Apports du couplage non-intrusif en mécanique non-linéaire des structures
Texte intégral
Figure
Documents relatifs
La méthode intégrale présentée dans cette étude permet de traiter aussi bien 1 'écoulement bidimensionnel que l'écoulement tridimensionnel d'un fluide par- fait et
Mots clés – Vibrations non linéaires, amortissement, réponse dynamique, balance harmonique, méthode de Galerkin, modèle analytique, simulations par éléments finis....
Si les éléments discrets ont l’inconvénient d’être très gourmands en temps de calcul, les éléments finis demandent une discrétisation moins fine pour une utilisation dans une
Plus particulièrement, l’objet du travail est d’implanter un modèle hydromécanique couplé pour les sols gonflants dans un code de calcul aux éléments finis intégrant le
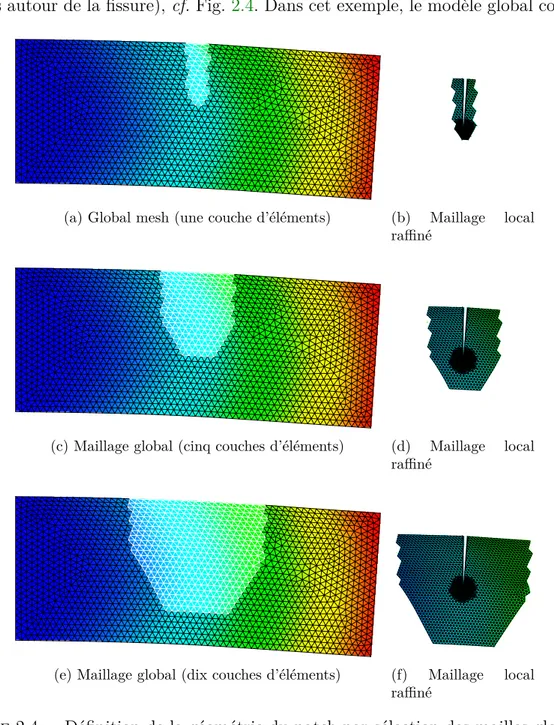
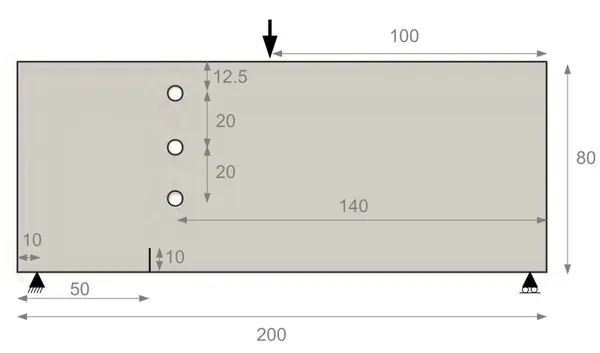
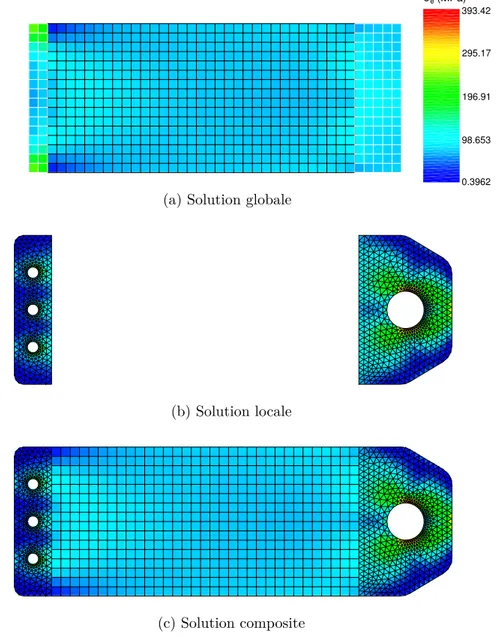
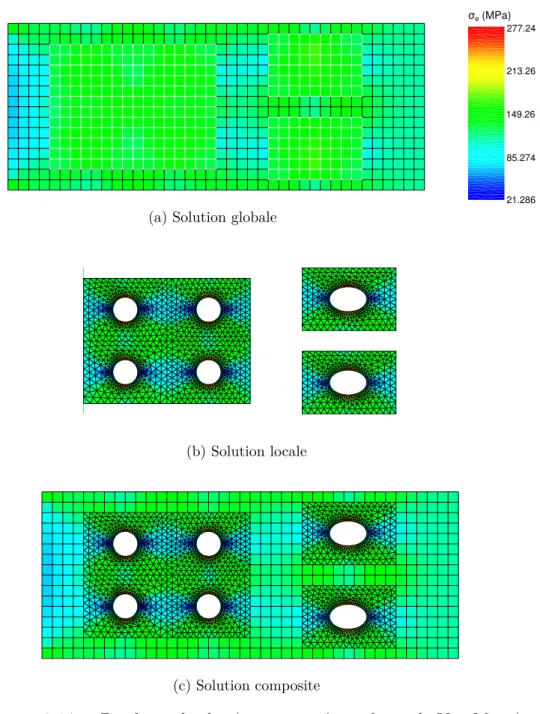
Cette thèse propose une stratégie de raffinement localisé adaptatif en espace pour les problèmes de statique et en espace temps pour les problèmes de dynamique transitoire dans le
Dans la première partie, on décrit une approche à objets en Java permettant de gérer efficacement les problèmes à champs multiples dans un cadre éléments finis..
Pour augmenter la précision des modèles en éléments finis pour représenter les fissures et, dans certains cas, pour améliorer la stabilité numérique de la solution, l’effet du
Dans ce travail, nous présentons un modèle éléments finis permettant la simu- lation de la propagation des ondes dans un tissu mou incompressible, utilisant une intégration
