Conformational changes influence clogging behavior of micrometer-sized microgels in idealized multiple constrictions
Texte intégral
Figure

Documents relatifs
The effectiveness of the backup service requests for the transfer of pack- ages through aggregated channels, when presenting the analyzed system as a multi-channel QMS with a
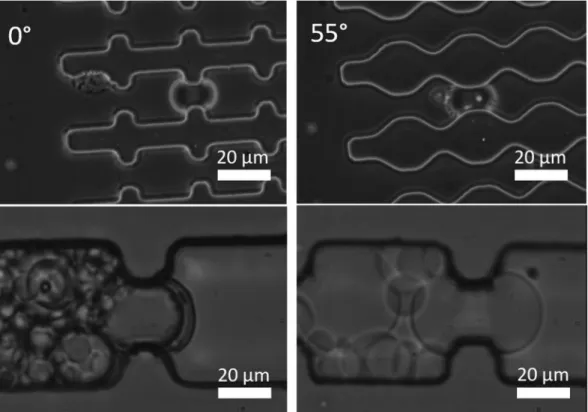
From the beginning of the deposition process, particles is captured on the pore wall over a length 10 times larger than W (Figure 106-C images a-c).. In this first step, all
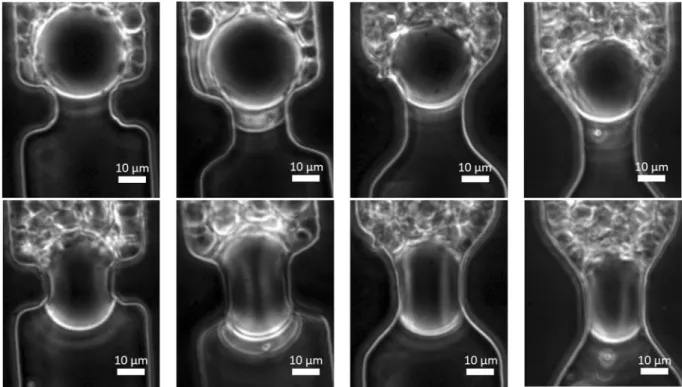
We used microfluidic channels with multiple constrictions as model membranes to observe microgel behavior, and found that microgels mostly clog the channels at the first
successively provide an expression for the rate region of mul- tiple access channels (MAC) and their dual broadcast chan- nels (BC), when either the transmitter performs uniform
We have shown, that in a decentralized vector MAC where each transmitter aims to maximize its own data rate by using water-filling based power allocation, the network sum-rate can
In this section we assume that the user are free to share their transmit power between their antennas but for each realization of the coordination signal the transmit power
The last scenario we propose to analyze in this paper is the case of equations (17) and (18), where the nodes have a peak power constraint that is a priori fixed for the
Theses studies point out the position control problem since the group of magnetic microrobots are exposed to the same control input: the magnetic gradient field.. In [6], the
