LE 1).tfFERENTtE.L "HE.RCtE.R"
J.M. HUET (Lycée CHAPTAL, 75008 PARIS)
INTRODUCTION .
Le lecteur pourra trouver une étude complète ( cinématique, énergétique ) des engrenages paradoxaux qui sont à la base de ce génial différentiel MERCIER (du nom de son inventeur, ingénieur à la direction des études chez RENAULT ) -voir figures 2 et 3 -dans les revues n° 55 et 56 de l'A.P.T.E.P. (Association des Professeurs de Technologie de l'Enseignement Public).
L'auteur remercie Mrs Chahmirian et Mercier , de la régie Renault, pour leur aide et leur suivi tout au long de notre étude à l'E.S.T.A.C.A. qui a permis la rédaction de ces articles sur un engrenage nouveau, dérangeant, utilisant pourtant les lois classiques (frottement, glissement ) de cette "vieille" mécanique qui apporte encore sa contribution aux audaces techniques des mécanismes d'aujourd'hui.
Le but de cet article est de montrer que ce différentiel MERCIER " à frottement sec " est un différentiel à transfert de couple particulièrement performant au regard du TORSEN - voir figure 1.
BREVE PRESENTATION DES ENGRENAGES PARADOXAUX
Non, ce n'est pas un paradoxe : Jacques MERCIER a bien inventé des engrenages extérieurs à développante de cercle qui tournent dans le même sens. Ces engrenages paradoxaux, impérativement à dentures hélicoïdales, présentent les caractéristiques suivantes :
- le segment de conduite se trouve sur la tangente extérieure aux cercles de base, contrairement à l'engrenage classique où l'engrènement se produit sur la tangente intérieure,
- Z = 1 ou 2 ou 3 dents sont possibles: le pignon à 2 dents réalise un très bon compromis et sera utilisé dans le différentiel MERCIER (voir figure 10 :planétaire P4/ 4 satellites S1 à 90°),
- le contact entre 2 dents s'établit avec frottement, mais à 1 vitesse de glissement toujours CONSTANTE, d'où une perte d'énergie interne ingénieusement mise à profit dans un différentiel à transfert de couple,
- enfin, il est assez facile de démontrer ( théorème de l'énergie-puissance ) que le rendement n'est fonction que de .r~ntraxe relatifa/2rb et du coefficient de frottementf(pourf= 0.15, et 2< a/2rb < 3.5, on obtient: 0.31 <rendement
< 0.54).
figure 1
Le différentiel TORSEN
figure 2
Le différentiel MERCIER
figure 3
Le différentiel MERCIER
LE DIFFERENTIEL MERCIER
On le considère en tant que différentiel gauche- droite (c'est à dire sur l'essieu moteur). 1 : Fonctionnement en ligne droite
Les roues ont la même adhérence et ont la même vitesse. Le couple moteur est transmis au boîtier via la couronne, ce qui entraîne les quatre satellites. Si on isole une partie de l'engrènement, par exemple le côté engrenage paradoxal
aptep-info
N°79 -Jv-Fév
1999 14Sl-P4 (cf figure 4), on constate que le satellite va rouler autour du planétaire; le satellite va donc se mettre à tourner dans le sens inverse de celui du boîtier. Si on isole maintenant l'autre côté de l'engrènement (engrenage à denture normale S2-P3 sur le schéma), on constate que le satellite va se mettre à tourner dans le même sens que le boîtier. Donc en considérant le différentiel complet (c'est à dire les deux engrènements précités), les satellites, liés entre eux, ne peuvent pas tourner en sens inverse ; l'ensemble se bloque et il n'y a pas de mouvement relatif entre les satellites et les planétaires, donc l'ensemble tourne à la vitesse du boîtier.
Le couple reçu par chacune des roues est calculé de la manière suivante :
soit Cm le couple moteur, Cl le couple reçu par la roue gauche (côté engrenage paradoxal) et C2le couple à la roue droite. N2 représente le nombre de dents du pignon S2 et N3 celui de P3.
4 satellites « paradoxaux » à go• : S 1 4 satellites « classiques » à go• : S2
. planétaire 4:paradoxal » P4 figure 4 SCHEMA EN COUPE DU DIFFERENTIEL MERCIER couronne de différentiel On aboutit au système Cm= Cl +C2 C2 = Cl
*
N2/N3 d'où Cl = Cm*
N2 1 (N2 + N3) et C2 = Cm*
N3 1 (N2 + N3) Si la répartition est de 50/50 (N2 = N3), on aura Cl=
C2=
Cm 1 2.Cette configuration se retrouve lorsque le système est monté en différentiel avant ou arrière. En différentiel central, il suffit de modifier N2 et N3 pour obtenir la répartition souhaitée. Le résultat de cette répartition de couple en termes de vitesse s'exprime de la manière suivante. Soient: Wbo la vitesse absolue du boîtier
W20 la vitesse absolue de S2
W2b la vitesse relative de S2/boîtier.
aptep-info
N°79 -Jv-Fév
1999fllanétaire « classique » P3
La vitesse de rotation des roues est donnée par : W30 = W32 + W2b + WbO.
En ligne droite, étant donné que l'ensemble du différentiel tourne en bloc, on a W2b
=
0 et W32=O.
D'où W30=
WbO. De même, W40
=
WbO.2 : Fonctionnement en virage
Les deux roues ne tournent plus à la même vitesse. Prenons un virage à gauche (cf. figure 5 ci-dessous) : la roue extérieure doit parcourir une distance plus importante par rapport à la roue ga,uche.
Il va se générer sur l'arbre extérieur un couple "moteur" et un couple "résistant" sur l'autre.
'l'
; !
figure 5
Véhicule en virage
création d'un couple différentiel gauche/droite
Le comportement du différentiel MERCIER est décrit ci-dessous.
51 52 boitier b
roue intérieure Wg roue extérieure Wd
P3
Le couple moteur exercé par la roue extérieure fera tourner les pignons S2 et P3 dans le sens indiqué sur le schéma. On aura W3b
=
Wd (vitesse imposée par la trajectoire de la roue, par rapport au boîtier) et, W2b=-
W3b. Le satellite S 1 étant lié par son axe au satellite S2, il tourne dans le même sens et entraîne le pignon P4 à la vitesse W2b (conservation du sens de rotation entre Sl et P4). On a donc W4b=-
W3b. La roue intérieure tourne bien dans le sens inverse de la roue extérieure. La fonction différentielle est donc assurée.Le système étudié étant monté en différentiel de pont, son rapport est de 50/50. Les vitesses absolues des roues seront W30 = WbO + W3b
W40
=
WbO+
W4b=
WbO -W3b.3: Différence d'adhérence gauche/droite
La :figure 7 ci-dontre montre le résultat obtenu en faisant circuler le pignon dit paradoxal 1 suivant le sens indiqué,
sur son homologue 2 encastré dans le bâti. ·
Le mauvais rendement résultant de cet engrènement a pour conséquence de générer un couple C au niveau de l'arbre du pignon 2. Sur véhicule, l'un des bâtis sera remplacé par une roue. Nous étudierons les conséquences de ce résultat par la suite.
.. ,
figure 7
sens de rotation appliqué 001
2 1
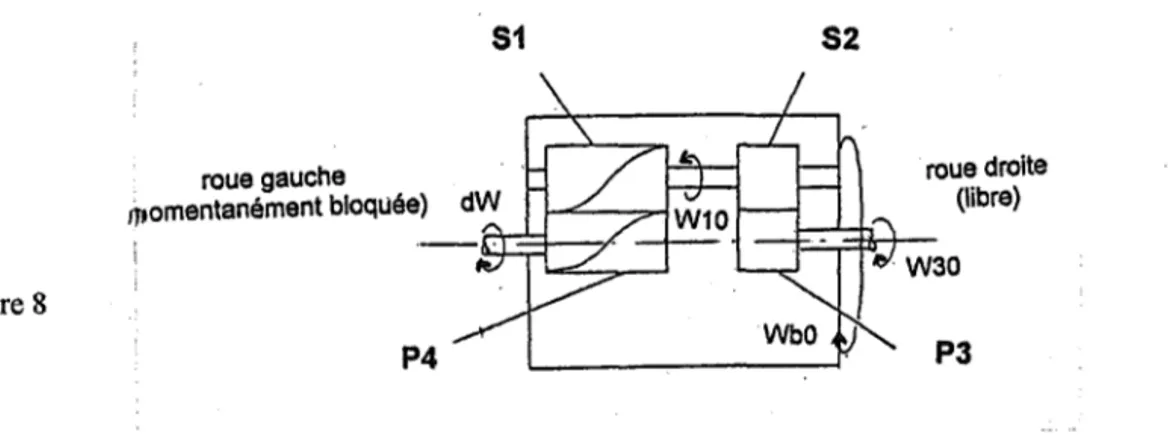
Reportons-nous au schéma en coupe du différentiel :MERCIER. On supposera pour l'étude que la roue droite est sur sol glissant (vergll1S) tandis que la roue gauche repose sur le bitume. Lors d'une accélération, un véhicule équipé d'un différentiel classique se trouverait immobilisé.
La solution que propose le différentiel à engrenage paradoxal réside dans la propriété suivante : Soit WbO la vitesse de rotation du boitier.
figure 8 roue gauche momentanément bloquée) P4 S1 S2 roue droite (libre) P3
La roue gauche, laquelle oppose un couple résistant, se trouve momentanément immobile. Le pignon SI, entraîné par le boîtier en rotation va circuler autour du pignon P4 à la vitesse initiale WlO(init) :
WlO(init)
=
Wlb + WbO ou Wbo représente la vitesse d'entraînement de Sl et Wlb sa vitesse relative. Or Wlb=
W4b (les pignons Sl et P4 tournent dans le même sens à la même vitesse par rapport au boîtier). Donc Wlb= -
Wb4= -
WbO car le pignon P4 est fixe.D'où WlO(init) = -WbO + WbO =O.
On se trouve alors dans le cas représenté par le schéma ci-dessus. Un couple moteur va donc être créé au niveau de l'arbre reliant le pignon P4 à la roue gauche. Soit dW la vitesse résultant de la création de ce couple moteur :
W40=dW
Au niveau du pignon Sl, on aura WlO = Wlb + WbO.
OrWlb= W4b= dW +WOb= dW- Wbo
Autrement dit, celui-ci sera freiné par rapport au boîtier (conséquence du mauvais rendement d'engrènement). D'où WlO=dW.
Les pignons S 1 et S2 étant liés : W20 = WlO = dW.
De plus, W30 = W3b + WbO.
Dans le cas d'engrenages classiques (inversion du sens de rotation) : on a W3b = - W2b
donc W3b = -W20
+
WbO.On obtient alors W30 =- W20 + 2*Wb0, et comme W20 = dW :
W30
=
-dW+
2*WbO.et W40=
dW.L'arbre P3 tournera donc dans le même sens que le boîtier, dans le même sens que le pignon P4.
On constate que, comme dans le cas d'un différentiel classique, la roue non adhérente tournera très vite. Le mauvais rendement· de l'engrenage paradoxal limitera cette vitesse tout en entraînant la roue motrice qui permettra au véhicule d'avancer.
W 40 dépend de la répartition des couples gauche/droite et de l'accélération du véhicule qui seront calculés ultérieurement.
4 : Dans le
cas
contraire (roue droite adhérente).(cf. figure 9), le pignon S2 circulera autour de P3 à une vitesse initiale W20.
W20
=
W2b + WbO ou W2b=
-W3b (inversion des sens de rotation) or W3b=-
WbO (roue droite bloquée) Donc W20 = 2*Wb0 et WlO = 2*Wb0.Comme Wlb = W2b (pignons Sl et S2 liés), Wlb = WbO, et comme le sens de rotation est conservé entre les pignons Sl etP4,
Wlb=W4b.
Donc W4b = WbO, et WbO = W40 + WOb soit W40 = 2*Wb0.
La rotation du pignon Sl sur le pignon P4 génère une perte de vitesse (dW) des satellites due au mauvais rendement de l'engrenage. .
Il en résulte une nouvelle valeur pour W40 : W40 = 2*Wb0- dW. Par conséquent, on aura WlO = 2*Wb0 - dW = W20.
La vitesse induite à la roue droite initialement bloquée sera
W30 = W3b + WbO = -W2b + WbO =-(W20 + WOb) + WbO = -W20 + 2*Wb0 soit W30 = dW et W40 = 2*Wb0- dW.
Le différentiel se comporte de la même façon que ce soit la roue gauche ou droite bloquée.
La roue reposant sur le sol adhérent sera donc entraînée et le véhicule pourra avancer (cf. schéma )
roue gauche (libre) P4 81 S2 roue droite (momentanément bloquée)
~~
. P3aptep-info N°79- Jv-Fév 1999
18Remarque : les variations de vitesses exprimées lors de ces explications sont générées par des couples résistants au niveau de l'engrenage paradoxal et provoquent des transferts de couples.
COMPARAISON DES
DIFFERENTIE~TORSENET MERCIER
Nous avons évoqué lors de l'étude du TORSEN les difficultés de réalisation que pose ce différentiel.
Le différentiel MERCIER est composé de seulement 10 pignons ( 4 satellites et 1 plànétaire dits paradoxaux ainsi que 4 satellites et 1 planétaire classiques) tandis que le TORSEN en comporte 20 (3 équipages de satellites composés chacun de 2 pignons à dentures hélicoïdales et 4 à dentures droites ainsi que de 2 planétaires appelés vis sans fin). Le nombre important de pièces composant le TORSEN impose un encombrement et une masse supérieure.
Lorsque ces différentiels sont montés en position centrale, on souhaite généralement obtenir une répartition bien précise du couple entre l'essieu avant et l'essieu arrière pour définir le comportement du véhicule.
Sur le différentiel :MERCIER, cette répartition est obtenue en modifiant le nombre de dents des engrenages classiques. Soit N2 le nombre de dents des satellites à dentures droites et N3 celui du planétaire correspondant. Si l'on considère que le couple moteur (Cm) entre par le boîtier et sort sur l'arbre avant relié au planétaire paradoxal par le couple Cl et par C2
sur
l'arrière, on a (cf. § "ligne droite"): ·Cl = Cm * N2 1 (N2 + N3) et C2 = Cm * N3 1 (N2 + N3).
La répartition avant/arrière souhaitée est obtenue très facilement puisqu'il suffit d'agir sur la taille d'engrenages à dentures droites et que le surcroît de volume occasionné par de grands satellites n'est pas très important. De plus, le montage du différentiel pouvant être inversé (pignon paradoxal relié à l'avant ou à l'arrière indifféremment), il suffit de choisir le sens du montage de manière à avoir Nl inférieur à N2. Dans cette configuration, le volume du boîtier sera déterminé par l'encombrement des pignons paradoxaux dont le rapport est obligatoirement 1/1.
Si l'on a par exemple Nl = 16 dents et N2 = 24 dents, la répartition est de: Cl
=
Cm * 16 1 40 = 0.4 * Cm et C2 =Cm* 24 1 40 = 0.6 * Cm.Sur le différentiel TORSEN, l'obtention de la répartition souhaitée est beaucoup moins aisée et plus limitée car il faut modifier la taille du système pignon à denture hélicoïdale 1 vis sans fin. De ce fait, la répartition maximale est de 47/53.
Du point de vue de la comparaison des performances, nous avons déterminé l'accélération potentielle d'un véhicule équipé du :MERCIER et d'un véhicule équipé du TORSEN lorsque seulement une roue est adhérente, les deux différentiels étant montés sur l'essieu moteur.
D Différentiel MERCIER
Dans le cas où le différentiel est sollicité par une différence de vitesse entre les 2 arbres de sortie, la sortie rapide dont la vitesse est supérieure à celle du boîtier voit son couple transiter par l'engrenage paradoxal. Ce dernier, compte tenu de son rendement constitue un frein imparfait et il y a report de couple de l'élément rapide vers l'élément lent. Soit par exemple C2 le couple coté lent (roue adhérente reliée à l'engrenage classique) et Cl le couple coté rapide (roue qui s'emballe). Le couple Cl est affecté du rendement n de l'engrenage paradoxal. Le couple effectif pour chacune des roues est alors :
coté lent coté rapide ·
C'2 =Cm* C2/(C2
+
n.Cl) C'l = Cm* n.Cl/(C2+
n.Cl) Calcul de l'accélération maximaleOn se fixe les valeurs suivantes : -Cm= 10 mkg,
-rapport de démultiplication D = 13,
rayon de la roueR= 0.3 rn,
-masse du véhlcule M =1000 kg (on négligera les forces de roulement ainsi que les forces aérodynamiques). Le rapport du différentiel étant de 50/50, on a
Cl = C2 = Cm/2 d'où C'2 = Cm 1 (l+n). Le principe fondamental de la dynamique nous donne l'équation M
*
A*
R = C'2 * D où A représente l'accélération du véhlcule,donc A= C'2
*
D/(M * R).Application numérique : C'2 = 70 Nm et A = 3 m/s2.
Dans le cas où la roue reliée à l'engrenage paradoxal se trouve sur sol adhérent et l'autre sur de la glace, la répartion de couple se fait de la manière suivante :
coté lent C'l =Cm* Cl/(Cl + n.C2), coté rapide C'2 =Cm
*
n.C2/(Cl + n.C2)En imposant Cl= C2 = Cm/2, on obtient C'l =Cm 1 (l+n). L'accélération est donc identique au cas précédent.
D
DifférentielTORSEN
L'expérimentation nous a fourni les relations suivantes : -roue gauche adhérente C'2 = 3.5
*
C'l, or C'l + C'2 =Cm d'où C'2 + C'2 /3.5 =Cmsoit, après application numérique: C'2 = 77,7 Nm et A= 3.77 m/s2. - roue droite adhérente C'l = 2
*
C'2soit C'l = 66.6 Nm et A= 2.88 m/s2.
On constate que le fonctionnement du TORSEN est dissymétrique ce qui occasionne un comportement plus sous-vireur de la part du véhlcule lors d'un virage à droite que lors d'un virage à gauche.
Du point de vue des performances, ces deux systèmes sont très proches car ils permettent des accélérations similaires. D'une manière générale, ces deux différentiels qui transfèrent le couple de la roue la plus rapide vers la plus lente posent un problème en entrée de virage. En effet, la roue lente se trouve être la plus délestée et le surcroît de couple qu'elle reçoit risque de la faire patiner, ce qui entraîne une perte de motricité. De plus, lorsque cette roue conserve de l'adhérence, il se crée un couple tendant à remettre les roues en ligne droite.
Ces deux mécanismes sont donc montés principalement en différentiel central.
CONCLUSION
Il existe des inventions mineures et d'autres qui incontestablement introduisent une révolution dans les concepts de la mécanique. Nous sommes manifestement devant l'une d'entre elles. Cependant, il convient de limiter cet excès d'euphorie ; en effet ce différentiel malgré toutes ses qualités ne pourra jamais résoudre les multiples problèmes que peut poser la transmission de la puissance d'une automobile. Il faudrait pour cela avoir recours a un différentiel géré électroniquement, mais un tel système serait beaucoup plus compliqué.
La simplicité du MERCIER, engendrant un faible coût de production, un poids réduit et un encombrement minimum, en fait un concurrent sérieux face aux différents systèmes plus complexes (TORSEN, ZF ... ).
Toutefois, la production en série nécessite une certaine notoriété qui manque à une invention aussi récente.