Fractal inverse problem: an analytical approach
Texte intégral
Figure

Documents relatifs
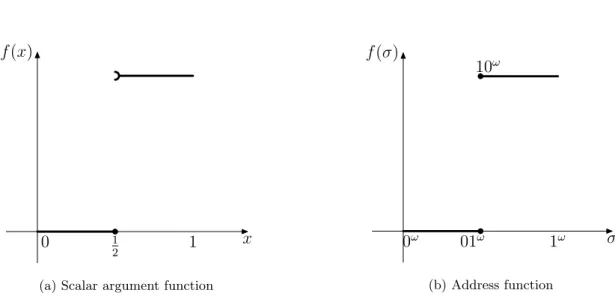
(3) generally holds for hyperbolic maps, one can apply exactly the same technique to non-linear cookie-cutters. Figure 2a) displays the 1D map extracted from the wavelet transform
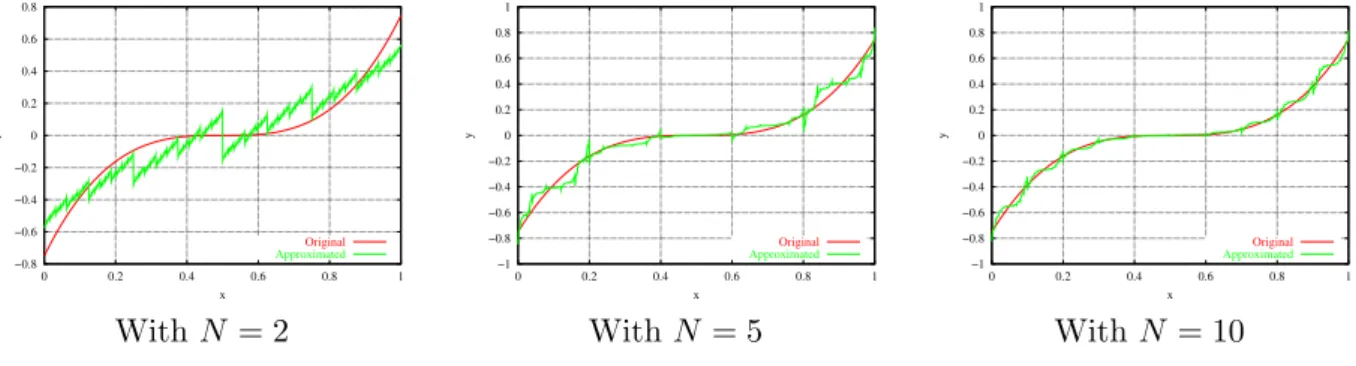
To mitigate the phenomenon of overfitting we can either regularize by adding a penalty on the model in the cost function which would penalize the too strong oscillations
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
Therefore, there is no reuse within the activities of modelling ontology axioms, choosing ontologies for use in data graphs, and creating SHACL shapes to validate the data graph..
In the second step the network is characterized regarding: (i) the QSD of the provided objects, (ii) the kind of connections, and (iii) the new composed features of angle, convexity
The loss expression in rectangular regions can be both used for the computation of the macroscopic classical loss component (i.e. currents flowing at the scale of the
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
We discuss an approach based on the model space theory which brings some integral representations for functions in R n and their derivatives.. Using this approach we obtain L p
