UNIVERSITE TOULOUSE III-Paul Sabatier
THESE
en vue de l’obtention de
Doctorat de l'Université de Toulouse
délivré par l’Université TOULOUSE III-Paul Sabatier
Discipline : AUTOMATIQUE
présentée et soutenue Par
Yaman JANAT
le 30 novembre 2007COMMANDE CRONE MONOVARIABLE ET MULTIVARIABLE
DE SYSTEMES PEU AMORTIS
Directeur de thèse : M. Alain OUSTALOUP Co-directrice de thèse : Mme Valérie BUDINGER
JURY :
M. Luc DUGARD Président
M. Jean-Claude TRIGEASSOU Rapporteur
M. Mohammed MSAAD Rapporteur
M. Boutaib DAHHOU Examinateur
M. Alain OUSTALOUP Directeur de thèse
Remerciements
Je remercie particulièrement mon directeur de thèse Monsieur le Professeur Alain OUSTALOUP et ma Co-Directrice de thèse Madame Valérie POMMIER-BUDINGER, pour leurs nombreux conseils, leurs encouragements et pour la confiance qu’ils m’ont accordée durant toutes les étapes de cette thèse.
Je remercie Monsieur Patrick LANUSSE, Maître de Conférences à l’Université de Bordeaux I, pour m’avoir fourni des informations utiles, lors de nos réunions d’avancement et d’orientations.
Je tiens à remercier Monsieur Claude Nouals, Directeur du Département Avionique et Systèmes de l’ENSICA, pour m’avoir accueilli dans son laboratoire.
Je remercie vivement Messieurs Jean-Claude TRIGEASSOU et Mohammed MSAAD d’avoir accepté la charge de rapporteur de cette thèse.
Je remercie Messieurs Jacques BERNUSSOU, Boutaib DAHHOU et Luc DUGARD pour avoir bien voulu me faire l’honneur de participer à ce jury.
Mes remerciements vont ensuite à tout le personnel du laboratoire
d’Avionique et Systèmes de l’ENSICA et plus particulièrement à Madame Françoise Desperon et Messieurs Mohammad-Zied AMRA et Joël Bordeneuve-Guibé pour l’aide qu’ils m’ont apportée lors de ce travail. J’ai été bien ravi de travailler au sein de cette équipe dynamique et chaleureuse.
Je remercie du fond du coeurs ma famille ici en France et en Syrie pour leur soutien et leur amour qui m’ont encouragé au long de ma vie.
- 9 -
Sommaire
Introduction générale et organisation de la thèse ... 15
Chapitre 1 : Procédés d’étude ... 21
1.1 - Introduction ... 21
1.2 - Matériaux pour le contrôle actif ... 21
1.2.1 – Alliages à mémoire de forme ... 21
1.2.2 – Matériaux magnétostrictifs ... 22
1.2.3 – Matériaux piézoélectriques ... 23
1.3 - Dimensionnement d’une structure active à base de céramiques piézoélectriques ... 24
1.3.1 – Modélisation de la structure active ... 25
1.3.2 – Utilisation des paramètres électromécaniques pour le dimensionnement d’une structure ... 27
1.3.2.1 – Calcul de l’amplitude vibratoire par rapport à la contrainte du champ électrique maximal ... 28
1.3.2.2 – Calcul de l’amplitude vibratoire par rapport aux contraintes mécaniques (rupture des céramiques piézoélectriques) ... 29
1.3.2.3 – Résultat final : amplitude vibratoire en tenant compte des contraintes électriques, mécaniques et des incertitudes de la méthode ... 29
1.4 – Présentation des procédés d’étude de la thèse ... 29
1.4.1 – Poutre encastrée-libre ... 29
1.4.2 – Aile d’avion avec réservoir ... 32
1.5 Conclusion ... 35
Chapitre 2 : Contours d’isoamortissement ... 37
- 10 -
2.2 - Degré de stabilité ... 38
2.2.1 - Espace des temps ... 38
2.2.2 - Espace des fréquences ... 40
2.3 - Contours de performance ... 44
2.3.1 - Enveloppe de gabarits généralisés comme contour de performance ... 44
2.3.2 - Gabarit généralisé et intégration non entière complexe ... 45
2.4 - Construction des contours d’isoamortissement... 48
2.5 - Expression analytique des contours ... 53
2.5.1 – Equation du contour ... 53
2.5.2 – Equation de la tangente ... 54
2.6 – Conclusion ... 55
Chapitre 3 : Commande CRONE monovariable de systèmes peu amortis ... 57
3.1 – Introduction ... 57
3.2 – Principe de la commande CRONE ... 58
3.2.1 – Introduction à la commande CRONE ... 58
3.2.1.1 – Principe de la commande CRONE de première génération... 58
3.2.1.2 – Principe de la commande CRONE de deuxième génération ... 59
3.2.1.3 – Principe de la commande CRONE de troisième génération ... 60
3.3 – Développement calculatoire relatif à la commande CRONE de troisième génération ... 62
3.3.1 – Forme générale ... 62
3.3.2 - Transmittance de description du gabarit généralisé bornée en fréquences ... 63
3.3.2.1 – Module et argument de la réponse en fréquences ... 64
3.3.2.2 – Pente du gabarit généralisé ... 65
3.3.3 – Caractéristiques du transfert en boucle ouverte ... 67
3.3.3.1 – Module et argument de la réponse en fréquences ... 67
3.3.3.2 – Pente de la tangente... 67
- 11 -
3.4 – Commande CRONE de systèmes peu amortis ... 69
3.4.1 – La problématique ... 69
3.4.2 – Extension du transfert en boucle ouverte ... 70
3.5 – Exemple d’application ... 75
3.5.1 – Modélisation du procédé d’étude ... 75
3.5.2 – Synthèse de la loi de commande ... 77
3.5.2.1 – Cas d’étude n°1 ... 78
3.5.2.2 – Cas d’étude n°2 ... 81
3.5.3 – Résultats d’essais ... 83
3.5.3.1 – Essais du cas d’étude n°1 ... 84
3.5.3.2 – Essais du cas d’étude n°2 ... 85
3.6 – Conclusion ... 86
Chapitre 4 : Commande CRONE multivariable de systèmes peu amortis ... 89
4.1 – Introduction ... 89
4.2 – Principe de la commande CRONE multivariable des procédés stables et à minimum de phase ... 89
4.2.1 – Matrice de transfert en boucle ouverte découplante ... 89
4.2.2 – Conditions d’existence du régulateur ... 92
4.2.3 – Définition des domaines d’incertitude dans le cas multivariable ... 93
4.2.4 – Optimisation du comportement en boucle ouverte ... 94
4.3 – Cas des procédés peu amortis ... 95
4.4 – Exemple d’application ... 97
4.4.1 – Modélisation et identification du procédé ... 97
4.4.1.1–Préliminaire : rappel sur la réduction de modèle ... 98
4.4.1.2 – Forme du modèle ... 100
4.4.1.3 – Identification du modèle... 101
4.4.1.4 – Résultats de l’identification ... 103
4.4.2 – Synthèse de la loi de commande CRONE multivariable ... 108
4.4.2.1 – Conditionnement de la matrice de transfert en boucle ouverte nominale ... 108
4.4.2.2 – Résultats des calculs de la loi de commande ... 110
- 12 -
4.5–Conclusion ... 121
Conclusion générale et perspectives de la thèse ... 123
- 15 -
Introduction générale et organisation de la thèse
1 - Contexte d'étude
La réduction des vibrations et des nuisances sonores générées par ces dernières, est un problème majeur dans le secteur industriel.
Différents types d’applications peuvent être citées [Fun91, Pee96]:
en optique, pour améliorer le positionnement des miroirs dans les télescopes ou pour stabiliser les images,
dans l’industrie électronique, pour positionner les composants avec une grande précision,
dans les machines-outils, pour augmenter la vitesse de déplacement des outils tout en améliorant leur positionnement,
dans le transport, pour augmenter le confort et réduire le bruit,
dans le sport, pour diminuer les vibrations sur les skis et réduire les nuisances sur les genoux des skieurs.
Deux techniques de réduction de vibrations sont envisageables :
La première technique, passive, est l’isolation vibratoire qui consiste à ajouter des matériaux viscoélastiques pour éviter la transmission des vibrations sans pour autant diminuer les vibrations de la source. Toutefois, les propriétés d’amortissement de ces matériaux peuvent être dépendantes des conditions d’utilisation comme par exemple la température. De plus, pour les basses fréquences, des quantités importantes peuvent être nécessaires, amenant une masse supplémentaire à la structure [Ker59, Ros59].
La deuxième technique, active, met en œuvre des actionneurs. Ceux-ci sont utilisés soit pour produire une source de vibrations secondaire en opposition avec la première, la résultante des deux sources devant aboutir à l’annulation des vibrations [Gar97], soit pour augmenter l’amortissement de la structure pour diminuer l’amplitude des vibrations [Cra89a, Cra89b, Hag90].
- 16 -
Cette thèse met en œuvre la deuxième technique avec des inserts piézoélectriques collés sur la structure à amortir et fonctionnant comme des actionneurs qui peuvent être contrôlés de manière à améliorer l’amortissement de cette structure.
La stratégie de contrôle utilisée dans cette thèse s’appuie sur les contours d’isoamortissement, résultats de la recherche menée par Alain Oustaloup à partir de la théorie de la dérivation non entière [Ous95b]. Ces contours sont destinés à jouer un rôle similaire aux contours de Nichols. La graduation du contour de Nichols tangeant au lieu de Nichols en boucle ouverte, est significative du premier dépassement de la réponse libre ou indicielle en asservissement ou en régulation. De même, la graduation du contour d’isoamortissement tangeant au lieu de Nichols en boucle ouverte, est significative du facteur d’amortissement en asservissement et en régulation.
Les contours d’isoamortissement sont particulièrement adaptés au contrôle de vibrations. En effet, l’amplitude des vibrations d’une structure est étroitement liée à son facteur d’amortissement : plus une structure est faiblement amortie, plus elle vibrera lorsqu’elle sera excitée sur ses modes de résonance. Contrôler l’amortissement d’une structure permet donc de contrôler les vibrations [Bai85].
Un des autres résultats des travaux d’Alain Oustaloup est la commande CRONE, abréviation de Commande Robuste d'Ordre Non Entier [Ous91, Ous99a, Ous99b]. Cette commande a pour objectif la robustesse du degré de stabilité de la commande vis-à-vis des incertitudes du procédé. Le degré de stabilité est mesuré par le facteur de résonance en asservissement ou le facteur d'amortissement en asservissement et en régulation et les incertitudes sont prises en compte à travers les véritables domaines qu’elles définissent, conférant ainsi à la commande CRONE un caractère non pessimiste [Lan94, Sab98, Hot98].
L’objectif de cette thèse est la commande de procédés incertains peu amortis monovariables ou multivariables. Les outils mis en œuvre sont les contours d’isoamortissement et la commande CRONE.
- 17 -
2 - Organisation de la thèse
Le chapitre 1 est consacré à la description des procédés d’étude auxquels sera appliquée la méthodologie de commande CRONE de systèmes peu amortis. Les deux procédés sont des supports mettant en œuvre des actionneurs et des capteurs piézoélectriques pour du contrôle actif de vibrations. Le premier procédé est un système monovariable et le second un système multivariable, permettant ainsi l’application de la commande CRONE dans deux configurations différentes. Le premier procédé est une maquette simple composée d’une poutre encastrée-libre soumise à la flexion uniquement. Le second procédé est une maquette simplifiée d’aile d’avion et soumise à la fois à la flexion et à la torsion. Il s’agit en fait d’une poutre elle-aussi encastrée-libre et équipé d’un réservoir avec différents niveaux de remplissage.
Le chapitre 2 rappelle les notions de degré de stabilité et présente les contours d’isoamortissement comme des contours de performance. La construction de ces contours moins usités que les contours de Nichols est également rappelée. Celle-ci repose sur la technique des enveloppes et utilise le gabarit généralisé, c’est-à-dire la partie rectiligne du lieu de Nichols du transfert non entier en boucle ouverte de la commande CRONE de troisième génération.
Le chapitre 3 est consacré à la commande CRONE monovariable de systèmes peu amortis. Après la présentation de la commande CRONE de troisième génération et de son extension aux procédés résonants, celle-ci est mise en œuvre sur le premier procédé. L’objectif est le contrôle du premier mode de flexion de la maquette. Deux cas d’étude sont traités. Le premier cas concerne la synthèse d’un contrôleur afin d’obtenir une structure amortie avec un coefficient d’amortissement de 0.1 et le second cas concerne la synthèse d’un contrôleur afin d’obtenir une structure amortie avec un coefficient d’amortissement de 0.7.
Le chapitre 4 présente la commande CRONE multivariable de systèmes peu amortis. Le principe de la commande CRONE multivariable est dans un premier temps explicité. L'approche multivariable est fondée sur la préparamétrisation non entière complexe de la matrice de transfert en boucle ouverte nominale. Un ensemble de gabarits associé à la boucle ouverte assure le degré de stabilité et le découplage de la commande. L'optimisation consiste à rechercher l'ensemble de gabarits qui minimise les variations du degré de stabilité sous des contraintes de calibrage des éléments des fonctions de sensibilité nominales et reparamétrées. L’extension de la méthode CRONE multivariable aux procédés peu amortis a soulevé le problème de la présence de modes dans la matrice inverse du procédé différents de ceux de la
- 18 -
matrice du procédé. Ce chapitre présente une solution à ce problème et propose l’application de la commande CRONE multivariable au second procédé d’étude, à savoir la maquette simplifiée d’une aile d’avion. Cette application permet d’expliciter clairement la méthodologie et de montrer l’efficacité de la commande CRONE multivariable.
- 21 -
Chapitre 1
Procédés d’étude
1.1 - Introduction
Avant d’expliciter la méthodologie de commande, ce chapitre présente les procédés sur lesquels sera appliquée la commande CRONE. Ces procédés sont des supports pour du contrôle actif de vibrations élaborés à l’ENSICA. Ce chapitre débute par une présentation des matériaux qui peuvent être utilisés pour le contrôle actif puis se poursuit avec une méthodologie de dimensionnement dans le cas d’actionneurs piézoélectriques. La dernière partie du chapitre est consacrée à la présentation des maquettes.
1.2 - Matériaux pour le contrôle actif
Les matériaux utilisés pour le contrôle actif sont des matériaux dits « intelligents ». Ils possèdent des fonctions qui leur permettent de se comporter à la fois comme un capteur et un actionneur ou parfois comme un processeur (traiter, comparer, stocker des informations). Ces matériaux sont capables de modifier spontanément leurs propriétés physiques, par exemple leur forme, leur viscoélasticité ou leur couleur, en réponse à des excitations naturelles ou provoquées venant de l'extérieur ou de l'intérieur du matériau [Akh00, Cul92, Mcd94].
Les plus courants de ces matériaux intelligents sont les alliages à mémoire de forme (AMF), les matériaux piézo-électriques et les matériaux magnétostrictifs.
1.2.1 - Alliages à mémoire de forme
Déformés à froid, les alliages à mémoire de forme retrouvent leur forme de départ au-delà d'une certaine température par suite d'un changement de phase. Le principe physique de base repose sur une transformation réversible (modification de la structure cristalline), en fonction de la température. Ces alliages sont le plus souvent fabriqués à base de nickel-titane avec différents éléments d'addition comme du cuivre, du fer, du chrome ou de l'aluminium.
- 22 -
Les alliages à mémoire de forme peuvent servir aussi bien de capteur que d’actionneur. Dans ces deux cas, ils ne sont utilisés qu’à basse fréquence et pour des applications ne nécessitant pas une grande précision, essentiellement du fait de la difficulté du refroidissement. De tels matériaux sont assez peu utilisés pour le contrôle des vibrations. Des exemples d’objets en alliage à mémoire de forme sont présentés surla figure (1.1).
Figure 1.1 : Exemples des alliages à mémoire de forme
1.2.2 - Matériaux magnétostrictifs
Les matériaux magnétostrictifs peuvent se déformer sous l'action d'un champ magnétique. La déformation est proportionnelle au carré de la puissance du champ appliqué. Ces matériaux vont être capables de s'adapter automatiquement à l'environnement en prenant des formes utiles en réaction à des sollicitations extérieures d'ordre acoustique, vibratoire, mécanique ou thermique. L'effet magnétostrictif est, en général, moins important que l'effet piézoélectrique.
Quelques exemples de dispositifs magnétostrictifs commerciaux sont présentés dans la figure (1.2).
- 23 -
1.2.3 - Matériaux piézoélectriques
L’effet piézoélectrique peut être défini comme l’interdépendance entre des phénomènes mécaniques (déformations, contraintes) et des phénomènes électriques (champ électrique, charges électriques) que présentent certains matériaux [Cud89, Mou90]. Parmi les matériaux les plus classiques, citons les milieux cristallins (quartz, titanate de baryum, oxyde de zinc, monocristaux PZN-PT), les céramiques (PZT) et les polymères (PVDF).
Le phénomène de piézoélectricité (effet direct) a été démontré expérimentalement par les frères Pierre et Jacques Curie en 1880. L’expérience consista à mesurer les charges électriques apparaissant à la surface d’un cristal sous l’application d’une contrainte (figure (1.3)). Un an après, en 1881, l’effet piézoélectrique inverse, c’est-à-dire la déformation du cristal induite par application d’un champ électrique, fut démontré grâce à des considérations thermodynamiques par G. Lippmann. L’existence de l’effet piézoélectrique inverse fut confirmée expérimentalement par les frères Curie.
F
V
x
Figure 1.3 : Effet piézoélectrique direct : lorsqu’une force est appliquée sur la céramique,
une tension apparaît à ses bornes.
Quelques exemples de composants piézoélectriques commerciaux sont présentés sur la figure (1.4)
- 24 -
Le tableau (1.1) résume les avantages et inconvénients de ces principaux matériaux intelligents.
matériaux Mémoire
de forme
magnétostrictifs piézoélectriques Force motrice champ thermique champ magnétique champ électrique
Composition TiNi, CuAlBe TbFe, (TbDy), Fe,
SmFe PZT, PVDF, Quartz Avantages - force importante - densité énergétique importante - résistance importante - grande élasticité - contrôle sans contact - hautes fréquences - hautes variations de température - densité énergétique importante - grande bande passante - hautes fréquences - faible puissance de mise en action Inconvénients - basse fréquence - faible bande passante - variations de température limitées - hystérésis - tensions limitées - équipement pour génération du champ magnétique - matériaux fragiles - tensions limitées - équipement auxiliaire nécessaire - matériaux fragiles - variations de température limitées
Tableau 1.1 : Comparaison des matériaux intelligents [Ric06]
Les applications envisagées dans le cadre de cette thèse nécessitant une densité énergétique importante et une certaine largeur de bande passante, les matériaux choisis pour activer les structures sont de type piézoélectrique.
1.3 - Dimensionnement d’une structure active à base de céramiques
piézoélectriques
Une structure active est un système doté de capteurs, d’actionneurs et d’une unité de commande et de contrôle qui reçoit les données des capteurs et envoie des ordres aux actionneurs [Cul96, Sri01, Ful96]. Dans le cadre de cette thèse, les actionneurs et capteurs mis en œuvre sont des matériaux piézoélectriques utilisés pour du contrôle de vibrations [Cra87, Gar91].
La méthodologie de dimensionnement présentée ici est le résultat des travaux de [Bud03,Ric06]. Le dimensionnement permet de calculer le volume de céramiques piézoélectriques qu’il faut coller sur la structure pour annuler des vibrations qui seraient
- 25 -
générées par un effort extérieur. Ce dimensionnement s’appuie sur le modèle de la structure active.
1.3.1 - Modélisation de la structure active
La structure résonante est modélisée pour chaque mode dans une direction par une représentation masse-ressort. Pour chacun de ces modes sont calculés les masse et raideur modales équivalentes, ainsi que le paramètre caractérisant le couplage électromécanique des céramiques piézoélectriques. Ces calculs s’effectuent par une méthode vibrationnelle à partir des équations de Lagrange [Ger97, Haa00, les88].
Pour un milieu purement mécanique, dont la description cinématique peut se réduire à un ensemble de coordonnées généralisées qj, le Lagrangien L s’écrit sous la forme :
V T
L , (1.1)
où :
T est l’énergie cinétique du milieu en mouvement :
d u T 2 2 1 , (1.2)
u désignant le champ de déplacement ;
V est le potentiel des forces conservatives comme celles des déformations élastiques : d S T V ij ij 2 1 , (1.3)
Tij et Sij désignant les tenseurs de contraintes et de déformations.
Ce Lagrangien vérifie pour chacune des coordonnées généralisées :
e j j j F q L q L dt d , (1.4)
aFje représentant la composante des forces extérieures qui travaillent selon de degré de liberté
qj. et pouvant s’obtenir en dérivant le travail virtuel W des forces extérieures :
j j ju F W soit j e j u W F . (1.5)
Pour obtenir un modèle à un degré de liberté valable pour un mode de résonance, il suffit de dériver ce Lagrangien selon une coordonnée généralisée q. On obtient alors l’équation mécanique caractéristique de la structure :
- 26 - e F Kq q M , (1.6) avec M : la masse modale (Kg), K : la raideur modale (N/m).
Pour une structure active intégrant des éléments piézoélectriques, ces éléments collés sur la structure mécanique génèrent un effort résultant d’un couplage électromécanique. Ce couplage se traduit par l’ajout de :
d D E d dE D dv q x v W i i i i v o C v E 2 1 ) , ( , le potentiel de la coénergie
électrique, au V des forces de déformation élastique,
v.qc, l’énergie fournie par l’alimentation, au travail des forces mécaniques.
Le Lagrangien d’une structure active à base de céramiques piézoélectriques prend donc finalement pour expression :
d D E S T u v q q L j j 2 ij ij i i 2 1 , , . (1.7)
Toujours pour obtenir un modèle à un degré de liberté valable pour un mode de résonance, toutes les déformations au sein de la structure sont exprimées en fonction d’un seul paramètre géométrique q qui servira de coordonnée mécanique généralisée. L’intégration des différentes composantes du Lagrangien donnera une fonction de la forme :
Nvq v C Kq q M v q q L j j 2 0 2 2 2 1 2 1 2 1 , , , (1.8) avec : M : la masse modale (Kg), K : la raideur modale (N/m),
N : le facteur d’effort qui exprime le couplage électromécanique (N/V), C0 : la capacité bloquée de la structure (F).
- 27 -
La différentiation de ce Lagrangien selon les coordonnées q et v permettra d’obtenir les équations caractéristiques de la structure :
Equation mécanique : e F Nv Kq q M , (1.9) Equation électrique : v C Nq qc 0 . (1.10)
Ces équations sont caractérisées par les paramètres électromécaniques M, K et N qui caractérisent le comportement dynamique de la structure avec la céramique piézoélectrique.
Le terme N est primordial pour évaluer l’efficacité du contrôle actif. Il dépend [Hag90] :
des propriétés intrinsèques du matériau piézoélectrique (son module d’Young Ea, sa densité et son coefficient piézoélectrique d31 qui doit être le plus grand possible),
des dimensions (longueur, largeur et épaisseur) de l’actionneur par rapport à celles de la poutre.
La capacité bloquée C0 n’a pas d’influence sur les performances mécaniques pour une tension d’alimentation donnée mais impose le courant absorbé par la structure. Elle est donc dimensionnante pour l’alimentation qui pilotera le dispositif.
L’amortissement n’est pas ici pris en compte puisqu’aucun terme de dissipation n’a été introduit dans le Lagrangien. Cette approche est volontaire : les paramètres introduits jusqu’à présent peuvent être calculés par éléments finis à partir des dimensions et des matériaux de la structure. La prise en compte mathématique de la dissipation est beaucoup plus délicate et celle-ci sera obtenue par mesure sur la structure comme cela est expliqué dans le paragraphe suivant.
1.3.2 - Utilisation des paramètres électromécaniques pour le dimensionnement d’une structure
Les paramètres électromécaniques sont utilisés pour estimer l’amplitude des vibrations qui peuvent être générées par la structure équipée de céramiques piézoélectriques [Lee87, Mou90].
Il faut de plus tenir compte de la dissipation de la structure sous la forme d’un coefficient de frottement visqueux Ds. Ce coefficient peut être estimé à l’aide du facteur de
- 28 - KM Q D m s 1 . (1.11)
Le facteur de qualité est quant à lui mesuré à partir de la bande passante à –3dB, notée f, autour de la fréquence de résonance f0 :
f f
Qm 0 . (1.12)
Le dimensionnement s’effectue à partir de l’équation mécanique qui s’écrit, en prenant en compte le coefficient de frottement visqueux Ds et dans le cas où il n’y a pas d’effort
extérieur : Nv Kq q D q M s . (1.13)
1.3.2.1 - Calcul de l’amplitude vibratoire par rapport à la contrainte du champ électrique maximal
Ce calcul est effectué à partir de l’équation mécanique, sans tenir compte des contraintes à la rupture des céramiques piézoélectriques.
L’équation mécanique montre que, à la résonance, la structure alimentée par une tension v peut générer un effort Nv et produire des vibrations d’amplitude :
K NvQ D Nv q m s électrique max . (1.14)
L’amplitude des vibrations dépend donc du facteur d’effort N et de la tension v maximale applicable.
La tension maximale applicable est fonction du champ électrique maximal Emax auquel peut être soumis le matériau (en général autour de 400V/mm pour une céramique piézoélectrique) et de l’épaisseur de la céramique h, soit
h E
vmax max . (1.15)
L’amplitude maximale selon des critères électriques vaut donc :
s électrique D h NE q max max . (1.16)
- 29 -
1.3.2.2 - Calcul de l’amplitude vibratoire par rapport aux contraintes mécaniques (rupture des céramiques piézoélectriques)
Il est nécessaire de vérifier que l’amplitude des vibrations générées ne conduit pas à la rupture mécanique de la céramique. A partir de la contrainte en traction maximale de la céramique Tmax (de l’ordre de 25 MPa en traction) et du rapport « Contrainte/amplitude de la déformée » Tm/q qui peut être calculé par une méthode des éléments finis, une estimation de la déformée maximale avant rupture peut être estimée par la formule suivante:
q T T rupture q m max max . (1.17)
1.3.2.3 - Résultat final : amplitude vibratoire en tenant compte des contraintes électriques, mécaniques et des incertitudes de la méthode
Afin de tenir compte à la fois des contraintes électriques et mécaniques, il faut considérer le minimum des deux résultats précédents.
D’autre part, la modélisation étant basée sur un modèle simple, elle ne permet pas de tenir compte de tous les paramètres. Afin de tenir compte des erreurs de modélisation (le collage des céramiques et les assemblages mécaniques n’ont pas été pris en compte), le résultat final considéré correspond à 80% du minimum des deux résultats précédents.
Au final, l’amplitude maximale résultante vaut :
) ,
min( 8 .
0 max électrique max rupture
résultat q q
q . (1.18)
Cette grandeur permet de dimensionner une structure active dans le sens où elle permet de calculer le volume de céramiques piézoélectriques qu’il faut coller sur la structure pour annuler des vibrations qui seraient générées par un effort extérieur et qui auraient une amplitude de cette grandeur.
1.4 - Présentation des deux procédés d’étude de la thèse
1.4.1 - Poutre encastrée-libre
Le premier procédé est une maquette pédagogique qui sera utilisée pour tester une loi de commande CRONE monovariable pour systèmes peu amortis. Il s’agit d’une poutre en
- 30 -
aluminium avec des conditions aux limites de type encastrée-libre (figure (1.5)) [Lel02 ,Ric04]. Les caractéristiques du procédé sont données par le tableau (1.2).
Figure 1.5 : Poutre encastrée
Matériau Aluminium
Longueur L 300 mm
Largeur l 20 mm
Epaisseur e 2 mm
Module d’Young E 70 GPa
Masse Volumique 2970 kg/m3
Tableau 1.2 : Tableau des caractéristiques
En théorie, les fréquences propres pour une poutre encastrée-libre sont données par la formule : ² . . 2 1 . . 2 L e l EI fi i , (1.19) avec I, moment quadratique=l*e3/12,
i, un coefficient relatif à chacun des modes calculé à partir de la géométrie de la structure et des conditions aux limites [Rob01].
En appliquant la formule précédente, les différentes fréquences propres de la poutre du procédé d’étude sont données dans le tableau (1.3) :
Modes λi fi
Mode 1 1.875 18.3 Hz
Mode 2 4.694 114.5 Hz
Mode 3 7.854 320.7 Hz
Mode 4 10.995 628.5 Hz
- 31 -
Afin de contrer les vibrations, cette poutre est rendue « active » en l’équipant :
d’un actionneur piézoélectrique de type céramique PZT (P151 de PI Polytech) qui peut générer des vibrations qui vont modérer les vibrations perturbatrices de façon à obtenir une diminution globale des vibrations mécaniques sur la structure,
d’un capteur piézoélectrique de type céramique PZT (P151 de PI Polytech) qui permet de mesurer les vibrations de la structure.
Les caractéristiques du capteur et de l’actionneur sont données dans le tableau (1.4).
Actionneur Capteur
Matériau PZT P151 PZT P 151
Longueur L 50 mm 10 mm
Largeur l 20 mm 10 mm
Epaisseur e 0.5 mm 0.5 mm
Module d’Young E 60 GPa 60 GPa
Coefficient Piézoélectrique d31 210.10-12 210.10-12
Tableau 1.4 : Caractéristiques du capteur et de l’actionneur
L’actionneur et le capteur sont placés au niveau de l’encastrement car c’est la position où l’actionneur a le plus d’effet et où le capteur donne le plus de signal (voir figure (1.6)) [Gev70, Sim93]. Ils sont dits co-localisés car collés l’un au-dessous de l’autre de part et d’autre de la poutre.
Actionneur piézoélectrique
Capteur piézoélectrique
Figure 1.6 : Premier procédé de contrôle actif de vibrations
En appliquant la méthode de dimensionnement des structures actives exposée au paragraphe 1.3, il est possible de déterminer l’amplitude des vibrations qui pourraient être annulées avec une loi de commande appropriée. Pour ce premier procédé, avec un coefficient
- 32 -
de qualité mécanique de 100 et une alimentation de 130V, l’amplitude qui ne tient compte que de la contrainte du champ électrique maximal est de 48 mm et l’amplitude qui ne tient compte que de la contrainte mécanique est de 11 mm. Le résultat final est donc que les éléments actifs de cette structure permettent d’annuler des vibrations de 8,8 mm environ.
Pour finir le descriptif de ce premier procédé, précisons que, l’actionneur piézoélectrique étant alimenté avec une tension maximale de 130V à ses bornes et le signal de commande atteignant 10V au maximum, il est nécessaire d’avoir recours à un amplificateur de tension d’un gain de 13. Le capteur piézoélectrique, sensible aux déformations mécaniques, génère une variation de charges électriques qui est convertie en une tension - grandeur plus facilement exploitable - via un amplificateur de charges. Le signal issu de l’amplificateur est une tension image des vibrations dans la poutre. Enfin, afin de tester la robustesse de la commande CRONE qui sera implantée, quatre masses différentes peuvent être ajoutées à l’extrémité de la poutre.
Le schéma complet du procédé d’étude est représenté sur la figure (1.7).
Amplificateur de tension x 13 Actionneur piézoélectrique Capteur piézoélectrique -130 V -10V< entrée actionneur <+10V Sortie capteur : tension image des vibrations +130 V Loi de commande Calculateur D-Space Amplificateur de charges Masse additionnelle
Figure 1.7 : Schéma complet du premier procédé d’étude
1.4.2 - Maquette simplifiée d’aile d’avion avec réservoir
Le deuxième procédé étudié résulte d’une commande industrielle de Dassault qui souhaitait étudier à petite échelle le problème de l’interaction fluide/structure dans une aile d’avion. Ce procédé consiste donc en une maquette d’aile d’avion composée d’une poutre en aluminium encastrée-libre et d’un réservoir en acrylique (figure (1.8)). La maquette a été dimensionnée de manière à avoir les mêmes modes propres qu’une aile d’avion, c'est-à-dire le premier mode de flexion autour de 1 Hz, et à reproduire le phénomène de ballottement dû à l’interaction fluide/structure entre le réservoir et l’aile. Les caractéristiques de la maquette sont données dans le tableau (1.5). Le réservoir peut être rempli avec différents niveaux d’eau
- 33 -
à l’état liquide ou gelé de manière à représenter différents niveaux et états de remplissage d’un réservoir d’avion. Ces différents niveaux et états seront vus comme des incertitudes.
Figure 1.8 : Second procédé de contrôle actif de vibrations
Le contrôle actif des vibrations est réalisé grâce à deux actionneurs piézoélectriques collés au niveau de l’encastrement (figure (1.9)). Le fait d’avoir deux actionneurs permet de contrôler à la fois la flexion (même tension d’alimentation sur chaque actionneur) et la torsion (tensions d’alimentation opposées sur chaque actionneur). Le signal de mesure sera fourni par deux capteurs piézoélectriques co-localisés avec les actionneurs. Le dimensionnement de ces actionneurs est effectué dans le cas pour un réservoir de 70 cm. Pour un facteur de qualité de 100, la taille des actionneurs par rapport à la taille de la poutre (tableau (1.5)) permet de contrôler des vibrations d’une amplitude de 10 cm pour le premier mode de flexion et des vibrations d’une amplitude de 7 mm pour le premier mode de torsion.
Capteur haut (yh)
Capteur bas (yb)
Actionneur haut (uh)
Actionneur bas (ub)
Figure 1.9 : Positionnement des actionneurs et des capteurs piézoélectriques
- 34 - Poutre Actionneur x2 Capteur x2 Longueur (mm) 1360 140 25 Largeur (mm) 160 75 15 Epaisseur (mm) 5 0.5 0.5 Densité (kg/m3) 2970 7800 7800
Module de Young (Gpa) 75 67 67
Constante Piezoelectrique (pm/V) x -210 -210
Réservoir
Diamètre extérieur (mm) 110
Diamètre intérieur (mm) 105
Longueur (mm) 700
Positionnement sur la longueur (mm) 1280
Densité de l’eau (kg/m3
) 1000
Densité de l’acrylique (kg/m3) 1180
Module de Young (Gpa) 4,5
Tableau 1.5 : Caractéristiques du second procédé
L’objectif de la commande sur cette maquette sera le contrôle des deux premiers modes de flexion et du premier mode de torsion. Le problème peut être traité par une méthode multivariable pour système carré en considérant comme entrées les tensions appliquées sur les deux actionneurs et comme sorties les tensions issues des deux capteurs.
Le schéma de commande est semblable au premier procédé d’étude et est représenté sur la figure 1.10. La chaîne d’acquisition est composée de deux amplificateurs de charges (un pour chaque capteur piézoélectrique) et la chaîne de commande de deux amplificateurs de tension (un pour chaque actionneur piézoélectrique).
Capteur 2 (bas) Actionneur 1 (haut) Actionneur 2 (bas) Capteur 1 (haut) Amplificateur de tension 2 x 13 -10V< entrée actionneur <+10V Loi de commande Calculateur D-Space Amplificateur de charges 1 Amplificateur de charges 2 Amplificateur de tension 1 x 13 -10V< entrée actionneur <+10V
- 35 -
1.5 - Conclusion
Ce chapitre donne une description des procédés d’étude sur lesquels sera appliquée la commande CRONE de systèmes peu amortis. Il s’agit de deux structures de contrôle actif de vibrations à base de céramiques piézoélectriques. Le premier procédé est une maquette pédagogique de poutre encastrée-libre qui constitue un exemple de procédé monovariable et le second procédé plus original développé à l’ENSICA représente une maquette d’aile d’avion et pourra être traité comme un procédé multivariable carré de dimension deux.
- 37 -
Chapitre 2
Contours d’isoamortissement
2.1 - Introduction
Soit une structure de commande générique où la boucle de commande résulte de la mise en cascade d’un correcteur avec un procédé (perturbé et bruité). L’ensemble est sollicité par un signal d’erreur résultant de la comparaison de l’image de la sortie à l’image de la consigne [Oga02]. Cette configuration permet la définition de deux transmittances. Si la transmittance relative à une perturbation de sortie et au bruit qui caractérise la fonction régulation s’identifie toujours à la sensibilité S(p)=(1+ (p))-1, où (p) désigne la transmittance en boucle ouverte, la transmittance relative à la consigne qui caractérise la fonction asservissement s’identifie alors à la sensibilité complémentaire T(p)=1-S(p)= (1+ (p))-1(p). Les réponses indicielles en asservissement et en régulation sont ainsi linéaires entre elles. Elles sont donc du même type, notamment leur transitoire possède la même forme et présente donc le même caractère (apériodique ou oscillatoire). Leur dynamique est alors identique (même premier dépassement réduit ainsi que même fréquence propre et même facteur d’amortissement de leur mode oscillatoire).
Si la stabilité de la boucle de commande est entièrement conditionnée par le signe de la partie réelle des racines de l’équation caractéristique 1+(p)=0, le degré de stabilité constitue en revanche un concept dont le chiffrage s’avère plus délicat. Tant dans l’espace des temps que des fréquences, sa mesure est en effet donnée par des performances dynamiques qu’il convient de préciser.
Dans l’espace des temps, le degré de stabilité d’une boucle de commande se chiffre (ou se mesure) :
- soit par le premier dépassement réduit de la réponse libre ou indicielle en asservissement ou
en régulation, D’1 ;
- soit par le facteur d’amortissement en asservissement et en régulation, , caractérisant le taux de décroissance des dépassements du mode oscillatoire de la réponse libre ou indicielle
- 38 -
en asservissement ou en régulation, et défini comme le coefficient d’amortissement réduit de ce mode.
Dans l’espace des fréquences, le degré de stabilité est caractérisable par la « distance » au point critique. Une telle distance se mesure notamment :
- par les marges de stabilité que constituent les marges de gain et de phase ;
- par un contour d’amplitude de Nichols dont la graduation donne le facteur de résonance en asservissement Qa ; un tel contour correspond à un -cercle de Hall dans le plan de Nyquist. - par la marge de module qui peut être associée au contour d’amplitude de Oustaloup [Ous78] dont la graduation donne le facteur de résonance en régulation Qr ; ce contour correspond à un cercle centré sur le point critique dans le plan de Nyquist.
Dans le cadre des relations tempo-fréquentielles nécessaires à la synthèse d’une commande dans l’espace des fréquences, il convient de recenser les performances dynamiques temporelles, sachant que les spécifications des performances imposées par le concepteur relèvent du domaine temporel.
Autant le facteur de résonance en asservissement Qa est significatif du premier dépassement réduit D’1, un contour de Nichols réalisant ainsi un contour d’isodépassement [Bal92], autant le facteur de résonance en régulation Qr n’est significatif d’aucune performance dynamique temporelle. Notamment, bien qu’il paramètre un cercle centré sur le point critique (-1,0) et mesurant ainsi une véritable distance à ce point, il n’est pas pour autant significatif du facteur d’amortissement .
Aussi, afin que le chiffrage du degré de stabilité dans l’espace des temps admette son équivalent dans l’espace des fréquences, il semble opportun de définir une nouvelle mesure de la « distance » au point critique. Notamment, il convient de déterminer un nouveau contour (représenté en l’occurrence dans le plan de Nichols) dont la graduation soit significative du facteur d’amortissement (voire le donne directement), un tel contour réalisant alors un contour d’isoamortissement. En s’appuyant sur l’intégration non entière complexe [Ous91], une méthode de construction géométrique d’un réseau de contours d’isoamortissement est élaborée.
2.2 - Degré de stabilité
2.2.1 - Espace des temps
Dans l’espace des temps, le degré de stabilité d’une boucle de commande se chiffre (ou se mesure) :
- soit par le premier dépassement réduit de la réponse libre ou indicielle en asservissement ou en régulation, D’1 ;
- 39 -
- soit par le facteur d’amortissement en asservissement et en régulation, , caractérisant le taux de décroissance des dépassements du mode oscillatoire de la réponse libre ou indicielle en asservissement ou en régulation, et défini comme le coefficient d’amortissement réduit de ce mode.
Il est vrai qu’un mode oscillatoire résultant d’une paire de valeurs propres complexes conjuguées , 1 j 2 2 , 1 n n (2.1)
admet une expression générale de la forme :
), t cos( e ) (t C t p m (2.2)
où la fréquence propre p et le coefficient d’amortissement sont donnés par :
projectionde sur l'axeimaginaire
1 1 2 n p (2.3) et , n (2.4)
d’où l’on tire :
n
, (2.5)
rapport qui révèle que le facteur d’amortissement s’exprime par le cosinus du demi-angle au
centre que forment les valeurs propres 1 et 2 figure (2.1).
Par ailleurs, la relation(2.5) traduit que n’est autre que le coefficient
d’amortissement réduit par la fréquence propre non amortie n, la qualification « non
- 40 - Im[] 0 Re[] 2 1 n 2 1 n 2 n 1
Figure 2.1 : Représentation des valeurs propres dans le plan complexe : = cos
2.2.2 - Espace des fréquences
Dans l’espace des fréquences, le degré de stabilité est caractérisable par la « distance » au point critique. Une telle distance se mesure :
- soit par les marges de gain et de phase ; - soit par la marge de module ;
- soit par un contour d’amplitude de Nichols; - soit par un contour d’isoamortissement.
Les marges de stabilité que constituent les marges de gain et de phase sont bien connues. Elles sont rappelées sur la figure (2.2):
m R e (j) I m (j) GmdB u 0 arg (j) |(j) |dB GmdB (b) u 0 (a) m
Figure2.2 : Marges de gain et de phase : (a) dans le plan de Nyquist ; (b) dans le plan de
- 41 -
Un contour d’amplitude de Nichols est repéré par un paramètre dB qui exprime en décibel le facteur de résonance en asservissement, Qa. Un tel contour correspond à un -cercle de Hall dans le plan de Nyquist (figure (2.3)). Il réalise un contour d’isodépassement sachant que Qa est significatif du premier dépassement réduit D’1 (paragraphe 2.3).
Re (j) Im (j) dB ? (b) (a) Qa oudB
Figure 2.3 : Contours d’amplitude de Nichols (a) et de Hall (b)
Un contour d’amplitude de Oustaloup [Ous91] est repéré par un paramètre dB qui exprime en décibel le facteur de résonance en régulation, Qr. Ce contour correspond à un -cercle centré sur le point critique dans le plan de Nyquist (figure (2.4)) et de rayon Mm, la marge de module. Re (j) Im (j) dB ? (b) (a) Qr ou dB Mm
Figure 2.4 : Contour d’amplitude de Oustaloup (a) et sa transposition dans le plan de
Nyquist avec visualisation de la marge de module (b)
Un contour d’isoamortissement (paragraphe 2.3) est repéré par un paramètre compris entre 0 et 1 qui exprime directement le facteur d’amortissement en asservissement et en régulation, . Sa construction s’effectue par deux méthodes graphiques bien distinctes.
- 42 -
- La première est une méthode approchée intuitive qui utilise la symétrie, par rapport à l’axe des arguments, des contours d’amplitude de Nichols et de Oustaloup de même graduation [Ous91]. Partant de deux contours d’amplitude symétriques, l’un de Nichols et l’autre de Oustaloup, la méthode consiste en effet à tracer un contour symétrique dont l’ordonnée de chaque point n’est autre que la moyenne algébrique des ordonnées des points de même abscisse des deux contours d’amplitude (figure (2.5)). L’idée de cette méthode de construction résulte d’une étude empirique mettant en évidence la propriété suivante : deux lieux de Nichols en boucle ouverte qui tangentent respectivement (l’un par-dessus et l’autre par-dessous) le contour ainsi obtenu, conduisent régulièrement au même facteur d’amortissement en boucle fermée, qui plus est, identique à quelques pour cent près à celui qu’assure le gabarit vertical de la commande CRONE tangent à ce même contour.
dB ? (b) (a) dB dB un ? dB
Figure 2.5 : Construction approchée d’un contour d’isoamortissement (a)
et de sa paramétrisation (b)
Le paramètre qui repère ce contour peut être donné par le facteur d’amortissement qu’assure en boucle fermée le lieu de Nichols d’un intégrateur généralisé tangent à ce contour (figure (2.5b)), soit , cos n (2.6)
l’ordre d’intégration n (compris entre 1 et 2) étant tel que –n/2 est l’abscisse du point de tangence. En effet, la forme générale de l’équation caractéristique
0 ) ( 1 p (2.7) devient en l’occurrence : , 0 1 u n p (2.1)
- 43 - ou : , 0 1 u n p (2.9) ou encore : , e 1 j u n p (2.10)
d’où l’on tire :
, j u 2 , 1 n e p (2.11)
paire de valeurs propres complexes conjuguées, dont le cosinus du demi-angle au centre qu’elle forme détermine le facteur d’amortissement, soit
C.Q.F.D. . cos cos n n (2.12)
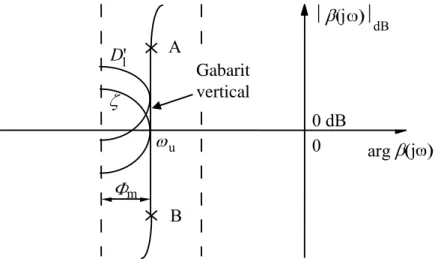
- La deuxième méthode utilise la technique des enveloppes (paragraphe 2.4) [Ous94]. Un contour d'isoamortissement est alors défini comme l'enveloppe que forme une famille de segments de droite. Ces segments de droite de direction quelconque autour de la fréquence au gain unité en boucle ouverte, appelés gabarits généralisés, constituent les parties rectilignes de lieux de Nichols en boucle ouverte qui assurent en boucle fermée le même facteur d'amortissement. A partir de la transmittance de description d'un gabarit généralisé fondée sur l'intégration non entière complexe, l'équation caractéristique de la boucle fermée est établie. Lorsque la paire de racines complexes conjuguées dont résulte le mode oscillatoire en boucle fermée décrit deux demi-droites d'isoamortissement dans le plan opérationnel, l'ordre d'intégration non entier complexe décrit un lieu du plan complexe. Ce lieu caractérise une famille de gabarits généralisés dont l'enveloppe est un contour d'isoamortissement (figure (2.6)).
- 44 -
Figure 2.6 : Construction exacte d’un contour d’isoamortissement
2.3 - Contours de performance
2.3.1 - Enveloppe de gabarits généralisés comme contour de performance
L'approche géométrique la plus immédiate pour valider ou construire un contour de performance consiste à utiliser la technique des enveloppes. Le contour est alors défini comme l'enveloppe que forme une famille de segments de droite qui la tangentent figure (2.7)
arg (j)° |(j)|dB
dB -18
Figure 2.7 : Enveloppe définissant un contour de performance (en l’occurrence un contour
- 45 -
Dans le cadre d'une représentation dans le plan de Nichols, chaque segment de droite de la famille ainsi définie peut être interprété comme la partie rectiligne d'un lieu de Nichols en boucle ouverte qui assure en boucle fermée le dépassement ou l'amortissement correspondant au contour. D'ailleurs, une telle partie rectiligne autour de la fréquence au gain unité en boucle ouverte, u, n'est autre que le gabarit généralisé qui caractérise la commande CRONE de troisième génération.
Sachant que le comportement dynamique en boucle fermée est exclusivement lié au comportement en boucle ouverte au voisinage de la fréquence au gain unité u, il suffit de déterminer une transmittance opérationnelle susceptible de décrire le gabarit généralisé pour établir la transmittance en asservissement significative à la fois du dépassement et de l'amortissement (à travers l'équation caractéristique). Comme le montrent les développements suivants, la transmittance de description du gabarit généralisé obtenue est fondée sur l'intégration non entière complexe.
2.3.2 - Gabarit généralisé et intégration non entière complexe
Le gabarit vertical utilisé en commande CRONE de deuxième génération est caractérisé par un ordre d’intégration non entier réel, n, qui détermine son placement en phase à –n90° figure (2.8) [Lan93]. -18 arg (j)° |(j)|dB dB -90 A B u -n90
Figure 2.8 : Représentation du gabarit vertical par un segment de droite vertical dans le plan
de Nichols
Le gabarit vertical est en effet décrit par la transmittance d’un intégrateur non entier réel, soit :
- 46 -
pour
,
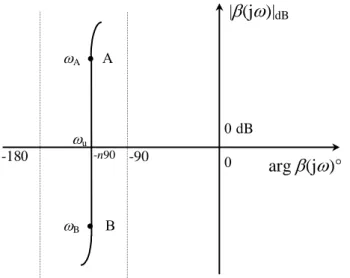
, . n R p p B n A u (2.13)Dans le cadre d’une conjecture, on est en droit de supposer, par extension de la description du gabarit vertical, que le gabarit généralisé est caractérisable par un ordre d’intégration non entier complexe, n, dont la partie réelle détermine son placement en phase à la fréquence u, soit -Re(n)90°, et dont la partie imaginaire détermine ensuite son inclinaison par rapport à la verticale (figure (2.9)).
-18 arg (j)° |(j)|dB dB -90 A B u -90R e(n) f(I m(n))
Figure 2.9 : Représentation du gabarit généralisé par un segment de droite de direction
quelconque dans le plan de Nichols
Le gabarit généralisé utilisé en commande CRONE de troisième génération est alors a priori décrit par la restriction dans le plan opérationnel j de la transmittance d’un intégrateur non entier complexe, soit:
n C. p p B i C n j u pour A, , (2.14)L’imaginaire pur unitaire i qui figure dans l’ordre d’intégration n (n=a+ib, a>0) est indépendant de l’imaginaire pur unitaire j qui figure dans la variable opérationnelle p (p=+j).
Comme la transmittance d’un intégrateur non entier complexe se décompose conformément à la relation p b p b p p a n u u u u ln sin i ln cos , a>0, (2.15)
- 47 -
sa restriction dans Cj s’exprime par :
p b p p a C n j u u u ln cos . (2.16)
Le comportement fréquentiel de (p) au voisinage de la fréquence u est caractérisé par l’ensemble des relations:
2 cosh ju b , (2.17)
j 90 arg u a , (2.18)
j 20a log d d u dB (2.19)
2 tanh 10 ln 180 j arg log d d et u b b . (2.20)Ces relations expriment qu’à la fréquence u:
- le gain doit être réajusté conformément à la relation (2.17) afin d’assurer |(ju)|=1 ;
- le placement en phase du lieu de Nichols de (j) (relation (2.18)) est exclusivement lié à l’ordre réel d’intégration, a ;
- la pente de gain (relation (2.19)) n’est pas affectée par l’ordre imaginaire d’intégration, b ; - la pente de phase (relation (2.20)) est une fonction paire de b et est donc toujours négative.
Ainsi, a posteriori et afin que l’ordre imaginaire d’intégration b agisse, non seulement sur la valeur absolue de la pente du lieu de Nichols de (j) à la fréquence u, mais
également sur son signe, il convient de décrire le gabarit généralisé par la transmittance:
cos ln , 2 cosh ) ( -sign u u ) ( sign b p b p b p a b (2.21)que l’on peut écrire sous la forme:
. 2 cosh ) ( -sign j C i u u ) ( sign b b a b p p b p (2.22)Le paramètre n (n=a+ib) ne représente (en toute rigueur) l’ordre d’intégration complexe de la transmittance (p) (2.22) que lorsque le paramètre b est négatif. Néanmoins,
- 48 -
afin d’alléger les développements ultérieurs, nous conviendrons de conserver la dénomination ordre d’intégration lorsque le paramètre b est positif.
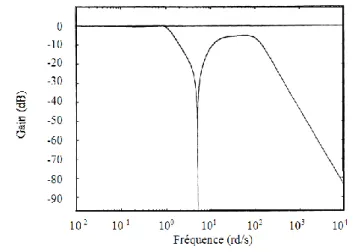
En dehors des valeurs de b inférieures à l’unité pour lesquelles se manifestent de très faibles ondulations de gain et de phase, la figure (2.10) révèle l’excellente linéarité des gabarits généralisés. Pour un ordre réel d’intégration donné, soit a = 1.5, cette figure représente les gabarits généralisés correspondant à différentes valeurs de l’ordre imaginaire d’intégration, b, en l’occurrence : -2 ; -1.5 ; -1 ; -0.5 ; 0 ; 0.5 ; 1 ; 1.5 ; 2.
Ainsi, la transmittance (2.22) s’avère une excellente transmittance opérationnelle de description du gabarit généralisé.
Figure 2.10 : Gabarits généralisés pour un ordre réel d’intégration donné, en l’occurrence
a=1.5, et différents ordres imaginaires d’intégration
2.4 - Construction des contours d’isoamortissement
L’objet de ce paragraphe est de déterminer une famille de transmittances de description du type (2.22) qui présentent notamment la même fréquence au gain unité u et qui assurent le même facteur d’amortissement en boucle fermée, puis d’utiliser la linéarité des lieux de Nichols correspondants pour la construction d’un contour d’isoamortissement par la technique des enveloppes.
La paire de pôles complexes conjugués dont résulte le mode oscillatoire en boucle fermée satisfait à l’équation caractéristique :
0- 49 -
ou, dans le cadre d'une normalisation des pôles par rapport à la fréquence u, soit p'=p/u :
' 01 p , (2.24)
ou encore, compte tenu de l'expression de (p) (relation (2.21)) :
cos ln '
0 ' 2 cosh 1 -sign() ) ( sign b p b p b a b . (2.25)Pour la variable opérationnelle p' exprimée en coordonnées polaires, soit p'=ej, l'équation caractéristique normalisée devient :
0 ) , , F(a,b , (2.26) avec
b b b a,b ba ba cos ln j 2 cosh e ) , , F( sign( ) -jsign( ) . (2.27)La fréquence u étant fixée, la paire de pôles, solution de cette équation, dépend uniquement de l'ordre n d'intégration de la transmittance (p) (relation(2.22)).
Lorsque la paire de pôles décrit les deux demi-droites d'isoamortissement représentées figure (2.11) dans Cj, l'ordre n d'intégration associé au gabarit généralisé décrit dans Ci le lieu
des ordres d'intégration assurant le même facteur d'amortissement (défini par le cosinus du
demi-angle au centre que forme la paire de pôles), soit :
Ci, i ; R , arccos , F , , , 0
n n a b o a b . (2.28) 0 demi-droites d’isoamortissement = - coso Im[p] Re[p] +o -o p+=ejo p-=ej-o- 50 -
Compte tenu de la propriété que définit l'égalité ), , , F( ) , , F(a,b a,b 1 (2.29)
le lieu présente une symétrie par rapport à l'axe réel du plan complexe i. Cette propriété permet de limiter l'étude aux ordres imaginaires d'intégration b négatifs.
Une telle réduction du domaine d'étude permet de ramener la détermination des éléments de à la résolution d'un système de deux équations non linéaires à variables
séparables issues de la décomposition en parties réelle et imaginaire de F(a,b,,), soit :
g f g f 2 2 1 1 b a b a , (2.30)où les fonctions f1, f2, g1 et g2 sont respectivement définies par :
o 2 1 cos f a a , (2.31)
o 2 2 sin f a a , (2.32)
2 cosh ln cos cosh g o 1 b b b b (2.33) et
2 cosh ln sin sinh g o 2 b b b b . (2.34)La solution d'un tel système s'obtient par la minimisation (à l'aide de la méthode du gradient conjugué) d'un critère quadratique, soit :
f g
f
g
.J 1 a 1 b 2 2 a 2 b 2 (2.35)
Il est à noter que le lieu admet comme élément l'ordre réel d'intégration
0
o n n Im , (2.36)- 51 -
La figure (2.12) représente le lieu correspondant à la valeur = 0,1.
Partie réelle
Figure 2.12 : Lieu des ordres d’intégration assurant le même facteur d’amortissement, en
l’occurrence =0,1
Compte tenu de l'excellente linéarité du lieu de Nichols de (p) (relation(2.22)) autour de la fréquence u, une approximation légitime consiste à le confondre, autour de cette
fréquence, à sa tangente au point fréquentiel u, n, d'équation
, B A Y : n n n (2.37) avec 2 tanh ln(10) 9 ) sign( A b b a b n (2.38) et 2 tanh ln(10) 10 ) sign( B 2 b b a b n . (2.39)
En notant In1n2 le point d'intersection de deux gabarits généralisés, restrictions de deux droites 1 n et 2 n
, le contour d'isoamortissement C se définit comme le lieu des points In1n2
tels que les ordres n1 et n2 soient deux éléments du lieu différents mais infiniment proches, soit :
2 1 2 1 2 1 2 1 0 , 2 1, , limI / C n n n n n n n n M n n P M . (2.40) P a rt ie i m a g in a ire- 52 -
En d'autres termes, le contour d'isoamortissement est défini comme l'enveloppe de la famille de droites n correspondant à des ordres n appartenant à un même lieu .
La figure (2.13) illustre la construction du contour d'isoamortissement correspondant à un facteur d'amortissement de 0,1.
Figure 2.13 : Construction du contour d’isoamortissement correspondant au facteur
d’amortissement =0,1
Le contour ainsi tracé montre qu'un contour d'isoamortissement ne fait l'objet que d'une représentation partielle. Celle-ci résulte des limitations de la méthode de construction. La validité d'une telle méthode exige en effet que dans le cadre de son application certains grands principes de l'automatique soient respectés.
1 - D'une manière générale, afin que la dynamique en boucle fermée (que détermine le comportement en boucle ouverte au voisinage de la fréquence au gain unité u) soit
représentative du transitoire de la réponse indicielle en asservissement ou en régulation, il faut notamment que le gain en boucle ouverte augmente suffisamment rapidement lorsque la fréquence diminue en deçà de u.
2 - Dans le cas d'une réponse indicielle en asservissement ou en régulation comportant un mode oscillatoire, afin que la fréquence propre et le facteur d'amortissement d'un tel mode chiffrent bien la rapidité et l'amortissement de la dynamique, il faut que ce mode soit suffisamment dominant. La vérification d'une dominance assure alors celle de la première condition.
Dans le cas d'une intégration généralisée en boucle ouverte où la pente de gain est de -20adB/dec autour de la fréquence u, a désignant l'ordre réel d'intégration, il faut donc que a