Discrete Controller Synthesis for Infinite State Systems with ReaX
Texte intégral
Figure


Documents relatifs
Motivated by recent work of Au, C´ ebron, Dahlqvist, Gabriel, and Male, we study regularity properties of the distribution of a sum of two selfad- joint random variables in a
Ainsi qu’il a ´et´e rappel´e en introduction, les ´etoiles `a neutrons sont des astres tr`es relativistes, presque autant que les trous noirs, leur param`etre de relativit´e
is a curve germ then it is in fact bilipschitz equivalent to the metric cone over its link with respect to the inner metric, while the data of its Lipschitz outer geometry is
Patients #18, 20 and 23 had negative FDG- PET examinations at baseline (cf. text for further discussion); b Semiquantitative grading of intensity of 18-F-Fluorodeoxyglu- cose
For the present test assessment, we used different groups of animals or sera to evaluate the operating characteristics: Experimentally infected calves served to comparatively
The purpose of this study was to assess the motor output capabilities of SMA, relative to M1, in terms of the sign (excitatory or inhibitory), latency and strength of
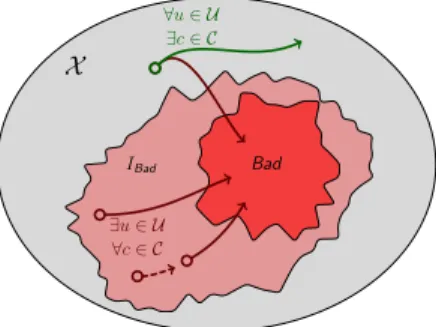
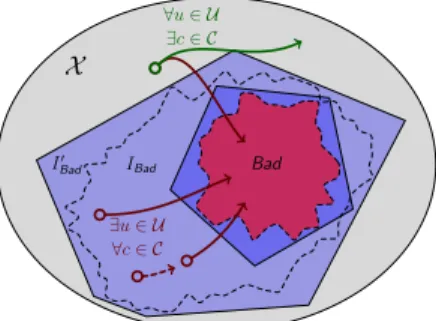
Our aim is to modify the initial system so that the controlled system could not enter the states of E(v). However, it is not possible to perform this transformation on the
Physical intuition tells us that a quantum system with an infinite dimen- sional Hilbert space can be approximated in a finite dimensional one if the amount of energy transferred
