Discrete Complex Analysis
Texte intégral
Figure




Documents relatifs
Then we use the equivalence between square function estimates and weighted inequalities (cf. [7, Chapter V]) to further reduce to proving a weighted inequality for an
In the present note we discuss two different ring structures on the set of holomorphic discrete series of a causal symmetric space of Cayley type G/H and we suggest a new
In [7], the authors define a curvature estimator for 2D shapes and a mean curvature estimator for 3D shapes, based on digital integral invariants.. Note that principal
Next, Section 3.5 concerns the specific properties [11,20] that allow us to avoid the full construction of the hypercube search space. Section 3.6 presents the polynomial-time
To identify network classes on which the problem is polynomial time solvable, we introduce two classes of networks by generalizations of tree-child networks through vertex
We extend here the work initiated by Doignon and Labarre [6], who enumerated unsigned permutations whose breakpoint graph contains k cycles, to signed permutations, and prove
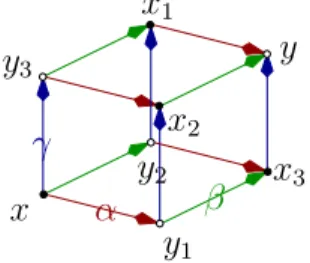
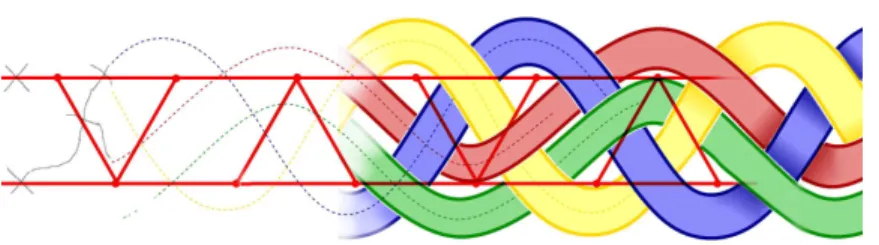
The number of positively oriented train-tracks plus one (for the constant function 1) is equal to the dimension of discrete holomorphic functions.. Appendix:
We show that the DMOC (Discrete Mechanics and Optimal Control) approach is equivalent to a finite difference discretization of Hamilton’s equations by a symplectic partitioned
