTB. Bien qu'elles soient en cours de développement, les applications dédiées à l'approche objet ne sont pas encore disponibles. Pour travailler en approche objet avec l'Orfeo Toolbox, il faut coder sa propre application. Or, mes faibles compétences en programmation ne me permettent pas de mettre en œuvre ces solutions.
D'autres pistes sont citées mais doivent être abandonnées par la suite. L'extension Feature Analyst pour ArcGIS, éditée par la société Overwatch qui n'a pas donné suite à mes sollicitations, ainsi que le logiciel Saga Gis, en raison de la faiblesse de sa documentation et d'un manque de temps.
Cependant, les méthodes de l'approche objet aident à conceptualiser un modèle de traitement dont l'objectif est de compter les tournesols.
5 Very High Resolution : résolution atteignant le mètre (Quickbird, Pléiade) 6 http://wiki.ucalgary.ca/page/GEOBIA
A partir de l'ortho-mosaïque de la parcelle, on applique des premiers traitements dont l'objectif est de préparer le raster à une classification (filtrage, amélioration du contraste, découpage de la zone non-étudiée). Ce raster amélioré est ensuite classifié grâce à une classification orientée pixel (par exemple par la méthode Support Vector Machine) ou binarisée par des opérations mathématiques manuelles. En sortie, on obtient un raster labellisé, c'est-à-dire avec des pixels correspondant aux tournesols de valeur 1, et des pixels correspondant au sol de valeur 0. L'étape suivante est la vectorisation. Elle doit comprendre un nettoyage du raster par opérations morphologiques (suppression des bruits notamment). Une fois le fichier de formes vectorielles obtenu, les données peuvent être intégrées à un logiciel SIG et les entités peuvent être comptées automatiquement.
Ce modèle constitue la première piste théorique de travail. Toute la difficulté réside dans les méthodes de classification et de vectorisation.
7. LES OBSTACLES À LA CLASSIFICATION
L'observation de l'ortho-mosaïque fait apparaître une série d'irrégularités qui laisse présager des difficultés lors de l’exécution des algorithmes de classification. Elles relèvent principalement de variations importantes dans l'illumination des images, ainsi que dans la présence d'artefacts produits par l'ortho-mosaïquage.
Les images ci-dessus montrent une différence d'illumination selon la région de l'image. Les deux captures sont issues de la même ortho-mosaïque sous Monteverdi. Il est cependant important de noter que ce dernier applique, par défaut, un contraste correspondant à la suppression des valeurs
Illustration 18: Un premier modèle de traitements pour le comptage d'entités
extrêmes de l'histogramme des valeurs à une intensité de 2 %. Selon qu'ils soient situés dans la première ou dans la deuxième région, les tournesols possèdent une signature spectrale différente.
Les variations sont encore plus importantes pour le sol, comme l'illustrent ces images :
Produits des irrégularités de l'imagerie drone, ces variation sont parfois brutales. Comme sur Illustration 21: Signature spectrale des tournesols en fonction de
leur localisation en zone sombre (en vert) ou en zone illuminée (en rouge)
Illustration 22: Type 1 Illustration 23: Type 2 Illustration 24: Type 3