République Algérienne Démocratique et Populaire
Ministère de l’Enseignement Supérieur et de la Recherche Scientifique Université des Sciences et de la Technologie d’Oran « Mohamed Boudiaf »
Faculté de Génie Electrique Département d’Electrotechnique
MEMOIRE PRESENTE POUR L’OBTENTION DU DIPLOME DE MAGISTER
SPECIALITE : ELECTROTECHNIQUE
OPTION : CONDITIONNEMENT DES RESEAUX ELECTRIQUES
Présentée par : Mme Amina MERHOUM
INGENIEUR EN ELECTROTECHNIQUE
Intitulé du mémoire:
SOUTENUE LE : 12 /03/2013, devant le jury composé de Messieurs :
Mr BOUTHIBA Tahar PROFESSEUR, USTO-MB Président
Mr ALLALI Ahmed MCA, USTO-MB Examinateur
Mr BENDJEBBAR Mokhtar MCA, USTO-MB Examinateur
Mr BOUZEBOUDJA Hamid MCA, USTO-MB Rapporteur
Optimisation Des Techniques
De MLI Pour Les Equipements
FACTS A Base D’onduleur
a
Remerciements :
Je remercie ‘‘ALLAH’’ tout puissant de m’avoir
donné la volonté et le courage de mener à bien ce travail.
Que Toutes les formes de Prière et de Salat soient
adressées à notre Ame et Conscience Sidna Mohammed,
notre lumière dans cette vie.
Je tiens à remercier mon encadreur, Mr Bouzeboudja
et Mr Tahri pour leurs critiques qui m’ont beaucoup aidé
apprécier ce travail et mieux éclairé mes perspectives.
Je suis reconnaissante à eux tout particulièrement pour la
confiance qu’ils m’ont témoignée.
Nos plus sincères remerciements vont également à Mr
BOUTHIBA, qui m’a fait l’honneur de présider le jury.
J’adresse aussi mes remerciements à Mr BENDJEBBAR
et Mr ALLALI, pour l’intérêt qu’ils portent à ma thèse
et pour avoir accepté de la jugée et d’en être
examinateurs.
Et enfin à tous nos collègues de la promotion
2009/2010 et à tous ceux qui ont contribué, de près ou de
loin, à la réalisation de cette thèse.
e modeste travail est dédié :
A ma chère mère que j’adule énormément et qui me
souhaite plein de courage et beaucoup de succès.
A ma chère grande mère que je souhaite une longue
vie pleine de santé
A mon cher papa
A mon cher mari qui m’a permis d’être là où je
suis aujourd’hui grâce à ses motivations et son
soutien, sans lui je n’aurais certainement pas arrivé à ce
résultat.
A mes beaux-parents que j’aime énormément.
A mes filles Douaa, Nour,
A mes frères Mohamed et Yacine
A mes beaux-frères Mohamed et Kheireddine
Ames adorables belles sœurs Mami, Fatma, Houaria,
Nabila, Rabia et leurs enfants et A toute ma famille.
c
Table des matières
Introduction générale ...02
Chapitre I : Généralité sur les onduleurs en MLI I.1. Introduction...05
I.2. Famille de convertisseurs statiques...06
I.3. Généralité sur les onduleurs MLI...06
I.4. Principe de fonctionnement de l’onduleur...08
I.5. Onduleur monophasé...09
I.5.1. Montage en demi-pont …...09
I.5.2. Montage en pont...10
I.6.onduleur triphasé en pont...10
I.6.1.Principe de fonctionnement (une phase)...10
I.7. Classification des onduleurs...11
I.8. Modélisation de l’onduleur triphasé...11
I.9. Paramètres de performance de l’onduleur...13
I.10. Origine des harmoniques...14
I.10.1. Déformation d’un signal sinusoïdal….……….…..14
I.10.2. Mode de représentation : le spectre en fréquence...15
I.10.3. L’harmonique mesuré en pratique...15
I.11. Conclusion………...……….….15
Chapitre II : Différents types de commande de MLI II.1. introduction...17
II.2.MLI simple...17
II.3. MLI multiple...18
II.4.MLI sinusoïdale...19
II.5. MLI sinusoïdale modifiée...22
II.6. Commande par déplacement de phase...23
II.7.Contrôle de tension d'un onduleur triphasé...24
II.8. Conclusion...25
Chapitre III : Technique d e mod u lation avan cée III.1. Introduction...27
III.2.Modulation trapézoïdale...27
III.3.Modulation en escalier...28
III.4.Modulation par échelle...29
III.5. Modulation delta...29
III.6.Modulation par injection d'harmoniques...30
III.7.Modulation pré calculée...32
III.7.1. MLI monophasée...32
III.7.1.1.Décomposition en série de Fourier d’un signal MLI………...32
III.7.1.2. La MLI programmée unipolaire ……….……34
III.7.2. MLI triphasé ...34
Chapitre IV : Les Méthodes d’optimisation
IV.1– Place de l’optimisation dans la démarche de conception en électrotechnique ...36
IV.1.1. Introduction ...36
IV.1.2. Méthodologie de conception ...36
IV.1.3. Formalisme mathématique...38
IV.I.3.1. Optimisation continue sans contraintes ... .39
IV.I.3.2. Optimisation continue avec contraintes...39
IV.I.3.3. Optimisation à objectifs multiples...40
IV.1.4.Traitements des contraintes ...40
IV.1.4.1. Méthodes des pénalités ...40
IV.1.4.2. Lagrangien ...43
IV.2 – Méthodes d’optimisation...44
IV.2. 1. Introduction ... 44
IV.2.2. Caractéristiques...44
IV.2.2.1. Sensibilité et robustesse d’une méthode d’optimisation...44
IV.2.2.2. Opérateurs de recherches fondamentaux ...45
IV.2.2.3. Mode de recherche de l’optimum...45
IV.2.3. Classification des méthodes d’optimisation ...45
IV.2.3.1. Méthodes déterministes ...46
IV.2.3.2. Méthodes stochastiques ...48
IV.2.4. Algorithmes Génétiques...49
IV.2.4.1. Introduction ... 49
IV.2.4.2. Principe... 49
IV.2.4.3. Codage ...50
IV.2.4.4. Population initiale...53
IV.2.4.5. Fonction d’adaptation ...53
IV.2.4.6. Méthodes de sélection ...54
IV.2.4.7. Modèles de reproduction ...56
IV.2.4.8. Traitement des contraintes...60
IV.2.5. Sélection des individus ...61
IV.2.6. Recuit simulé...62
IV.2.6.1. Introduction ...62
IV.2.6.2. Notions...63
IV.2.6.3. Algorithme...64
IV.2.6.4. Paramètres ...64
IV.2.7. Recherche taboue...66
IV.2.7.1. Introduction ...66
IV.2.7.2. Recherche taboue à variables continues ...66
IV.2.7.3. La recherche taboue de Hu ...67
IV.2.8. Conclusion ...68
Chapitre V : Application des AG à la minimisation de la fonction MLI bipolaire et unipolaire V.1.Introduction ...70 V.2. Optimisation de la technique MLI pré calculée bipolaire de l’onduleur monophasé par la
V.2.1.e. Résultats d’élimination de la onzième harmonique par l’AG ...80
V.2.2. Interprétation des résultats ……….82
V.3. Optimisation de la technique MLI pré calculée unipolaire de l’onduleur monophasé par la méthode des AG...82
V.3.1.a. Résultats d’élimination de la troisième harmonique par l’AG...84
V.3.1.b. Résultats d’élimination de la cinquième harmonique par l’AG...…..…………..86
V.3.1.c. Résultats d’élimination de la septième harmonique par l’AG... ...88
V.3.1.d. Résultats d’élimination de la neuvième harmonique par l’AG...90
V.3.1.e. Résultats d’élimination de la onzième harmonique par l’AG ...92
V.3.2. Interprétation des résultats ……….94
V.4. Optimisation de la technique MLI pré calculée bipolaire de l’onduleur triphasé par la méthode des AG...94
V.4.1.a. Minimisation de la cinquième harmonique de la MLI bipolaire de l’onduleur triphasé ………...94
V.4.1.b. Interprétation des résultats………...96
V.4.1.c. Minimisation de la septième harmonique de la MLI bipolaire de l’onduleur triphasé ………...97
V.4.1.d. Interprétation des résultats………...99
V.4.1.e. Minimisation de la onzième harmonique de la MLI bipolaire de l’onduleur triphasé ………...99
V.4.1.f. Interprétation des résultats………...101
V.5. Optimisation de la technique MLI pré calculée unipolaire de l’onduleur triphasé par la méthode des AG...101
V.5.1.a. Minimisation de la cinquième harmonique de la MLI unipolaire de l’onduleur triphasé ………...101
V.5.1. b. Minimisation de la septième harmonique de la MLI unipolaire de l’onduleur triphasé ………...104
V.5.1.c. Minimisation de la onzième harmonique de la MLI unipolaire de l’onduleur triphasé ………...106
V.5.2. Interprétation des résultats………..………..108
V.6.Conclusion………...……….108
Conclusion générale ...110
Introduction générale :
Introduction générale :
Depuis de nombreuses années, le fournisseur d'énergie électrique s'efforce de garantir la qualité de l'énergie électrique, les premiers efforts se sont portés sur la continuité de service afin de rendre toujours disponible l'accès à l'énergie chez l'utilisateur. Aujourd'hui, les critères de qualité ont évolué avec le développement des équipements où l'électronique prend une place prépondérante dans les systèmes de commande et de contrôle et qui entraîne de plus en plus de problèmes de perturbations au niveau des réseaux électriques. Ces dispositifs sensibles, mais qui dégradent également la qualité de la tension, existent dans toutes les catégories d'utilisateurs tels que le domaine industriel par l'emploi de convertisseurs de l'électronique de puissance, le domaine tertiaire avec le développement de l'informatique et le domaine domestique par l'utilisation en grand nombre des téléviseurs, magnétoscopes, lampes à économie d'énergie, ...
Ainsi, on assiste à une augmentation régulière, de la part des utilisateurs, des taux de déséquilibre des courants et d'harmonique, ainsi qu'à une importante consommation de la puissance réactive. La circulation de ces mêmes courants perturbés va également provoquer des déséquilibres (non symétrie) de tension et des harmoniques, lesquels vont se superposer à la tension nominale du réseau électrique. De plus, des incidents du type coups de foudre, court- circuit ou un brusque démarrage d'une machine tournante à forte puissance peuvent causer une chute soudaine et importante de tension. On nommera ce type d'incident: creux de tension. Ces perturbations ont bien entendu des conséquences néfastes sur les équipements électriques, lesquelles peuvent aller d'un fort échauffement ou d'un arrêt soudain des machines tournantes jusqu'à la destruction totale de ces équipements. Plusieurs solutions de dépollution des réseaux électriques ont été déjà proposées pour améliorer la qualité de la puissance écoulée dans le réseau en d'autres mots améliorer le transit de puissance. Celles qui répondent le mieux aux contraintes industrielles en matière de l'amélioration du transit de puissance et qui sont les
FACTS (Flexible Alternative Current Transmission Systems). La technologie de la
compensation par des FACTS s'est avéré une solution fiable et rentable aux problèmes de qualité de l'onde reliés à la puissance réactive et active. Le compensateur statique de puissance réactive, de même que la compensation série variable, font partie d'une première génération de dispositifs FACTS, recourant à des thyristors « conventionnels » pouvant être commandés à l'allumage mais pas à l'extinction. La seconde génération utilise des thyristors GTO ou IGBT pouvant être commandés à l'allumage et à l'extinction. Les onduleurs sont des convertisseurs statiques qui peuvent utiliser ces dispositifs de commande. Généralement, les onduleurs utilisent la commande MLI (Modulation en Largeur d’Impulsions) pour produire une tension de sortie alternative.
La Modulation en Largeur d’Impulsions (MLI) est une technique de pilotage pour les convertisseurs statiques servant d'interface entre une charge (machine électrique, …) et son dispositif d'alimentation (onduleur triphasé, …). Elle est donc une technique utilisée pour la conversion de l’énergie, ayant ses bases dans le domaine des télécommunications (traitement du
Introduction générale :
aux surtensions qui apparaissent lors de l’utilisation des longs câbles. En ce qui concerne l’étude elle-même de la fonction MLI, elle se situe pratiquement entre les deux domaines principaux du métier : l’entraînement (algorithmes de commande) et l’électronique, Il existe plusieurs types de modulateurs utilisables pour réaliser la fonction MLI. Il se différentie bien de l'aspect génération de la modulante qui ne tient pas directement de la façon d'obtenir les impulsions de commande. Il faut aussi faire la différence entre la MLI et les boucles de contrôle par Hystérésis qui, de même que le DTC, ne peuvent être classifiées comme méthodes MLI, ceci parce que ce sont des méthodes qui fonctionnent d'une part en boucle fermée et d'une autre part ce n'est pas la durée de l'impulsion qui est directement contrôlée. Cette discussion sera élargie lors de la classification des techniques MLI dans le Chapitre II.
L’objectif de ce travail est d’utiliser un algorithme génétique sous contraintes pour optimiser les harmoniques de tension, cet algorithme génétique qui est une méthode d’optimisation stochastique basée sur des techniques dérivées de la génétique et des mécanismes de sélection naturelle va être appliqué à la minimisation de la fonction MLI programmée unipolaire et bipolaire. En fait, les méthodes stochastiques permettent de localiser l’optimum d’une fonction dans l’espace des paramètres sans avoir recours aux dérivées de la fonction par rapport à ces paramètres. De plus, elles ne se laissent pas piéger par un optimum local et réussissent le plus souvent à déterminer l’optimum global de la fonction considérée. Leur principe consiste à travailler avec un ensemble de solutions, puis à les faire évoluer au moyen des règles heuristiques et probabilistes. Contrairement à la plupart des méthodes stochastiques les méthodes déterministes telles que : la méthode de Newton Raphson nécessite un bon choix des conditions initiales pour converger, et la connaissance du gradient de la fonction objective pour atteindre la solution optimale.
Pour atteindre ces objectifs de recherche, cette thèse sera organisée en cinq chapitres avec une introduction générale et une conclusion générale présentant des suggestions :
Le premier chapitre : est consacré à des généralités sur les onduleurs en MLI monophasés et triphasés en pont complet et en demi-pont et à la classification des onduleurs.
Le deuxième chapitre : expose une étude des différents types d e commande de MLI. Le troisième chapitre : expose des techniques de modulation avancée MLI.
Le quatrième chapitre : sera divisé en deux parties.
La partie I est consacrée à l’exposé d’une méthodologie de conception applicable au domaine de l’électrotechnique. Elle s’appuie sur la résolution de problèmes d’optimisation sous contraintes. Notamment, la formulation d’un problème de conception en un problème d’optimisation est présentée.
La partie II brosse un état de l’art des techniques d’optimisation capables de résoudre les problèmes de conception en électrotechnique. Deux grandes classes de méthodes sont présentées : les méthodes déterministes et les méthodes stochastiques.
Les caractéristiques principales de chaque classe, leurs points forts et leurs points faibles sont montrés.
Et enfin Le cinquième chapitre sera consacré à l’application de l’algorithme génétique à la minimisation de la fonction MLI programmée unipolaire et bipolaire de l’onduleur monophasé et triphasé. Les résultats des exécutions des programmes seront présentés avec des commentaires.
Chapitre I : Généralités sur les onduleurs en « MLI »
I.1. Introduction :
Une des branches de l’électronique en pleine expansion est l’électronique de puissance qui traite et contrôle l’énergie électrique ainsi que sa conversion en d’autres formes d’énergie afin de fournir des tensions et des courants aux différents types de charges selon les applications. On distingue fondamentalement les conversions suivantes: alternatif/ continu, continu/alternatif, alternatif/alternatif, continu/continu et la conversion alternatif/continu/alternatif ; c’est le cas particulier des applications pour des alimentations ininterrompues (UPS). L’électronique de puissance a pour avantages : une utilisation plus souple et plus adaptée de l’énergie électrique une amélioration de la gestion, du transport et de la distribution de l’énergie électrique. Une discrétion par une réduction des masses et des volumes ainsi que par un fonctionnement ultrasonore des dispositifs. Les premiers convertisseurs de puissance électrique ont été réalisés avec des machines électriques couplées mécaniquement. Une machine a courant alternatif d’une part (de type synchrone ou asynchrone) couplée au réseau permettait de convertir l'énergie électrique en énergie mécanique à vitesse fixe. Une machine à courant continu d'autre part dont l'excitation commandée permettait de disposer d'une tension continue variable en sortie. Le développement des composants de puissance au milieu du 20° siècle (électronique de puissance) a permis de développer des convertisseurs de puissance électrique sans machines tournantes. La technologie des composants utilisés (semi-conducteurs) ne cesse d'évoluer : faible coût ; puissances commutées élevées ; facilité de contrôle. La source d'entrée du convertisseur statique peut être du type source de courant ou du type source de tension. En sortie du convertisseur, on contrôle l'amplitude des tensions ou des courants ainsi que leur fréquence.
Dans ce travail, on s’intéresse à la conversion continu/alternatif, cependant, nous utiliserons une des commandes que nous avons implantées pour s’assurer de sa fonctionnalité. Le but de cette partie serait de faire une synthèse de la technique utilisée pour l a commande des convertisseurs monophasé et triphasé, la commande de largeur d’impulsion pour les raisons suivantes ; elle permet à l’onduleur de :
Générer une onde de sortie très proche de la forme idéale.
D’obtenir le contrôle linéaire de l’amplitude de la tension et du courant de sortie avec la commande des interrupteurs.
Chapitre I : Généralités sur les onduleurs en « MLI »
I.2. Familles de convertisseurs statiques :
Suivant le type de machine à commander et suivant la nature de la source d e puissance, on distingue plusieurs familles de convertisseurs statiques schéma ci-dessous (Figure I.1) :
Figure I.1 : Familles des convertisseurs statiques.
Une notion importante en électronique de puissance comme en électrotechnique est la notion de réversibilité. Un convertisseur statique d'énergie est dit réversible lorsque l'énergie peut transiter dans les deux sens (source → récepteur ou récepteur → source) de manière naturelle ou commandée.
I.3. Généralités sur les onduleurs en MLI :
Les convertisseurs de courant continu en courant alternatif sont appelés des onduleurs. La fonction d’un onduleur est de convertir une tension continue d’entrée en une tension de sortie alternative symétrique d’amplitude et de fréquence désirée. La tension de sortie variable peut être obtenue en variant la tension continue d’entrée et en maintenant le gain de l’onduleur constant. D’autre part, si la tension d’entrée est fix e et qu’elle soit non contrôlable, une tension de sortie variable peut être obtenue en variant le gain de l’onduleur.
Il y a plusieurs techniques pour obtenir cette variation, la technique de modulation des largeurs d’impulsion MLI est la plus répandue. Elle consiste à changer la largeur des impulsions de la tension de sortie avec des commandes appropriées des interrupteurs à semi-conducteurs de l’onduleur.
Le gain de l’onduleur peut être défini comme le rapport entre la tension alternative de sortie et la tension continue d’entrée.
La forme d’onde de la tension de sortie d’un onduleur idéal doit être sinusoïdale. Cependant, cette forme d’onde n’est pas sinusoïdale en pratique et contient quelques harmoniques. Ce qui veut dire qu’il existe des harmoniques de tension. Le but serait donc d’obtenir à la sortie un signal avec un taux de distorsion harmonique le plus faible possible.
Chapitre I : Généralités sur les onduleurs en « MLI »
Pour des applications de faibles et moyennes puissances, les tensions de forme d’onde carrée ou quasi-carrée pourront être acceptables ; alors que pour les applications de fortes puissance une forme d’onde sinusoïdale avec un faible taux de distorsion des harmoniques est exigé. Avec la disponibilité des dispositifs semi-conducteurs de puissance à haute vitesse, l’harmonique contenue dans la tension de sortie peut être minimisée ou réduite significativement par des techniques de commande.
Les onduleurs sont largement utilisés dans les applications industrielles par exemple : variateur de vitesse des moteurs à courant alternatif, chauffage par induction, les alimentations de secours, les alimentations non interrompues (UPS). L’entrée d’un onduleur peut être une batterie, une tension continue issue des panneaux solaire, ou d’autre source de courant continu obtenus à partir d’un redressement monophasé ou triphasé comme le montre la figure (I.2) ci- dessous.
Figure I.2 : Principe de fonctionnement de l’onduleur.
De façon générale, les onduleurs peuvent être classifiés en deux types : les onduleurs monophasés et les onduleurs triphasés. Chaque groupe peut utiliser les dispositifs de commande comme : BJT, MOSFET, MCT, SIT, GTO ou commande forcée des thyristors en fonction des applications. Généralement, ces onduleurs utilisent la commande MLI pour produire une tension
Chapitre I : Généralités sur les onduleurs en « MLI »
I.4. Principe de fonctionnement de l’onduleur :
Le principe de fonctionnement d’un onduleur est basé sur l’électronique de commutation, on génère une onde de tension alternative a partir d’une tension continu comme le montre la figure (I.3), on peut dire qu’il existe deux moyens pour réaliser cette conversion.
Figu re I.3 : S ymb ole et sign al d ’u n ond uleu r
1-L’utilisation directe d’une paire d’interrupteurs de base qui consiste à régler la fréquence et la durée des interconnexions de la source avec la sortie. Il est donc plutôt temporel et débouche sur les techniques de modulation de largeur d’impulsion. 2- Contrôler l’amplitude soit de façon continue en créant une source réglable (ce qui suppose l’existence d’un autre étage de conversion), soit de façon discrète en disposant d’un nombre suffisant de sources.
Quand S1 – S2 sont Fermé (On) et S3 – S4 sont Ouvert (Off) pour t1 < t < t2 on obtient une alternance positive U(t) = Vdc comme la montre la figure (I.4) ci-dessous :
Figure I.4 : Fonctionnement et signal de l’onduleur dans le 1er demi cycle.
Quand S1 – S2 sont Ouvert (Off) et S3 – S4 sont Fermé (On) pour t2 < t < t3 on obtient une alternance négative U(t) = -Vdc comme la montre la figure (I.5)
Chapitre I : Généralités sur les onduleurs en « MLI »
Pour obtenir le signal résultant sur la période complète qui est présenté sur la figure (I.6)
Figure I.6 : Signal complet de l’onduleur. I.5 Onduleur monophasé :
Pour réaliser un onduleur monophasé il suffit de disposer d’un interrupteur inverseur K Et d’une source de tension continue E comme le montre la figure (I.7).
Figure I.7 : Montage d’un onduleur monophasé.
Montages pratiques : Deux types de montages sont utilisés :
I.5.1 Montage en demi-pont :
Dans ce type de montage (figure I.8), on fait l’hypothèse que la capacité «C »Des deux condensateurs est suffisamment grande pour que l’on puisse considérer qu’en régime permanent la tension à leur borne reste toujours égale à E/2.
Chapitre I : Généralités sur les onduleurs en « MLI »
I.5.2Montage en pont :
Il est constitué de deux cellules de commutation et la charge est connectée entre les sorties S1 et S2 de chacune des deux cellules (figure I.9). La tension de sortie est donc la différence entre les tensions élémentaires vs1et v s 2 de chaque cellule.
Figure I.9 : Montage d’un onduleur en pont complet.
L’intérêt des montages en pont ou en demi -pont réside dans l’utilisation d’une seule source de tension E.
La diode parallèle est utilisée quand le courant dans le commutateur est négatif La diode inverse est décentrée quand le courant est positif dans le commutateur.
I.6 On du leu r triph asé en p on t :
L’onduleur triphasé en pont est constitué de trois cellules de commutation (figure I.10). On retrouve évidemment une structure différentielle dans laquelle les tensions triphasées sont obtenues de façon composée sur les trois bornes de sortie. L’onduleur triphasé doit évidemment, en régime normal, délivrer un système de tension dont les composantes fondamentales forment un système équilibré.
Figure I.10 : Montage d’un onduleur triphasé. I.6.1. Prin cip e d e f onction n emen t (u n e p hase):
Dans la configuration différentielle de l’onduleur triphasé, la cellule de commutation peut donc être considérée comme une phase de l’onduleur, la composante alternative de sa tension de sortie constituant une tension simple comme le montre la figure (I.11) ci-dessous pour chaque tension.
Chapitre I : Généralités sur les onduleurs en « MLI »
Figure I.11 : Allure des tensions simples de l’onduleur triphasé. I.7. Classification des onduleurs :
Il existe plusieurs centaines de schémas d`onduleurs, chacun correspondant à un type d`application déterminé ou permettant des performances recherchées. Les onduleurs sont en général classés selon les modes de commutation de leurs interrupteurs.
a. Onduleur autonome : C’est un système qui nécessite des composants commandés à la fois à la fermeture et à l'ouverture, de fréquence variable, dont les instants de commutations sont imposés par des circuits externes. La Charge est quelconque. Cet onduleur n'est pas réversible.
b. Onduleur non autonome : Dans ce cas, les composants utilisés peuvent être de simples thyristors commandés uniquement à la fermeture et la commutation est "naturelle" contrairement à l'onduleur autonome.
L'application principale de ce type d'onduleur se trouve dans les variateurs pour moteurs synchrones de très forte puissance où les thyristors sont souvent les seuls composants utilisables.
I.8. Modélisation de l’onduleur triphasé :
L’onduleur triphasé dit deux niveaux est illustré par son circuit de puissance de la figure (I.12). On doit distinguer d’une part les tensions de branche VAN, VBN, VCN mesurées par rapport à la borne négative de la tension continue Vpv, d’autre part, il y a les tension de phases VAn, VBn et VCn mesurées par rapport à un point neutre flottant n représentant une charge équilibrée montée en étoile. Des tensions simples on peut tirer facilement les tensions composées VAB, VBC et VCA.
Chapitre I : Généralités sur les onduleurs en « MLI »
Figure I.12 : Circuit de fonctionnement de l’onduleur triphasé.
Dans le circuit de puissance de l’onduleur triphasé de la figure (I.12), il est à noter que les états des interrupteurs d’un même bras sont complémentaires. En utilisant ces états des interrupteurs, nous pouvons obtenir les tensions de branche de sortie de l’onduleur mesurées par rapport à la borne négative de la tension du côté continu comme suit :
VAN= S1.Vpv
VBN= S2.Vpv (I.1)
VCN = S3.Vpv
Où S1, S2 et S3 désignent les états des interrupteurs des phases A, B et C respectivement.
-Les tensions composées sont :
VAB= VAN+VNB= VAN-VBN= (S1- S2) Vpv
VBC= VBN+VNC= VBN-VCN= (S2– S3) Vpv
(I.2)
VCA= VCN+VNA= VCN-VAN= (S3– S1) Vpv
On peut écrire l’équatio n (I.2) sous la forme matricielle.
( ) = ( ) × ( )
(I.3)
-Les tensions simples sont:
VAN = (2/3) V AN – (1/3) (V BN + VCN) VBN = (2/3) V BN – (1/3) (V AN + VCN) VCN = (2/3) V CN – (1/3) (V AN + VBN) On peut écrire l’équation sous la forme matricielle.
Chapitre I : Généralités sur les onduleurs en « MLI »
I.9. Paramètre de performance de l’onduleur :
Les sorties d’un onduleur (tension, courant) contiennent certaines harmoniques, et la qualité de l’énergie fournit par un onduleur est évaluée suivant les paramètres de performance suivant :
a . F a c t e u r d e l a nième harmonique HFn:
C ’est la mesure de la contribution individuelle des harmoniques définit comme suit:
Veffn: Valeur efficac e de la nième harmonique. Veff 1 : Valeur ef ficace de la fondamentale . b. Distorsion d’harmonique total THD et le facteur DF :
Le taux de distorsion, encore appelé distorsion harmonique totale est défini comme le
rapport de la valeur efficace globale des harmoniques (c'est-à-dire leur somme quadratique) à la valeur efficace de la composante fondamentale.
Il peut s’appliquer soit au courant ou à la tension √
THD =
(I.5)
On va couramment jusqu’au 40ème ou 50ème rang d’harmoniques. Cette grandeur permet d’évaluer à l’aide d’un nombre unique la perturbation d’un courant ou d’une tension en un point d’un réseau, voire de comparer deux réseaux sujets à des harmoniques de rangs différents.
Le THD représente sensiblement l’augmentation de l’effet Joule dans les lignes et les dispositifs.
Un appareil de mesure qui n’effectue pas une analyse spectrale ne mesure pas le THD mais une valeur approchée appelée le facteur de distorsion, ou DF.
Ce facteur, inférieur à 100 %, est défini par le rapport de la valeur efficace des harmoniques à la valeur efficace du signal total.
√
DF =
√
(I.6)
Lorsque la distorsion est faible, les deux valeurs THD et DF sont équivalentes. S i DF dépasse les 15%, il est possible de corriger la mesure pour obtenir le taux de
Chapitre I : Généralités sur les onduleurs en « MLI »
Un bon appareil d’analyse de réseaux donne la valeur efficace du signal puis le compare à celle du signal sans son fondamental. Mais certains appareils ne mesurent que la valeur moyenne des signaux redressés et non pas les valeurs efficaces. La mesure peut être alors inférieure à DF, et aucune correction ne permet de retrouver THD.
La distorsion de l’onde de tension est proportionnelle à l’impédance du réseau et à l’amplitude des courants harmoniques. La précision de son calcul n’est limitée que par l’incertitude de l’impédance du réseau.
Le taux de distorsion du réseau électrique est presque partout inférieur à 2% en HTB, 5% en HTA et 7% en BT. C’est la mesure de la similitude de la forme d’onde réelle avec sa composante fondamentale.
THD
=
[∑
]
(I.8)
Le THD en tension caractérise la déformation de l’onde de tension.
Une valeur de THDu inférieure à 5 % est considérée comme normale. Aucun disfonctionnement n’est à craindre.
Une valeur de THDu comprise entre 5 et 8 % révèle une pollution harmonique significative. Quelques disfonctionnements sont possibles.
Une valeur de THDu supérieure à 8 % révèle une pollution harmonique importante. Des disfonctionnements sont probables. Une analyse approfondie et la mise en place de dispositifs d’atténuation sont nécessaires.
Le THD en courant caractérise la déformation de l’onde de courant.
Une valeur de THDi inférieure à 10 % est considérée comme normale. Aucun disfonctionnement n’est à craindre.
Une valeur de THDi comprise entre 10 et 50 % révèle une pollution harmonique significative. Il y a risque d’échauffements, ce qui implique le surdimensionnement des câbles et des sources.
Une valeur de THDi supérieure à 50 % révèle une pollution harmonique importante. Des disfonctionnement sont probables. Une analyse approfondie et la mise en place de dispositifs d’atténuation sont nécessaires.
I.10. Origine des harmoniques :
I.10.1 Déformation d’un signal sinusoïdal :
y(t) =Y0 + ∑ √ ωt- φn)
Yo :Valeur de la composante continue généralement nulle et considérée comme telle par la suite, Yn : Valeur efficace de l’harmonique de rang n,
ω: Pulsation de la fréquence fondamentale,
φn: Déphasage de la composante harmonique à t = 0.
Chapitre I : Généralités sur les onduleurs en « MLI »
I.10.2 Mode de représentation : le spectre en fréquence :
Le spectre est un histogramme fournissant l’amplitude de chaque harmonique en fonction de son rang. L’examen du spectre permet d’apprécier à la fois quels sont les harmoniques en présence et leur importance respective comme le montre la figure (I.13).
La figure I.13 : Spectre d’un signal.
Spectre d’un signal de composante fondamentale 50Hz, et comportant des harmoniques de rangs 3(150Hz), 5(250Hz), 7(350Hz) et 9(450 Hz). Comme le montre la figure (I.13) ci-dessus.
I.10.3 L’harmonique mesuré en pratique :
Les harmoniques les plus fréquemment rencontrés dans le cas des réseaux triphasés, donc en pratique les plus gênants, sont les harmoniques de rangs impairs.
Au-delà du rang 50, les courants harmoniques sont négligeables et leur mesure n’est plus significative. Ainsi, une bonne précision de mesure est obtenue en considérant les harmoniques jusqu’au rang 30.
Les distributeurs d’énergie surveillent les harmoniques de rang 3, 5, 7, 9, 11 et13. Aussi, la compensation des harmoniques jusqu’au rang 13 est impérative, une bonne compensation prendra également en compte les harmoniques jusqu’au rang 25.
I.11.Conclusion :
Dans ce chapitre nous avons présenté des généralités sur les onduleurs en MLI, toutes les caractéristiques des onduleurs monophasés et triphasés en pont et en demi-pont sont présentées avec leurs Paramètre de performance.
C h a p i t r e I I : Différents type de commande « M L I »
II.1. Introduction :
Dans plusieurs applications industrielles, on est souvent préoccupé d'avoir une alimentation stable et réglable. Cette tension peut être obtenue au moyens des onduleurs qui éliminent les fluctuations de la tension continue d'entrée, en maintenant la relation tension / fréquence constante tout en réglant l'amplitude de la tension requise par la charge. Plusieurs méthodes sont utilisées pour obtenir cette tension et la MLI est l'une des plus efficaces. En plus de régler l'amplitude, cette méthode contrôle le contenu harmonique de la tension de sortie de l'onduleur en repoussant les harmoniques d'ordre inférieur vers les fréquences les plus élevées, ce qui rend le filtrage plus facile et moins coûteux, car la taille des composantes du filtre, est assez réduite. Cependant, on note que la technique de MLI a des limites par rapport à la fréquence d'opération des onduleurs. Plus cette fréquence est élevée, plus les pertes dues à la commutation des interrupteurs à semi-conducteurs sont élevées aussi. En plus, la fréquence d'opération des onduleurs MLI est également limitée par la vitesse de commutation propre des interrupteurs à semi-conducteurs.
Plusieurs techniques de contrôle à MLI ont été développées. Les plus utilisées sont les suivantes:
1 - Modulation MLI simple. 2 - Modulation MLI multiple. 3 - Modulation MLI sinusoïdale.
4 - Modulation MLI sinusoïdale modifiée. 5 - Commande par déplacement de phase.
Nous passons en revue l'ensemble des techniques dans le but de les introduire et bien situer les limitations de chacune d'elles.
II.2. MLI simple :
Cette technique de MLI utilise une seule impulsion par demi-cycle et la largeur de cette impulsion fait varier l'amplitude de la tension à la sortie de l'onduleur (aux bornes de la charge).
Les signaux de commande sont obtenus par comparaison d'un signal de référence d'amplitude Ar, avec un signal d'onde porteuse triangulaire d'amplitude Ac. La figure(II. 1)
montre la génération des signaux de commande et de sortie d'un onduleur monophasé à pont complet utilisant la modulation MLI simple. La fréquence du signal de référence est celle de la fondamentale de la tension de sortie. En variant Ar, de 0 à Ac, la largeur d'impulsion δ
p e u t v a r i e r d e 0 à 1 8 0 ' . Le rapport entre Ar, e t Ac est la variable de contrôle et est
appelée indice de modulation d'amplitude ou tout simplement indice de modulation.
(II.1)
La tension de sortie efficace peut être trouvée pa r :* ∫
+
√
(II.2)
C h a p i t r e I I : Différents type de commande « M L I »
C h a p i t r e I I : Différents type de commande « M L I »
Figure II.1: MLI d’une simple impulsion II.3.MLI multiple :
Lorsqu'on veut réduire le contenu harmonique, on utilise plusieurs impulsions dans chacune des alternances de la tension de sortie. Cette technique est connue sous le nom de MLI multiple. La génération des signaux de commande pour permettre la conduction et le blocage des transistors est montrée sur la figure (II.2) obtenue en comparant un signal de référence avec une porteuse triangulaire.
La fréquence du signal de référence règle la fréquence de sortie fo et la fréquence porteuse fc, du signal détermine le nombre d'impulsions durant la demi alternance, «p», l'indice de modulation contrôle l'amplitude de la tension de sortie. Ce type de modulation est également connu sous le nom de Modulation en Largeur d'Impulsions Uniforme (UMLI 'Vni form P ulse W idth Modulation '). Le nombre d'impulsions par demi-cycle est:
(II.4)
Ou est appelé taux de modulation de fréquence.La variation de l'indice de modulation M de 0 à 1 fait varier la largeur d'impulsion de 0 à π/ p et la tension de sortie de 0 à Vs.
La tension de sortie d'un onduleur en pont est donnée par la figure. II.2.b pour une MLI uniforme. Si δ est la largeur de chaque impulsion, la tension efficace de sortie peut être calculée d'après la formule :
* ∫
+
√
(
) (II.5)
C h a p i t r e I I : Différents type de commande « M L I »
C h a p i t r e I I : Différents type de commande « M L I »
Le coefficient Bn, peut être déterminé en considérant une paire d'impulsions telle que
l'impulsion positive de durée δ démarre à ωt =α et l'impulsion négative de même largeur démarre à ω = π +α comme l'indique la figure. II.2.b. Les effets de toutes les impulsions prises ensemble donnent la tension de sortie effective (théorème de superposition).
Si l'impulsion positive de la miéme paire démarre à ωt = αm, et s'arrête à ωt = αm, + π, le coefficient de la série de Fourier pour une paire d'impulsions est :
*∫ – ∫ +
* ( ) ( )+
(II.7)
Le coef ficient B n, peut être obtenu en additionnant des effets de toutes les impulsions;
∑ * ( ) ( )+
(II.8)
L'ordre des harmoniques est le même que pour le cas précédemment étudié; mais le facteur de distorsion est considérablement réduit. Cependant, à cause du nombre élevé de commutations (n fois), les pertes augmentent également de n fois. Pour un nombre élevé d'impulsions p, les amplitudes des harmoniques d'ordre inférieur sont réduites tandis que les mêmes amplitudes pour les harmoniques d'ordre élevé augmentent. Cependant, ces harmoniques produisent une faible distorsion qui peut être facilement filtrée à la sortie.
Figure. II.2 : MLI multiple. II.4. MLI sinusoïdale :
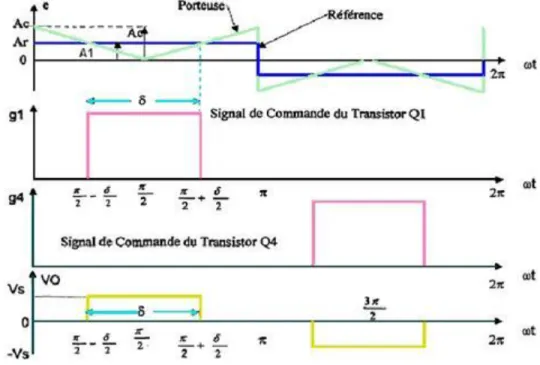
Au lieu de maintenir la largeur de toutes les impulsions constantes, comme dans le cas de la MLI uniforme, dans ce cas, la largeur de chaque impulsion varie en fonction de l'amplitude d'une onde sinusoïdale évaluée au centre de la même impulsion. Le facteur de distorsion et les harmoniques sont réduits significativement.
Les signaux de commande sont montrés sur la figure. II.3.a et sont générés en comparant un signal de référence sinusoïdale avec une onde porteuse triangulaire de fréquence fc.
C h a p i t r e I I : Différents type de commande « M L I »
Ce type de modulation est communément utilisé dans les applications industrielles. La fréquence du signal de référence f r, détermine la fréquence f 0d e l ’ o n d u l e u r ; a l o r s q u e l'amplitude maximale Ar, contrôle l'indice de modulation M qui à son tour détermine la tension efficace de sortie V0.
Le nombre d'impulsions par demi-cycle dépend de la fréquence de l'onde porteuse. La tension instantanée de sortie de la figure. II.3.a montre que deux transistors d'une même branche (QI et Q4) ne peuvent conduire à la fois. Les mêmes signaux de commande peuvent être générés en utilisant une porteuse triangulaire unidirectionnelle comme l'indique la figure II.3.b.
La tension efficace de sortie peut être variée en variant l'indice de modulation M. On peut observer que la zone de chaque impulsion correspond approximativement à la zone au-dessus de l'onde sinusoïdale entre la moitié des points adjacents de la fin de la période au début des signaux de commande. Si δm, est la largeur de la mième impulsion, la tension efficace de sortie peut être écrite sous la forme suivante :
V
0(∑
)
(II.9)
Ainsi, le coefficient de la série de Fourier de cette tension est :
∑ * ( ) ( )+
(II.10)
Pour n = 1,3,5… (2p-1)…
Cette technique réduit le facteur de distorsion mieux que la MLI multiple. Elle élimine toutes les harmoniques inférieures ou égales à (2p-1). Pour p=5, l’harmonique de rang le plus petit est le neuvième. Toutefois, la tension de sortie contient des harmoniques. Cette modulation repousse ces harmoniques dans le domaine des hautes fréquences autour de la fréquence de commutation fc, et ses multiples
C h a p i t r e I I : Différents type de commande « M L I »
Figure II.3.a : MLI sinusoïdale, génération des signaux de commande par une porteuse triangulaire sinusoïdale
b) Génération des signaux de Commande par une porteuse Triangulaire Unidirectionnelle :
Figure II.3.b : MLI sinusoïdale, génération des signaux de commande par une porteuse triangulaire unidirectionnelle.
La tension maximale de sortie de la fondamentale pour les commandes MLI et MLI sinusoïdale ; peuvent être approximativement trouvées par la relation suivante :
C h a p i t r e I I : Différents type de commande « M L I »
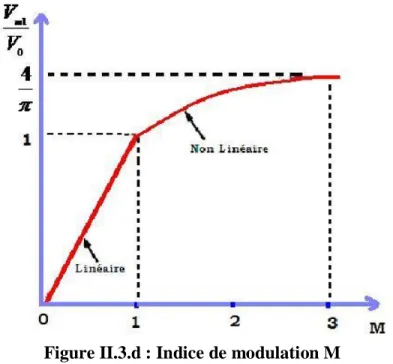
Pour d = l, on obtient l'amplitude maximale de la fondamentale de la tension de sortie, Vm1 (max) = Vs, Ainsi pour une onde de sortie carrée Vm1 (max) peut être plus grand que Vs/π = 1.273 Vs, en considérant l’équation de la tension de sortie d’un onduleur monophasé, c’est-à-dire :
∑
(II.11)On peut augmenter la fondamentale de la tension de sortie en choisissant « d » plus grand que l'unité. Ce mode de fonctionnements et appelé sur modulation.
La valeur à laquelle Vm1 (max)= 1.273Vs dépend du nombre d'impulsions «p» par demi cycle et est approximativement égale à 3 pour p=7 (voir la figure. II.3.d).
En réalité, cette sur modulation emmène l'opération en onde carré et ajoute plus d'harmonique en comparant ce fonctionnement à celui dans la gamme linéaire (c'est à dire pour d=1).
Figure II.3.d : Indice de modulation M
La sur modulation est déconseillée dans des applications où on exige la minimisation des distorsions comme dans le cas des 'UPS'(uninterruptible power supplies).
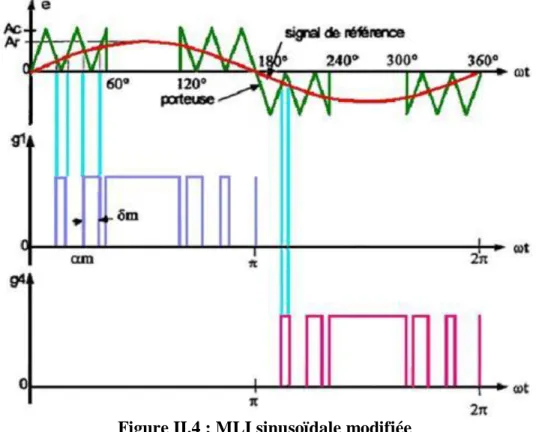
II.5.MLI sinusoïdale modifiée :
Selon la caractéristique de la MLI sinusoïdale, les largeurs des impulsions s'approchent de l'amplitude maximale de l'onde sinusoïdale pour ne pas changer significativement avec la variation de l'indice de modulation. Cela est dû à la caractéristique d'une onde sinusoïdale et la technique de MLI sinusoïdale peut être modifiée en appliquant l'onde sinusoïdale durant le début et la fin d'un intervalle de 60° par demi cycle; c'est à dire 0 à 60° et de 120° à 180°.Ce type de modulation est connu sous le nom de MLI sinusoïdale modifiée. La composante fondamentale
C h a p i t r e I I : Différents type de commande « M L I »
Figure II.4 : MLI sinusoïdale modifiée II.6. Commande par déplacement de phase :
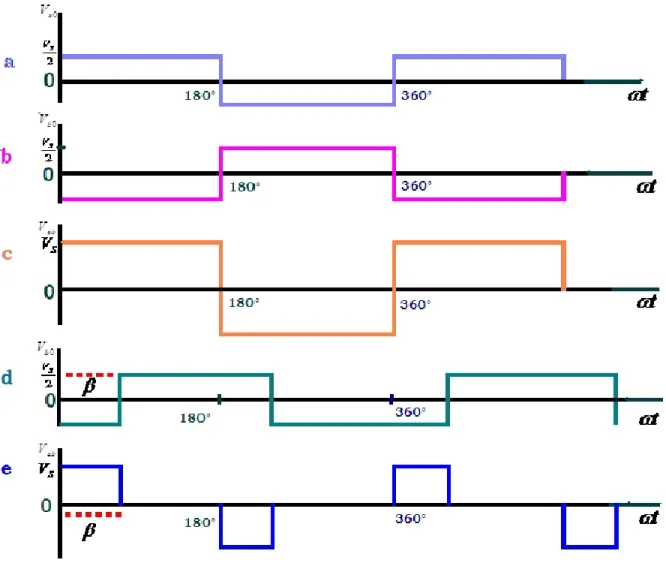
La tension de commande peut être obtenue en utilisant plusieurs onduleurs et en faisant la somme des tensions de sortie de ceux-ci.
Un onduleur à pont complet peut être perçu comme la somme de deux demi pont. Un déplacement de phase de 180° produit une tension de sortie comme l'indique la figure II.5.c, alors qu'un délai (déplacement) d'angle produit une sortie comme le montre la figure II.5.e.
La tension de sortie efficace est : V0 =Vs √
(II.12)
Si ∑
(II.13)
Alors ∑
(II.14)
La tension instantané de sortie,
∑
[
]
(II.15)
S achant que sin(a) -sin(b) =2sin [ (a -b)/2] .cos [ (a+b)/2] , l'équation précédente peut être simplifiée a :
∑ * +
(II.16)
La valeur efficac e de la fondamentale de la tension de sortie est :
(II.17)
C h a p i t r e I I : Différents type de commande « M L I »
C'est justement cette relation qui montre que la tension de sortie peut varier en fonction de la variation de l'angle β.
Ce t ype de commande est spécialement utile pour des applications de forte puissance exigeant un nombre important de transistor en parallèle.
Figure II.5: Contrôle par déplacement de phase. II.7. Contrôle de tension d'un onduleur triphasé :
Un onduleur triphasé peut être considéré comme étant trois onduleurs monophasés déphasés de 120°. Ainsi, les techniques que ces derniers utilisent, sont applicables aux onduleurs triphasés.
Par exemple, la génération des signaux de commande avec une MLI sinusoïdale est montrée sur la figure. II.6. On remarque que les trois ondes de référence sinusoïdales sont déphasées de 120° entre elles.
C h a p i t r e I I : Différents type de commande « M L I »
Figure II.6 : Onduleur MLI sinusoïdale triphasée. II.8.Conclusion :
Dans ce chapitre et d’après les études faites par les chercheurs, on déduit qu'aucune de ces techniques ne réduit de façon significative ce problème d'harmoniques.
La MLI permet de se rapprocher du signal désiré ; cependant cette technique est imparfaite. Le contenu des harmoniques généré par une onde MLI entraîne des pertes dans le réseau (pertes fer dans les transformateurs, pertes joule dans la ligne et le convertisseur), dans la charge (pertes joule, pertes fer et pertes par courant de Foucault).Elle génère dans les machines tournantes des oscillations du couple, des bruits acoustiques et des résonances électromagnétiques. Elles injectent du bruit sur la commande et introduit des non linéarités qui peuvent déstabiliser le système. Il est donc impératif de minimiser les harmoniques; ce qui fera l'objet de l'étude des techniques dites avancées.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
III.1 .In trodu ction :
La Modulation des largeurs d’impulsions sinusoïdale (MLIS) qui est généralement utilisée à une imperfection près, celle d'avoir une faiblesse fondamentale de la tension de sortie. Les autres techniques qui améliorent ces performances sont :
- Modulation trapézoïdale. - Modulation en escalier.
- Modulation en échelle (stepped). - Modulation par injection d'harmonique.
- Modulation delta- Modulation pré calculée (SHE).
Pour des raisons de simplification, nous allons montrer la tension de sortie, V, pour un onduleur à demi pont, et nous allons présenter les avantages et inconvénients de chaque technique.
Pour un onduleur à pont complet, V0,= Va0, - Vo, où Vo est l'inverse de Va0
III.2.Modulation trapézoïdale :
Les signaux de commande sont générés en comparant une onde porteuse triangulaire avec une onde modulante trapézoïdale comme le montre la figure (III.1). L'onde trapézoïdale peut être obtenue d'une onde triangulaire en limitant ses amplitudes à ± A r, l i é à l a v a l e u r maximale Ar (max.) par :
A
r= δA
r(max)
(III.1)
Où δ est appelé facteur triangulaire à cause de la forme de l'onde devenant triangulaire quand δ =1.
L'indice de modulation M est :
(III.2)
Pour 0 ≤ M ≤ 1L'angle de la partie continue de l'onde trapézoïdale est : 2φ = π (1-δ)
Pour des valeurs fixes de Ar(max) et Ac, M qui variait en fonction de la tension de sortie peut varier en changeant le facteur triangulaire δ.
Ce type de modulation augmente la fondamentale de la tension de sortie à 1.05 Vs, mais cette sortie contient des harmoniques d'ordre inférieur.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
Figure III.1 : Modulation trapézoïdale. III.3.Modulation en escalier :
Le signal de modulation est une onde en escalier comme l'indique la figure III.2. L'escalier n'est pas une approximation échantillonnée de l'onde sinusoïdale. Les niveaux de ces escaliers sont calculés pour éliminer des harmoniques spécifiques. Le taux de modulation de fréquence mf et le nombre d'escalier sont choisis pour obtenir la qualité désirée de la tension de sortie.
C'est une MLI optimisée et n'est pas recommandée pour un nombre d’impulsions inférieures à 15 par alternance. Il a été démontré dans les études que pour une valeur élevée de la fondamentale de la tension de sortie et un facteur de distorsion faible, le nombre optimum d'impulsions est de 15 pour deux niveaux ,21 pour trois niveaux et 27 pour 4 niveaux. Ce type de commande fournit une meilleure qualité de la tension de sortie avec une valeur fondamentale supérieure à 0.94 V.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
III.4. Modulation par échelle (stepped) :
Le signal modulé est une onde en échelle comme le montre la figure III.3. L’onde en échelle n’est pas une approximation échantillonnée de l’onde sinusoïdale. Elle est divisée en des intervalles spécifiques de 20°. Chaque intervalle commande séparément l’amplitude de la composante fondamentale et élimine les harmoniques correspondantes. Cette technique donne un taux de distorsion plus faible et une amplitude plus grande de la composante fondamentale comparée à la MLI normale.
Figure.III.3 Modulation en échelle. III.5. Modulation Delta :
Une onde triangulaire est utilisée pour osciller à l'intérieur d'une fenêtre définie Δ V comme l'enveloppe d'une onde sinusoïdale de référence Vr .La fonction de commutation de l'onduleur, identique à la tension de sortie V 0, est générée à partir de la
verticale de l'onde triangulaire Vc, comme le montre la figure III.4.Cette technique de commande est aussi connue sous le nom de "modulation d'hystérésis". Si la fréquence de l'onde modulée change en maintenant la pente de l'onde triangulaire constante, le nombre d'impulsions et les largeurs des impulsions de l'onde modulante changent aussi. La fondamentale de la tension de sortie peut être au-dessus de 1 V, e t dépend de l'amplitude maximale A, et la fréquence f r, de la tension de référence. La modulation delta peut commander le rapport de tension par rapport à la fréquence qui est une caractéristique désirable en contrôle des moteurs à courant alternatif.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
Figure.III.4 Modulation Delta. III.6. Modulation par injection d'harmoniques :
Le signal modulé est généré par injection d'harmoniques sélectionnées de l'onde sinusoïdale. Il en résulte une forme d'onde "plate" et une réduction de la sur modulation. Il fournit une grande amplitude de la fondamentale et une faible distorsion de la tension de sortie. Le signal modulé est généralement composé de :
Vr = 1.15 sinωt + 0.27 sin 3ωt - 0.029sin 9ωt
(III. 3)
Ce signal modulé avec la troisième et neuvième injection d'harmoniques est donné par la figure III.5.a. Il faut noter que l'injection de la troisième harmonique n'affecte pas la qualité de la tension de sortie fait que l'onduleur triphasé ne contiendra pas des harmoniques de multiple trois.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e Si on injecte seulement la troisième harmonique, Vr est :
Vr = 1.15 sinωt + 0.19 sin 3ωt
(III. 4)
Le signal modulé peut être généré pendant la durée de 2π/3 de l'onde comme le montre la figure III.5.b.Il en est de même que l'injection d'une troisième harmonique sur une onde sinusoïdale. La tension ligne-ligne est une MLI sinusoïdale et l'amplitude de la composante fondamentale est approximativement 15% supérieure que dans le cas d'une MLI sinusoïdale ordinaire. Ainsi, chaque branche est commutée à l'ouverture pendant un tiers de la période, ce qui réduit l'échauffement des dispositifs de commutation.
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
III.7 Modulation pré calculée : III.7.1 MLI monophasée :
Cette technique de modulation, qui est une méthode très efficace et très importante pour la commande des onduleurs deux niveaux afin d’améliorer beaucoup plus la qualité de leurs tensions de sortie. Elle consiste à former l’onde de sortie de l’onduleur d’une succession de créneaux de largeurs variables. Généralement, on utilise une onde qui présente une double symétrie par rapport au quart et à la demi- période. Cette onde est caractérisée par le nombre de créneaux ou d’impulsions par alternance. Que ce soit impair ou pair, ces angles suffisent pour déterminer la largeur de l’ensemble des créneaux ;On représente aussi le nombre d’angles de commutation par quart de période. Ces angles de commutation sont déterminés de telle façon à éliminer certains harmoniques. On peut s’intéressé par exemple à éliminer les premiers harmoniques (ex : 3, 5, 7, 9,11,…pour le monophasé et 5, 7, 11, 13, 17, … pour le triphasé) qui sont les plus gênants et donc indésirables pour le fonctionnement des charges telles que les moteurs électriques.
III.7.1.1 Décomposition en série de Fourier d’un signal MLI :
Les harmoniques paires dans la tension de sortie d’un onduleur monophasé peuvent être éliminées par l’introduction d’impulsion paire symétrique bipolaire
Figure III.7.1.1: Signal MLI.
La transformée de fourrier d’un signal alternatif périodique est donnée par :
U (t) = a0+∑ ) ))
(III.5)
= ∫ ) ) )
(III.6)
= ∫ ) ) )
(III.7)
Pour un signal périodique avec une symétrie sur le quart de période et une antisymétrique sur la demi- période, on a :
a0 = 0
(III.8)
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e
[
)
)
)
)
[ ∑ ) )]
Si on suppose que le signal U(t) a une amplitude vdc égal à ±1 et pour k impulsions alors
bn sera égal à :
[∫ ) ) ∫ ) ) ]+
∫ ) ) ∫ ) ) ∫ ) )
(III.10)
Et en utilisant l’expression suivante :
∫ ) ) ))
(III.11)
Les premiers et derniers termes deviennent :
∫ ) ) ))
(III.12)
∫ ) ) ( ) ) )
(III.13)
En intégrant les autres termes de l’équation (III.10) et en substituant les équations (III.12) Et(III.13) on aura :
))]
(III.14)
L’équation (III.10) contient K équations à K inconnues, le fondamental peut être contrôlé et(K-1) harmoniques peuvent être éliminés. Nous avons donc :) ∑ [ [ ∑ ) )] )]
(III.15)
Sachant que la valeur efficace est donnée par:
,
,……,
√ √ √
(III.16)
Nous obtenons le système d’équations suivant :
√ [ ) ) ) ) ) )]
√ [ ) ) ) ) ) )]
(III.17)
{ √ [ ) ) ) ) ) )]
Pour une commande à onde pleine (180°), le fondamental pour un montage en pont a
Chapitre III : T e c h n i q u e s de mo d u l a t i o n a v a n cé e Pour l’élimination de (K-1) harmoniques, on doit résoudre le système d’équation suivant :
[ ) ) ) ) ))] [ ) ) ) ) ))] [ ) ) ) ) ))] { [ ) ) ) ) ))]
0 < α
1< α
2< α
3<… π/2
(III.19)
III.7.1.2 La MLI programmée unipolaire :
Figure III.7.1.2 : Signal MLI unipolaire.
La décomposition de série de Fourier du signal MLI unipolaire pour k impulsion nous donne :
[ ∑ ) )]
(III.20)
Donc : ) ∑ [ [ ∑ ) )] )]
(III.21)
III.7.2.MLI triphasé :
Le point milieu de la source de tension est fictif. Les commandes des interrupteurs d’une même branche sont disjointes (et complémentaire pour l’onduleur monophasé).
La décomposition de série de Fourier donne :
[ ) ∑ ) )]
(III.22)
Dans ce cas aussi, on cherche à annuler les harmoniques sachant que ceux d’un rang multiple de 3 sont naturellement éliminés.
Les critères usuellement retenus sont pour la MLI recalculée : Elimination d’harmoniques de rang spécifié,
Elimination d’harmoniques dans une bande de fréquence spécifiée. Minimisation d’un critère d’harmonique global.
La modulation est caractérisée par M angles électriques. Ces angles M permettent : Soit d’annuler M harmoniques.
IV.1.Place de l’optimisation dans la démarche de conception en électrotechnique : IV.1.1 Introduction :
La conception économique et la mondialisation se traduit en terme de conception de produit industriel par trois axes principaux de progrès sur lesquels il faut inlassablement travailler : réduire le délai de la mise sur le marché, augmenter les performances des produits (simplicité, fiabilité, maintenance, robustesse…) et diminuer le coût de possession. Les outils dits de conception assistée par ordinateur sont aujourd’hui performants et permettent un gain de productivité considérable en intégrant plusieurs étapes du processus de conception et de fabrication d’un produit industriel. L’intervention de l’ingénieur reste encore cruciale, car c’est à lui que reviennent les tâches d’exploration de l’espace de conception et de décision pour le choix de la conception répondant le mieux au cahier des charges. Le développement des méthodes d’optimisation répond à ce besoin de l’ingénieur en l’assistant dans sa tâche de conception, en automatisant l’exploration de l’espace de conception et en lui garantissant l’obtention de la meilleure solution. L’intérêt de l’optimisation est non seulement de rationaliser la recherche de la solution au problème de conception mais également, de raccourcir le délai d’obtention de cette dernière et de contribuer ainsi à la maîtrise du coût de conception.
Durant ces dernières années, de nombreuses études ont été menées dans le domaine de l’optimisation comme le montre le nombre important de publications sur ce thème dans les revues du domaine. Aujourd’hui, l’optimisation s’applique à tous les domaines de la science et même à notre vie quotidienne. Chacun cherche souvent à mieux gérer son temps, son argent, minimiser certaines consommations, …, ce sont autant de problèmes d’optimisation.
Dans le domaine de l’automobile, la recherche d’une meilleure aérodynamique se pose depuis longtemps en termes d’optimisation de forme sous différentes contraintes : espace intérieur, faisabilité, sécurité, coût, etc. Dans l’industrie électronique, la réalisation de circuits à très haute échelle d’intégration conduit à la minimisation des distances entre connexions. En électrotechnique, un objectif est de diminuer le coût de possession d’un dispositif, en exploitant au mieux les matériaux de façon à minimiser les coûts de fabrication et augmenter le rendement. Ainsi, il convient de trouver la forme d’un dispositif qui permet d’obtenir une distribution particulière du champ magnétique, réduire le champ de fuite, etc.
Cette première partie est consacrée à l’exposé d’une méthodologie de conception applicable au domaine de l’électrotechnique. Elle s’appuie sur la résolution de problèmes d’optimisation sous contraintes.
IV.1. 2 Méthodologie de conception :
L’optimisation est souvent réduite aux techniques de résolution mathématiques auxquelles sont attribués par la suite les échecs rencontrés. Or, comme pour la plupart des problèmes que l’ingénieur est amené à résoudre, l’optimisation doit faire l’objet d’une démarche systématique qui comporte quatre phases récapitulées dans la figure IV.1.Les phases peuvent s’enchaîner séquentiellement mais les itérations et les retours sont bien souvent indispensables.
Analyse du cahier des charges :
Le cahier de charge, définit en amont, exprime les besoins des utilisateurs en termes de fonctions de service et contraintes à satisfaire.
A l’état initial, il est décidé que l’objet à concevoir doit assurer certaines fonctions dans un environnement donné : les fonctions de service. Il doit également satisfaire certaines exigences qui conditionnent son adoption par l’utilisateur final : les contraintes.
En général, l’objet à concevoir interagit avec son environnement. Un ou plusieurs phénomènes physiques sont nécessaires pour décrire ces interactions et constituent les modèles physiques comportementaux de l’objet.
Pour évaluer les performances de l’objet et vérifier qu’il répond aux exigences imposées, il est nécessaire de définir un ensemble de réponses de contrôle ainsi qu’un ensemble de facteurs sur lesquels il est possible d’agir. Facteurs et réponses sont liés à la nature et au comportement de l’objet ainsi qu’aux réactions de l’environnement.
La phase de rédaction du cahier des charges impose une caractérisation rigoureuse du dispositif à concevoir et n’est pas traitée ici. Elle peut s’appuyer sur des méthodologies et techniques de management de projets [CAZ 97].
Formulation du problème d’optimisation :
Cette phase consiste à traduire le problème de conception, décrit par le cahier des charges, en un problème mathématique équivalent. C’est l’étape la plus délicate du processus de conception car, là aussi, la formulation d’un problème n’est jamais unique, en particulier la définition des fonctions caractérisant les performances du système.
Elle consiste à définir de façon précise : 1. La fonction objective.
2. Les paramètres de conception.
3. Les éventuelles contraintes liées à la fabrication ou à l’utilisation du dispositif et donc exprimées dans le cahier des charges.
4. Les contraintes ajoutées par le concepteur.
La fonction objective est une des réponses de l’objet qui définit l’objectif à atteindre et peut être de deux natures : un coût à minimiser (coût de fabrication, consommation, coût d’exploitation, durée de développement) ou une performance à maximiser (profit, rendement, facteur de transmission). Son choix conditionne la définition du problème d’optimisation et inclus les moyens qui en permettent le calcul, c’est-à-dire la modélisation retenue pour l’objet.
Dans le cas d’un objective unique, le choix de cette fonction est évident. Par exemple, dans le cas où le but est de trouver les caractéristiques d’un dispositif produisant des performances dont les valeurs sont spécifiées, la fonction objective peut prendre comme expression l’écart entre les performances et les spécifications. Cependant, les problèmes d’optimisation doivent souvent satisfaire des objectifs multiples dont certains sont concurrents. Plusieurs façons de traiter ces problèmes sont analysées dans ce chapitre.