On Averaging the Best Samples in Evolutionary Computation
14
0
0
Texte intégral
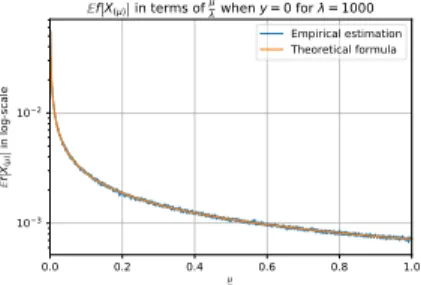
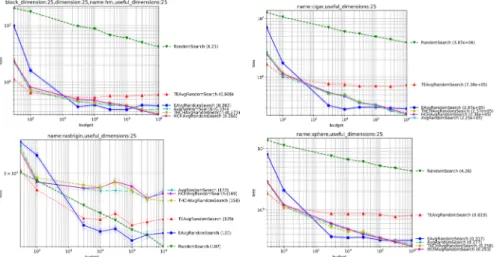
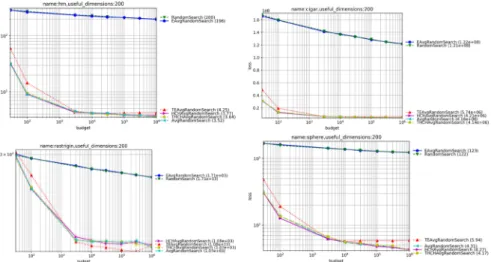
Figure
Documents relatifs