HAL Id: hal-02596563
https://hal.inrae.fr/hal-02596563
Submitted on 15 May 2020HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
Rapport fin de projet IMPALA
M.O. Monod
To cite this version:
M.O. Monod. Rapport fin de projet IMPALA. [Rapport de recherche] irstea. 2011, pp.23. �hal-02596563�
! "
# $
% % !
$"&% # '$"!
% % !
$"&% # '$"!
(
) "
*
*
% % !
$"&% # '$"!
$ "
+
,-% -% &
%
"
-. /
#
'$%
"0 1 %
& $2
-*
##
!3
!"
"("0
!3 "0
4
5
% $
'
4
+
/#$ "
"
&
% $
*
" !
"
5
-
!$ "
+
6
%(%
!
+
7 -86
&"!
&2"
# !
6
"
&
# '$"!
"
!
"!
"
4
*
"
&
%$%
& 9 $
"
"
5
"$
"9" &
#
$
! %
:3
" "
;
CemOA : archive ouverte d'Irstea / Cemagref! = & # . " & # . & # "0 3=# ( %0 ! # $ $ ! $" " $ ! #3" &= "0 " $ % 9" / % " &" & # . : !"% %< " ; " > &"$ & ( % " & & # .
:& & &%' ? & & (" ;
6< < - ? 6< <
" @ ' & # . 1 $ ! %!3% 3 # A<<" # $ ! ( ( <
%& ! & ! ##
"9"$" %1 # % 1 " > &"$ &
%$%#3 5 -* 55
& %$ ! "0 " > &"$ &B! ( (
& %& ! " < -<
" &"((% & %& ! 1 " &"0 ! ! # $ # . "9"$" %1 # % 1 %$%#3 & %$ ! "0 " & # " # % C $ (" & # . : !"% %< " # '$ !" "("0 ; ( : " > &"$ &; : $ & 3 # " ; D # "0 :8 E$ "$$ 1 # " 3"$"## F ; !" ! "
Ce résumé est destiné à être diffusé auprès d’un large public pour promouvoir les résultats du projet, il ne fera donc pas mention de résultats confidentiels et utilisera un vocabulaire adapté mais n’excluant pas les termes techniques. Il en sera fourni une version française et une version en anglais. Il est nécessaire de respecter les instructions ci-dessous.
# ! " ! " ! !" ! ! ! " !
Les résumés publics en français et en anglais doivent être structurés de la façon suivante. Titre d’accroche du projet (environ 80 caractères espaces compris)
Titre d’accroche, si possible percutant et concis, qui résume et explicite votre projet selon une logique grand public : il n’est pas nécessaire de présenter exhaustivement le projet mais il faut plutôt s’appuyer sur son aspect le plus marquant.
Les deux premiers paragraphes sont précédés d’un titre spécifique au projet rédigé par vos soins.
Titre 1 : situe l’objectif général du projet et sa problématique (150 caractères max espaces compris) Paragraphe 1 : (environ 1200 caractères espaces compris)
CemOA
: archive
ouverte
d'Irstea
*< * Le paragraphe 1 précise les enjeux et objectifs du projet : indiquez le contexte, l’objectif général, les problèmes traités, les solutions recherchées, les perspectives et les retombées au niveau technique ou/et sociétal
Titre 2 : précise les méthodes ou technologies utilisées (150 caractères max espaces compris) Paragraphe 2 : (environ 1200 caractères espaces compris)
Le paragraphe 2 indique comment les résultats attendus sont obtenus grâce à certaines méthodes ou/et technologies. Les technologies utilisées ou/et les méthodes permettant de surmonter les verrous sont explicitées (il faut éviter le jargon scientifique, les acronymes ou les abréviations).
Résultats majeurs du projet (environ 600 caractères espaces compris)
Faits marquants diffusables en direction du grand public, expliciter les applications ou/et les usages rendus possibles, quelles sont les pistes de recherche ou/et de développement originales, éventuellement non prévues au départ.
Préciser aussi toute autre retombée= partenariats internationaux, nouveaux débouchés, nouveaux contrats, start-up, synergies de recherche, pôles de compétitivités, etc.
Production scientifique et brevets depuis le début du projet (environ 500 caractères espaces compris)
Ne pas mettre une simple liste mais faire quelques commentaires. Vous pouvez aussi indiquer les actions de normalisation
Illustration
Une illustration avec un schéma, graphique ou photo et une brève légende. L’illustration doit être clairement lisible à une taille d’environ 6cm de large et 5cm de hauteur. Prévoir une résolution suffisante pour l’impression. Envoyer seulement des illustrations dont vous détenez les droits.
Informations factuelles
Rédiger une phrase précisant le type de projet (recherche industrielle, recherche fondamentale, développement expérimental, exploratoire, innovation, etc.), le coordonnateur, les partenaires, la date de démarrage effectif, la durée du projet, l’aide ANR et le coût global du projet, par exemple « Le projet XXX est un projet de recherche fondamentale coordonné par xxx. Il associe aussi xxx, ainsi que des laboratoires xxx et xxx). Le projet a commencé en juin 2006 et a duré 36 mois. Il a bénéficié d’une aide ANR de xxx € pour un coût global de l’ordre de xxx € »
# !" ! " $ !
• Titre d’accroche
L’imagerie Radar pour améliorer la localisation des robots mobiles en environnement extérieur
• Titre 1
Accroitre l’autonomie et la sécurité des moyens d’intervention
Alors que la robotique destinée aux milieux intérieurs a atteint un niveau de maturité permettant d’envisager un développement industriel rapide, l’expansion de la robotique d’extérieur nécessite encore la levée de quelques verrous. Les études montrent que les secteurs comme la sécurité civile qui sont demandeurs de nouveaux moyens d’action robotisés et sont appelés à intervenir dans des scénarios de catastrophes naturelles, d’accidents industriels ou d’incendies, ont besoin de systèmes fiables adaptés à de telles situations. CemOA : archive ouverte d'Irstea / Cemagref
L’emploi de la technologie radar comme système de perception apparaît très prometteuse pour étendre les performances et la robustesse des systèmes robotisés, avec un fonctionnement par tous les temps, de nuit comme de jour et la possibilité de détecter simultanément des obstacles fixes ou mobiles. L’utilisation combinée du radar et des techniques de « localisation et de cartographie simultanées » constitue une alternative aux systèmes de localisation précis mais coûteux tels que le GPS cinématique qui, de plus, peuvent être perturbés par des masquages dus aux bâtiments ou à la végétation.
La capacité à construire une carte locale de l’environnement au fur et à mesure du déplacement est un atout supplémentaire offert aux robots et aux engins d’intervention appelés à évoluer dans des environnements inconnus.
• Titre 2
Le Radar, un système de perception original
Basé sur l’émission d’une onde électromagnétique dans les radiofréquences, le radar est capable de détecter des obstacles en fournissant leur distance et leur vitesse. A la différence du laser, son large faisceau de balayage lui permet de distinguer en un seul passage plusieurs obstacles situés dans le même angle de visée. Lorsque l’antenne tourne dans le plan horizontal, une image radar « panoramique » se forme, où apparaissent les échos provenant des obstacles fixes et mobiles de l’environnement.
Si le radar est embarqué sur un véhicule qui se déplace dans un espace inconnu, on obtient au fur et à mesure du déplacement une succession d’images panoramiques. A partir de ces informations, des algorithmes spécifiques basés sur les techniques de SLAM (Simultaneous Localization And Mapping) ont été développés pour construire simultanément la trajectoire du véhicule et la carte locale de sa zone d’évolution. L’ensemble a été implémenté sur le véhicule démonstrateur R-Trooper de THALES et testé en conditions climatiques variées dans des environnements représentatifs des situations rencontrées sur le terrain.
• Résultats majeurs du projet
Un des résultats marquants du projet a été de montrer l’intérêt d’associer un radar hyperfréquence à des techniques de localisation et de cartographie simultanées, association qui devrait permettre de répondre aux besoins et aux contraintes de fonctionnement particulièrement exigeantes rencontrées en robotique mobile d’extérieur.
Le projet se tourne aujourd’hui vers des applications environnementales, notamment le suivi morphologique de cours d’eau, avec le démarrage d’un projet Emergence de l’ANR et avec le soutien du pôle de compétitivité ViaMéca qui l’accompagne dans sa valorisation industrielle.
• Production scientifique et brevets
Au total une quinzaine de communications ont été présentées dans des conférences internationales et nationales. Elles positionnent les travaux originaux qui associent le SLAM et les données radar : IEEE International Conference on Robotics and Automation (ICRA), IEEE International Conference on Intelligent Robots and Systems (IROS), IEEE International Conference on Radar Systems (RADAR)…
CemOA
: archive
ouverte
d'Irstea
+< * Les applications environnementales des techniques de cartographie radar ont aussi fait l’objet de communications dans des congrès tels que IEEE European Conference on Ocean and Coastal Observations (OCOSS).
• Illustration
Associé à des algorithmes de SLAM le Radar permet à un véhicule en mouvement de se localiser tout en construisant une carte de son environnement
• Informations factuelles
Le projet IMPALA « Radar panoramique hyperfréquence pour la localisation et la cartographie dynamiques simultanées en environnement extérieur » est un projet de recherche industrielle coordonné par le CEMAGREF. Il associe également le Laboratoire des Sciences et Matériaux pour l’Electronique et d’Automatique de Clermont-Ferrand (LASMEA), ainsi que THALES Optronique S.A. Le projet a débuté en juin 2007 et s’est terminé en juin 2011. Il a bénéficié d’une aide ANR de 436 k€ pour un coût global de 1.5 millions d’euros.
#% !" ! " & !
• Titre d’accroche
Radar imaging to improve the localization of mobile robots in outdoor environment
• Titre 1
Increasing the autonomy and safety of rescue means
While indoor robotics has reached a maturity level for considering a rapid industrial development, expansion of outdoor robotics still requires the removal of some locks. Studies show that a sector such as civil security, which needs new resources in robotics, is called upon to intervene in situations as diverse as natural disasters, industrial accidents or fires.
CemOA
: archive
ouverte
d'Irstea
These situations require an increase in robustness of such systems with respect to disturbances or hazards encountered. The use of radar technology as means of perception appears very promising to extend the performance and robustness of robots, particularly as it works in all weather and gives the possibility to simultaneously detect multiple targets whether static or moving. The combined use of radar and “Simultaneous Localization And Mapping” (SLAM) techniques is an alternative way for a robot to localize without a kinematic GPS which may be disrupted by masking from buildings and vegetation. The ability to build a local map of the environment when moving is an additional asset for vehicles which evolve in unfamiliar regions.
• Titre 2
Radar as an original perception sensor
Based on the emission of electromagnetic waves in radio frequencies, the radar can detect obstacles while providing their respective distance and velocity. Unlike the laser, its wide scanning beam allows to distinguish in a single pass several obstacles in the same viewing angle. If the antenna rotates in the horizontal plane, a "panoramic radar image" forms, showing the echoes from static and moving obstacles in the environment.
When the radar is placed on a mobile robot moving in an unknown space, a series of successive panoramic images is obtained while moving. From this information, specific algorithms based on SLAM techniques have been developed to simultaneously build the robot trajectory and the map of its immediate environment. The set was implemented on the robotic vehicle R-TROOPER from THALES and tested in different climatic conditions and environments representative of situations commonly encountered.
• Résultats majeurs du projet
A significant outcome of the project was to demonstrate the benefit of combining microwave radar and “Simultaneous Localization And Mapping” techniques to meet the needs and operating constraints encountered in outdoor robotics.
• Production scientifique et brevets
About fifteen papers were presented in international and national conferences. They confirm the position of original work that combines SLAM techniques and radar data: IEEE International Conference on Robotics and Automation (ICRA), IEEE International Conference on Intelligent Robots and Systems (IROS), IEEE International Conference on Radar Systems (RADAR)… Environmental Applications of radar mapping techniques have also been the subject of communications at conferences such as IEEE European Conference on Ocean and Coastal Observations (OCOSS).
• Illustration
Combined with SLAM algorithms the Radar allows a vehicle to localize while building a map of its environment
CemOA
: archive
ouverte
d'Irstea
-< *
! '"
: Non
# !" "
Alors que la robotique destinée aux milieux intérieurs a atteint un niveau de maturité permettant d’envisager un développement industriel rapide, l’expansion de la robotique d’extérieur nécessite encore la levée de quelques verrous. Les études montrent que les secteurs comme la sécurité civile qui sont demandeurs de nouveaux moyens d’action robotisés et sont appelés à intervenir dans des scénarios de catastrophes naturelles, d’accidents industriels ou d’incendies, ont besoin de systèmes fiables adaptés à de telles situations.
L’emploi de la technologie radar comme système de perception apparaît très prometteuse pour étendre les performances et la robustesse des systèmes robotisés, avec un fonctionnement par tous les temps, de nuit comme de jour, et la possibilité de détecter simultanément des obstacles fixes ou mobiles. L’utilisation combinée du radar et des techniques de « localisation et de cartographie simultanées » constitue une alternative aux systèmes de localisation précis mais coûteux tels que le GPS cinématique qui, de plus, peuvent être perturbés par des masquages dus aux bâtiments ou à la végétation.
La capacité à construire une carte locale de l’environnement au fur et à mesure du déplacement est un atout supplémentaire offert aux robots et aux engins d’intervention appelés à évoluer dans des environnements inconnus.
# ( ") '" * +
En milieu extérieur, les conditions d’évolution d’un robot dépendent de paramètres incontrôlables tels que les conditions climatiques ou la nature du terrain. Dans de nombreuses applications civiles ou militaires, les systèmes robotisés assistent l’homme en permettant d’épargner des vies, comme dans la prospection des zones minées ou les interventions après une catastrophe naturelle. L’évolution de tout robot en environnement inconnu repose sur l’acuité de ses « sens » de perception qui l’assistent dans sa faculté à se localiser, mais aussi à évoluer dans un environnement qu’il est amené à découvrir au cours de sa mission. D’où les problèmes rencontrés avec les capteurs actuels constitués essentiellement de systèmes optiques, dans les conditions de fonctionnement en milieu extérieur (brouillard, neige, poussière, variation d’éclairement, etc.). Des capteurs plus polyvalents et plus robustes doivent être recherchés pour garantir une plus grande fiabilité aux robots destinés à évoluer dans ces environnements difficiles. La technologie Radar est capable d’apporter une réponse à ces verrous, car elle est insensible aux conditions climatiques, autorise de longues portées et apporte des informations essentielles sur les éléments de l’environnement, comme la distance et la vitesse radiale des obstacles. Aujourd’hui, c’est dans le domaine des systèmes anticollision [JCH03] ou du contrôle de vitesse des véhicules que le radar trouve la majorité de ses applications civiles. Ses capacités de mesure à grande distance quelles que soient les conditions météorologiques sont également utilisées dans le domaine de la prévention contre les avalanches et les glissements
CemOA
: archive
ouverte
d'Irstea
de terrain [MS05], la surveillance d’ouvrages ou la volcanologie [GW04], [FD05]. Les applications du radar en robotique mobile sont encore peu nombreuses et concentrés au niveau international dans une poignée d’équipes de recherche utilisant des radars millimétriques de type anticollision pour l’identification [EJ04], le suivi [GB05b], la localisation [GD01], la cartographie 3D [AF01], [SS02].
La localisation, la cartographie et le suivi d’entités dynamiques constituent les fondements de l’analyse de scènes qui est la fonction primordiale pour doter d’autonomie un robot mobile. Pour envisager l'arrivée de véhicules autonomes qui auront à évoluer en milieu naturel, périurbain voire urbain, il est souhaitable de disposer d'un système capable de construire automatiquement l'environnement tout en se localisant. Même s’il est possible de disposer initialement d’une carte du site, ce qui impose une contrainte, l'infrastructure peut évoluer. En outre, la présence d'autres véhicules et/ou de piétons rend l'environnement dynamique, donc incohérent par rapport à la carte statique initiale. Pour un robot autonome, le fait d’effectuer sa localisation et une cartographie en simultané tout en suivant des objets mobiles (SLAMMOT pour Simultaneous Localization And Mapping and Moving Object Tracking) permet d'envisager sa navigation automatique de manière sûre, tout en fournissant une carte globale de la scène. S'il est vrai que la technique SLAM (Simultaneous Localization And Mapping) formalisée depuis [CL85], [SC87] et [MC89], dispose d'ores et déjà de plusieurs méthodes et réalisations, il n'en demeure pas moins que les problèmes scientifiques tels que l'exploration de sites extérieurs étendus, et/ou l'association pertinente des données restent ouverts. Depuis quelques années, des avancées significatives ont été accomplies en ce qui concerne la solution du problème du SLAM [DNCDW01]. Une approche largement répandue est donc fondée sur l'emploi du filtre de Kalman (étendu). Plusieurs réalisations sont à noter en milieu d'intérieur [LDW91] et d'extérieur [GN01]. Une des difficultés majeure de ce type d'approche tient à sa complexité algorithmique [MC89]. Pour des missions de longue durée dans des environnements étendus, le nombre d'amers augmente et les ressources informatiques deviennent insuffisantes pour mettre à jour la carte en temps réel. Il est donc extrêmement important de bien sélectionner le type d'amers à exploiter. Malheureusement, ce choix est rendu encore plus difficile par la nature du capteur employé, surtout en milieu extérieur ! La plupart des travaux ont été conduits à l’aide de capteurs extéroceptifs de type laser ou sonar.
Le SLAM repose sur l’hypothèse forte que l’environnement est statique. Si des éléments dynamiques sont présents ils doivent être détectés et filtrés. Or, depuis plusieurs décennies, des recherches sur la détection et le suivi d’objets mobiles (DATMO pour Detection And Tracking of Moving Objects) sont menées [BL95]. Le SLAMMOT vise à combiner ces deux techniques. Les estimations de la pose du robot et de la carte environnante issues du SLAM permettent d’identifier et de suivre les objets mobiles. Les positions prédites par le DATMO permettent d’isoler les entités dynamiques pour améliorer le processus SLAM.
L’approche proposée dans le projet IMPALA qui combine un radar panoramique hyperfréquence et des techniques de SLAM et SLAMMOT constitue un axe de recherche véritablement original, très peu de laboratoires au niveau international ayant investi le domaine du SLAM en s’appuyant sur des données issues d’un radar [JA04].
CemOA
: archive
ouverte
d'Irstea
4< *
#% , ! '" , '"
Le programme de travail a été décomposé en trois sous-ensembles sous la responsabilité de chacun des trois partenaires du projet : le premier sous-ensemble (WP1) concernait l’ensemble des travaux liés au radar, le second (WP2) le développement de méthodes permettant de répondre aux problématiques du SLAM et du SLAMMOT, le troisième (WP3) regroupait les travaux d’intégration et les campagnes d’expérimentations sur un démonstrateur de robotique mobile d’extérieur.
Le premier objectif a été de développer une application SLAM en environnement statique, à partir de données fournies par le radar K2Pi préalablement réalisé par le Cemagref. A cette fin une importante banque de données « radar » a été constituée au fil d’expérimentations réalisées soit en milieu urbain et périurbain, à l’aide d’un véhicule de laboratoire spécialement équipé, soit en milieu naturel avec le démonstrateur R-Trooper, véhicule robotisé de THALES capable d’évoluer dans des environnements naturels. La prise en main des données radar a nécessité le développement d’un simulateur fonctionnel du radar K2PI, afin de permettre aux équipes de se familiariser avec ce type de données. Une fois mis au point, l’algorithme SLAM a été implémenté dans l’environnement matériel et logiciel du démonstrateur R-Trooper en vue de l’application temps réel.
Le second objectif concernait la problématique SLAMMOT dans un environnement constitué à la fois de cibles fixes et de cibles mobiles. La prise en compte des objets mobiles a nécessité la conception d’un nouveau radar, appelé IMPALA capable de mesurer la vitesse radiale des éléments mobiles de l’environnement. Un simulateur du radar IMPALA a été développé pour faciliter la mise au point des algorithmes associés.
Enfin, une campagne d’expérimentation a réuni en fin de projet l’ensemble des partenaires durant une semaine, semaine au cours de laquelle l’ensemble des algorithmes a été testé sur le démonstrateur R-Trooper équipé du radar IMPALA et de capteurs de contrôle de vérité terrain, sur un jeu de scénarios représentatif de situations rencontrées en milieu ouvert.
#- !" ! "!
Sur la durée du projet le LASMEA a proposé plusieurs approches SLAM, chacune répondant à un défi par rapport aux contraintes de fonctionnement imaginées. Peu de travaux avaient été menés en robotique mobile pour exploiter des radars de type FMCW (Frequency Modulated Continuous Wave). Mais étonnamment, les expérimentations de Clark [1] à la fin du siècle dernier menées dans un environnement d’extérieur contenant un faible nombre de réflecteurs, régulièrement répartis, servirent de validation à la solution formelle du SLAM fournie dans [2].
En partant de l’observation que le radar K2Pi initial réalisait des acquisitions de panoramiques (rayon de détection de 100 m) toutes les secondes, il a fallu trouver un procédé efficace de recherche des transformations rigides entre deux panoramiques successifs afin de déterminer les déplacements du véhicule : nous avons opté pour la transformée de Fourier-Mellin (ou Fourier-Mellin Transform : FMT) [IMP-1]. L’algorithme de SLAM, nommé « Radar Scan-SLAM using FMT » (RS-SLAM-FMT), estime à l’aide des transformations trouvées le déplacement du véhicule au fur et à mesure de l’acquisition des panoramiques. Le vecteur d’état est constitué de toutes les positions successives estimées du véhicule. On parle alors de SLAM orienté trajectoire [IMP-2]. Les points novateurs de cette
CemOA
: archive
ouverte
d'Irstea
approche sont liés à l’utilisation d’une nouvelle méthode de mise en correspondance lors de la recherche de la transformation rigide entre deux panoramiques. Par ailleurs, il a fallu adapter les algorithmes de SLAM existants et trouver une technique de gestion des boucles appropriée (parcours ou le véhicule passe plusieurs fois au même endroit). La solution SLAM fournie n’avait été explorée ni dans le cadre des approches Scan-Matching SLAM ni pour traiter des panoramiques radar et leurs spécificités (bruit important, occultation de certaines zones de l’image). Un autre attrait de cette technique se situe dans les temps de calculs qu’elle propose, ils sont en effet excellents en comparaison avec d’autres méthodes de la littérature tel que « Iterative Closest point (ICP) ». Une évaluation et une comparaison de l’algorithme « RS-SLAM-FMT » ont été menées dans [IMP-3]. Les figures suivantes illustrent les résultats obtenus. Enfin, conformément aux attendus du projet, une implémentation temps réel de cet algorithme a été réalisée et testée dans l’environnement matériel et logiciel du démonstrateur R-Trooper.
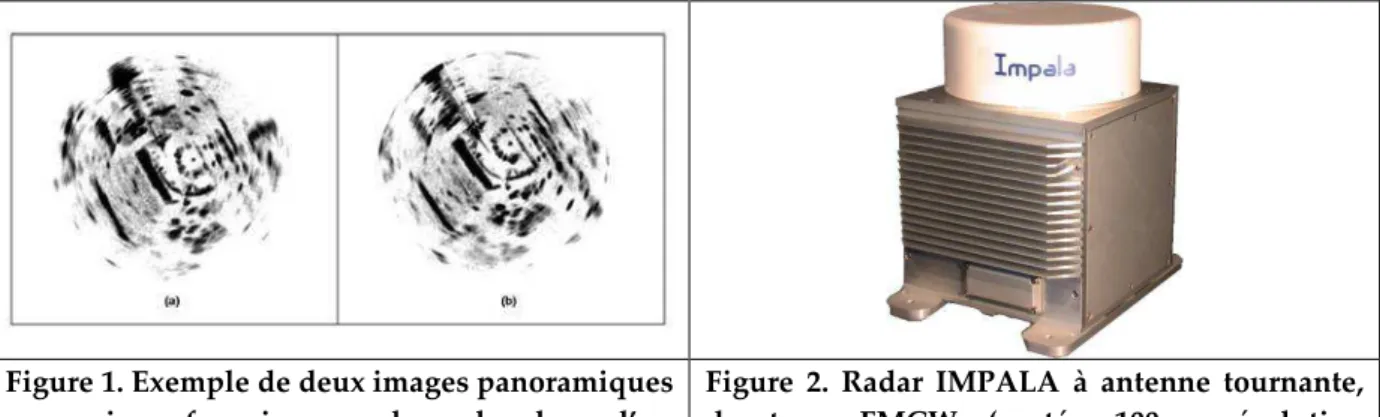
Figure 1. Exemple de deux images panoramiques successives fournies par le radar lors d’un parcours en zone urbaine
Figure 2. Radar IMPALA à antenne tournante, de type FMCW (portée 100m, résolution 1°/50cm, poids 10kg, dim. 30x30x30cm)
Figure 3. Parcours bouclé en zone périurbaine (850m) – en rouge la vérité terrain (GPS), en bleu la trajectoire estimée par le RS-SLAM-FMT, en noir l’estimation de la covariance associée à chaque position
Figure 4. Carte de la zone reconstruite à partir de l’algorithme RS-SLAM-FMT CemOA : archive ouverte d'Irstea / Cemagref
< * Le radar IMPALA qui a été réalisé dans le cadre du projet s’appuie sur la technique FMCW à modulation en toit, et non pas sur la technique numérique ILFM (Intertwined Linear Frequency Modulation) initialement envisagée et qui a fait l’objet d’une communication à la conférence RADAR’09 [IMP-5]. En effet, le synthétiseur hyperfréquence que nous avons spécialement fait réaliser à cette intention ne respectait pas les spécifications techniques qui avaient été imposées. Compte tenu des délais, nous avons dû opter pour une solution plus classique utilisant une modulation en toit où chaque cible est affectée d’une vitesse doppler dont le signe diffère selon la pente de la modulation. Avec ce type de modulation la difficulté en environnement complexe est d’associer correctement les cibles détectées sur la pente montante avec celles qui sont détectées sur la pente descendante. Nous avons développé une technique d’appariement à base de contrôleur flou qui permet d’extraire à la fois la distance et la vitesse radiale des cibles. A partir des éléments fixes de l’image, cet algorithme permet aussi de calculer la vitesse d’avancement du véhicule. Un étalonnage automatique s’effectue durant les premières minutes de la mise en route, pendant lesquelles il est nécessaire que le radar soit immobile.
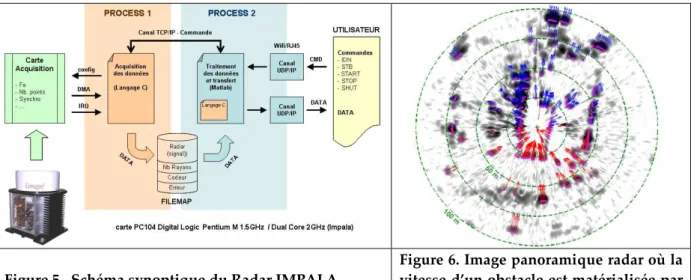
Figure 5. Schéma synoptique du Radar IMPALA
Figure 6. Image panoramique radar où la vitesse d’un obstacle est matérialisée par une flèche rouge s’il s’approche du radar et bleue s’il s’en s’éloigne
Le graphique ci-contre illustre la comparaison entre la vitesse d’avancement du véhicule (ici 5m/s) mesurée avec un odomètre (en rouge) et la vitesse calculée à partir de la mesure doppler sur les éléments fixes de l’environnement (en bleu).
L’imageur radar IMPALA délivre en temps réel sur le canal UDP/IP une image panoramique de l’environnement autour du robot (0-100m et 0-360°). L’énergie rétrodiffusée par les obstacles est codée en niveaux de gris. Le radar peut, selon les applications, fournir deux types d’information : soit une image de l’environnement pour des applications de cartographie et de localisation [IMP-6], [IMP-7], soit fournir pour chaque obstacle détecté un triplet de données (distance, vitesse, angle). Un canal spécifique de commande permet le paramétrage et le pilotage du capteur (start, stop, status, etc.).
CemOA
: archive
ouverte
d'Irstea
Avec l'utilisation d'un capteur à tête rotative comme le radar K2Pi ou sa version IMPALA, lorsque le véhicule porteur se déplace à grande vitesse, les données fournies ne peuvent pas être considérées comme prises instantanément depuis une position unique. En effet, durant la période d'acquisition du capteur (1 seconde), le véhicule qui se déplace à une vitesse de 50 km/h aura parcouru 15 mètres durant l'acquisition. Ce mouvement et donc la distorsion qu'il implique sur les données ne peuvent pas être négligés, comme le montre la figure ci-dessous.
Figure 7. Simulations d’acquisitions d’images panoramiques depuis un porteur en mouvement Une approche de SLAM à la volée orientée amer, nommée « On-The-Fly SLAM » (OTF-SLAM), a aussi été développée pour une utilisation dans un environnement structuré [IMP-4]. L’algorithme OTF-SLAM est en mesure de traiter des données qui ne peuvent pas être considérées comme instantanées par rapport à la dynamique du véhicule, et qui deviennent globalement distordues. Une solution de cartographie qui prend en compte le mouvement du capteur dans les équations d'observation ainsi que la dynamique du véhicule a été mise en place. Cette approche a été validée sur des données laser réelles. De plus une évaluation de la qualité de la carte obtenue a été proposée et menée dans le projet. L’algorithme a été appliqué sur des données radar issues des expérimentations réalisées avec THALES.
Mais dans les deux cas précédents, les informations proprioceptives étaient nécessaires pour reconstruire correctement la trajectoire du véhicule et la carte de son environnement exploré. C’est pourquoi les travaux se sont également concentrés sur une solution de localisation et de cartographie à partir de données radar uniquement. Les tentatives similaires dans le domaine vision pour la robotique sont récentes. Ainsi, on citera Howard [3], Kitt et al. [4] ou Nistér et al. [5] ou encore [6,7] qui proposèrent des approches d’odométrie visuelle.
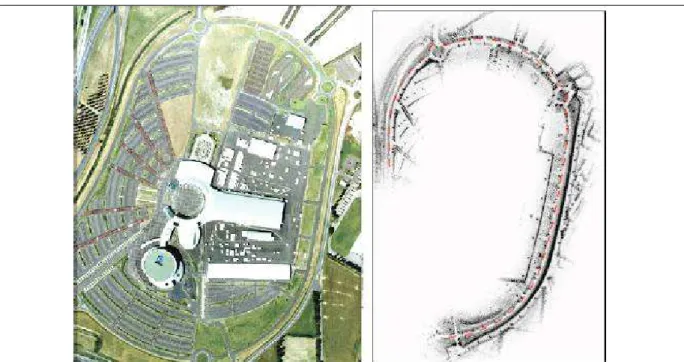
Cette troisième contribution SLAM, comme la précédente, est compatible avec les versions K2Pi et IMPALA du radar panoramique. Cette approche nommée « Radar-Only Localization And Mapping » (ROLAM) est fondée sur l’analyse du phénomène de distorsion affectant les images radar. L’algorithme, qui respecte naturellement les contraintes temps réel, a été testé sur des expérimentations menées à des vitesses dépassant les 30 km/h. Un parcours de 2,5km est représenté sur la Figure 8.
Un autre volet du projet comprenait pour le développement d’une technique de SLAMMOT (Simultaneous Localization and Mapping & Moving Object Tracking). Pour y parvenir, une première étape d’estimation de la vitesse du porteur par analyse Doppler a été réalisée et validée. Une seconde étape a consisté à mettre en œuvre une technique DATMO (Detection
CemOA
: archive
ouverte
d'Irstea
*< * And Tracking of Moving Objects). Seules des données du radar IMPALA avec véhicule porteur statique ont pu être exploitées pour évaluer l’approche. Cette dernière est capable de gérer des situations mono ou multi-cibles.
Figure 8. Vue aérienne et résultat de l’approche « Radar-Only Localization And Mapping » (ROLAM). Aucune donnée proprioceptive n’est utilisée
#. ) ! !" !
Tout au long du projet, différentes campagnes d’essais ont eu lieu, sur des sites variés apportant chacun des conditions différentes. Les sites utilisés ont permis de couvrir des environnements de type forêt, zone ouverte (champ), zone « urbaine », voire industrielle... Les conditions météorologies ont également été très variées, allant du grand soleil en période estivale, jusqu’à des périodes de chutes de neiges importantes.
L’ensemble des acquisitions a été réalisé sur un porteur représentatif : l’UGV R-Trooper de THALES. Ce robot est par construction prédisposé à accueillir de nouveaux capteurs aussi bien d’un point de vue mécanique que logiciel. L’intégration mécanique a nécessité la constitution d’un support capteur en prenant en compte les contraintes d’optimisation des champs de vues de l’ensemble des capteurs déjà intégré au robot. Le R-Trooper dispose également de calculateurs relativement puissants permettant de faire tourner les logiciels d’acquisitions mais également de traitement dans un environnement de prototypage rapide : RT-Maps de Intempora. Grâce à ce logiciel et au développement de composants spécifiques, il a été possible de constituer des bases de données lors des séances d’acquisitions. Ces bases de données sont ensuite rejouables à volonté sur banc, tout en respectant les aspects temporels de l’acquisition. L’algorithme de SLAM a également été porté de l’environnement Matlab vers cet environnement RT-Maps afin de disposer d’une version temps réel exploitable sur le robot. Un processus d’optimisation de l’algorithme a permis de le rendre compatible des contraintes temps réel et en particulier de rendre son temps de traitement compatible du temps d’acquisition, soit 1 seconde.
CemOA
: archive
ouverte
d'Irstea
Pour se donner les moyens de comparer cette solution technologique de localisation, lors de la dernière campagne d’essais d’autres solutions ont également été exploitées. Ces autres solutions de localisations sont représentatives de ce que l’on rencontre sur ce type de robot : cap / odométrie, GPS naturel, SLAM LIDAR.
Figure 9. Démonstrateur R-Trooper équipé du radar lors dune campagne d’essais sur un site industriel en hiver (février 2009)
Figure 10. Démonstrateur R-Trooper en action lors d’une campagne d’expérimentations en site ouvert (mai 2010)
# ! "!!
Lors de ce projet un accent fort a été mis sur la validation terrain des développements aussi bien du radar que des algorithmes. Il est indispensable, pour bien analyser l’apport de cette technologie, de la confronter aux réalités du terrain. C’est pourquoi un ensemble de scénarios aussi variés que possible a été élaboré correspondant à des environnements représentatifs des différents contextes d’emplois visés. La démarche mise en place a consisté à réaliser des acquisitions « simples » pour la mise au point des algorithmes, mais également des acquisitions cherchant à mettre à l’épreuve aussi bien le domaine de fonctionnement du radar que celui des algorithmes. Les premiers tests ont d’abord été réalisées à des vitesses et dans des environnements favorables aux algorithmes pour en déterminer la précision, puis dans des environnements complexes (rupture de pente, peu d’amers disponibles dans l’environnement, progression saccadée du porteur…) afin de déterminer les conditions de décrochage.
Des progrès restent néanmoins à accomplir pour réduire l’influence du paramétrage de l’algorithme sur les temps de calcul. Un couplage des algorithmes OTF-SLAM et ROLAM avec l'algorithme DATMO reste à mettre en œuvre sur un jeu de données incluant le radar en mouvement dans une scène dynamique, pour être en mesure de proposer une approche SLAMMOT radar. Ces travaux sont aujourd’hui en voie d’achèvement avec les thèses de D. Vivet et F. Gérossier qui se terminent fin 2011. Une analyse reste également à mener sur les performances obtenues dans le cadre de la détection et le suivi d'objets mobiles, en lien direct avec les travaux de thèses.
CemOA
: archive
ouverte
d'Irstea
+< *
#/ "! !
Le projet a montré le potentiel de la technologie radar, qui associée à des algorithmes de localisation et de cartographie simultanées (SLAM et SLAMMOT) permet à l’utilisateur de disposer d’une carte d’amers plus riche qu’avec d’autres techniques telles que le lidar, dans un domaine de fonctionnement étendu (longue portée, insensibilité aux conditions météorologiques). Le SLAM radar peut ainsi répondre aux contraintes de fonctionnement particulièrement difficiles rencontrées en robotique mobile d’extérieur en apportant des solutions à la localisation lors de masquages GPS et en contribuant à la voie encore peu explorée de la cartographie environnementale. Au total une quinzaine de communications ainsi que des démonstrations ont été présentées dans des conférences et des congrès. Ces résultats positionnent à l’échelle internationale dans les communautés scientifiques à la fois de la robotique et du Radar, les travaux originaux associant SLAM et radar qui ont été conduits durant le projet.
Celui-ci a par ailleurs bénéficié d’un soutien complémentaire apporté par le programme FEDER « Compétitivité Régionale et Emploi 2007-2013 » de la Région Auvergne. Ce projet associé a permis de commencer à explorer en parallèle le potentiel de la technologie dans les applications de cartographie environnementale (suivi morphologique de cours d’eau). Suite à l’intérêt manifesté par les acteurs de ce domaine, un projet Emergence de l’ANR a été déposé en 2010. Il permettra de poursuivre les travaux et de renforcer, avec le soutien du pôle de compétitivité VIAMECA, le potentiel de valorisation de cette technologie.
#0 !
Références paragraphe C-2
[AF01] Foessel A., Bares J., and Whittaker W.L. “Three-Dimensional Map Building with MMW Radar”. Proceedings of the 3rd International Conference on Field and Service Robotics, Yleisjäljennös - Painnopörssi, Helsinki, Finland, June, 2001.
[BL95] Yaakov Bar-Shalom and Xia-Rong Li. Multitarget-Maultisensor Tracking: Principles, Techniques. YBS, Danvers, MA, 1995.
[CL85] R. Chatila and J. P. Laumond. Position Referencing and Consistent World Modeling for Mobile Robots. In Proc 2nd IEEE International Conf. on Robotics and Automation, pages 138--145, St. Louis, March 1985.
[DNCDW01] G. Dissanayake, P. Newman, H.F. Durrant-Whyte, S. Clark, M. Csobra, ‘A solution to the simultaneous localisation and map building (SLAM) problem’. IEEE Trans. on Robotics and Automation, 17(3), 229-241, 2001.
[EJ04] Jose E. and Adams M. “Relative RADAR Cross Section based Feature Identification with Millimetre Wave RADAR for Outdoor SLAM”. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2004, Sendai, Japan. September 2004.
[FD05] Donnadieu F., Dubosclard G., Cordesses R., Allard P., Druitt T.H., Fournet-Fayard J., Hervier C., Kornprobst J., Lénat J.-F., Coltelli M. “Ground-based Doppler radar monitoring provides new tool for the remote sounding of explosive volcanic activity. E.O.S. Trans. A.G.U., 86 (21), pp. 201-204, 2005. [GB05b] Brooker G.M. “Millimetre wave radar for tracking and imaging applications”. International Conference on Sensing and Technology, Palmerston North, New Zealand, 2005.
CemOA
: archive
ouverte
d'Irstea
[GD01] Dissanayake G., Newman P., Durrant-Whyte H.F., Clark S., Csobra M. “A solution to the simultaneous localisation and map building (SLAM) problem”. IEEE Trans. on Robotics and Automation, 17(3), 229-241, 2001.
[GN01] José E. Guivant and Eduardo M. Nebot. Optimization of the Simultaneous Localization and Map Building Algorithm for Real Time Implementation. IEEE Transaction of Robotic and Automation, 17(3) :242-257, June 2001.
[GW04] Wadge G., Macfarlane D.G., Robertson D.A., Hale A.J., Pinkerton H., Burrell R., Norton G. “AVTIS: a novel millimetre-wave ground based instrument for volcano remote sensing”. Geophysical Research Abstracts, Vol. 6, 2004.
[JCH03] van den Heuvel J.C., Kleijweg J.C.M., van der Mark W., Lievers C.M. and Kester L.J.H.M. “Obstacle detection for people movers using vision and radar”. In Proceedings 10th World Conference on Intelligent Transport Systems and Services, Madrid, Spain, 16-20 November 2003.
[LDW91] J. Leonard and H.F. Durrant-Whyte. Simultaneous map building and localization for an autonomous mobile robot. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, pages 1442--1447, Osaka, Japan, 1991.
[MC89] P. Moutarlier and R. Chatila. Stochastic multisensory data fusion for mobile robot location and environment modelling. In 5th International Symposium on Robotics Research, pages 85--89, Tokyo, 1989.
[MS05] Sato M., Zheng-Shu Z., Hamasaki T., and Boerner W.M. “Development of a Ground-Based Synthetic Aperture Radar (GB-SAR) System and its applications to environment monitoring and disaster prevention”. The 2nd International Workshop on Applications of Polarimetry and Polarimetric Interferometry (POLinSAR 2005), 6 pages, Italy, 2005.
[SC87] R. Smith and P. Cheeseman. On the Estimation and Representation of Spatial Uncertainty. International Journal of Robotics Research, 5(4), 56--68, 1987.
Références paragraphe C-4
[1] S. Clark and G. Dissanayake, "Simultaneous localization and map building using millimeter wave radar to extract natural features". In IEEE Int. Conf. on Robotics and Automation, pp. 1316–1321, Detroit, Michigan, May 1999.
[2] G. Dissanayake, P. Newman, H.F. Durrant-Whyte, S. Clark, M. Csobra, "A solution to the simultaneous localization and map building (SLAM) problem". IEEE Trans. Robotics and Automation, 17(3), pp. 229-241, 2001.
[3] A. Howard, “Real-time stereo visual odometry for autonomous ground vehicles,” in IEEE/RSJ Int. Conf. on Intelligent Robots and Systems - IROS, 2008, pp. 3946–3952.
[4] B. Kitt, A. Geiger, and H. Lategahn, “Visual Odometry based on Stereo Image Sequences with RANSAC-based Outlier Rejection Scheme,” in IEEE Intelligent Vehicles Symposium, San Diego, USA, June 2010.
[5] D. Nistér, O. Naroditsky, and J. Bergen, “Visual odometry for ground vehicle applications,” Journal of Field Robotics, vol. 23, 2006.
[6] B. Williams and I. Reid, “On combining visual slam and visual odometry,” in Proc. Inter. Conf. on Robotics and Automation - ICRA, 2010.
[7] A. Pretto, E. Menegatti, M. Bennewitz, W. Burgard, and E. Pagello, “A visual odometry framework robust to motion blur,” in Proceedings of the 2009 IEEE Inter. Conf. on Robotics and Automation, ser. ICRA’09, 2009, pp. 1685–1692. CemOA : archive ouverte d'Irstea / Cemagref
-< * ! ! 1 ! 2 3 4 2 5 6 2 : ## 1 $ "!" $1 # =# 1 & % 1 G; 2 2 5 : $" $ # '$ ; 2 5 7 2 2 &
6 & H " A ' 0 & & % % % $$ ( /#% " " % '" : > # ; 6 " $ & H "!" $ % " $% ( I!3 . % 4 & A ' 0 & & % " $% "!" $ % " $% ( % $" % > * & A ! ! # " % $" " =# ( % $" " & : & $ " " ; > 5 & A ' 0 & & % % $$ % % $$ ( % $" % 6> 4> + ## " $ ## ( % $" % 7 3 82 ! 9! ! 4 %9 $ ## & $2 ##$"! " C # " & & % % $$ & & "!" $ % $" % > & ! " & $2 ##$"! " & & % % $$ & & "!" $ % $" % * %9 $ ## & $ 9 $$ ##$"! " C # " & & % " $% & & "!" $ % $" % 5 & ! " & $2 ##$"! " & & % % $$ & & "!" $ !3 9% (" 6> 4> + ## " $ ## % $" % 7 % :; 2 5 : 3 9 : 5 2 ! < , !=
4> * %(" " " & #$ &2 " $ ' $ ("!3 &2 " % $" % " &2" ( ! & & &
$ = J > # ## ( I!3 . % 4 # !0 " " " & # > # "!" $ ( I!3 . % # # > # "!" $ I!3 . % 4 * % " /#% " " &% & &
& "0 8 / & & % ( /#% " " $ 7"$$ : > # ; * * % " /#% " "
&% & & & "0 8 & & % ( /#% " " F = ! : > # ; CemOA : archive ouverte d'Irstea / Cemagref
2 3 4 2 5 6 2 : ## 1 $ "!" $1 # =# 1 & % 1 G; 2 2 5 : $" $ # '$ ; 2 5 * 5 % " /#% " " &% & &
& 8 & & % ( /#% " " = : > # ; $ &2 " /#% " " & = "!3 &2 " I!3 . % 6> 4> * + ## " $ ## % $" % 7 - 2 2; - 5 %(" " " & '. ! "( #%!"("! " : % " &%' & # . ; ## ( % $" % -> 5 & # . ( % $" % -> 5 * % " & ! &" " !" "("0 !3 "0 # & & % " ( 6 % " & # . $ "# " 6> 5 5 ## &2 9 ! '$"! " ## ( % $" % 6 5 + "! " ? ! % " " K " K ' ( % $" % " ( # " ! + >3 82 5 3 2 2 5 >3 82 5 2 2 5 2 23 4 5 ? 8 : 3 8 4 2; 5 8@2 5 + 4 2; 82 5 <8 : 8 = 5 : ; + : (; 2 8 4 5 ? 8 : 3 8 4 2; 5 8@2 5 + 4 2; 82 5 <8 : 8 = * : (; 8 5 5 83 5 4 3;2 52 : 8 5 4 3;2 52 * : (; 5 ! " & #L$ CemOA : archive ouverte d'Irstea / Cemagref
4< * > * 2 : 5 8 2 5 <423 52 5 24: : 5 >2>3 5= 4 5 2 2 A > 5 4 2 2 A 8 5 + > 4 5 2 2 A > 5 4 2 2 A 8 5 + > 8 8 5 + A 3 2 < > 9 8 55 = :2 5 + 5 5 552 2; 4 2 A 5 8 332> 2 5 . : ! ; . > F : ; 33 B 5 58 B 5 > " " & $ ! (% ! : $ > &; 5 < :8 5 = # ! ! " ! " !
Conférences Internationales à Comité de lecture
[IMP-1] P. Checchin, F. Gérossier, C. Blanc, R. Chapuis, and L. Trassoudaine, “Radar Scan Matching SLAM using the Fourier-Mellin Transform”, in The 7th Inter. Conf. on Field and Service Robots (FSR), Cambridge, Massachusetts, USA, Jul. 2009.
[IMP-2] F. Gérossier, P. Checchin, C. Blanc, R. Chapuis, and L. Trassoudaine, “Trajectory-oriented EKF-SLAM using the Fourier-Mellin Transform applied to Microwave Radar Images”, in IEEE/RSJ Inter. Conf. On Intelligent Robots and Systems (IROS), St Louis, Missouri, USA, Oct. 2009.
[IMP-3] D. Vivet, P. Checchin, and R. Chapuis, “Line-based SLAM with Slow Rotating Range Sensors: Results and Evaluations”, in The 11th IEEE Inter. Conf. on Control, Automation, Robotics and Vision (ICARCV’10), Singapore: IEEE Computer Society, Dec. 2010.
[IMP-4] D. Vivet, P. Checchin, and R. Chapuis, “On the fly Localization and Mapping using a 360° Field-of-View Microwave Radar Sensor”, in Proc. of the 3rd Inter. IROS 2009 Workshop on Perception and Navigation for Intelligent Vehicles, U. Nunes, C. Laugier, and A. Broggi, Eds., St Louis, Missouri, USA, Sep. 2009.
[IMP-5] Monod M.O., Faure P, Rouveure R., “Intertwined linear frequency modulated radar and simulator for outdoor robotics applications”, IEEE International Conference on radar systems, (RADAR'09), Bordeaux, France, Oct. 12-16, 2009.
CemOA
: archive
ouverte
d'Irstea
[IMP-6] Rouveure R., Monod M.O., Faure P, “High resolution mapping of the environment with a ground-based radar imager”, IEEE International Conference on radar systems, (RADAR'09), Bordeaux, France, Oct. 12-16, 2009.
[IMP-7] Rouveure R., Monod M.O., Faure P., "Mapping of the environment with a high resolution ground-based radar imager", 14th IEEE Mediterranean Electrotechnical Conference, MELECON'2008, Ajaccio, France, May 5-7, 2008.
[IMP-8] Rouveure R., Monod M.O., Faure P, "Radar imager for perception and mapping in outdoor environments", ACIVS 2009, Advanced Concepts for Intelligent Vision Systems, Bordeaux, France, Oct. 2009.
[IMP-9] Rouveure, R., Faure, P. and Monod, M.O., “A new radar sensor for coastal and riverbank monitoring", IEEE European Conference on Ocean and Coastal Observation: Sensors and observing systems, numerical models & information Systems (OCOSS 2010), Brest, France, June 21-23, 2010.
[IMP-10] Rouveure, R., Checchin, P., Faure, P., Monod, M.O., Simultaneous localization and map building using sensor in extensive outdoor environment: First results, 2007 IEEE International Conference on Robotics and Automation, ICRA2007, Workshop on Perception, Planning and Navigation for Intelligent Vehicles, Roma, Italy, 10-17 April 2007, 6 p.
[IMP-11] Rouveure, R, Faure, P., Checchin, P., Monod, M.O., Mobile robot localization and mapping in extensive outdoor environment based on radar sensor – First results, PSIP 2007 Physics in Signal and Image Processing, Mulhouse, France, Jan. 31 – Feb. 2, 2007, 6 p.
Conférences Nationales
[IMP-12] Vivet D., Gérossier F., Checchin P., Chapuis R., Monod M.O., Faure P., Rouveure R., Morillon J., "IMPALA, radar panoramique hyperfréquence pour la localisation et la cartographie dynamiques simultanées en environnement extérieur", Symposium international Innovation Technologique et systèmes de Transport (ITT'09), Paris, France, 26-29 octobre 2009.
[IMP-13] Rouveure, R., Faure, P. and Monod, M.O., “Radar-based SLAM without odometric sensor" , ROBOTICS 2010, International Symposium on Mobile Robotics for Environment and Agriculture, Clermont-Ferrand, France, September 3-4, 2010.
[IMP-14] Faure P., Monod M.O., Rouveure R., "Imageur radar panoramique pour la cartographie locale de l'environnement", SAGEO'2008, 24-27 juin 2008, Montpellier, France.
[IMP-15] Rouveure, R., Faure, P. and Monod, M.O., “Un imageur Radar pour la perception et la caractérisation en milieu naturel", in Proceedings of C2I 2010, 5ème colloque interdisciplinaire en Instrumentation, January 26-27, 2010, Le Mans, France.
CemOA
: archive
ouverte
d'Irstea
< *
#% ! ! ! 1 !
Nouveaux projets collaboratifs
Les retombées potentielles du projet dans le domaine environnemental, notamment la cartographie pour le suivi morphologique des cours d’eau, ont été découvertes durant le projet. Un financement FEDER (Région Auvergne) a permis une exploration de ce secteur avec des essais réalisés à bord d’une embarcation sur des rivières et des lacs. La campagne de mesure a été menée avec la participation d’une start-up (VEODIS-3D) spécialisée dans les relevés topographiques de cours d’eau. Les premiers résultats obtenus montrent l’intérêt que peut apporter le radar pour dimensionner un chenal, identifier les berges ou suivre des travaux de reméandrement, dans des sites ou les masquages GPS sont fréquents. Parmi les intérêts potentiels majeurs du système, on notera l’automatisation des relevés topographiques, le gain de temps réalisé par l’opérateur et la simplicité de mise à jour de cartes locales.
C’est la raison pour laquelle un projet (PELICAN) a été déposé à l’appel d’offre Emergence 2010 de l’ANR. Ce projet vise à : 1) explorer plus avant les applications environnementales, 2) réaliser une étude de marché pour définir le champ d’application global de la technologie et impliquer une entreprise dans la phase finale.
Dans le cadre des programmes ERA-NET un projet ICT-AGRI a été déposé en 2010. Le projet dénommé QUAD-AV (Ambient Awareness for Autonomous Agricultural Vehicles) coordonné par le Danish Technological Institute, associe la France, l’Allemagne, l’Italie et le Danemark dans l’objectif de développer les capteurs nécessaires à l’augmentation de la sécurité et de l’autonomie des véhicules agricoles. Pour la France (Cemagref), les travaux porteront notamment sur la détection et la caractérisation des entités mobiles à l’aide d’un imageur radar.
Brevets
Une étude d’antériorité portant sur le capteur radar est en cours avec l’objectif de déposer prochainement un brevet.
Actions de Valorisation
On notera notre participation aux actions de valorisation organisées par le pôle de compétitivité ViaMéca qui a labellisé notre projet et nous apporte son aide dans la recherche de partenaires industriels.
Colloques scientifiques
Nous avons contribué à l’organisation de la conférence AgEng 2010 (International Conference on Agricultural Engineering) et au symposium associé ROBOTICS 2010 qui se sont tenus en septembre 2010 à Clermont-Ferrand (France).
CemOA
: archive
ouverte
d'Irstea
#- !" 1 ! ! ! " ! <, ! ! & !=
Les données recueillies pourront faire l’objet d’une demande de mise à jour par l’ANR jusqu’à 5 ans après la fin du projet.
Identification Avant le recrutement sur le projet Recrutement sur le projet Après le projet
Nom et prénom Sexe H/F Adresse email (1) Date des dernières nouvelles Dernier diplôme obtenu au moment du recrutement Lieu d'études (France, UE, hors UE) Expérience prof. Antérieure, y compris post-docs (ans) Partenaire ayant embauché la personne Poste dans le projet (2) Durée missions (mois) (3) Date de fin de mission sur le projet Devenir professionnel (4) Type d’employeur (5) Type d’emploi (6) Lien au projet ANR (7) Valorisation expérience (8) Vivet Damien H damien.viv et@univ-bpclermont. fr
A ce jour Ingénieur France LASMEA Doctorant 36 Décembre
2011 Encore sur le projet enseignement et recherche publique
Doctorant LASMEA Vers l’obtention d’un doctorat Gérossier Franck H gerossier@ univ-bpclermont. fr A ce jour Agrégation Génie Electrique France PRAG Génie Electrique Université Blaise Pascal LASMEA Doctorant (PRAG bénéficiant d’un aménagem ent de service) 52 Décembre 2011 PRAG Génie Electrique Université Blaise Pascal enseignement et recherche publique PRAG Génie Electrique Université Blaise Pascal LASMEA Vers l’obtention d’un doctorat Damez Lionel H damez@un iv-bpclermont. fr
A ce jour Ingénieur France Ingénieur (3 ans)
LASMEA Ingénieur 3 Juillet 2010 CDD enseignement et
recherche publique Ingénieur LASMEA Pradelle Maxime H Prad.maxi me@gmail. com A ce jour Niveau ingénieur France Niveau ingénieur (2 ans) LASMEA Niveau ingénieur 2 Novembre 2010 CDD enseignement et recherche publique
Niveau ingénieur LASMEA
(1) Adresse email : indiquer une adresse email la plus pérenne possible
(2) Poste dans le projet : post-doc, doctorant, ingénieur ou niveau ingénieur, technicien, vacataire, autre (préciser)
(3) Durée missions : indiquer en mois la durée totale des missions (y compris celles non financées par l’ANR) effectuées sur le projet
(4) Devenir professionnel : CDI, CDD, chef d’entreprise, encore sur le projet, post-doc France, post-doc étranger, étudiant, recherche d'emploi, sans nouvelles
(5) Type d’employeur : enseignement et recherche publique, EPIC de recherche, grande entreprise, PME/TPE, création d’entreprise, autre public, autre privé, libéral, autre (préciser) (6) Type d’emploi : ingénieur, chercheur, enseignant-chercheur, cadre, technicien, autre (préciser)
CemOA
: archive
ouverte
d'Irstea
*< * (7) Lien au projet ANR : préciser si l’employeur est ou non un partenaire du projet
(8) Valorisation expérience : préciser si le poste occupé valorise l’expérience acquise pendant le projet.
Les informations personnelles recueillies feront l’objet d’un traitement de données informatisées pour les seuls besoins de l’étude anonymisée sur le devenir professionnel des personnes recrutées sur les projets ANR. Elles ne feront l’objet d’aucune cession et seront conservées par l'ANR pendant une durée maximale de 5 ans après la fin du projet concerné. Conformément à la loi n° 78-17 du 6 janvier 1978 modifiée, relative à l'Informatique, aux Fichiers et aux Libertés, les personnes concernées disposent d'un droit d'accès, de rectification et de suppression des données personnelles les concernant. Les personnes concernées seront informées directement de ce droit lorsque leurs coordonnées sont renseignées. Elles peuvent exercer ce droit en s'adressant l'ANR (http://www.agence-nationale-recherche.fr/Contact). CemOA : archive ouverte d'Irstea / Cemagref