© David Dugré, 2019
AgriEAU
: outil géomatique d’aide à la gestion et
l'aménagement des cours d’eau ruraux
Mémoire
David Dugré
Maîtrise en génie agroalimentaire - avec mémoire
Maître ès sciences (M. Sc.)
AgriEAU – Outil géomatique d’aide à la gestion et
l’aménagement des cours d’eau ruraux
Mémoire
Maîtrise en génie agroalimentaire
David Dugré
Sous la direction de :
ii
Résumé
Sous l’initiative de l’Université Laval, un projet collaboratif a été mis sur pied afin de répondre au besoin des municipalités régionales de comté (MRC) d’avoir un outil pour les aider à procéder à la création d’un plan d’action face à la gestion et l’aménagement de leurs cours d’eau. Ce projet, qui inclut la participation de l’Université de Concordia et l’Institut de Recherche et Développement en Agroenvironnement (IRDA), a comme objectif de développer un outil informatique qui permet d’effectuer des analyses de cours d’eau pour identifier les zones problématiques potentielles.
Dans ce cadre, le projet de maîtrise a consisté à participer au développement du progiciel. Les objectifs du projet de maîtrise ont été de supporter le projet en effectuant une revue de littérature, de participer à son développement, de valider que le progiciel puisse bien diagnostiquer certaines problématiques d’un cours d’eau et, finalement, de valider les méthodes de traitements répertoriés.
Supporté par la revue de littérature, le progiciel développé est constitué de onze outils qui permettent de produire les éléments nécessaires à l’analyse des cours d’eau. De ces onze outils, dix ont été supportés (testés et documentés) et un a été complètement développé dans le cadre du projet de maîtrise pour intégrer l’outil « Qmax_PBV » qui permet de calculer les débits maximaux.
Les données produites par le progiciel nous confirment la possibilité d’effectuer un diagnostic d’un bassin versant agricole. À partir des données du progiciel, les différents profils transversaux ont été caractérisés soit comme les profils stables, ceux qui s’érodent ainsi que ceux qui présentent de la sédimentation. De cette caractérisation, les observations notées sur le terrain ont été confirmées.
Finalement, la méthode d’extraction des profils transversaux qui a été utilisée dans l’un des outils du progiciel a été validée dans le cadre du projet. La méthode de définir des profils transversaux à partir de relevés LiDAR (Roelens et al., 2016) avait été développée avec des LiDAR de densité de 16 pts/m2. L’objectif a été de définir
s’il est possible de l’appliquer avec un LiDAR d’une densité de 1pt/m2. L’évaluation qualitative de 21 profils nous
a permis de déterminer que la largeur minimale de la zone d’échantillonnage de points LiDAR considérée comme convenable pour l’obtention des profils est de 6 m.
iii
Table des matières
Résumé ... ii
Table des matières ...iii
Liste des figures ... v
Liste des tableaux ... vii
Remerciements ... viii Introduction ... 1 1.Revue de littérature ... 2 1.1.Introduction ... 2 1.2.Éléments techniques ... 2 1.2.1.Hydrologie ... 2 1.2.2.Géomorphologie ... 6 1.3.Géomatique... 8 1.3.1.Formats de données ... 8 1.3.2.Logiciels hydrologiques ... 17
1.3.3.Algorithmes pour déterminer le réseau hydrographique ... 18
1.3.4.Langage de programmation et SIG ... 23
1.4.Modules ... 24 1.4.1.GéODEP ... 24 1.4.2.QmaxPBV ... 25 1.4.3.Géomorphologie ... 25 1.5.Législation ... 25 2.Développement du progiciel ... 27 2.1.Introduction ... 27 2.2.Hypothèse et objectifs ... 27 2.3.Matériel et méthode ... 27 2.3.1.Données disponibles ... 28
2.3.2.Choix du SIG et du langage de programmation ... 28
2.3.3.Méthodologie de développement ... 29
iv
2.4.1.Structure générale ... 29
2.4.2.Dévelopement de l’outil « Qmax_BV » ... 32
2.4.3.Documentation ... 41
2.5.Conclusion ... 42
3.Utilisation – Validation par l’application à un cas ... 43
3.1.Introduction ... 43 3.2.Hypothèse et objectifs ... 43 3.3.Matériel et méthode ... 43 3.4.Résultats ... 45 3.4.1.Géotraitement ... 45 3.4.2.Hydrologie ... 53 3.4.3.Géomorphologie ... 53
3.4.4.Analyse des résultats ... 54
3.5.Conclusion ... 55 4.Profils transversaux ... 59 4.1.Introduction ... 59 4.2.Revue de littérature ... 59 4.3.Hypothèses et objectifs ... 61 4.4.Matériel et méthodes ... 61 4.5.Site ... 62 4.6.Résultats ... 63 4.7.Conclusion ... 69 Conclusion ... 70 Bibliographie ... 71
Annexe A – Exemple de fenêtre de lancement ... 82
v
Liste des figures
Figure 1 : Représentation d’un bassin versant et sous-bassins versants
(hydrauliqueformation.blogspot.ca, 2014) ... 4 Figure 2 : Exemple d'un profil transversal (Lagacé, 2016) ... 6 Figure 3 : Exemple de profil longitudinal (Lagacé, 2016) ... 6 Figure 4 : Migration typique de méandres observée par positionnement du chenal sur
plusieurs années (Piégay et al. 2005). ... 7 Figure 5 : Exemple de points, lignes et surfaces définis en format vectoriel (Geospatial
Innovation Facility, n.d.) ... 9 Figure 6 : Représentation de la taille des cellules et résolutions de l’information dans un
raster (ESRI, 2008) ... 10 Figure 7 : Exemple de points, lignes et surfaces définis en format raster (Geospatial
Innovation Facility, n.d.) ... 11 Figure 8 : Modélisation ArcScene de la forêt en bordure de la rivière Sainte-Anne à 4 points
au m2 (Dugré, 2016) ... 13
Figure 9 : Comparaison entre un modèle numérique de surface (MNE) et un modèle
numérique de surface (MNS) (Wiki GIS, 2013) ... 15 Figure 10: Visualisation de procédure pour définir la direction d’écoulement avec
l’algorithme D8 (Cooper, 2013) ... 18 Figure 11 : Étapes de modélisation d'un cours d'eau à l’aide de l'algorithme D8 (Turcotte,
2001) ... 19 Figure 12: Exemple de conversion d’un DRLN à partir d’un format vectoriel à un format
matriciel (raster) : A) Trajet vectoriel initial B) Ajout de points au réseau vectoriel C)
Conversion des points vectoriels en coordonnées de rangées et colonnes D) Élimination des cas problématiques i) Cellules qui nécessitent deux directions ii) confluent artificiel iii) répétitions de confluents E) Remplissage des lacs F) Assignation de la valeur zéro aux
cellules non incluses dans le parcours (Turcotte, 2001). ... 20 Figure 13 : Exemple de divergence générée par un ajustement unique de la direction
d'écoulement des cellules chevauché par le DRLN : A) Cas initial B) Parcours et direction d’écoulement obtenue par le D8 C) exemple de divergence dans la direction D) exemple d’écoulement attendu suite à l’utilisation de l’approche proposée (les flèches blanches
représentent la direction d’écoulement modifié après avoir utilisé le DRLN) (Turcotte, 2001). ... 21 Figure 14: Comparaison des méthodes de définition des parcours d’écoulement avec deux
algorithmes : a) Single Flow Direction b) Multiple Flow Direction (Cooper, 2013) ... 22 Figure 15: Correspondance des outils à la procédure d’analyse des cours d’eau manuelle
avec la structure et l’interrelation entre les outils ... 30 Figure 16 : Code pour l'ajout d'un champ dans une table d'attribut associée à une carte et
pour le peuplement du champ ... 36 Figure 17 : Code pour l'extraction spatiale d'une carte vectorielle ... 36
vi
Figure 18 : Code de la concaténation de deux champs d'une table d'attribut ... 38
Figure 19 : Code d'intégration de la table SQL pour la conversion des termes et jointure à la table d'attribut ... 39
Figure 20 : Fonctions utilisées pour l'extraction des coordonnées des nœuds des extrémités des segments ... 39
Figure 21 : Échantillon de résultat contenu dans le fichier CSV « Qmax_calc_results » ... 40
Figure 22 : Titres principaux de la table des matières de la documentation d'AgriEAU (Dugré et al., 2018) ... 41
Figure 23 : Visuel du secteur du cours d'eau de l'étude de cas (Google Map,2018) ... 44
Figure 24: Liste des parcours et noms des LiDAR dans le fichier texte (.txt) ... 45
Figure 25: MNE de résolution de 5 m produit par « CreateDEM » ... 46
Figure 26: Profil transversal au niveau d’une correction de ponceau dans le bassin versant du cours d’eau Castor à Brome-Missisquoi : a) avant correction et b) après correction ... 47
Figure 27 : Position de l'exutoire et produits de l'outil « Watershed » : a) raster du bassin versant et b) raster des distances par rapport à l'exutoire ... 48
Figure 28: Éléments du bassin versant : a) le réseau de drainage avec l’identifiant des segments, b) les points longitudinaux et c) les sous-bassins versants ... 49
Figure 29: a) Disposition des profils transversaux de 30 m de longueur à intervalle de 50 m sur le réseau hydrographique de Castor avec leur identifiant respectif; b) Position des profils transversaux du réseau hydrographique du cours d’eau Castor ... 50
Figure 30 : Table d’attributs associées à la carte des points positionnant les profils transversaux ... 50
Figure 31 : Profil transversal no. 283 brute produite à partir des données LiDAR ... 51
Figure 32 : Profil transversal no. 283 lissé ... 52
Figure 33: Extraction du profil d'un cours d'eau (Roelens et al., 2016) ... 60
Figure 34 : Représentation imagée de a) la déviation verticale et b) la différence relative de l'aire (Roelens et al., 2016) ... 60
Figure 35 : Profils transversaux lissés du profil transversal no. 101 pour les largeurs de données LiDAR de : a)1 m, b)2 m, c)3 m et d)4 m ... 64
Figure 36 : Profils transversaux lissés du profil transversal no. 101 pour les largeurs de données LiDAR de : e)5 m, f)6 m et g)7 m... 65
Figure 37 : Profils transversaux lissés du profil transversal no. 244 pour les largeurs de données LiDAR de: a)1 m, b)2 m, c)3 m et d)4 m ... 66
Figure 38 : Profils transversaux lissés du profil transversal no. 244 pour les largeurs de données LiDAR de : e)5 m, f) 6 m et g)7 m ... 67
Figure 39 : Graphique des notes par rapport au nombre de points ... 68
vii
Liste des tableaux
Tableau 1 : Classification des points LiDAR dans un fichier LAS... 14
Tableau 2 : Données nécessaires au progiciel et sources ... 28
Tableau 3 : Cartes produites par le module « Géotraitement » ... 31
Tableau 4 : Méthodes de calcul de tc, Ru, CN et C... 34
Tableau 5 : Échantillon de la table d'attribut complète des points positionnant les profils transversaux ... 52
Tableau 6 : Vitesses maximales admissibles correspondant à la végétation et la pédologie du cours d’eau Castor (annexe E, Dugré et al. 2018) ... 54
Tableau 7 : Résultats présentés dans le CSV produit pour chaque tronçon de cours d'eau et des récurrences variées ... 57
Tableau 8 : Données produites par « CheckStability »... 58
viii
Remerciements
Ce projet d’envergure n’aurait pas été possible sans le travail et l’aide apporté par les différents participants, dont la collaboration de l’équipe du GRIAGE soutenue par Pascale Biron de l’Université de Concordia, Aubert Michaud et Mohammed Niang de l’Institut de Recherche et Développement en Agroenvironnement (IRDA), Simon Lajeunesse de la municipalité régionale de comté de Brome-Missisquoi et de Élisabeth Bussière et Pierre-Luc Bégin du Ministère de l’Environnement et Lutte contre le Changement Climatique (MELCC). Je souhaite tout particulièrement remercier Robert Lagacé pour la prise en charge du projet, son orientation, son implication dans le développement et son soutien sans quoi le tout n’aurait jamais été possible.
Pour le travail et l’aide apporté lors de toutes les étapes de l’élaboration de l’outil, un grand merci à Guénolé Choné (professionnel de recherche – Concordia).
Finalement, j’aimerais aussi souligner la contribution non négligeable de Pier-Philippe Labrie (MRC- Brome-Missisquoi), Arianne Blais-Gagnon (IRDA), Charles Frenette-Vallières (stagiaire à l’IRDA) et Françoise Tadif (étudiante à l’Université Laval).
1
Introduction
Ce mémoire a été réalisé dans le cadre d’un projet collaboratif entre l’Institut de Recherche et Développement en Agroenvironnement (IRDA), l’Université de Concordia et l’Université Laval. L’objectif du projet consistait à élaborer un progiciel devant fournir des informations de base et essentielles pour l’étude et l’aménagement des cours d’eau afin de permettre des analyses plus complètes. Le progiciel (AgriEAU) est le résultat de l’intégration des travaux antérieurs et présents des trois organisations. Plus précisément, l’Université de Concordia a apporté le module « Géomorphologie » qui traite de la stabilité des cours d’eau. L’Université Laval a, pour sa part, mis à disposition l’application « Qmax_PBV » qui effectue les calculs des débits pour différentes récurrences et ce, selon différences méthodes. Finalement, l’IRDA a mis à disposition l’application « GéoDEP » qui évalue l’exportation de sédiments et nutriments d’un territoire. Pour regrouper le matériel existant et compléter l’information nécessaire à l’analyse d’un cours d’eau, des traitements et des outils ont dû être développés. Le développement a été effectué avec une vision de logiciel libre, ce qui offre la possibilité d’une distribution gratuite et sans licence restrictive, ainsi que la possibilité de développement à long terme avec des tierces parties.
Le travail effectué dans le cadre du mémoire a consisté à effectuer une revue de littérature des méthodes et outils disponibles pour le développement, participer à la définition de la structure de traitement, développer certains outils, tester les outils développés, valider les méthodes de traitements, procéder à la création de la documentation du progiciel et valider les résultats sur un cas identifié.
Le mémoire se divise en quatre chapitres. Tout d’abord, le premier chapitre présente la revue de littérature qui identifie et décrit les éléments d’intérêt pour le progiciel. Par la suite, le deuxième chapitre décrit en détail le développement du progiciel et le troisième chapitre présente la validation des résultats obtenus par AgriEAU avec l’étude d’un cas. Finalement, le quatrième et dernier chapitre présente l’analyse effectuée pour évaluer la possibilité d’utiliser une méthode d’extraction des profils transversaux des cours d’eau en utilisant des relevés LiDAR de faible densité (1 point/m 2) au lieu d’un relevé LiDAR de haute densité (16 points /m2).
2
1. Revue de littérature
1.1. Introduction
La revue de littérature est la base du projet de développement du progiciel en fournissant l’information de référence pour déterminer les étapes de traitements à effectuer, identifier les méthodes de traitements ainsi qu’identifier les choix au niveau de la méthodologie et du matériel. Le contenu de cette section est séparé en quatre parties.
La première partie présente les éléments techniques pour élaborer l’analyse d’un cours d’eau en abordant l’hydrologie et la géomorphologie. La deuxième partie présente les éléments de géomatique d’intérêt lors de l’étude des cours d’eau en abordant les formats de données, les outils hydrologiques disponibles, les algorithmes utilisés en hydrologie, les méthodes de traitements répertoriées et le langage de programmation. La troisième partie présente sommairement les modules (GéODEP, QmaxBV et Géomorphologie) qui ont été à l’origine du projet AgriEAU. Finalement, la quatrième partie présente la législation qui a été adoptée en 2018 et qui soulève le besoin d’un outil d’aide à la gestion et l’aménagement des cours d’eau afin d’aider les MRC à produire un plan régional des milieux humides et hydriques.
1.2. Éléments techniques
Cette section est une présentation de la méthodologie sur laquelle se base les calculs d’hydrologie (écoulement) et de géomorphologie (stabilité) pour les cours d’eau d’une zone d’étude. Les deux domaines sont intimement liés puisque les résultats des calculs hydrologiques (débits et vitesses) sont essentiels pour procéder à ceux de géomorphologie (puissance spécifique et vitesse admissible).
1.2.1. Hydrologie
L’hydrologie est définie comme étant l’étude du cycle de l’eau et permet de définir les débits, soit le volume d’eau traversant une aire perpendiculaire au cours d’eau à un temps déterminé.
Le débit est une valeur définie ponctuellement dans le temps et l’espace puisqu’il dépend du volume d’eau drainé sur le secteur qui l’influence. Par exemple, la présence d’une précipitation sur le territoire étudié mène à une augmentation ponctuelle du volume à drainer, ce qui augmente le débit temporairement.
Puisque les débits varient, pour des raisons d’uniformité et pour la conception d’ouvrages hydrauliques, les débits sont évalués pour quelques récurrences. Ces récurrences sont reliées à l’intensité des précipitations sur le bassin versant qui est la délimitation pour le partage des eaux selon l’élévation du sol et dont toute l’eau y
3
tombant afflue au point le plus bas (exutoire) et l’aire drainée (figure 1). Par exemple, si une précipitation est observée une fois aux 10 ans, le débit correspondant à la crue est un débit de récurrence 10 ans. Ces périodes concordent aussi avec les pluies les plus importantes et donc les débits les plus importants. Les récurrences normalement analysées sont celles de 2, 5, 10, 20, 25, 50 et 100 ans.
La méthode la plus simple pour calculer un débit est la méthode rationnelle (MDDELCC, 2017). Cette méthode est valide pour évaluer les débits de pointe des bassins versants d’une superficie inférieure à 25 km2.
L’équation 1 présente la formule du calcul du débit. 𝑄𝑝= 𝐶 𝐼𝑃 𝐴𝑏 360 [Éq. 1] 𝑂ù 𝑄𝑝∶ 𝐷é𝑏𝑖𝑡 𝑑𝑒 𝑝𝑜𝑖𝑛𝑡𝑒 𝑑𝑢 𝑏𝑎𝑠𝑠𝑖𝑛 𝑣𝑒𝑟𝑠𝑎𝑛𝑡 ( 𝑚3 𝑠 ) 𝐶 ∶ 𝐶𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑑𝑒 𝑟𝑢𝑖𝑠𝑠𝑒𝑙𝑙𝑒𝑚𝑒𝑛𝑡 (−) 𝐼𝑝: 𝐼𝑛𝑡𝑒𝑛𝑠𝑖𝑡é 𝑑𝑒 𝑙𝑎 𝑝𝑟é𝑐𝑖𝑝𝑖𝑡𝑎𝑡𝑖𝑜𝑛 ( 𝑚𝑚 ℎ ) 𝐴𝑏 ∶ 𝑆𝑢𝑝𝑒𝑟𝑓𝑖𝑐𝑖𝑒 𝑑𝑢 𝑏𝑎𝑠𝑠𝑖𝑛 𝑣𝑒𝑟𝑠𝑎𝑛𝑡 (ℎ𝑎)
Le facteur C est directement influencé par le territoire puisqu’un territoire aura tendance à présenter de nombreuses irrégularités telles que la présence de milieu agricole, de déforestation ou d’urbanisation. Afin de réduire ces variations et d’obtenir des résultats plus fiables, il est possible de subdiviser le bassin versant en plusieurs sous-bassins selon le réseau hydrographique. Le choix de la valeur du facteur C est encadré par des tables dédiées à cette fin (Stämpfli et al. 2007).
Le facteur Ip est quant à lui déterminé par le temps de concentration (MDDELCC, 2018). Ce temps est ensuite
utilisé avec les courbes IDF (Intensité – Durée – Fréquence) ou HDF (Hauteur – Durée – Fréquence) pour définir la hauteur d’eau tombant sur le territoire en millimètres pour la durée de temps de concentration et la récurrence choisie.
1.2.1.1. Temps de concentration
Le temps de concentration est défini comme étant le temps nécessaire à une goutte d’eau pour effectuer le trajet le plus long à partir des limites du bassin versant jusqu’à son exutoire. Ce temps permet de définir deux éléments.
Le premier est un aperçu de l’intensité de réaction du bassin. Plus le temps de concentration est court, plus la crue du débit est rapide. Cet élément est aussi relié à la forme du bassin. Un temps court correspond habituellement à un petit bassin pentu, de forme compacte et imperméable.
4
Le deuxième élément permet d’estimer la durée de la pluie nécessaire pour que tout le bassin contribue à l’écoulement. Par exemple, si le temps de concentration est de 2 h, pour une pluie constante et uniforme, le débit sera maximisé au bout de 2 h et le temps de sollicitation est alors de 2 h. Cette valeur permet de déterminer la durée de précipitation lors de la mise sur pied de projets.
Plusieurs formules existent pour évaluer ce temps (Kirpich 1940, Chow 1962, Watt et Chow 1985) et l’élément reliant toutes ces équations est la longueur de parcours (L) et la pente du cours d’eau (S).
Figure 1 : Représentation d’un bassin versant et sous-bassins versants (hydrauliqueformation.blogspot.ca, 2014) 1.2.1.2. Courbes IDF - HDF
Avec les stations météorologiques au Québec, la hauteur d’eau et la durée des pluies ont été répertoriées par secteur et ont permis de créer des courbes qui définissent la hauteur d’eau pour des précipitations de durée déterminée, le tout selon la récurrence. Il s’agit des courbes IDF (Intensité – Durée – Fréquence) ou HDF (Hauteur – Durée – Fréquence) qui sont accessibles auprès de AgroMétéo (AgroMétéo, 2018).
1.2.1.3. Vitesse
À partir du débit, il est possible de calculer la vitesse d’écoulement en se basant sur l’équation 2. Cependant, l’aire est impossible à obtenir telle quelle. Vient alors en compte l’équation 3 qui permet de transformer le terme de la vitesse.
5 𝑉 =1 𝑛𝑅ℎ 2/3 𝑆1/2 [Éq. 2] 𝑂ù 𝑉 ∶ 𝑣𝑖𝑡𝑒𝑠𝑠𝑒 (𝑚 𝑠) 𝑛 ∶ 𝑐𝑜𝑒𝑓𝑓𝑖𝑐𝑖𝑒𝑛𝑡 𝑑𝑒 𝑟𝑢𝑔𝑜𝑠𝑖𝑡é 𝑑𝑒 𝑀𝑎𝑛𝑛𝑖𝑛𝑔 𝑅ℎ: 𝑟𝑎𝑦𝑜𝑛 ℎ𝑦𝑑𝑟𝑎𝑢𝑙𝑖𝑞𝑢𝑒 (𝑚) 𝑆: 𝑝𝑒𝑛𝑡𝑒 𝑑𝑢 𝑐𝑜𝑢𝑟𝑠 𝑑′𝑒𝑎𝑢(𝑚 𝑚) 𝑄 = 𝐴𝑡𝑉 [Éq. 3] 𝑂ù 𝑄 ∶ 𝑑é𝑏𝑖𝑡 (𝑚 3 𝑠 ) 𝐴𝑡 ∶ 𝑎𝑖𝑟𝑒 𝑑𝑒 𝑙𝑎 𝑠𝑒𝑐𝑡𝑖𝑜𝑛 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙𝑒 (𝑚2) 𝑉: 𝑣𝑖𝑡𝑒𝑠𝑠𝑒 (𝑚 𝑠) 𝑅ℎ= 𝐴 𝑃 [Éq. 4] 𝑂ù 𝑅ℎ: 𝑟𝑎𝑦𝑜𝑛 ℎ𝑦𝑑𝑟𝑎𝑢𝑙𝑖𝑞𝑢𝑒 (𝑚) 𝐴𝑡 ∶ 𝑎𝑖𝑟𝑒 𝑑𝑒 𝑙𝑎 𝑠𝑒𝑐𝑡𝑖𝑜𝑛 𝑡𝑟𝑎𝑛𝑠𝑣𝑒𝑟𝑠𝑎𝑙𝑒(𝑚2) 𝑃 ∶ 𝑝é𝑟𝑖𝑚è𝑡𝑟𝑒 𝑚𝑜𝑢𝑖𝑙𝑙é (𝑚)
Avec les équations 3 et 4, il est possible de transformer l’équation 2 pour qu’elle soit dépendante de l’aire (équation 5). Q =1 𝑛( 𝐴𝑡2 𝑃) 2/3𝑆1/2 [Éq. 5]
Avec la pente du cours d’eau, le profil de la section transversale et l’équation 5, il est possible de déterminer l’aire exacte par itération en ajustant la hauteur d’eau dans la section jusqu’à atteindre un débit équivalent à celui obtenu avec l’équation 1. Une fois cet équilibre obtenu, la vitesse correspondante est établie pour ce débit. Profil transversal
Un profil transversal (figure 2) d’un cours d’eau est l’équivalent d’une coupe perpendiculaire à l’écoulement. Ce profil révèle la forme du lit du cours d’eau. Cette coupe peut être uniforme ou varier sur la largeur et ce profil influence la vitesse d’écoulement en offrant plus ou moins de surface de contact selon la hauteur d’eau s’y trouvant. C’est aussi avec la hauteur d’eau que l’aire correspondant à l’écoulement est déterminé.
6
Figure 2 : Exemple d'un profil transversal (Lagacé, 2016) 1.2.1.4. Profil longitudinal et pente des cours d’eau
Le profil longitudinal (figure 3) est une visualisation graphique de l’élévation du fond du cours d’eau en suivant la ligne du talweg (endroit le plus profond). À partir de ce profil, il est possible d’extraire la pente du cours d’eau.
Figure 3 : Exemple de profil longitudinal (Lagacé, 2016)
1.2.2. Géomorphologie
Dans un contexte de gestion des cours d’eau, la géomorphologie apporte des éléments de réponse concernant la stabilité potentielle des cours d’eau dans le temps. La « stabilité » signifie le maintien du chenal sous sa forme actuelle, c’est-à-dire en l’absence d’érosion des berges et du lit, ainsi qu’en l’absence de dépôt de sédiments. Il est important de remarquer qu’une telle stabilité ne correspond pas à l’état naturel d’un cours d’eau dans la majorité des cas. Normalement il y a migration naturelle des méandres des cours d’eau. Cette migration est causée par l’érosion des berges du côté externe des méandres et des dépôts des sédiments du côté interne (figure 4). Cette migration du chenal a par ailleurs un rôle écologique important en permettant un maintien dynamique des habitats (Florsheim et al. 2008).
Malgré les aspects écologiques liés au dynamisme naturel des cours d’eau, la linéarisation des cours d’eau en milieu agricole et la mise en place de système de drainage des cultures imposent souvent un besoin de maintenir le chenal dans un état statique, sans érosion ni dépôt de sédiments. Cette stabilité géomorphologique peut être testée de trois manières différentes : par la technique de la vitesse maximale admissible, par le calcul de la
7
puissance spécifique en utilisant des valeurs seuils, ou bien par le calcul de la puissance spécifique en utilisant la variation de cette puissance.
Figure 4 : Migration typique de méandres observée par positionnement du chenal sur plusieurs années (Piégay et al. 2005). 1.2.2.1. Vitesse maximale admissible
Le manuel de conception des chenaux du United States Department of Agriculture (USDA, 2007) fournit plusieurs techniques pour dimensionner un chenal artificiel de façon à en assurer la stabilité. Ces techniques peuvent être utilisées pour tester la stabilité d’un cours d’eau de dimensions existantes ou projetées. La technique de la vitesse maximale admissible y apparaît comme la plus adaptée pour les cours d’eau en milieu agricole. Cette technique consiste à calculer la vitesse moyenne d’écoulement au-delà de laquelle le chenal réajuste sa forme, soit la vitesse maximale admissible. Cette vitesse maximale admissible peut être comparée à la vitesse moyenne d’écoulement pour un débit d’une récurrence donnée (récurrence de conception). Si la vitesse moyenne d’écoulement de l’eau est supérieure à la vitesse maximale admissible, les berges du chenal sont alors susceptibles de s’éroder. Pour déterminer la vitesse maximale admissible, plusieurs méthodes existent et les données requises varient selon la méthode utilisée. L’une de ces méthodes consiste à se baser sur des tables de références présentant les limites des vitesses maximales selon le type de matériau qui constitut le canal à l’étude. Une telle table a été produite en 1926 et elle fût basée sur un questionnaire qui a été répondu par des ingénieurs en irrigation (Fortier et Scobey, 1926). En 1991, une seconde table avec des critères similaires a été produite par l’USDA (NRCS, 2008).
8 Puissance spécifique
La puissance est l’énergie que possède le cours d’eau. La puissance n’est pas uniforme sur toute la longueur du cours d’eau puisque c’est une caractéristique géomorphologique de celui-ci. Selon la quantité d’énergie disponible, les sédiments peuvent soit se déposer dans le cas d’un manque d’énergie, soit poursuivre leur chemin si cela leur est possible ou de nouvelles particules peuvent être arrachées des talus ou du fond du cours d’eau. Bagnold (1966) définit les concepts de puissance totale (équation 6) (Ω, en W/m) et de puissance spécifique (équation 7) (𝜔, en W/m2) comme suit :
Ω = 𝜌𝑔𝑄𝑏𝑓𝑆𝑏 [Éq. 6] 𝜔 = 𝜏0𝑉 = Ω 𝑊⁄ [Éq. 7] 𝑂ù 𝜏0∶ 𝐶𝑜𝑛𝑡𝑟𝑎𝑖𝑛𝑡𝑒 𝑑𝑒 𝑐𝑖𝑠𝑎𝑖𝑙𝑙𝑒𝑚𝑒𝑛𝑡 ( 𝑁 𝑚2) 𝑉 ∶ 𝑉𝑖𝑡𝑒𝑠𝑠𝑒 𝑚𝑜𝑦𝑒𝑛𝑛𝑒 (𝑚 𝑠) 𝜌 ∶ 𝐷𝑒𝑛𝑠𝑖𝑡é 𝑑𝑒 𝑙’𝑒𝑎𝑢 (𝑘𝑔 𝑚3) 𝑔 ∶ 𝐴𝑐𝑐é𝑙é𝑟𝑎𝑡𝑖𝑜𝑛 𝑔𝑟𝑎𝑣𝑖𝑡𝑎𝑡𝑖𝑜𝑛𝑛𝑒𝑙𝑙𝑒 (𝑚 𝑠2) 𝑄𝑏𝑓 ∶ 𝐷é𝑏𝑖𝑡 𝑝𝑙𝑒𝑖𝑛 𝑏𝑜𝑟𝑑 ( 𝑚3 𝑠 ) 𝑊 ∶ 𝐿𝑎𝑟𝑔𝑒𝑢𝑟 𝑝𝑙𝑒𝑖𝑛 𝑏𝑜𝑟𝑑 (𝑚) 𝑆𝑏 ∶ 𝑃𝑒𝑛𝑡𝑒 𝑑𝑢 𝑙𝑖𝑡 ( 𝑚 𝑚)
Des valeurs seuils de puissance spécifique ont été définies empiriquement, notamment par Brookes (1988, 1990), pour déterminer le comportement d’un cours d’eau, en termes d’érosion ou de dépôt de sédiments. Au Québec, les travaux de Guillou (2012) ont confirmé la validité de ces résultats en milieu agricole, avec des signes d’érosion et de création d’un méandre pour des cours d’eau ayant une puissance spécifique supérieure à 25 W/m2, et une sédimentation pour les cours d’eau ayant une puissance spécifique inférieure à 7 W/m2.
1.3. Géomatique
Cette section présente les éléments reliés aux outils géomatiques. Elle débute en présentant les formats de données disponibles, pour ensuite présenter les logiciels qui peuvent les traiter. Par la suite, les outils géomatiques sont abordés, pour s’attarder aux algorithmes utiles en hydrologie et une méthode de traitement. La section se termine avec le langage de programmation que les outils utilisent.
1.3.1. Formats de données
Les informations pouvant décrire un territoire tel que la population, l’occupation du sol, la pédologie et la topographie peuvent être représentées sous forme vectorielle, matricielle (raster) ou LiDAR. Cette section
9
présente ces formats et les outils qui permettent de les traiter, ainsi que les algorithmes reliés à l’hydrologie qui sont utilisés par ces outils, le langage de programmation qu’ils utilisent et les méthodes de traitements les exploitants.
1.3.1.1. Vectoriel
Le vectoriel est un format de données permettant de représenter l’information dans les outils SIG. Ce modèle dispose principalement d’informations ponctuelles de localisation x, y et z correspondant à un système de coordonnées (UTM, MTM, etc.). De ces points qui sont les éléments de base, des liens peuvent être produits afin de former des relations et ainsi obtenir des lignes, des « polylignes » et des polygones (figure 5). Ces éléments peuvent représenter des objets comme des limites de bassin versant, le parcours de cours d’eau ou une zone pédologique. Pour ce faire, certaines règles concernant la topologie doivent être respectées :
- Les limites ne devraient pas se croiser. Seules les lignes correspondantes, par exemple, à des ponts traversant une rivière peuvent se croiser;
- Les lignes et les limites partagent des nœuds seulement si leur extrémité respective est la même; - Une aire commune ne devrait pas être présente plus d’une fois;
- Une aire doit absolument être fermée;
- Il est recommandé que les aires et les éléments linéaires soient placés dans des couches séparées.
Figure 5 : Exemple de points, lignes et surfaces définis en format vectoriel (Geospatial Innovation Facility, n.d.)
Avec ces éléments, une représentation d’un milieu peut être produite, fournissant des informations supplémentaires d’une topologie. Par exemple, un réseau routier peut être présenté avec des intersections (points), des arcs (lignes), des polygones et des étiquettes qui permettent d’associer des informations supplémentaires, offrant ainsi une représentation précise d’un réseau routier. De plus, chaque objet peut avoir une liste d’attributs correspondant à des caractères des objets comme le type de sol, la série de sols ou le type de recouvrement dans le cas d’une carte.
10
L’avantage de ce format est que les données disposent d’une bonne représentation des mesures puisqu’elles ne sont que des valeurs, ce n’est donc que la précision de la valeur recueillie qui affecte la mesure. De plus, les données sont compactes et la topologie peut être complètement décrite par ce format. Cependant, la structure est complexe et les polygones séparés sur plusieurs couches superposées peuvent amener des difficultés de traitements. Aussi les simulations sont difficiles puisque les unités possèdent différentes formes topologiques. 1.3.1.2. Raster
À son état le plus simple, un raster est une matrice de cellules (pixels) organisées en rangées et colonnes où chaque cellule dispose d’informations propres à sa localisation. Ces pixels peuvent avoir des dimensions aussi grandes ou petites que nécessaire pour représenter la surface et véhiculer ces informations. Cependant, la taille des pixels détermine la taille et la finesse des motifs et des fonctionnalités du raster. Plus ceux-ci sont petits, plus le raster sera lisse et précis et plus ceux-ci sont grands, plus il risque d’y avoir une perte d’informations et de détails (figure 6). Aussi, la taille des pixels détermine le niveau de détail et l’espace de stockage nécessaires pour la carte. Plus précis est celui-ci, plus l’espace de stockage exigé est important.
Figure 6 : Représentation de la taille des cellules et résolutions de l’information dans un raster (ESRI, 2008)
Le positionnement de chaque cellule est défini par la ligne et la colonne où elle se trouve dans la matrice. Les rangées correspondent aux coordonnées cartésiennes en x et les colonnes à l’axe y.
Les rasters sont des représentations numériques de phénomènes réels qui peuvent être thématiques. Les données thématiques représentent les caractéristiques, des données fixes, telles que les données sur les sols. Il est à préciser que les pixels peuvent représenter des informations continues ou des images. Les données continues sont les températures, les élévations ou encore des images satellites contenant des données spectrales (données qui peuvent varier dans le temps) et les images sont les cartes scannées ou des photos de construction (données externes reliées à secteur géographique).
Les données thématiques et continues peuvent être affichées sous forme de couche avec d’autres données géographiques, mais sont habituellement utilisées comme données sources.
11
La structure des cartes raster est simple et cette caractéristique permet de les utiliser dans de nombreuses applications. Les données raster sont divisées sous quatre classes principales dans les SIG :
- La première classe est l’arrière-plan. Trois sources principales sont utilisées comme base : les orthophotos (photos rectifiées géométriquement et égalisées radiométriquement) provenant de la photo aérienne, l’imagerie satellite et les cartes balayées.
- La seconde classe est la carte de surface. Cette classe fournit une méthode efficace de stocker les données continues (température, densité de population, élévation) en tant que surface en plus d’offrir une représentation régulièrement espacée des surfaces.
- La troisième classe est la carte thématique qui sous-divise en catégories la couverture terrestre (végétation, plaines, sol, etc.) et attribue une valeur à cette catégorie. Cette classe peut être le résultat d’un traitement de données.
- La quatrième classe est l’attribut d’une fonctionnalité. Cette classe inclut tous les éléments externes qui peuvent être liés à un objet géographique (photos numériques, documents numérisés, documents juridiques identifiant une transaction, etc.).
Avec ces informations, des liens peuvent exister entre les cellules, permettant ainsi de produire des éléments ponctuels (bâtiments, station météo, etc.), des lignes (réseau hydrographique, réseau routier, etc.) et des surfaces (zone forestière, zone humide, milieu urbain, etc.) (figure 7).
Figure 7 : Exemple de points, lignes et surfaces définis en format raster (Geospatial Innovation Facility, n.d.)
L’utilisation de raster présente de nombreux avantages. En effet, ce type de carte dispose d’une structure simple des données, ce qui permet de représenter des surfaces continues et d’effectuer des analyses de surface. Il est aussi possible de stocker uniformément des points, des lignes, des polygones et des surfaces en plus d’effectuer
12
des superpositions rapides de données. C’est aussi un format puissant pour l’analyse spatiale et les statistiques avancées.
Un désavantage de ce format est la résolution. L’utilisation de grandes cellules mène à une perte d’information reliée à chaque pixel puisque la superficie correspondante est plus importante. Cela est équivalent à effectuer une moyenne de l’information de plusieurs pixels plus petits.
1.3.1.3. Format vectoriel – shapefiles
Un « shapefile » (.shp) est un format populaire de données vectorielles géospatiales (points, lignes et régions) qui a été développé et est régulé par l’« Environmental Systems Research Institute » (ESRI). Ce format garde en mémoire des informations géométriques et des attributs pour des données à caractéristiques spatiales. La géométrie est stockée en tant que forme comprenant des coordonnées vectorielles.
Le terme « shapefile » ne fait référence qu’au fichier .shp qui n’est pas fonctionnel seul. Le « shapefile » est constitué au minimum d’un fichier principal (.shp), d’un fichier index (.shx) et d’une table dBASE. Le fichier principal est un fichier d'accès direct, qui dispose des formes enregistrées et d’une liste de sommets correspondant à ces formes. L’index contient le décalage de l’enregistrement par rapport au début du fichier principal. Les attributs contenus dans la table correspondent à un seul élément du fichier principal et sont ordonnés pour suivre le même ordre.
En plus de ces trois formats nécessaires au fonctionnement, il est possible de les accompagner d’extensions qui sont optionnelles : « projection format » (.prj), « spatial index » (.sbn et .sbx), « spatial index » pour les « shapefiles » (.fbn et .fbx), « attribute index » (.ain et .aih), « geocoding index » pour écrire-lire les « shapefiles » (.ixs et .mxs pour le format ODB), « metadata » en format XML (.shp.xml) et pour identifier les caractères encodés à utiliser (.cpg).
Puisqu’ils n’ont pas besoin de traitement par rapport à la structure des données topologiques, les « shapefiles » ont l’avantage d’être rapides lors de la préparation et l’affichage des données. Ils nécessitent aussi moins d’espace de stockage en plus d’être faciles à lire et écrire avec les outils SIG.
Malgré leur avantage de rapidité et de faible espace de stockage, ce type de fichier comprend quelques désavantages. Il ne dispose pas de la capacité de stocker les informations topologiques et la taille que peut atteindre les fichiers .shp et « .dbf » est limitée à 2GB, ce qui représente un maximum d’environ 70 millions de points. De plus, le « shapefile » n’est pas en mesure de mélanger le type de forme qu’il enregistre, c’est-à-dire que par exemple, les polylignes et les polygones ne peuvent se retrouver dans un même fichier, produisant un minimum de trois fichiers (points, lignes et polygones).
13 1.3.1.4. LiDAR
Le LiDAR, pour « light detection and ranging » (laser de télédétection), est une technique de détection par laser qui permet de déterminer la distance entre la source émettrice du signal et le point de réflexion avec un laser d’une puissance de l’ordre du micromètre (1064 nm) (Emilie, 2013).
Son fonctionnement consiste en un signal envoyé par l’appareil qui se divise lorsqu’il touche un objet. Une partie de ce signal est absorbée par le milieu, une autre renvoyée par réflexion à la source. Selon la surface que le laser a touchée, l’intensité, la fréquence et la phase du signal lumineux en reviennent modifiées (Populus, 2002). Le relevé LiDAR aéroporté ne peut produire une densité de points aussi importante que s’il était installé au sol, mais il peut tout de même produire un fini précis pouvant aller de 1 à 10 points au mètre carré. Il est possible d’observer la résolution une fois les points introduits dans un logiciel comme ArcScene, un logiciel de la suite ArcGIS permettant la visualisation des données LiDAR (figure 8). L’avantage de cette méthode est qu’elle permet d’effectuer la prise de données sur un vaste territoire en peu de temps. De plus, même si l’appareil se situe à plus de 300 m au-dessus du lieu d’analyse, la précision est de 10 cm sur les axes des x, y et z (Simmers et al., 2014) et avec une géolocalisation par satellite de l’appareil, la précision peut être de 4 à 5 cm, lorsque couplée avec une station de géolocalisation se situant au sol.
14
Tableau 1 : Classification des points LiDAR dans un fichier LAS
Valeur de classification (bits de 0 à 4) Signification
0 Jamais classé 1 Non attribué 2 Sol 3 Végétation basse 4 Végétation moyenne 5 Végétation haute 6 Bâtiment 7 Bruit 8 Clé de modèle 9 Eau
10 Réservé à la définition ASPRS
11 Réservé à la définition ASPRS
12 Superposition
13–31 Réservé à la définition ASPRS
Les relevés LiDAR nécessitent un traitement pour procéder à une classification des points. Cette classification se fait avec un code numérique qui a été défini par l’« American Society for Photogrammetry and Remote Sensing » (ASPRS). Le tableau 1 présente toute la classification (ArcGIS, 2013). Sauf si des traitements supplémentaires sont effectués, les classes obtenues sont limitées à la différenciation du sol et de la végétation. Les classes 0 et 1 représentent les points se retrouvant à l’intérieur ou à l’extérieur du secteur demandé par le client. Ces points représentent tous les éléments pouvant avoir été captés, tels que la végétation haute, la végétation intermédiaire, le sol et la surface de l’eau. Ces points constituent une suite de données se situant dans une zone grise ou simplement exclue des classes désirées, donc non classifiées.
Les classes 2 et 8 sont des points au sol. La classe 8 est constituée de points clés qui sont considérés comme étant représentatifs de la majorité et permettent d’alléger la quantité de données tout en conservant une précision adéquate pour élaborer une image. Selon la topographie, une concentration plus ou moins grande de points est utilisée dans cette classe. La classe 2 est constituée de tous les points qui ne se retrouvent dans la classe 8.
Le relevé LiDAR est un outil géomatique permettant d’obtenir des représentations précises des lieux en peu de temps et à faible coût (Jones et al., 2007). En 2002, Charlton et ses collaborateurs (Charlton, M. E. et al., 2003) ont comparé des relevés terrain avec des relevés LiDAR pour vérifier l’exactitude de ceux-ci. Le LiDAR s’est révélé comparable aux données terrain.
15
Le relevé LiDAR est depuis quelques décennies de plus en plus utilisé dans le domaine fluvial, en permettant de déterminer les pentes des berges, le parcours des rivières et bien plus (Hohenthal et al., 2011). Par exemple, Fulford (2004) a élaboré une gradation des risques d’inondation des plaines inondables grâce aux relevés LiDAR et les outils SIG. Cet outil a bien évolué et David et al. (2012) ont évalué l’utilité du LiDAR pour l’analyse de rivières à lit de gravier, soulignant la capacité d’obtenir des données sur une grande distance rapidement avec une précision acceptable et la capacité d’obtenir la bathymétrie de la rivière (Milan et al., 2012).
Actuellement, le gouvernement du Québec effectue des relevés LiDAR aéroportés sur l’ensemble du territoire québécois (Géoboutique Québec, 2017).
1.3.1.5. Modèle numérique de terrain (MNT)
Deux types de cartes contenant des données d’élévation existent : les modèles numériques d’élévation (MNE) (ou plus fréquemment appelé par son appellation anglophone « Digital Elevation Model » (DEM)) et les modèles numériques de surface (MNS) (« Digital Surface Model » (DSM)).
Le MNE se réfère à la représentation d’une sous-classe des données brutes. C’est-à-dire tout ce qui est sol (terre nue), donc excluant les sections caractérisées comme étant des bâtiments, des ponts, de la végétation, etc. Cette ségrégation est habituellement obtenue à la suite d’un traitement des données. Le MNS pour sa part inclut tous ces éléments, permettant ainsi d’avoir une bonne vision globale en modélisant le paysage et les villes. Bien qu’il soit préférable d’avoir un support visuel, la majorité des outils de modélisations nécessitent le MNE pour évaluer les zones inondables, trouver le réseau de drainage, faire des études d’utilisation du sol, effectuer de la gestion. La figure 9 présente bien la différence entre les deux types de modèles.
Figure 9 : Comparaison entre un modèle numérique de surface (MNE) et un modèle numérique de surface (MNS) (Wiki GIS, 2013)
Les MNE sont représentés sous forme de raster, réseau d’éléments triangulaires (TIN – Triangulated Irregular Network) ou courbe de niveau par un raster. Ceux-ci sont utilisés dans les systèmes d’information
16
géographiques (SIG) et constituent la base de nombreux types de cartes élaborés dans de nombreux domaines (Awda, 2018).
La surface du territoire que le MNE décrit comprend deux éléments : les éléments aléatoires et les éléments systématiques. L’élément aléatoire (stochastique) représente les surfaces continues qui ne permettent pas de représenter une forme fixe sauf dans le cas d’une présence d’un nombre de points infinis. Cette partie est habituellement décrite avec un réseau de points plus léger à traiter, laissant place à des triangles en pente ou des quadrants réguliers.
L’élément systématique représente toutes les variations plus définies, comme des fissures pointues, le haut et le bas d’une coupe de route, etc. Ces éléments sont faciles à caractériser verbalement (exemple : falaise ou pente lisse) et à représenter avec la géométrie de base qui est constituée de points, lignes et zones.
L’agglomération de toutes les données ne reste qu’une approximation de la réalité puisque la modélisation dépend de la densité des données prises et des algorithmes les traitant. Par exemple, il est possible de produire un MNE avec des points LiDAR d’une résolution (taille de pixels) désirée.
L’obtention des données de MNE peut être non efficiente avec certaines techniques. Par exemple, l’arpentage est particulièrement pratique pour avoir des points clés de références ou avoir un aperçu grossier d’un territoire local, mais exigeant pour l’obtention d’un MNE précis. Cependant, il existe aussi des techniques qui permettent d’obtenir des données plus denses, sur un territoire plus vaste et à coût raisonnable tel que le relevé LiDAR et la stéréo photogrammétrie. D’autres outils et techniques existent, mais ce sont principalement ces deux derniers qui sont utilisées.
Les MNE sont des sources d’informations dont les modélisations sont partiellement ou entièrement dépendantes, d’où l’importance de valider les données. Plus cette source est précise, plus les résultats s’y reliant seront de qualité. Lors de la création d’un MNE, deux types d’erreurs peuvent se glisser. L’une est sur la position cartographique qui implique que la localisation géographique est erronée sur la dimension et la trajectoire des contours. Cela affecte seulement les modèles vectoriels. La seconde est sur l’attribut (thématique), indiquant que les valeurs, comme l’altitude et les populations, sont mal assignées. Cette erreur peut affecter les modèles vectoriels, mais particulièrement les rasters car les valeurs d'altitude sont généralement attribuées par des méthodes d'interpolation qui provoquent également des erreurs de plusieurs facteurs.
La qualité d’un MNE dépend de la précision de l’élévation qui est reliée à chaque pixel (précision absolue) et de la précision de la morphologie (précision relative). La qualité de tout ce qui est produit de cette carte peut être affectée par différents facteurs tels que la rugosité du terrain, la densité d’échantillonnage, la résolution de la
17
grille (taille des pixels), l’algorithme d’interpolation, l’algorithme d’analyse de terrain et la résolution verticale. Même si ces facteurs influencent le résultat découlant de l’utilisation d’un MNE, il est seulement possible de réduire l’erreur en ayant des données initiales les plus complètes et précises possible.
1.3.2. Logiciels hydrologiques
Dans le domaine hydrologique, quelques logiciels ont été développés pour procéder au traitement de données et produire des données sur les cours d’eau.
L’un d’entre eux est HEC-RAS (« Hydrologic Engineering Center's River Analysis System ») développé par « The US Army Corps of Engineers » (2017) qui permet de faire des calculs de débits constants ou variables, ainsi que des calculs de sédimentation. Ce logiciel est un développement indépendant et ne peut être utilisé comme base pour procéder au développement d’un autre outil puisque les codes sources sont non disponibles. Un autre outil est Hydrotel. Cet outil permet d’effectuer l’analyse de bassins versants pour mieux prendre en compte les variabilités spatiales des caractéristiques physiographiques de celui-ci (topographie, occupation du sol, type de sol, etc.) et des systèmes météorologiques qui l’affectent (Hydrotel, 2000). Son fonctionnement est dépendant du logiciel Physitel qui lui fournit une carte comportant des données topographiques sous un format non précisé. De plus, le programme est peu documenté et le code source est non disponible, ce qui limite le développement potentiel d’application.
1.3.2.1. Système d’Information Géomatique (SIG)
Les Systèmes d’Information Géomatiques sont des logiciels polyvalents qui offrent une capacité de gestion de la donnée spatiale dans de nombreux domaines en disposant d’outils spécialisés. Entre autres, pour la modélisation hydrologique, de nombreux outils ont été développés (Molina et al., 2014).
De nombreux outils géomatiques existent pour effectuer l’analyse et le traitement de données cartographiques. Pour n’en nommer que quelques-uns, il y a : ArcGIS (ESRI, 2018), QGIS (QGIS, 2018), GRASS GIS (GRASS, 2018) et SAGA GIS (Conrad et al., 2015). Certains sont commerciaux, d’autres sont « Open Source », ce qui permet une utilisation gratuite. De plus, avec les logiciels « Open Source », il est possible d’utiliser les codes sources déjà existants et les réutiliser ou les modifier. Cette ouverture de la part des groupes responsables de ces logiciels face aux changements du programme permet à ceux-ci d’évoluer, de le maintenir à jour avec notamment l’ajout de nouveaux outils et de rester comparables ou même supérieurs en termes de performance aux logiciels propriétaires. Ce type de logiciel est alors un excellent moyen pour les échanges et développements dans le domaine de la recherche puisque tout est disponible et qu’il y a un partage de connaissances en continu par la simple application ou amélioration des codes sources. Par exemple, GRASS
18
(GRASS, 2018) est un SIG « Open Source » qui, au fil des années, a été amélioré et dont des contributeurs externes ont aidé à développer des outils dédiés à des domaines précis.
1.3.3. Algorithmes pour déterminer le réseau hydrographique
La majorité des algorithmes disponibles pour extraire le réseau hydrographique utilisent les modèles numériques d’élévation (MNE) pour extraire les différents paramètres hydrologiques: direction de l’écoulement, réseau hydrographique et sous-bassins versants correspondants (Turcotte, 2013). Cette section présente les trois principaux algorithmes utilisés pour extraire le réseau hydrographique à partir d’un MNE et l’algorithme AT.
1.3.3.1. D8 – SingleFlow Direction (SFD)
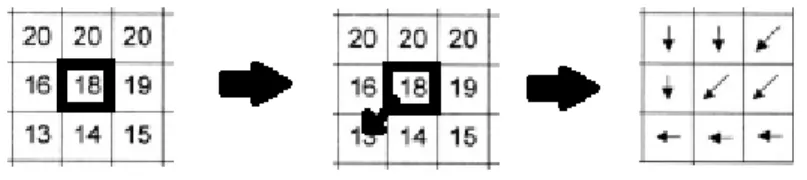
L’approche traditionnelle pour déterminer la direction de l’écoulement à partir d’une matrice consiste à utiliser l’algorithme D8. Le D8 (figure 10) sélectionne une direction entre huit options jusqu’à atteindre des points stagnants ou le point le plus bas de la zone d’analyse. Plus précisément, la base de la sélection de la direction est basée sur une matrice disposant des élévations de la zone à l’étude (MNE), ce qui impose que chaque case soit entourée de huit autres cases. À partir d’un point, huit directions sont donc possibles et celle sélectionnée est la plus accentuée de celles l’entourant. La figure 10 présente le procédé de sélection du parcours hydrologique de l’algorithme D8.
Figure 10: Visualisation de procédure pour définir la direction d’écoulement avec l’algorithme D8 (Cooper, 2013)
Le D8 permet d’effectuer un lien cohérent entre la direction d’écoulement, le parcours des rivières et des lacs qui est associé au parcours de l’eau. Pour arriver au résultat désiré, il est nécessaire de passer par quatre étapes (figure 11). À la première étape, la matrice d’élévation est analysée pour produire une couche des directions d’écoulement en sélectionnant la pente la plus abrupte. Cependant, il lui est impossible de déterminer la direction d’écoulement s’il y a présence de cellules disposant toutes de la même altitude, un critère arbitraire est alors utilisé pour déterminer la direction. Le processus est réitéré si le critère ne mène nulle part. La deuxième étape permet de déterminer les bassins versants et de lier la sortie de l’écoulement à celui-ci. La troisième étape consiste à remonter le parcours d’écoulement à partir de l’exutoire pour modéliser la rivière et les lacs. Finalement, la quatrième étape sert à délimiter les sous-bassins versants pour chaque branche de rivière en sélectionnant toutes les cellules se concentrant au même point de sortie.
Toutefois, malgré le bon fonctionnement de l’algorithme, ce dernier n’est pas parfait. La détermination de la direction avec seulement huit directions possibles limite la détermination du réseau et peut poser un problème
19
sur la continuité de l’écoulement. De plus, l’angle d’une courbe est limité par le manque de direction possible menant à une discrétisation qui résulte en une perte d’information du parcours réel. Ce problème est principalement généré par la résolution verticale et horizontale du MNE. Parfois aussi, dû à cette résolution, il y a possibilité d’une absence de section de rivière et de présence de parcours non existant ou parallèle à celui existant. (Turcotte, 2001)
Figure 11 : Étapes de modélisation d'un cours d'eau à l’aide de l'algorithme D8 (Turcotte, 2001)
De plus, il est difficile de déterminer le sens de l’écoulement pour les surfaces planes telles que les plaines et de différencier entre les plaines et les lacs. Cependant, Jones et al. (2007) ont prouvé qu’il était possible de déterminer le parcours hydrologique de ces surfaces en réduisant les facettes des polygones originalement obtenus. Le résultat est pratique pour raffiner la détermination des nœuds et le réseau du système hydrographique (Jones et al., 2012).
1.3.3.2. Digital River and Lake Network (DRLN)
Le DRLN (Turcotte, 2001) se base sur une carte vectorielle existant du réseau hydrologique que l’algorithme convertit en raster et utilise avec l’algorithme D8 pour ajuster les parcours. Les ajustements consistent à linéariser les courbes serrées telles que de petits méandres et identifier les sections pouvant être un lac. Les méandres sont touchés car leur parcours peut être peu défini et être problématique lors de la définition du parcours d’écoulement final. Les sections à pente très faible se séparant en deux pour se rejoindre un peu plus loin sont quant à elles considérées comme des lacs, ce qui rend le sens d’écoulement un peu plus cohérent et permet d’identifier les étendues d’eau non considérées avec d’autres algorithmes dans les zones planes. Lorsque l’ajustement du réseau est terminé, il est superposé avec le résultat de l’algorithme D8. En se basant sur le DRLN, le parcours du D8 est modifié pour que le sens de l’écoulement défini soit redirigé vers le parcours du DRLN qui est considéré comme dominant. Cet algorithme permet ainsi de mieux définir le réseau
20
hydrographique. La figure 12 présente les étapes de l’utilisation du DRLN et la figure 13 est un exemple d’ajustement de l’écoulement avec le DRLN et le D8.
Figure 12: Exemple de conversion d’un DRLN à partir d’un format vectoriel à un format matriciel (raster) : A) Trajet vectoriel initial B) Ajout de points au réseau vectoriel C) Conversion des points vectoriels en coordonnées de rangées et colonnes D) Élimination des cas problématiques i) Cellules qui nécessitent deux directions ii) confluent artificiel iii) répétitions de confluents E) Remplissage des lacs F) Assignation de la valeur zéro aux cellules non incluses dans le parcours (Turcotte, 2001).
21
Figure 13 : Exemple de divergence générée par un ajustement unique de la direction d'écoulement des cellules chevauché par le DRLN : A) Cas initial B) Parcours et direction d’écoulement obtenue par le D8 C) exemple de divergence dans la direction D) exemple d’écoulement attendu suite à l’utilisation de l’approche proposée (les flèches blanches représentent la direction d’écoulement modifié après avoir utilisé le DRLN) (Turcotte, 2001).
1.3.3.3. Multiflow Direction (MFD)
Le « Multi Flow Direction » (Cooper, 2013) est très semblable à l’algorithme de base D8, « Single Flow Direction ». Il utilise la pente pour déterminer le parcours de l’eau et dirige l’écoulement vers les cellules plus basses. Tel que présenté à la figure 14, la seule différence est que le MFD distribue l’écoulement sur plusieurs cases selon un ratio défini par la pente. Ce ratio est déterminé avec l’équation 8.
𝑓𝑖 = max(0,𝑆𝑖𝑃) ∑8𝑗=1max(0,𝑆𝑗𝑃) , 𝑗 𝑖𝑛𝑐𝑙𝑢𝑠 𝑖 [Équ. 8] 𝑂ù 𝑓𝑖 ∶ 𝐹𝑟𝑎𝑐𝑡𝑖𝑜𝑛 𝑑𝑒 𝑙’é𝑐𝑜𝑢𝑙𝑒𝑚𝑒𝑛𝑡 𝑑𝑖𝑟𝑖𝑔é à 𝑙𝑎 𝑐𝑒𝑙𝑙𝑢𝑙𝑒 𝑖, 𝑗 ∶ 𝑇𝑜𝑡𝑎𝑙 𝑑𝑒𝑠 𝑑𝑖𝑟𝑒𝑐𝑡𝑖𝑜𝑛𝑠 𝑝𝑜𝑠𝑠𝑖𝑏𝑙𝑒𝑠 𝑆 ∶ 𝑃𝑒𝑛𝑡𝑒 (𝑚 𝑚) 𝑃 ∶ 𝑃𝑜𝑖𝑑𝑠
22
Figure 14: Comparaison des méthodes de définition des parcours d’écoulement avec deux algorithmes : a) Single Flow Direction b) Multiple Flow Direction (Cooper, 2013)
Avec cette méthode, l’écoulement n’est pas limité à une seule direction et permet ainsi d’inclure d’autres parcours secondaires.
1.3.3.4. Algorithme AT
L’algorithme AT est une méthode qui permet d’accélérer le calcul d’équations linéaires. Lorsqu’une matrice A
est symétrique en diagonale dominante (SDD), il est possible de résoudre les problèmes linéaires dans un temps correspondant presque à une tendance linéaire en réduisant le temps de recherche. Ce type d’algorithme a trouvé sa place dans le milieu informatique, permettant de développer des systèmes rapides pour modéliser entre autres des éléments naturels de systèmes physiques comme les réseaux hydrographiques (Kelner et al., 2013).
Cet algorithme fait maintenant partie intégrante des algorithmes « Single Flow Direction (D8 - SFD) » et « Multiple Flow Direction » (MFD) de GRASS GIS qui permettent de déterminer le réseau hydrographique des bassins versants.
L’extraction des paramètres hydrographiques à partir des MNE n’est pas parfaite et dispose de deux problèmes principaux. Le premier est la précision des réseaux hydrographique. La précision des informations disponibles impacte directement sur la qualité du parcours d’écoulement obtenu. Le deuxième problème est que les informations des zones planes sont difficilement dissociées pour identifier les lacs et les plaines. Cet élément est important pour déterminer l’écoulement des cours d’eau dans un lac ou une plaine puisqu’ils ne disposent pas d’une variation d’élévation importante laissant la définition du parcours d’écoulement difficile.
1.3.3.5. Profils transversaux
Mis à part les algorithmes permettant la définition du réseau hydrographique sur un secteur défini, peu de méthodologies sont répertoriées avec les SIG dans le domaine de l’hydrologie. Roelens et al. (2016) a présenté une méthode qui permet l’extraction de profils transversaux à partir de points LiDAR. Le long d’un cours d’eau, des lignes transversales sont positionnées et une zone tampon est tracée autour de celles-ci. L’ensemble des
23
points LiDAR situés dans cette zone sont alors projetés orthogonalement sur la ligne transversale. La position relative à la ligne est par la suite utilisée pour procéder à la visualisation du profil transversal.
Un élément qui peut devenir problématique à son application est que les relevés LiDAR utilisés par l’équipe de Roelens sont de haute densité (16 pts/m2) tandis que ceux disponibles sur l’ensemble du Québec sont de faibles
densités (1 pt/m2). Il sera nécessaire de vérifier la méthodologie avec les données de faible densité.
1.3.4. Langage de programmation et SIG
La création de programmes informatiques peut s’effectuer avec de nombreux langages informatiques (Java, JavaScript, C/C++, Python, R, S, Matlab, etc.), tous présentant leurs avantages et inconvénients. Chacun des langages dispose de particularités d’écriture par leur structure, leur alphabet et leurs variables, en plus d’utiliser un interpréteur pour procéder à la lecture des scripts en les compilant ou en les interprétant.
Les logiciels de SIG utilisent des scripts pour pouvoir définir des applications particulières, adapter certains outils ou créer des séries de traitements. Les SIG GRASS (GRASS, 2018), QGIS (QGIS, 2018) et ArcGIS (ESRI, 2018) utilisent le langage Python pour le développement de leurs scripts.
Python (Python, 2018) a été créé en 1991 et depuis de nombreux développements ont été réalisés. De nombreux outils ont été développés, lui permettant de concurrencer du point de vue de la performance avec les autres langages populaires tels que C/C++ et Java. Certains ajouts ont même permis d’accélérer les temps de traitement en allant chercher les avantages de certains autres langages. Par exemple, pour le traitement de données, des sections de la programmation peuvent être converties en C ou C++ qui est plus puissant pour ce type de tâche.
1.3.4.1. Librairies Python
Les librairies Python sont des compléments qui ont été développés par des tierces parties et qui permettent d’augmenter les fonctionnalités du langage. La simple installation d’une des librairies permet ainsi de simplifier le travail de programmation. Python dispose d’une vaste bibliothèque de ces librairies ainsi que la documentation correspondante. Les librairies d’intérêts sont Numpy, Scipy et Matplotlib.
La librairie Numpy (Numpy, 2017) contient des fonctions sophistiquées, des outils pour le calcul numérique, le traitement de tableaux N-dimensionnel et l’algèbre linéaire nécessaire pour les transformations de Fourier. Ces composantes font de NumPy un incontournable pour l’informatique scientifique. L’avantage principal de la librairie est sa capacité à produire une structure multidimensionnelle incorporant des données aléatoires dans des limites définies.
24
La librairie SciPy (Scipy, 2017) est une extension de la librairie NumPy et est un regroupement d’algorithmes mathématiques et de fonctions qui fournit des fonctions et des classes permettant de manipuler et de visualiser des données. L’interactivité d’une session Python peut alors être comparable à MATLAB, IDL, Octave, R-Lab et SciLab. Contrairement aux outils énumérés, l’avantage d’utiliser SciPy est qu’il permet de développer des programmes sous le langage Python et de les inclure dans le traitement avec les SIG.
Matplotlib (Matplotlib, 2017) est une librairie qui permet la création graphique et utilise NumPy pour fournir de bonnes performances afin d’offrir les mêmes fonctionnalités que MATLAB, tout en étant indépendant de MATLAB. Un avantage de Matplotlib est qu’il est orienté objet, ce qui permet d’augmenter les possibilités d’appliquer des fonctions complexes tout en simplifiant le procédé. Le code de la librairie est constitué de trois parties. La première est l’interface pylab qui regroupe l’ensemble des fonctions qui permet à l’utilisateur de produire des figures avec un code semblable à MATLAB. La deuxième est l’interface Matplotlib qui est constituée de toutes les classes qui effectuent la création et la gestion des figures, textes, lignes, etc. Elle correspond au traitement intermédiaire. La troisième partie constitue le résultat avec des fonctions permettant de transformer la représentation en copie papier ou périphérique d’affichage.
1.4. Modules
Les modules ici présentés sont l’origine du projet AgriEAU. Ils constituent des outils, des connaissances et des expertises regroupés et créés dans le cadre de recherches et projets.
1.4.1. GéODEP
GéODEP (Drouin et al., 2013) est un outil de diagnostic spatialisé des exportations de sédiments et de phosphore qui peut être utilisé à l’échelle du bassin versant. L’outil a été développé sur les bases conceptuelles et les algorithmes de l’Outil de diagnostic des exportations de phosphore (ODEP), développé antérieurement par l’IRDA en collaboration avec la commission de la fertilité des sols du Centre de Référence en Agriculture et Agroalimentaire (CRAAQ) (Michaud et al., 2008). ODEP a été développé à l’origine en langage Visual Basic sous un environnement Microsoft Access®. Il était alors destiné à une application à l’échelle d’une parcelle ou d’un ensemble de parcelles données. GéODEP (Drouin et al., 2013) a repris les algorithmes de l’ODEP et permis leur application à l’échelle du territoire par le recours à l’application Model Builder d’ESRI, du SIG ArcGIS. GéODEP fait dès lors intervenir des banques de données géospatiales relatives aux propriétés géophysiques du territoire (données d’élévation, pédologie, hydrographie) et à l’occupation des sols afin de simuler l’effet de scénarios de gestion du parcellaire sur le ruissellement, l’écoulement aux drains, les pertes de sol et les charges de phosphore à l’échelle du bassin versant.
25
1.4.2. QmaxPBV
QmaxPBV (Michaud et al., 2014) est une application de calcul des débits et hauteurs de ruissellements pour des petits bassins versants de moins de 30 km2. Il a comme objectif de définir le temps de concentration, ainsi
que les débits pouvant circuler dans les cours d’eau selon des récurrences variées, permettant ainsi de gérer les différents volumes de ruissellement du bassin à son exutoire. Pour un bassin versant défini, le module procède à la définition de l’arborescence du réseau hydrographique du bassin versant à l’étude et selon la sélection des méthodes de calcul pour la pente, le ruissellement et le temps de concentration, il fournit les résultats correspondants. Cependant, le module dépend des données qu’il doit recevoir d’un SIG.
Les méthodes que propose le module sont les suivantes : - Pente : simple, 85_10 ou hydraulique;
- Ruissellement : SCS (SCS, 1986), Monfet (Monfet,1979) et coefficient de ruissellement;
- Et le temps de concentration : Kirpich (Kirpich, 1940), Mockus (Mockus, 1961), SCS Lag (Folmar et al,2007) et Bransby-Williams (Williams, 1922);
Le débit est par la suite estimé par la méthode rationnelle avec les données de l’IDF.
1.4.3. Géomorphologie
Concordia dispose d’une expertise importante reliée à la géomorphologie appliquée aux cours d’eau du Québec. En plus de leur expertise, deux éléments d’intérêts ressortent de leur travail. Le premier est une procédure de traitement dédiée à fournir les données nécessaires pour procéder au calcul de la puissance spécifique à partir de relevés LiDAR (Biron et al. 2013) et la deuxième est une évaluation de la capacité d’introduire des chenaux à deux niveaux dans les cours d’eau ruraux (Paradis A. et Biron P.M., 2017).
1.5. Législation
Adoptée le 21 décembre 1972, la Loi sur la qualité de l’environnement (LQE, 1972; chap. Q-2) est une initiative du gouvernement du Québec pour réduire les effets du développement anthropiques sur l’environnement. Elle « assure le respect des principes de développement durable, tels que définis dans la loi du développement durable ainsi que la prise en compte des impacts cumulatifs » (Gouvernement du Québec, 2018). Avant d’être ce qu’elle est aujourd’hui, la LQE a fait face à des réticences puisqu’elle aborde et défends les concepts d’« écosystèmes , biosphères et biodiversité » qui étaient peu valorisés et connus. Cette réticence a mené une suite de modifications au fil des années, mais les objectifs que la loi soutient sont aujourd’hui mieux acceptés malgré qu’ils « restent un sujet difficile » (Halley, 2012). Ces objectifs sont : « la protection, l’amélioration, la restauration, la mise en valeur et la gestion de l’environnement » (Gouvernement du Québec, 2018).