The role of planarity in connectivity problems parameterized by treewidth
Texte intégral
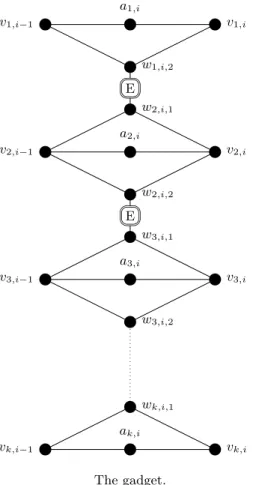
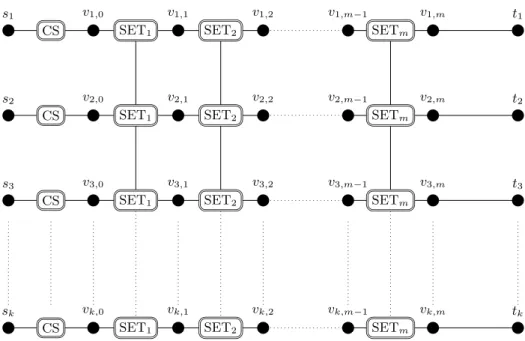
Figure
Documents relatifs
For every p-pass Shellsort algorithm and every increment sequence, every subset of n!/2 n input permutations of n keys contains an input permutation that uses ⍀ ( pn 1⫹(1⫺⑀)/p
Their linearity properties were recently studied by Drakakis, Requena, and McGuire, who conjectured that the absolute values of the Fourier coefficients of an Exponential Welch
All sets of r distinct nodes host the same amount of exclusive data, independently of the choice of the r nodes. The fault tolerance mechanism can accommodate r −1 simultaneous
Ilias, Immersions minimales, premiere valeur propre du Lapla- cien et volume conforme, Mathematische Annalen, 275(1986), 257-267; Une ine- galit´e du type ”Reilly” pour
In this paper, we give a sharp lower bound for the first (nonzero) Neumann eigenvalue of Finsler-Laplacian in Finsler manifolds in terms of diameter, dimension, weighted
The existence of a positive lower bound of the compressi- bility is proved in the case of general quantum lattice systems at high temperature.. The compressibility
Its main result is an asymptotically deterministic lower bound for the PE of the sum of a low compressibility approximation to the Stokes operator and a small scaled random
This result by Reilly is a generalization, to Riemannian mani- folds of class (R, 0) (R > 0), of the well known theorem by Lichnerowicz [18 ] and Obata [21], which says that
