Exploitation d'indices visuels liés au mouvement pour l'interprétation du contenu des séquences vidéos
79
0
0
Texte intégral
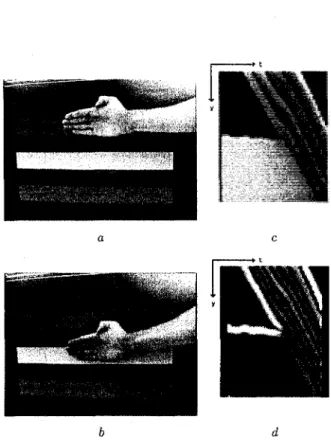
Figure
+7

Documents relatifs