HAL Id: dumas-01843062
https://dumas.ccsd.cnrs.fr/dumas-01843062
Submitted on 18 Jul 2018
HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Copyright
Auscultation dynamique in situ de structures en pisé :
traitement FDD des données expérimentales
Mohamed Amine Mekoui
To cite this version:
Mohamed Amine Mekoui. Auscultation dynamique in situ de structures en pisé : traitement FDD des données expérimentales. Sciences de l’ingénieur [physics]. 2015. �dumas-01843062�
A
USCULTATION DYNAMIQUE IN SITU DE
STRUCTURES EN PISE
Traitement FDD des données expérimentales
Président du jury : M. Antonin Fabbri Maître de TFE : M. Stéphane Hans
Expert : M. Quoc Bao BUI
Juin 2015
Mohamed Amine MEKOUI
VA Génie Civil Promotion 60
N
OTICE ANALYTIQUE
NOM PRENOM
AUTEUR MEKOUI Mohamed Amine
TITRE DU TFE Mesures in situ et mise au point d’un programme de traitement de données permettant de déterminer les caractéristiques dynamiques
d’une structure en pisé
ORGANISME D'AFFILIATION ET
LOCALISATION NOM PRENOM MAITRE DE TFE LGCB, ENTPE à Vaulx-en-Velin HANS Stéphane
COLLATION Nbre de pages du rapport 58 Nbre d'annexes (Nbre de pages) 12 Nbre de réf. biblio. 10
MOTS CLES Dynamique, génie parasismique, FDD, pisé
TERMES
GEOGRAPHIQUES
ENTPE, Chasselay, Dagneux
RESUME Ce travail s'inscrit dans le cadre de l’étude du comportement dynamique de structures afin de mieux définir les campagnes expérimentales à venir destinées à évaluer le comportement des bâtiments in-situ. Il s’agit de développer un outil numérique spécifique permettant d'identifier les modes propres de vibration. En traitant les signaux enregistrés par différents capteurs, l'objectif est d’évaluer les caractéristiques vibratoires d’une structure par une méthode d’analyse modale appelée Frequency Domain Decomposition.
L'outil est d'abord validé grâce à une maquette, puis on l'utilise pour des structures en pisé, d'abord simple puis plus complexe.
ABSTRACT This work deals with some aspect of dynamical issues. Indeed, the purpose is to develop a specific numerical tool to evaluate the behaviour of buildings by treating the signals recorded of its vibrations in situ. It is necessary to develop this type of tools to better identify the real modal characteristics of structures. The program is based on a new method called Frequency Domain Decomposition. The program will be validated thanks to a model and then, it is used to perform studies on rammed earth structures.
REMERCIEMENTS
Ce travail de fin d’étude a été réalisé au laboratoire des géomatériaux à l’ENTPE. Je voudrais remercier toutes les personnes qui ont participé de près ou de loin à la réalisation de ce travail.
Je tiens tout particulièrement à remercier M. Stéphane Hans pour avoir accepté d’être mon maître de TFE et m’avoir proposé ce projet. Je le remercie pour sa disponibilité, ses conseils et pour m’avoir encadré au cours de ce stage.
Je tiens à remercier M. Quoc Bao BUI pour avoir accepté d’être l’expert de mon jury. Je voudrais également remercier M. Antonin Fabbri pour avoir présidé le jury de mon TFE.
Un grand merci à M. Nicolas Meunier d’avoir consacré un peu de son temps à la réalisation des mesures expérimentales, ainsi que pour sa bonne humeur et sa passion communicative pour le pisé.
Je tiens à témoigner tout particulièrement ma sympathie et ma reconnaissance à Mme Cécile Jacquet pour son accueil chaleureux et sa disponibilité dans sa belle maison de Chasselay.
Enfin, je termine par un grand remerciement à mon épouse pour son soutien inconditionnel durant ces trois mois de TFE… et quatre années d’école.
Sommaire
1
I
NTRODUCTION GENERALE9
1.1 Contexte de ce travail 9
1.2 Problématique 9
1.3 La démarche adoptée 9
2
L’
AUSCULTATION DYNAMIQUE DES STRUCTURES11
2.1 Généralités 11
2.1.1 Traitement des mesures 11
2.1.2 Méthode du bruit mécanique ambiant 11
2.2 Le système d’acquisition du bruit ambiant 11
2.3 Le traitement FDD 14
2.3.1 Généralités 14
2.3.2 Principes de la méthode FDD 14
3
M
ISE AU POINT D’
UN PROGRAMME DE TRAITEMENT DE DONNEES16
3.1 Généralités 16
3.2 Le cahier des charges 17
3.3 Le logigramme 17 3.4 L’interface utilisateur 18 3.5 Validation du programme 19 3.5.1 Principe 19 3.5.2 Démarche adoptée 20 3.5.3 Résultats obtenus 21
4
A
PPLICATION A L’
AUSCULTATION D’
UNE STRUCTURE EN PISE26
4.1 La construction en pisé 26
4.1.1 Généralités 26
4.1.2 Réglementation parasismique et construction en pisé 26
4.2 Etude d’un mur en pisé 27
4.2.1 Présentation 27
4.2.2 Démarche adoptée 28
4.2.3 Résultats obtenus 28
4.3 Etude d’une maison en bois/pisé 34
4.3.2 Les conditions expérimentales 35 4.3.3 Résultats obtenus 36
5
C
ONCLUSION GENERALE44
5.1 Le travail effectué 44 5.2 Perspectives 446
B
IBLIOGRAPHIE46
7
A
NNEXES47
7.1 Annexe A : routine de calcul pour la poutre de Timoshenko : 47
7.2 Annexe B : Programme Matlab 47
7.2.1 Programme principal 47
7.2.2 Moteur de calcul FDD 51
L
ISTE DES ILLUSTRATIONS
Figure 1 : le capteur dynamique TROMINO® ... 12
Figure 2 : principe de l'échantillonnage d'un signal temporel ... 13
Figure 3 : principe du traitement des données expérimentales ... 15
Figure 4 : logigramme du programme ... 18
Figure 5: allure de l'interface graphique ... 19
Figure 6 : spectre des valeurs singulières de la maquette ... 21
Figure 7 : spectre obtenu après application de la FDD ... 22
Figure 8 : zoom sur le 4ème pic... 22
Figure 9 : tableau des composantes des vecteurs singuliers ... 23
Figure 10 : allure des déformées modales pour la maquette ... 23
Figure 11 : principe de la détermination de l'amortissement de la structure par la méthode de la demi-largeur de bande passante ... 24
Figure 12 : détermination de l'amortissement sur la maquette ... 24
Figure 13 : échantillon de pisé réalisé par Nicolas Meunier ... 26
Figure 14 : carte de l’aléa sismique et des zones de constructions en pisé et en baug - Source : [Mottier, 2007] ... 27
Figure 15 : géométrie du mur en pisé de Dagneux et position des capteurs ... 28
Figure 16: spectres obtenus pour les mesures du mur de pisé de Dagneux suivant les deux directions ... 29
Figure 17 : maillage fin du mur en pisé ... 30
Figure 18 : résultats de la modélisation du mur sous Comsol® ... 30
Figure 19 : zoom sur le spectre EW et hypothèse de modes rapprochés ... 31
Figure 20 : recherche des caractéristiques mécaniques optimales ... 32
Figure 21 : modèle de poutre utilisé ... 32
Figure 22 : photo de la maison Jacquet à Chasselay ... 34
Figure 23 : situation de la maison Jacquet et origine de la terre utilisée ... 35
Figure 24 : plan simplifié de la maison ... 36
Figure 25 : symbole utilisé pour un capteur avec son orientation ... 37
Figure 26 : Positions des capteurs pour la configuration 1 ... 37
Figure 27 : photographies des capteurs positionnés selon les différentes configurations .... 38
Figure 28 : spectres obtenus pour les différentes configurations ... 40
Figure 29 : spectres obtenus pour les différentes configurations – échelle linéaire ... 41
Figure 30 : zoom sur les quatre spectres - échelle linéaire ... 42
Figure 31 : comparaison des variations d'amplitudes des vitesses mesurées lors de la configuration 1 ... 43
1 I
NTRODUCTION GENERALE
1.1 Contexte de ce travail
A l’heure actuelle, il est impossible de prévoir un séisme, phénomène naturel aux conséquences potentiellement désastreuses pour une société. Malgré cette incertitude, la puissance publique doit intervenir dans la prise en compte de ce risque, notamment en matière de prévention et doit établir des règles de constructions dites parasismiques. Les règlements ont évolué depuis la fin des années 60 et, depuis Janvier 2013, la norme pour les projets de construction en zone sismique en vigueur dans l’ensemble de l’Union européenne est l’Eurocode 8.
Les règlements évoluent notamment en fonction de la recherche scientifique, et le laboratoire Géomatériaux de l’ENTPE a développé une expertise reconnue en matière d’étude dynamique des structures. Plus particulièrement, dans le cadre de projets visant à valoriser certains matériaux biosourcés (Projet PRIMATERRE), l’équipe souhaite notamment s’investir dans l’application des méthodes d’analyse au matériau pisé afin de mieux comprendre le comportement dynamique des structures de ce type.
1.2 Problématique
Un séisme est un phénomène dynamique qui induit des effets mécaniques spécifiques sur une structure. En effet, même si la réponse de celle-ci dépend de nombreux paramètres (géométrie, type de séisme, interaction sol-structures, etc.), il existe, sous certaines hypothèses, ce que l’on appelle des « modes propres » de vibrations qui permettent de décomposer les mouvements complexes en un ensemble de mouvements plus simples à étudier. L’enjeu est donc de pouvoir déterminer ces modes propres à travers diverses méthodes. Il apparaît clairement qu’une méthode non destructive et facilement mise en œuvre sera privilégiée par l’ingénieur.
Par ailleurs, si le secteur de la construction est largement dominé par le béton, il existe encore des filières traditionnelles (pisé, bois, pierre, etc.) qui développent des méthodes de construction traditionnelles, voire innovantes. Pour des raisons assurantielles, tout projet doit respecter les normes en vigueur, notamment sismiques. Cependant, ces dernières sont très bien connues et appliquées aux matériaux dominants alors que certaines souffrent particulièrement d’un manque de données spécifiques relatif au matériau utilisé. Il en va ainsi de la construction en pisé, très répandue dans la région Rhône Alpes et objet d’intenses études et partenariats destinés à la valoriser. Il semblerait en effet que ce matériau ancestral réponde aux enjeux du développement durable : aspects sanitaires et environnementaux, patrimoniaux et socio-économiques.
Des considérations précédentes, il apparaît intéressant d’étudier en quoi l’auscultation des bâtiments peut être un moyen de comprendre le comportement dynamique de ces structures ? Quelles sont les limites de ces mesures in situ et comment traiter les données afin d’extraire les paramètres pertinents pour le calcul sismique et donc, à terme, répondre aux exigences de la réglementation, en particulier pour les constructions en pisé, neuves ou anciennes ?
1.3 La démarche adoptée
L’objet de l’étude dynamique est donc de déterminer les modes propres d’une structure de façon théorique et/ou expérimentale. La première partie de mon travail a consisté à approfondir les bases du calcul sismique que j’avais entamées lors du cours de Génie
parasismique de 3ème année de M. Hans. Or, en pratique, la connaissance des premiers modes suffit pour comprendre le comportement de la structure, je me suis donc rapidement tourné vers la bibliographie relative aux méthodes d’auscultation que nous n’avons pas eu le temps d’étudier en cours. Puis, je me suis familiarisé avec l’utilisation d’appareils de mesures très précis dont il a fallu comprendre le fonctionnement. En effet, il ne suffit pas de mesurer un phénomène physique quelconque, il faut comprendre au maximum la façon dont il est mesuré et les limites intrinsèques apportés par l’appareillage et la chaîne de mesure.
Ensuite, il m’a fallu étudier quelques bases de traitement de signal, discipline non enseignée à l’école. Toutefois, les cours d’analyse de mathématique de 1ère année m’ont facilité l’assimilation des principaux résultats à connaître pour pouvoir exploiter les mesures. Ce traitement des données est la seconde phase la plus importante de mon travail. Les données brutes n’apportent en effet que très peu d’information par elles-mêmes. Il faut faire appel à des outils mathématiques sophistiqués pour extraire les informations recherchées. Nous avons choisi ici de développer une méthode de détermination récente appelée FDD (Frequency Domain Decomposition).
Après avoir assimilé la méthode, il m’a fallu l’implémenter et donc développer un moteur de calcul. Les cours de programmation de 1ère année m’ont permis de développer un programme sous Matlab®. Pour s’assurer de l’efficacité du programme, il a été nécessaire de valider le code en confrontant les résultats obtenus à une étude expérimentale sur une maquette au laboratoire.
Enfin, j’ai continué à exploiter le programme en étudiant un simple mur en pisé dont il a fallu extraire des paramètres dynamiques. La confrontation des résultats expérimentaux et théoriques ont été globalement satisfaisant et m’on permit de passer à la phase finale de mon travail dans laquelle j’ai eu l’occasion de visiter et d’ausculter une maison en structure mixte pisé/bois. Le traitement des données brutes et leur analyse constitue la conclusion de ce mémoire. Les résultats provisoires permettent d’éclairer les limites de notre travail et d’ouvrir des perspectives pour la suite des investigations.
2 L’
AUSCULTATION DYNAMIQUE DES STRUCTURES
2.1 Généralités
La littérature nous informe de l’existence d’une multitude de techniques destinées à ausculter les structures. Le choix de l’utilisation d’une technique dépend du type d’information que l’on souhaite obtenir et du prix que l’on est prêt à payer pour cela. Toutefois, le principe reste toujours le même : exploiter la réponse de la structure à une excitation plus ou moins contrôlée par l’opérateur afin d’extraire les informations caractéristiques qui régissent le fonctionnement de la structure.
2.1.1 Traitement des mesures
La réponse d’une structure à une excitation est un signal continu dans le temps qui contient de multiples informations à la fois sur l’environnement et la structure sollicitée
Naturellement, la mesure de cette réponse ne peut pas être continue, le capteur fait alors une acquisition numérique du signal. Il y a en effet un nécessaire échantillonnage qui doit être un compromis entre la capacité de stockage des mesures d’une part et le potentiel de perte d’information d’autre part.
Ensuite, le but du traitement de signal est d’extraire les informations à l’aide de modèles mathématiques (Transformées de Fourier, Laplace, ondelette, etc.) Dans cette étude, nous avons essentiellement privilégié la technique du bruit de fond mécanique traitée ensuite par la méthode FDD (Frequency Domain Decomposition).
2.1.2 Méthode du bruit mécanique ambiant
Dans les années 60, [Crawford et Ward, 1964] ont montré la possibilité de déduire les modes propres de vibration d’une structure à l’aide de cette méthode. Son principal avantage est qu’elle ne nécessite pas de système d’excitation extérieur ; la seule source d’excitation de la structure est le bruit ambiant de l’environnement : vent, vibrations crées par les activités humaines comme la circulation automobile, piétons, etc. génèrent des vibrations qui se propagent dans le sol ou l’air et sont capable d’exciter les bâtiments. Le niveau d’excitation est très faible et imperceptible par l’homme, mais des systèmes ultrasensibles permettent d’enregistrer ces vibrations.
Par ailleurs, le « bruit », en physique est une notion clairement définie, ici il s’agit de faire l’hypothèse d’un bruit blanc i.e. un bruit composé de toutes les fréquences, chaque fréquence ayant la même énergie (i.e. même densité spectrale de puissance). L’enjeu de la mesure est donc de se rapprocher le plus possible d’un bruit blanc, au moins dans une gamme de fréquences qui nous intéresse en génie civil (inférieure à 50Hz)
L’intérêt de la méthode que nous utilisons (bruit ambiant et analyse FDD) est de constituer une technique d’auscultation vibratoire non destructive assez simple d’utilisation.
2.2 Le système d’acquisition du bruit ambiant
2.2.1.1 Caractéristiques de l’appareil de mesure
Cette opération repose sur l’utilisation d’un instrument portable et précis de la marque TROMINO®. Initialement destiné à mesurer les vibrations sismiques du sol, l’appareil permet de réaliser une analyse modale des structures.
Dans un premier temps, il m’a fallu prendre en main l’appareil et comprendre le fonctionnement des logiciels. Différentes mesures m’ont permis d’évaluer la présence ou
non de biais, et l’existence d’éventuelles dérives sur de longues durées et pour différentes fréquences d’échantillonnage.
Figure 1 : Le capteur dynamique TROMINO®
L’appareil est léger (1.1 kg), de dimensions réduites (10 x 14 x 8 cm) et fonctionne sur batterie, il est donc portatif et permet d’ausculter des structures in situ.
Il possède une double série de trois capteurs mesurant la vitesse (précision de 10-6 mm/s) et l’accélération selon les trois directions spatiales. Les mouvements de la structure sont tout d’abord amplifiés puis convertis sous forme numérique et stockés dans la mémoire interne de l’appareil dans différentes partitions. Les données peuvent alors être transférées sur PC et analysées soit à l’aide du logiciel Grilla® fourni soit directement par l’utilisateur.
Le laboratoire dispose de quatre capteurs qui, après synchronisation temporelle par GPS ou radio, peuvent être placés selon différentes configurations au sein de la structure. Même si un seul capteur est suffisant pour identifier les fréquences propres de la structure, l’utilisation de plusieurs appareils permet de préciser la nature des modes mesurés et les déformées correspondantes. Ainsi, on place les appareils selon plusieurs configurations identifiées au préalable afin d’optimiser la campagne de mesure.
2.2.1.2 La fréquence d’échantillonnage
L’échantillonnage permet la transformation d’un signal continu x(t) en un signal discret
Figure 2 : principe de l'échantillonnage d'un signal temporel
La fréquence d’échantillonnage d’enregistrement, fe = 1/Te, impacte directement la précision des mesures ; plus la fréquence est élevée, plus les mesures seront conséquentes et donc les fichiers de données lourds. Nous pouvons choisir des fréquences dans la gamme : 128, 256, 512, 1024 Hz.
Afin de déterminer fe, considérons la fréquence fmax classique pour un bâtiment qui est inférieure à 50 Hz et dépend de la hauteur de la structure. Il faut toutefois un nombre de points minimum pour interpoler correctement les données : on recommande en traitement de signal de prendre une fréquence d’échantillonnage adaptée selon la relation f = 2.56.fmax. On prendra donc fe = 128 Hz pour l’analyse modale d’un bâtiment.
Enfin, concernant la durée d’acquisition, il faut préciser d’une part, que l’on assimile le bruit ambiant à une succession de « chocs » aléatoires à différentes fréquences ; il faut donc s’assurer d’une durée suffisante pour que la répartition de l’énergie se fasse sur une bande de fréquences dans la gamme qui nous intéresse. D’autre part, si la durée d’enregistrement est T, la précision fréquentielle associée sera de Δf = 1/T. Ainsi, un enregistrement d’une durée de 10 minutes assure une précision amplement suffisante de l’ordre du 1/100ème Hz. Le signal pourra alors être découpé en plusieurs tranches de 128 s (≈ 2 min), avec 50% de recouvrement, lors du traitement ultérieur.
2.2.1.3 Mode opératoire
La mise en place des capteurs nécessite quelques réglages préalables. Le plus important est la synchronisation, Cette opération est indispensable pour qu’on puisse traiter les signaux ultérieurement. Les modèles actuels permettent de synchroniser les appareils automatiquement par communication radio. J’ai utilisé cette fonction pour la validation de mon programme lors des mesures sur maquette, toutefois, nous avons constaté la nécessité d’antennes supplémentaires pour faire des mesures in situ. Ainsi, nous avons dû nous contenter d’une synchronisation GPS des appareils. Chacun dispose en effet d’une puce GPS permettant de régler son horloge interne par rapport à un ensemble de satellites, cette opération étant faite à l’extérieur. Une fois chaque capteur calé sur l’horloge universelle, on peut effectuer des mesures in situ. Les signaux enregistrés devront toutefois tous être ramenés à la même base grâce à un programme spécifique (Grilla®).
Une fois cette opération essentielle réalisée, chaque capteur est placé sur un support stable et horizontal au sein de la structure. On veillera particulièrement à bien orienter les directions de l’appareil, « NS » et « EW », qui ne correspondent pas nécessairement aux directions géographiques. Les différents capteurs de vitesses/accélérations enregistrent en effet selon trois directions orthogonales préalablement définies.
2.2.1.4 Récupération des mesures
Une fois les mesures effectuées et stockées dans la mémoire de l’appareil, on transfère les données par câble USB au PC grâce au logiciel qui accompagne l’instrument. Les données sont au format binaire et sont exploitables par le logiciel Grilla®. Ce dernier présente un intérêt pour d’autres types d’analyse, sismique notamment, mais est très limité pour l’analyse modale. Il est en effet difficile de repérer précisément les modes de vibrations d’autant que l’exploitation des courbes est très limitée (impossible de changer le type de graphique, ni de cliquer sur la courbe pour obtenir une valeur précise, etc.)
Heureusement, il est possible d’exporter les données sous formes ASCII et de les exploiter par un autre programme existant ou à faire. Nous avons décidé d’écrire un programme capable de traiter ces données à l’aide d’une routine spécifique (FDD), et de présenter le tout sous une interface simple d’utilisation.
2.3 Le traitement FDD
2.3.1 Généralités
On associé généralement le traitement du signal à la transformation de Fourier. Cette méthode classique, largement employée, fournit des résultats corrects. Je l’ai étudié à l’école notamment à travers le TP de Dynamique de seconde année.
De nombreuses études ont toutefois souligné que cette méthode présentait des limites notamment dans l’analyse de structures à modes répétés ou très rapprochés et est sensible au bruit. Au début des années 2000, une nouvelle technique fit son apparition, la FDD (Frequency Domain Decomposition). La littérature [Brincker, Zhang & Andersen., 2000] relève que cette méthode présente plusieurs avantages :
insensibilité au bruit,
détermination, avec précision, des fréquences propres, même si elles sont très rapprochées,
détection des modes identiques.
2.3.2 Principes de la méthode FDD
Au préalable, définissons la densité spectrale de puissance PSD d’un signal.
Considérons donc un signal temporel x(t). L'auto-corrélation Rxx(t)du signal est la corrélation croisée du signal par lui-même et mesure les « dépendances internes » de ce signal, autrement dit elle permet de détecter des régularités comme un signal périodique perturbé par beaucoup de bruit, ou bien une fréquence fondamentale et ses harmoniques. Si l’on considère deux réalisations x1 = X(t1) et x2 = X(t2) du même processus, on a :
Introduisons alors la densité spectrale de puissance PSD de ce signal. Il s’agit de la transformée de Fourrier de la fonction d’auto-corrélation précédente. Elle sert à décrire la façon dont l’énergie d’un signal est distribuée suivant les différentes fréquences et est souvent appelée « spectre du signal » ; elle est définie par :
Cette fonction est réelle positive et paire si le signal d’entrée est réel.
Ensuite, modélisons notre structure comme un système qui transforme un signal d’entrée x(t) comportant r composantes (l’excitation) en un ensemble de réponse y(t), comportant m composantes :
Supposons que la réponse de la structure à l’excitation soit linéaire et ne dépende pas de l’instant d’application (invariant dans le temps).
L’utilisation de la transformée de Fourier permet de simplifier la relation entre les deux signaux :
𝑌(𝜔) = 𝐻(𝜔)𝑋(𝜔)
Si le processus d’entrée est stationnaire (ses propriétés statistiques, caractérisées par des espérances mathématiques, sont indépendantes du temps), [Brincker, Zhang & Andersen, 2000] ont montré alors que l’on peut écrire :
Avec :
Gxx (matrice carrée de taille r), la PSD du signal d’entrée x, Gyy (matrice carrée de taille m), la PSD du signal de sortie y, H(ω) la matrice de la réponse en fréquence.
Les opérateurs * et T désignent respectivement le conjugué complexe et la transposée. Dans le cas particulier d’un bruit blanc (qui possède la même densité spectrale de puissance à toutes les fréquences), Gxx (ω) est constant. Ainsi, nous n’avons pas besoin de connaître le signal d’entrée pour calculer Gyy (ω). On décompose cette matrice en valeurs singulières sous la forme :
Avec :
U (matrice unitaire de taille m) composée des composantes des vecteurs singuliers, Σ (matrice diagonale de taille m x n), composée des valeurs singulières si,
L’opérateur H désigne la transposition conjuguée.
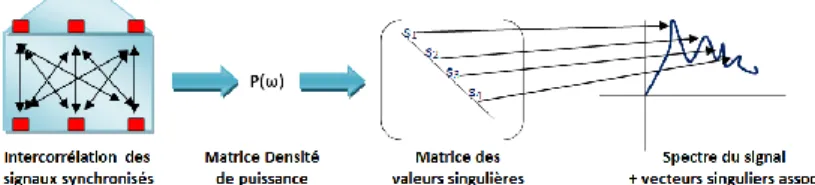
Ainsi pour chaque fréquence, on décompose en valeurs singulières, la matrice des densités spectrales de puissances croisée de tous les signaux synchronisés.
Si maintenant on trace la courbe des valeurs singulières en fonction des fréquences, chaque pic correspondra à un mode, la 1ère valeur singulière en général, et le vecteur singulier correspondant sera une bonne estimation de la déformée.
Le schéma ci-dessous résume les différentes étapes du traitement des données expérimentales :
3 M
ISE AU POINT D
’
UN PROGRAMME DE TRAITEMENT
DE DONNEES
3.1 Généralités
Le cours de tronc commun de 1ère année de l’ENTPE intitulé « Informatique conceptuelle et langage de programmation » nous a donné les bases de la conception informatique et nous a familiarisés avec un langage de programmation : Matlab.
Matlab permet d’obtenir des solutions numériques aux différents problèmes de l’ingénieur. Il tire sa force de sa simplicité, de son ergonomie, et du grand nombre de fonctions déjà programmées permettant de résoudre des problèmes courants (développer des interfaces conviviales par exemple). Ses défauts résident principalement dans sa relative lenteur d’exécution1 (Matlab est un langage interprété i.e. chaque instruction d’un programme est transformée à la volée en un ensemble d’instructions pouvant être exécutées par le processeur, ce qui induit une vitesse globale d’exécution moindre que dans le cas de langages compilés comme le langage C, où cette étape est réalisée une fois pour toute pour l’ensemble du programme, avant son exécution). De plus, comme nous l’avons déjà signalé, son prix reste élevé pour des licences professionnelles.
Quoiqu’il en soit, la méthodologie de la conception d’un programme est fondée sur une décomposition d’un problème complexe en un ensemble de problèmes plus simples, interdépendants les uns des autres. Cette conception est d’ailleurs très largement indépendante de son implantation avec tel ou tel langage. Enfin, elle repose sur les règles de bonne pratique suivantes :
Compréhension correcte du problème à implanter.
Description (presque exhaustive) de tout ce qui va se passer en posant sur le papier la compréhension du problème
o Utiliser le scenario le plus représentatif possible. o Identifier les phases sensibles, critiques.
Identifier et lister les opérations à effectuer : les nommer, les décrire et en faire des fonctions.
Identifier et lister les informations à manipuler : en entrée, celles modifiées pendant, celles résultats/sortie
Ordonner/classer les opérations sur un plan complexité/profondeur o Se limiter à des opérations peu complexes :
une vingtaine de lignes de codes, 2 ou 3 sous-opérations.
o Si des opérations sont trop complexes, regrouper des sous-taches
Trouver une façon d'organiser (information en variables) : plus on avance en profondeur, plus on doit savoir comment les informations sont stockées dans le programme. Pour cela, il faut veiller à :
o la lisibilité du code.
o la simplicité du codage des informations en des variables.
1 Aujourd’hui, avec la puissance des machines, la rapidité d'un programme est largement suffisante pour des
Expliquer le code à l'aide de commentaires pour une future maintenance. (correction/évolution), notamment :
o écrire en tête de fonctions.
o expliciter les variables (information, codage).
o devant chaque ligne (groupe de ligne) constituant une opération.
3.2 Le cahier des charges
Mon tuteur m’a donné toute liberté pour concevoir un programme capable de répondre au problème pose. J’ai donc commencé par rédiger un cahier des charges afin de bien définir les spécifications auxquelles devra répondre le programme de calcul :
Implémenter la méthode FDD : il faut donc bien utiliser le modèle analytique et
respecter les notations utilisées par celui-ci afin de faciliter la lecture du code.
Il doit être opérationnel le plus longtemps possible : pour cela il faut permettre
d’éventuelles modifications afin de prendre en compte de futures amélioration sur le fond ou la forme, d’où l’importance des commentaires au sein du code.
Une interface simple permettra son utilisation : elle sera munie de boutons de
commande et un simple « clic » doit permettre de calculer les principaux paramètres de calcul.
Des fonctions « avancées » ont été mises au point au cours du développement afin d’améliorer l’utilisation du programme :
Affichage des différentes courbes et possibilité de les effacer
Possibilité de sauvegarder les résultats pour une utilisation ultérieure.
3.3 Le logigramme
Une fois les mesures récupérées, on le traite avec le moteur du programme qui constitue une sorte de boîte noire : on fournit des données entrées (mesures, fréquences d’échantillonnage), on récupère les données de sortie (matrices PSD pour un ensemble de fréquences discrétisées, valeurs singulières et vecteurs singuliers). Ce mode de fonctionnement facilitera la création de l’interface graphique.
L’algorithme du noyau de calcul est représenté par le diagramme ci-dessous (cf. Annexe A pour le code source) :
Figure 4 : logigramme du programme
3.4 L’interface utilisateur
Malgré le fait que les interfaces graphiques semblent secondaires par rapport au programme principal, elles doivent néanmoins être conçues et développées avec soin. Ici, la seule exigence que doit respecter l’interface est de fournir les principales données de sortie et d’être simple d’utilisation dans la saisie des paramètres d’entrée ; l’efficacité et l’ergonomie étant essentielles pour l'utilisateur final.
J’ai donc tout d’abord dessiné sur papier l’allure générale d’une telle interface ; elle présentera d’un côté les paramètres à saisir et de l’autre côté les résultats à afficher. Ces derniers seront présentés sous formes numérique et graphique pour faciliter la lecture et l’exploitation des données. Les opérations de calcul et de chargement de fichiers de données seront obtenues par simple clic de boutons destinés à cet effet.
Depuis la version 5.0 de MATLAB, l’ingénieur dispose d’un outil de développement des Interfaces Graphiques (ou interfaces homme-machine) appelé GUIDE. Elles permettent à l'utilisateur d'interagir avec un programme informatique, grâce à différents objets graphiques (boutons, menus, cases à cocher…). Ces objets sont généralement actionnés à l'aide de la souris ou du clavier.
La figure ci-dessous présente l’allure de l’interface graphique développée :
Figure 5: allure de l'interface graphique
Après avoir entré la fréquence d’échantillonnage, le fichier de mesures, préparé en amont sur un tableur Excel par exemple ou en fichier texte, est chargé à l’aide d’un bouton (Etape 2), le calcul et l’affichage du spectre sont alors automatiquement réalisés.
On peut alors sélectionner des pics sur le spectre et la fréquence correspondante s’affiche à l’aide d’un point vert. Il est possible de récupérer le vecteur singulier en lançant l’étape 4.
Enfin, il suffit d’effacer le spectre pour relancer un traitement (RESET)
3.5 Validation du programme
3.5.1 Principe
Avant d’utiliser le programme, il est impératif de bien le tester afin de s’assurer qu’il fonctionne correctement. Un temps non négligeable a été consacré à corriger les nombreuses erreurs pouvant se glisser dans le code et fausser les résultats. En informatique, un test de vérification a pour objectif principal d'identifier un nombre maximum de bugs et à vérifier que le programme réagit de la façon prévue. Certaines erreurs sont grossières : plantage du programme en raison d’une division par zéro par
exemple. D’autres sont plus cachées, tout semble fonctionner correctement mais la courbe obtenue est complètement fausse.
Ainsi, un test informatique ressemble à une expérience scientifique ; il faut vérifier la théorie par rapport aux faits validés précédemment. Ici, je me suis principalement servi des résultats expérimentaux obtenus sur une maquette du laboratoire.
3.5.2 Démarche adoptée
Le Laboratoire dispose d’une maquette représentant une structure à quatre niveaux que nous avons déjà étudiés en cours de 3ème année et en TP de dynamique. Cette structure est constituée de poteaux porteurs métalliques de hauteur égale à 30 cm et de section ronde filetée de diamètre apparent de 3 mm. Les planchers sont en bois de forme carrée de côté de 21 cm. Notons par ailleurs que la maquette est contreventée dans la direction Est-Ouest.
Sur la photo ci-dessous, on observe le dispositif expérimental utilisé. Les capteurs sont placés sur les planchers et sont tous orientés de la même manière.
La synchronisation est réalisée par radiocommunication entre les différents capteurs. Un appareil est alors connecté par câble USB à l’ordinateur est fait office de « maître ». C’est en déclenchant les mesures sur ce capteur à l’aide du logiciel Tromino Manager® que l’ensemble des capteurs débutent leur acquisition.
Après avoir attendu que le système se stabilise, j’ai lancé une acquisition d’une durée d’environ 8 minutes, avec une fréquence d’échantillonnage de 128 Hz.
Les mesures, stockées dans chaque appareil, ont été successivement récupérées par connexion USB à l’ordinateur. Les fichiers obtenus étant binaires, ne sont exploitables directement que par le logiciel fourni (GRILLA®). J’ai donc exporté toutes les mesures au format ASCII afin de les exploiter dans mon programme. Après traitement manuel des données à l’aide de Matlab® et d’Excel®, j’ai obtenu un fichier de mesures brutes exploitable.
Enfin, le programme applique la FDD sur tous les enregistrements, toutes directions confondues.
3.5.3 Résultats obtenus
3.5.3.1 Modes propres
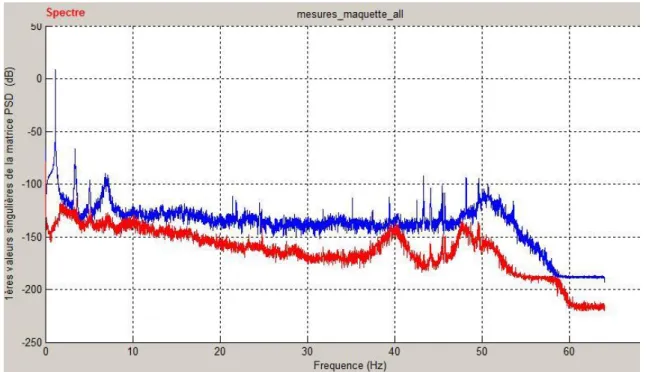
La figure ci-dessous présente les spectres des 1ères (bleues) et 2ndes valeurs singulières (rouges). On observe très clairement les pics des valeurs singulières sur la 1ère courbe, moins sur la seconde. Toutefois, cette dernière présente globalement des valeurs beaucoup plus faibles que la 1ère, ce qui nous a amené à les négliger pour la suite des traitements. L’option reste toutefois disponible dans le code du programme.
Figure 6 : spectre des valeurs singulières de la maquette
Si l’on se concentre sur la courbe bleue des 1ères valeurs singulières, on observe les pics suivants :
Figure 7 : spectre obtenu après application de la FDD
Le spectre obtenu suggère la présence de 4 modes principaux dont les trois premières fréquences sont 1.16 Hz, 3.39 Hz, 5.10 Hz. Notons que le 4ème mode présente une allure particulière et semble « dédoublé » comme l’illustre la figure ci-dessous. (6.87 Hz et 7.14 Hz)
Figure 8 : zoom sur le 4ème pic
3.5.3.2 Déformées
En cliquant sur un pic, on peut alors demander au programme de calculer le vecteur singulier correspondant. Celui-ci s’affiche alors à droite de la courbe. Notons que, d’une
part, un vecteur singulier comporte 12 composantes représentant l’allure de la déformée suivant les différentes directions EO, NS et Z.
D’autre part, on remarque que ce vecteur est complexe. Nous exploiterons uniquement la partie réelle qui représente l’allure de la déformée.
On reporte ci-dessous l’ensemble des parties réelles des vecteurs singuliers :
Figure 9 : tableau des composantes des vecteurs singuliers
On représente ci-dessous l’allure des déformées des pics détectés dans les deux directions horizontales :
Figure 10 : allure des déformées modales pour la maquette
3.5.3.3 Détermination de l’amortissement
En génie parasismique, il est important de connaître le facteur d’amortissement de la structure. On peut le calculer à l’aide de la formule [Clough&Penzien, 1995] dont le principe est illustré par la figure ci-dessous :
𝜉 =𝑓2− 𝑓1 𝑓1+ 𝑓2
Avec f1 et f2 les fréquences correspondant à la fréquence de pic f0 divisée par la racine
carrée de 2. Sur notre graphique, cette division correspond en réalité à une translation de - 3 dB parallèlement à l’axe des abscisses :
EW -0.0056915 EW -0.0066949 EW -0.014669 EW -0.013412 EW -0.0023665 NS 0.0018524 NS -0.0019172 NS -0.013083 NS 0.053632 NS 0.034261 Z 0 Z 0.0010667 Z -0.015123 Z 0.014487 Z 0.04332 EW -0.38435 EW -0.53997 EW -0.15378 EW -0.091359 EW -0.10575 NS 0.0077643 NS -0.0012131 NS -0.041231 NS 0.24208 NS 0.26447 Z -0.0070339 Z -0.01127 Z -0.20533 Z 0.015157 Z 0.045491 EW -0.59871 EW -0.1686 EW 0.44637 EW 0.043908 EW 0.082278 NS -0.0024988 NS -0.036293 NS -0.093181 NS 0.52057 NS 0.47136 Z -0.0022555 Z -0.012064 Z -0.026929 Z 0.016345 Z 0.042569 EW -0.69432 EW 0.41493 EW -0.18825 EW 0.10718 EW -0.06166 NS 0.014308 NS -0.050694 NS -0.12494 NS 0.6376 NS 0.74394 Z 0.002186 Z -0.011308 Z -0.026374 Z 0.021973 Z 0.050929 f = 7.14 Hz 1 2 3 4 f = 5.10 Hz 1 2 3 4 f = 6.86 Hz 1 2 3 4 f = 1.15 Hz 1 2 3 4 f = 3.39 Hz 1 2 3 4
Figure 11 : Principe de la détermination de l'amortissement de la structure par la méthode de la demi-largeur de bande passante
Figure 12 : détermination de l'amortissement sur la maquette
En zoomant sur le premier pic, on constate la difficulté de mesurer précisément l’amortissement de la maquette. Même si le pic de résonnance présente une incertitude de 0.7% Hz, les deux fréquences f1 et f2 sont déterminées avec une incertitude de l’ordre de grandeur de la précision de nos mesures (f2 – f1 ≈ 1/100ème Hz), ce qui n’est pas satisfaisant. Il faudrait augmenter la fréquence d’échantillonnage de nos appareils, ce qui est certes possible, mais nécessite de faire un compromis sur la taille des fichiers à traiter et des informations souhaitées.
3.5.3.4 Synthèse
Il ressort de ces courbes plusieurs constats :
Les allures des modes sont pertinentes et correspondent bien à ce que l’on a l’habitude d’observer pour ce type de structure.
Il y a bien trois modes pour la direction Est-Ouest correspondant aux fréquences 1.16 Hz, 3.39 Hz, 5.10Hz. Rappelons que, avec une bonne
approximation, la théorie (modèle brochette) nous apprend que les premières fréquences pour une structure où les masses et les rigidités se répartissent suivant la suite arithmétique (1, 3, 5), ce qui semble être approximativement le cas ici. [HANS, 2002]
Le quatrième mode (6.87 Hz et/ou 7.14 Hz) est clairement un mode selon la direction NS.
Les déplacements de la base sont très faibles.
L’amortissement est difficilement calculable en raison de la précision fréquentielle choisie.
En conclusion, nous pouvons affirmer que le programme détecte bien les premiers modes de vibration de la structure et que la méthode FDD est donc bien implémentée.
4 A
PPLICATION A L
’
AUSCULTATION D
’
UNE STRUCTURE
EN PISE
4.1 La construction en pisé
4.1.1 Généralités
L’usage du matériau terre pour construire des habitations remonte à des millénaires. Des archéologues ont ainsi découvert des constructions en terre damée en Crète datant de l’âge de bronze Minoen soit plus de 3500 ans avant notre ère. Il existe encore des murs en terre fabriqués il y a plus de 1000 ans et encore en état. La terre fut et est encore utilisée comme matériau dans de nombreuses régions du monde. Le département de l’énergie américain estime que 50% de la population mondiale vit dans une construction en terre crue.
Les construction en pisé sont nombreuses dans la région et forment une partie essentielle de l’architecture vernaculaire. F. Cointeraux définit ce mode de construction dans son manuel « Ecole d’architecture rurale et économique » paru en 1790 :
« Le pisé est un procédé d’après lequel on construit les maisons avec de la terre, sans la soutenir par aucune pièce de bois, et sans la mélanger ni de paille ni de bourre. Il consiste à battre, lit par lit, entre des planches, à l’épaisseur ordinaire des murs de moellons, de la terre préparée à cet effet. Ainsi battue elle se lie, prend de la consistance, et forme une masse homogène qui peut être élevée à toutes les hauteurs données pour les habitations. »
Aujourd’hui, les couches de terre ne sont plus battues à la main mais compressées à l’aide de dames pneumatiques, ce qui permet d’augmenter la densité du pisé et la vitesse de production. Il s’agit donc de former des lits de 10 à 15 cm de haut environ constitutifs de murs relativement épais (variant entre 30 à 50 cm) pour assurer une meilleure stabilité.
Figure 13 : échantillon de pisé réalisé par Nicolas Meunier
4.1.2 Réglementation parasismique et construction en pisé
Le principal problème que connaît ce mode de construction concerne le comportement du pisé vis-à-vis de l’eau. Les études scientifiques se sont donc naturellement basées sur cette thématique. Il apparaît toutefois important de ne pas négliger les aspects dynamiques car la réglementation parasismique actuelle n’est pas adaptée au pisé. Comment évaluer la vulnérabilité sismique du pisé d’autant plus que ce matériau dépend fortement du type de terre utilisé et du « coup de main » de l’artisan ?
Cette question de la vulnérabilité des structures doit permettre à terme d’évaluer le type d’intervention à réaliser : maintien en l’état, renforcement, destruction, etc.
Enfin, en France, le nombre de logements en pisé est estimé à 500 000, d’ après [MICHEL&POUDRU, 1997]. On peut observer l’importante présence de ce patrimoine en zone sismique :
Figure 14 : carte de l’aléa sismique et des zones de constructions en pisé et en baug - Source : [Mottier, 2007]
4.2 Etude d’un mur en pisé
4.2.1 Présentation
En attendant de pouvoir mener des mesures in situ, j’ai utilisé des résultats de campagnes expérimentales menées avant mon arrivée. J’ai ainsi pu exploiter les mesures faites sur un mur en pisé à Dagneux situé au sud du département de l'Ain, en décembre 2014.
L’intérêt d’une telle étude in situ réside dans le fait qu’il est très difficile de caractériser une structure en pisé en laboratoire. En effet, le prélèvement d’un échantillon caractéristique est quasi-impossible car il nécessite d’humidifier le pisé et donc de modifier sa teneur en eau. Or, l’analyse modale permet de récupérer de façon non destructive une information structurelle qui nous permettra d’estimer, sous certaines hypothèses, des caractéristiques mécaniques (module d’Young)
Précisons que ces mesures ont été réalisées non pas avec la méthode du bruit ambiant mais avec un « choc » : on frappe avec un marteau dans différentes directions et on observe la réponse de la structure, on fait l’hypothèse que l’on reste en petites déformations. Partant du fait que des études ont montré la viabilité de la méthode FDD pour ce type d’excitation [Maiassi, 2011]. Un des problèmes rencontrés concerne l’échantillonnage des données à 1024 Hz, le logiciel Grilla® ne permet pas d’exporter de telles données, il faut donc les rééchantillonner à des fréquences inférieures. Cette opération s’est avérée peu satisfaisante notamment pour la suite lorsqu’il fallait synchroniser l’ensemble des capteurs. Heureusement, il y avait un capteur qui était réglé à 512 Hz, j’ai donc décidé de poursuivre mon étude uniquement avec les résultats de cet appareil. L’exploitation des résultats ne repose donc que sur la matrice PSD dans chaque direction EW et NS.
Figure 15 : géométrie du mur en pisé de Dagneux et position des capteurs
Capteur Position Fréquence d’échantillonnage (Hz) 70 Sommet embase béton 1024
71 Sommet Gauche 1024
75 Sommet Centre 1024
76 Sommet Droit 512 exploitable
4.2.2 Démarche adoptée
L’objectif de cette étude a été pour moi de réfléchir sur la pertinence ou non d’utiliser la modélisation par éléments finis pour les murs en pisé. La démarche employée ici s’inspire de la thèse de [BUI, 2008] qui consiste à déterminer les caractéristiques mécaniques d’une structure en pisé à partir de mesures dynamiques in situ.
J’ai donc exploité les mesures du capteur 76 pour extraire les informations modales, puis j’ai modélisé le problème de deux façons : un modèle analytique (poutre de cisaillement ou de Timoshenko), et un modèle numérique simple (simulation sous Comsol Multiphysics®). L’idée étant, dans un premier temps, de comparer les différentes fréquences obtenues sans entrer dans le détail de la nature des modes ou des déformées
Ensuite, j’ai calé les deux types de modélisation par rapport à la fréquence fondamentale, afin d’évaluer et de comparer les modules de Young correspondant aux résultats obtenus.
4.2.3 Résultats obtenus
4.2.3.1 Traitement des informations
Comme signalé plus haut, seule la PSD nous est accessible avec un seul capteur. L’exploitation des données du capteur 76 figure ci-dessous :
Figure 16: spectres obtenus pour les mesures du mur de pisé de Dagneux suivant les deux directions
On observe bien différents pics :
le premier, non représenté mais présent sur les deux spectres et de l’ordre de 0.2 Hz, relève sans doute de la distorsion du signal enregistré i.e. la dérive basse fréquence qui résulte du capteur.
Un pic à 3.6 Hz très significatif. Il apparaît certes dans les deux spectres, mais il y a près de 37 dB d’écart entre les deux soit un rapport d’environ 70. On peut raisonnablement affirmer qu’il s’agit donc du premier mode NS.
Un pic à 10.3 Hz que l’on retrouve avec la même amplitude dans les 2 directions. Il s’agit probablement d’un mode de torsion.
Un pic 13.7 Hz uniquement dans la direction EW. Il s’agit probablement du premier mode dans cette direction.
Un pic 17.1 Hz uniquement dans la direction NS. Il s’agit probablement du deuxième mode dans cette direction.
L’utilisation d’un seul capteur ne nous dit rien sur la nature des modes détectés, et l’utilisation de la PSD a des limites, notamment l’impossibilité de repérer des modes doubles ou très rapprochés. Voilà pourquoi les identifications précédentes ne peuvent être que des hypothèses qui nécessiteront des relevés complémentaires à 128 Hz pour un traitement FDD (plus efficace que la PSD seule). En attendant, nous pouvons tenter d’identifier la nature des modes en utilisant des outils de modélisation.
4.2.3.2 Modélisation par éléments finis
L’avantage de la modélisation par éléments finis est qu’elle est plus précise que le modèle analytique que nous présenterons ensuite car elle prend en compte d’autres effets possibles comme la torsion. Elle suppose que le matériau est isotrope, ce qui n’est à priori pas le cas étant donné la superposition de couches composant le matériau.. Après avoir essayé le logiciel CESAR LCPC®, je me suis orienté vers le logiciel COMSOL Multiphysics® pour modéliser très simplement le mur en pisé. Le logiciel permet d’avoir une première idée visuelle des différentes déformées et fréquences propres d’un élément.
On définit tout d’abord la géométrie : un parallélépipède obtenue par extrusion d’un rectangle. On présuppose ainsi l’homogénéité du mur et l’encastrement à la base (je n’ai pas eu à modéliser l’embase béton)
Ensuite on définit le maillage du mur. Ici, il est réalisé automatiquement (maillage fin) et comporte 8152 éléments tétraédriques et 2169 nœuds.
Figure 17 : maillage fin du mur en pisé
Puis, on définit les caractéristiques des matériaux et les conditions aux limites à l’aide des résultats trouvés dans la littérature [Bui, 2007] :
Ici, le matériau est considéré comme homogène et isotrope. J’ai pris un coefficient de poisson forfaitaire de 0.15 et une masse volumique de 1892 km/m3, valeurs plausibles pour un pisé classique. Le module de Young varie de 50 MPa à 500 MPa.
J’ai considéré que le mur était encastré à son extrémité sans entrer dans les détails sur la nature de l’embase en béton.
Enfin, on lance le calcul et on peut visualiser les résultats sous forme de déformées du mur par mode. On règle pour cela le graphique de post-traitement de telle sorte à observer les déformations suivant l’axe OZ.
Les résultats d’une simulation faite avec un module de Young de 200 MPa figurent ci-dessous :
Mode Fréquence Type
1 3.6 Flexion, NS
2 8.9 Flexion, EW
3 10.4 Torsion
4 19 Flexion, NS
On constate que les paramètres de la simulation permettent d’obtenir la valeur du premier mode de flexion NS à 3.6 Hz de façon très satisfaisante. De même, le second mode NS est bien estimé (19 Hz au lieu de 17.1Hz)
Toutefois, on observe ici que la simulation semble « inverse » les modes 2 et 3 par rapport à ce que l’on a mesuré in situ. Le mode de torsion est ici le 3ème mode alors qu’il apparaissait comme étant le deuxième précédemment. J’ai multiplié les simulations en faisant varier le module de Young et la masse volumique, mais j’obtiens toujours ce résultat. Il faut noter que les deux fréquences obtenues sont très proches, j’émets l’hypothèse que la PSD ne parvient pas à distinguer ces 2 modes rapprochés. En zoomant sur cette partie du spectre EW, on observe en effet un pic dissymétrique par rapport au pic à 13.7 Hz, peut-être que les 2 pics supposés rapprochés ont fusionné.
Figure 19 : zoom sur le spectre EW et hypothèse de modes rapprochés
En bref, il faudrait poursuivre les investigations en relançant des mesures afin d’analyser la nature des modes plus précisément.
Enfin, les erreurs sur les modes peuvent être calculées, en même temps, j’ai légèrement fait varier E et ρ pour essayer de caler les différentes fréquences. Il s’avère impossible d’obtenir un couple de valeurs permettant d’obtenir les quatre premiers modes avec précision. Cela n’a pas d’importance car, en génie parasismique, seuls les deux premiers modes nous intéressent en général. Ainsi, le couple (E = 220 MPa et ρ = 1800 kg/m3) semble convenir à notre cas (cf. ci-dessous).
Figure 20 : recherche des caractéristiques mécaniques optimales
4.2.3.1 Modèle poutre de Timoshenko
Ce modèle de poutre prend en compte les effets de cisaillement, mais néglige les effets de torsion. On considère une poutre de hauteur H encastré à la base, libre à la tête :
Schéma Notation Paramètre
Figure 21 : modèle de poutre utilisé
S Section Sc Section de cisaillement I Inertie E Module de Young G Module de Cisaillement ρ Masse volumique u Déplacement de la fibre moyenne
β Rotation par rapport à la fibre moyenne
α = u’ + β Rotation totale de S T Effort tranchant M Moment fléchissant Les conditions aux limites du problème sont :
𝑢(0, 𝑡) = 0 𝛼(0, 𝑡) = 0 𝜎𝑧(𝐻, 𝑡) = 0
A la hauteur z, l’équilibre local de la section est donné par : −𝜌𝑆𝜕 2𝑢 𝜕𝑡2 = 𝜕𝑇 𝜕𝑧 −𝑇(𝑧) =𝜕𝑀 𝜕𝑧
La résistance des matériaux nous informe de la loi de comportement suivante : 𝑇(𝑧) = 𝐺𝑆𝑐𝛽
𝑀(𝑧) = 𝐸𝐼𝜕𝛼 𝜕𝑧
Ensuite, on se place dans le cas d’une réponse harmonique : 𝑢(𝑧, 𝑡) = 𝑓(𝑧)𝑒𝑖𝜔𝑡
On obtient alors l’équation dynamique du problème : 𝜌𝑆𝜔2𝑓(𝑧) = 𝐸𝐼𝑓(4)(𝑧) +𝐸𝐼𝜌𝑆𝜔2
𝐺𝑆𝑐 𝑓(2)(𝑧)
La solution générale est obtenue grâce au logiciel de calcul formel Maple : 𝑓(𝑧) = 𝑎 𝑐𝑜𝑠 (𝛿1 𝑥 𝐿) + 𝑏 𝑠𝑖𝑛 (𝛿1 𝑥 𝐿) + 𝑐 𝑐ℎ (𝛿2 𝑥 𝐿) + 𝑑 𝑠ℎ(𝛿2 𝑥 𝐿)
Les constantes a, b, c et d dépendent des conditions initiales et les paramètres δ1 et δ2 vérifient : 𝛿12𝛿 22 = 𝜌𝑆𝜔2𝐿4 𝐸𝐼 𝛿12− 𝛿 22 = 𝜌𝑆𝜔2𝐿2 𝐺𝑆𝑐
En exploitant les conditions aux limites, on obtient un système de quatre équations à quatre inconnues. Ce système possède une solution non trivial si et seulement si son déterminant est nul, on obtient alors l’équation aux fréquences ci-dessous :
2 (1 + 𝑐𝑜𝑠 (𝛿1𝜋2) 𝑐ℎ (𝛿2𝜋2)) 𝛿12𝛿22− 𝑠𝑖𝑛 (𝛿1𝜋2) 𝑠ℎ (𝛿2𝜋2) 𝛿1𝛿2(𝛿12− 𝛿22) + 𝑐𝑜𝑠 (𝛿1𝜋2) 𝑐ℎ (𝛿2𝜋2) (𝛿12− 𝛿22)2= 0
En utilisant le couple (E = 220 MPa et ρ = 1800 kg/m3), la résolution numérique de cette équation se fait à l’aide d’un script Matlab que nous donnons en annexe B, qui nous permet d’obtenir les premiers modes pour les directions X (EW) et Y (NS) :
Nous obtenons f1NS = 2.6 Hz, f2NS = 15.6 Hz, f1EW = 10.5 Hz.
Il faut augmenter le module de Young à 450 MPa et la masse volumique à 1892 kg/m3, pour obtenir le premier mode expérimental de 3.6 Hz
4.2.3.2 Comparaisons et conclusion
Voici les fréquences obtenues par les trois méthodes : (E = 220 MPa et ρ = 1800 kg/m3)
Mode Nature FDD Timoshenko Eléments finis
1 Flexion NS 3.6 2.6 3.8
2 Flexion EW 10.3 10.5 9.6
3 Torsion 13.7 11.2
4 Flexion NS 17.1 15.6 20.5
Les premiers modes sont correctement évalués par le modèle de Timoshenko et la modélisation EF. Toutefois, seule cette dernière fournit une évaluation du 3ème mode qui est probablement un mode de torsion. Or, ces effets de torsion ne sont pas pris en compte par la poutre de Timoshenko. Pour s’assurer qu’il s’agit bien d’un mode de torsion, il faudrait relancer les mesures pour voir si cette fréquence propre est observée sur une autre ligne de capteur donc sur une autre direction, en veillant à bien appliquer la FDD pour distinguer les modes supposés rapprochés ici.
Le 4ème mode, est mieux évalué par la méthode EF que Timoshenko. La simplicité de notre modélisation et de nos hypothèses (homogénéité, isotropie, élasticité) sont sans doute la cause de cette différence.
Enfin, en croisant les résultats de la modélisation et les résultats expérimentaux obtenus in situ, on peut avoir une idée du module élastique du matériau constituant le mur (environ 220 MPa) et de sa masse volumique (ρ = 1800 kg/m3). Il pourrait être intéressant d’évaluer ces valeurs à différents moments (conditions climatiques différentes) pour observer l’influence de la teneur en eau sur les propriétés mécaniques du pisé.
4.3 Etude d’une maison en bois/pisé
4.3.1 Introduction
Dès le début de mon TFE, il nous a semblé intéressant de réaliser des mesures in situ sur des structures existantes. Pour cela, nous avons pris contact avec un artisan, Nicolas Meunier, qui a réalisé de nombreux projets neufs ou de réhabilitation dans la région. La campagne de mesures a pu être réalisée en fin de stage et a concerné deux maisons : une à Saint-Antoine-l'Abbaye dans le département de l'Isère et une à Chasselay située dans le département du Rhône. J’ai participé à la seconde auscultation.
Cette maison récente a été construite en 2009-2011 et est la propriété de la famille Jacquet. Elle se compose d’une structure mixte en pisé/bois sur deux niveaux et repose sur un
Figure 22 : photo de la maison Jacquet à Chasselay
La terre utilisée provient de Saint Didier de Formans, l’artisan souhaite en effet utiliser des matériaux locaux situés à moins de 20 km du lieu de construction pour respecter les exigences du circuit court et du développement durable.
Figure 23 : situation de la maison Jacquet et origine de la terre utilisée
Enfin, les principaux objectifs de cette campagne de mesures ont été, à partir des mesures de vibrations de l’ensemble de la structure et du traitement des données, de :
Récolter un maximum d’informations empiriques relatives au comportement dynamique du bâtiment.
De savoir si l’ensemble constituait une structure monolithique. De connaître les gammes des fréquences de résonnance.
4.3.2 Les conditions expérimentales
Accompagné de mon tuteur, M. Hans, et de l’artisan M. Meunier, nous nous sommes rendus à la maison Jacquet dans l’après-midi du 5 juin 2015. Les conditions climatiques étaient particulièrement favorables : temps ensoleillé et sec, aucun vent pouvant perturber les mesures. Par ailleurs, la maison se situe dans une zone assez loin des sources de vibrations urbaines parasites.
La première étape a été de synchroniser les quatre capteurs. En raison d’un problème matériel, nous n’avons pas pu utiliser la synchronisation par antenne radio, il a donc fallu utiliser la géolocalisation par GPS qui a été réalisée dans le jardin de la propriété.
La fréquence d’échantillonnage des appareils a été réglée à 128 Hz.
Ensuite, nous avons fait un tour de la maison afin de déterminer la position des capteurs. Les trois murs en pisé de 4.25m de hauteur, étant construit en L, il nous a semblé intéressant de réaliser plusieurs configurations afin d’étudier plus précisément la nature des modes enregistrés. Ci-dessous le plan simplifié de la maison (cf. Annexe C)
Figure 24 : plan simplifié de la maison
Nous avons ainsi réalisé quatre configurations obtenus en déplaçant les capteurs après une période de mesure suffisante (environ 20 minutes), sans éteindre les appareils. Les enregistrements ont donc été continus pendant toute l’expérimentation. Ce protocole a nécessité de traiter ultérieurement les données – d’une durée totale de 1h30 environ – pour sélectionner les intervalles de mesures les moins perturbées par les déplacements.
Seuls les deux murs sud étaient directement accessibles, nous n’avons pas pu ausculter le mur nord directement.
Les premiers modes de déformations unidirectionnelles (EW et NS) sont les premiers recherchés en plaçant des capteurs horizontalement. Les modes ne sont en général pas purs, les modes de déformations unidirectionnelles pouvant être couplés avec un balancement de la fondation ou un mode de torsion. Il s’agira alors d’excentrer le plus possible les différents capteurs par rapport à l’axe du bâtiment (pour chercher les modes de torsion par exemple.)
4.3.3 Résultats obtenus
4.3.3.1 Les enregistrements
Les capteurs ont enregistré de façon continue pendant près de 90 minutes avec une fréquence de 128 Hz, donc également pendant les changements de configuration ou les perturbations dans la maison.
Les différents enregistrements ont été synchronisés à l’aide du logiciel GRILLA. Au final, il y a environ 700000 points de mesures. Comme le montre le graphique ci-dessous qui montre l’évolution de la mesure selon EW pour chaque capteur au cours du temps, , les capteurs sont bien synchronisés. On peut définir quatre « fenêtres » de mesures pour les quatre configurations en prenant soin de nous placer là où elles sont le moins perturbées par les déplacements.
J’ai finalement choisi 100 000 points de mesure pour chaque fenêtre, ce qui représente environ 13 minutes d’enregistrement. Cette durée est suffisante pour que le bruit ambiant soit assimilé à un bruit blanc stationnaire, du moins dans la gamme fréquentielle d’´etude [0-25Hz], [Hans, S. & Boutin, C., Ibraim, E., Roussillon, P., 2005]
Notons enfin que l’analyse des données a révélé le dysfonctionnement du capteur 71 durant les configurations 3 et 4. Nous ignorons la cause de ce problème pour le moment.
4.3.3.2 Résultats obtenus
On représente ci-dessous la position des quatre capteurs dans la maison, avec leur orientation définie simplement par :
Figure 25 : symbole utilisé pour un capteur avec son orientation
La figure ci-dessous schématise par exemple la position des quatre capteurs lors de la configuration 1 :
Les photographies ci-dessous illustrent les positions des capteurs dans la maison :
Figure 27 : photographies des capteurs positionnés selon les différentes configurations
On remarque que certains capteurs peuvent être « déphasés » ; par exemple, dans la 1ère configuration, le capteur 71 fait un angle de 90° par rapport aux autres: il faudra faire attention à bien traiter les données directionnelles («EW » et « NS ») en accord avec les autres capteurs. Les configurations ont été définies à partir des segments de points suivants :
Capteur 70 Capteur 71 Capteur 75 Capteur 76
C on fi gu ra ti on 1
Sommet mur sud-est Sommet mur sud-ouest Derrière Poêle (1er) Derrière Poêle (RDC)
C on fi gu ra ti on 2
Sommet mur sud-est Sommet mur sud-ouest Mur grenier (1er) Derrière Poêle (RDC)
C on fi gu ra ti on 3
Le long du mur sud-est Le long du mur sud-ouest Mur grenier (1er) Derrière Poêle (RDC)
C on fi gu ra ti on 4
Configuration Segment de points
1 [50000 – 150000]
2 [250000 – 350000]
3 [430000 – 530000]
4 [560000 – 660000]
Sachant que l’on utilisé les quatre capteurs et que trois directions sont mesurées pour chaque capteur, on obtient, par inter-corrélation, une matrice DSP de taille 12 x 12 pour chaque fréquence discrétisée. Les 100 000 points de mesures sont traités de telle sorte à opérer des recouvrements de 50 % de chaque segment. On obtient alors 16385 fréquences et autant de matrice PSD. On récupère alors la 1ère valeur singulière qui correspond aux modes propres. Les spectres figurent ci-dessous pour des fréquences inférieures à 30 Hz et selon une échelle logarithmique en ordonnée :
4.3.3.3 Commentaires sur les résultats
On constate que les pics sont certes discernables, mais moins bien que dans le cas de la maquette précédent ou du mur en pisé. Il subsiste un bruit qui diminue la qualité du spectre obtenu. J’ai essayé d’augmenter le nombre de points (150 000 au lieu de 100 000), mais le bruit subsistait. Peut-être cela est-il du à la fréquence d’échantillonnage de 128 Hz ?
On retrouve la dérive basse fréquence de 0.2 Hz due aux capteurs.
- Un pic très prononcé à 20.1 Hz environ se retrouve dans chaque spectre. Sa largeur de bande étant étroite, il est probablement d’origine extérieure : une machine (20 Hz correspond à 1200 tour/min soit le cycle typique d’une essoreuse) ou un engin quelconque se trouvait probablement à proximité de la maison durant les mesures. Toutefois, si l’on observe les spectres sur une même échelle linéaire (figure ci-dessous), on constate une forte diminution de l’amplitude liée à cette fréquence dans les configurations 3 et 4. On peut alors formuler plusieurs hypothèses :
Soit l’appareil mécanique a diminué sa puissance à partir de la configuration 3 Soit la défaillance du capteur 71 explique cette baisse de pic, mais alors pourquoi
ne l’observe-t-on pas sur les autres pics ?
Soit, et cette hypothèse suggère des études complémentaires, les murs en pisé amplifient cette vibration. En effet, les capteurs étaient positionnés sur les murs dans les deux premières configurations, alors qu’ils étaient dans la maison dans les suivantes.