BANC DE CARACTERISATION POUR LENTILLES
PANORAMIQUES
Mémoire présenté
à la Faculté des études supérieures de l'Université Laval dans le cadre du programme de maîtrise en physique pour l'obtention du grade de Maître es sciences (M.Sc.)
DEPARTEMENT DE PHYSIQUE, DE GENIE PHYSIQUE ET D'OPTIQUE FACULTÉ DES SCIENCES ET DE GÉNIE
UNIVERSITÉ LAVAL QUÉBEC
2011
Résumé
Les particularités des lentilles panoramiques font de leur caractérisation un défi. Pour les applications de vision, une connaissance de la distorsion est essentielle pour produire des vues naturelles. Aussi, toutes les directions étant importantes, la qualité de l'image doit être uniforme sur tout le champ de vue. Nous avons donc développé un banc de caractérisation pour lentilles panoramiques. Avec des cibles référencées, nous avons obtenu avec rapidité et facilité les profils de distorsion, ce qui a permis de calculer la résolution instantanée linéaire sur tout le champ de vue. Également, des cibles inclinées ont été utilisées pour déterminer la fréquence spatiale où la MTF est de 50% en fonction de l'angle dans le champ de vue. À l'aide de deux caméras, nous avons testé deux lentilles panomorphes et deux lentilles fisheyes pour lesquelles nous avons calculé la résolution instantanée et les courbes de MTF et comparé certains résultats à des simulations.
Abstract
Panoramic lenses' characteristics are unique and their characterization can be a challenge. For vision applications like security or inspection, a precise knowledge of the distortion introduced by panoramic lenses is essential to produce natural unwrapped views. Also, the image quality must be uniformed over the field of view because all directions are important. For these reasons, we have developed a dedicated testing setup for panoramic lenses and a quick and easy measuring process. Using referenced equally-spaced targets, we obtained the radial image mapping curves for various azimuthal angles, allowing us to calculate the instant full-field resolution map. Also, transition targets were used to find field-dependent spatial frequency where the MTF is 50%. We tested two panomorph lenses and two fisheyes with two different cameras. For each lens, we discussed the experimental resolution and MTF curves and compared some of those results to theoretical design data.
J'aimerais débuter par remercier mon directeur de recherche, le Professeur Simon Thibault, qui a cru en moi, m'a fait confiance et m'a supporté tout au long de mon projet de maîtrise. Travailler avec lui est un réel plaisir.
Je désire aussi remercier les membres du Laboratoire de Recherche en Ingénierie Optique en débutant par Pierre Désaulniers qui m'a patiemment aidé, tant en programmation qu'au laboratoire. Merci aussi à Jocelyn Parent pour les simulations sur ZEMAX®, à Hugo Lemieux dont les talents en programmation n'ont d'égal que son grand cœur, à Hugues Auger pour le support en laboratoire et à Jonathan LaBerge qui fait du bureau un endroit bien décoré et propice au bon travail. Finalement, je veux exprimer ma reconnaissance à Marie-Pier Côté, Sébastien Bouchard, Martin Larrivière-Bastien, Julie Mandar, Daniel Bouffard-Landry, Hu Zang et Christopher Lacharité-Mueller qui font du LRIO un groupe de recherche dynamique et stimulant.
La réalisation de mon projet de maîtrise n'aurait pu être possible sans le support du Département de physique, de génie physique et d'optique de l'Université Laval, du Centre d'Optique, Photonique et Laser et de la Chaire de recherche industrielle du CRSNG en conception optique. Je remercie également les techniciens Florent Pouliot et Jean-Paul Giasson pour leur minutie et leur efficacité.
Merci à mes amies Gabrielle Thériault et Véronique Zambon et aux gens du REPOL pour l'ambiance agréable qui règne au COPL.
Je tiens à exprimer toute ma gratitude à mes parents et à ma famille dont le support et les encouragements sont une source infinie de motivation. Milles mercis aux Copines pour les rires et les délires.
Finalement, j'aimerais remercier la compagnie Immervision qui nous a prêté des lentilles et fourni les fichiers de design ZEMAX® correspondants essentiels à la validation des mesures.
des choses très simples. Ce sont en effet des noms très célèbres que nous associons à l'explication de la trajectoire d'une pierre,
de la courbure d'une chaîne qui pend, des irisations dans une bulle ou des reflets dans une tasse. - D'ARCY THOMPSON
Table des matières
Résumé ii Abstract iii Remerciements iv Table des matières viii Liste des tableaux x Liste des figures xi
1 Introduction 1 1.1 Aperçu historique 1
1.2 Types de lentilles panoramiques 3 1.2.1 Téléphoto inversé ou rétrofocus 3
1.2.2 Fisheye 4 1.2.3 Lentille panoramique catadioptrique 5
1.2.4 Lentille panomorphe 6 1.3 Applications : 7 1.3.1 Surveillance 7 1.3.2 Conduite assistée 7 1.3.3 Divertissement 8 1.3.4 Communication 9 1.3.5 Inspection 9 2 Théorie 11 2.1 Quantités relatives aux systèmes optiques 11
2.2 Les aberrations optiques et leur impact 15 2.2.1 Aberrations monochromatiques 15 2.2.2 Aberrations chromatiques 21 2.2.3 Fonction d'étalement du point (PSF) 22
2.3 Caractéristiques des lentilles panoramiques 24
2.3.1 Lentilles panomorphes 25 2.4 Fonction de transfert de modulation (MTF) 27
2.4.2 Détermination de la MTF à l'aide d'un profil de contour 30
3 Banc de caractérisation 33 3.1 Description du montage expérimental 33
3.1.1 Cibles de résolution instantanée 35 3.1.2 Cibles de qualité d'image (MTF) 37
3.2 Précautions expérimentales 38 3.2.1 Positionnement de la caméra 38 3.2.2 Profil de luminosité 42 3.3 Composants optiques 44 3.3.1 Caméras 44 3.3.2 Lentilles 45 3.4 Méthodes d'analyse 48
3.4.1 Mesure de Vimage mapping et de la résolution instantanée 49
3.4.2 Mesure de la qualité d'image (MTF) 51
4 Résultats et discussion 57 4.1 Mesure de la résolution instantanée 57
4.1.1 Influence de la caméra sur la mesure de la résolution instantanée 58
4.1.2 Comparaison des profils de résolution instantanée 61 4.1.3 Comparaison avec des simulations à l'aide de ZEMAX® 62
4.1.4 Cartes de résolution instantanée 63 4.2 Mesure de la qualité d'image 68
4.2.1 Qualité d'image d'un système caméra-lentille 68
4.2.2 Mise au foyer 73 4.2.3 Ajustement de la caméra 75
4.2.4 MTF d'une lentille seule 75
5 Conclusion 81 Bibliographie 87 Annexe A : Algorithme 89
Tableau 1 : Comparaison des paramètres des caméras IQ-Eye 511 et AVT Guppy F-503 .45 Tableau 2 : Caractéristiques des lentilles utilisées pour le test du banc de caractérisation
Figure 1.1 : Un des premiers daguerréotypes panoramiques 2
Figure 1.2 : Schéma optique d'un rétrofocus 4 Figure 1.3 : Schéma optique d'une lentille de type fisheye 5
Figure 1.4 : Utilisation de miroirs dans des systèmes optiques panoramiques 5 Figure 1.5 : Photographie prise à l'aide d'un imageur panoramique catadioptrique 6
Figure 1.6 : Environnement immersif créé à l'aide d'images panoramiques 8 Figure 2.1 : Schéma présentant les différentes quantités présentes dans un système optique
12 Figure 2.2 : Position de la pupille d'entrée, de la pupille de sortie et du stop dans un
télescope simple 13 Figure 2.3 : Représentation de la profondeur de foyer et du blur spot 14
Figure 2.4 : Effets de l'aberration sphérique sur les rayons traversant un système optique. 16
Figure 2.5 : Effet du coma sur les rayons traversant un système optique 17 Figure 2.6 : Effet de l'astigmatisme sur les rayons traversant un système optique 18
Figure 2.7 : Effet de la courbure de Petzval sur les rayons traversant un système optique.. 19
Figure 2.8: Description schématique de la distorsion pincushion et en barillet 20 Figure 2.9 : Effet de l'aberration chromatique axiale sur des rayons de différentes longueurs
d'onde traversant un système optique 21 Figure 2.10 : Effet de l'aberration chromatique non-axiale deux rayons chefs de différentes
longueurs d'onde traversant un système optique 22 Figure 2.11 : Coupes horizontale et verticales d'une Point spread function expérimentale 23
Figure 2.12 : Effets de l'aberration sphérique, du coma et de l'astigmatisme sur la PSF ....23
Figure 2.13 : Image prise à l'aide d'un fisheye avant et après redressement 24 Figure 2.14 : Comparaison de la même scène photographiée à l'aide d'une lentille fisheye et
d'une lentille panomorphe 25 Figure 2.15 : Image prise à l'aide d'une lentille panomorphe avant et après redressement.26
Figure 2.16 : Schéma des zones de résolution instantanée augmentée de la lentille
Figure 2.17: Dégradation en contraste d'un patron périodique traversant un système optique
pour deux fréquences spatiales 28 Figure 2.18: Courbes de MTF obtenues pour la lentille panomorphe à l'aide du logiciel
ZEMAX® .' 29 Figure 2.19 : Cibles inclinées pouvant être utilisées pour obtenir la MTF d'un système
optique 30 Figure 2.20 : Schéma de l'obtention de la MTF à partir d'une fonction de contour 31
Figure 3.1 : Photographies du banc de caractérisation pour lentilles panoramiques 33 Figure 3.2 : Schéma du banc de caractérisation pour lentilles panoramiques 34 Figure 3.3 : Cibles utilisées pour la mesure de la résolution instantanée 35 Figure 3.4 : Image mapping d'un système caméra-lentille panomorphe 36 Figure 3.5 : Résolution instantanée pour un système caméra-lentille panomorphe 37
Figure 3.6 : Cibles utilisées pour mesurer la MTF radiale et azimutale 37 Figure 3.7 : Positionnement de la caméra par rapport au centre du montage 39 Figure 3.8 : Influence du déplacement de la caméra sur l'angle d'incidence 40
Figure 3.9 : Profils de luminosité des quatre lentilles testées 43
Figure 3.10 : Caméras utilisées pour les tests 44 Figure 3.11 : Lentilles utilisées pour les tests 46 Figure 3.12 : Images prises à l'aide des quatre lentilles testées 47
Figure 3.13 : Interface du programme d'analyse 48 Figure 3.14 : Zone d'intérêt pour le calcul de la résolution à l'aide du programme d'analyse
49 Figure 3.15 : Zone d'intérêt pour le calcul de la qualité d'image radiale et azimutale à l'aide
du programme d'analyse 52 Figure 4.1 : Résolution instantanée sur le grand axe de la lentille panomorphe IMV2733
mesurée à l'aide de deux caméras différentes 58 Figure 4.2 : Résolution instantanée sur le grand axe de la lentille panomorphe IMV2709
mesurée à l'aide de deux caméras différentes 59 Figure 4.3 : Résolution instantanée de la lentille Fujinon mesurée à l'aide de deux caméras
Figure 4.4 : Résolution instantanée de la lentille Sunex mesurée à l'aide de deux caméras
différentes 60 Figure 4.5 : Profils expérimentaux de résolution instantanée pour les quatre lentilles testées
61 Figure 4.6 : Profils de résolution instantanées obtenus expérimentalement et suite à des
simulations pour la lentille panomorphe IMV2733 sur le grand axe et le petit axe 63 Figure 4.7 : Schéma de la rotation d'une lentille pour obtenir une carte de résolution
instantanée 64 Figure 4.8 : Images prises pour différents angles de rotation d'une lentille panomorphe....65
Figure 4.9 : Carte de résolution instantanée expérimentale et théorique pour les lentilles
panomorphes 66 Figure 4.10 : Cartes de résolution instantanée pour les lentilles Fujinon et Sunex 67
Figure 4.11 : Profil de qualité d'image radiale des quatre lentilles testées dans un système
caméra-lentille 69 Figure 4.12 : Profil de qualité d'image azimutale des quatre lentilles testées dans un
système caméra-lentille 70 Figure 4.13 : Profils de qualité d'image radiale et azimutale pour le grand axe et le petit axe
de la lentille IMV2733 pour un système caméra-lentille 71 Figure 4.14 : Profils de qualité d'image radiale et azimutale pour le grand axe et le petit axe
de la lentille IMV2709 pour un système caméra-lentille 71 Figure 4.15 : Profils de qualité d'image radiale pour le grand axe de deux lentilles
panomorphes pour deux positions de mise au foyer pour un système caméra-lentille.73 Figure 4.16 : Profils de qualité d'image azimutale pour le grand axe de deux lentilles
panomorphes pour deux positions de mise au foyer pour un système caméra-lentille.74
Figure 4.17 : Profil de qualité d'image radiale pour les quatre lentilles testées 76 Figure 4.18 : Profil de qualité d'image azimutale pour les quatre lentilles testées 76 Figure 4.19 : Profils de qualité d'image radiale et azimutale pour le petit et le grand axe de
la lentille panomorphe IMV2733 seule 77 Figure 4.20 : Profils de qualité d'image radiale et azimutale pour le petit et le grand axe de
On oublie trop souvent le long chemin qui sépare l'appareil photo acheté au magasin d'électronique du coin du premier procédé de photographie présenté à l'Académie Française des Sciences par Daguerre au début de l'année 1839 (Daguerre, 1839). Ce procédé fut appelé daguerréotype. En plus d'un siècle et demi, l'art de la photographie s'est transformé au fil des nouveaux besoins des utilisateurs, jusqu'à mener de nos jours à la mise en marché d'appareils photo abordables et faciles d'utilisation permettant la prise de clichés numériques de très haute résolution instantanée. Quoiqu'il en soit, immortaliser la vie sur pellicule n'a jamais été facile. Par exemple, la conception des lentilles présente un défi certain. La lentille doit capter la lumière et imager les objets correctement, sans les déformer, sur un plan qui plus est. Le concepteur optique doit également tenir compte des spécifications relatives à l'utilisation de la lentille qu'il conçoit. Pour certaines applications, celle-ci doit avoir un très grand champ de vue. Généralement, si celui-ci est supérieur ou égal à 180°, elle est dite panoramique. Un bref historique du développement des lentilles panoramique sera présenté puis les lentilles rétrofocus,7îs/ieye, panoramique catadioptrique et à distorsion variable seront décrites. Finalement, une liste des applications impliquant les lentilles panoramiques sera dressée.
1.1 Aperçu historique
On pourrait croire que le développement de techniques pour faire de l'imagerie panoramique est récent. Ce n'est cependant pas le cas puisque, dès 1846, soit à peine 7 ans après l'invention du processus de photographie par Daguerre, le photographe Frederick von Martens inventa un dispositif permettant de faire tourner la caméra pour obtenir des photographies panoramiques couvrant près de 150° (Marien, 2006). Un des premiers daguerréotypes pris par Martens est présenté à la figure 1.1.
par Frederick von Martens. Cette image est tirée de (Marien, 2006).
Il y a tout de même une différence entre faire tourner une caméra sur 150° et utiliser une lentille dont le champ de vue est de 150°, mais le désir de photographier de vastes scènes était déjà présent au milieu du 19e siècle. Vers 1859, le photographe Thomas Sutton créait une lentille panoramique qui consistait en une sphère vide faite en verre et remplie d'eau. Elle couvrait un champ de vue appréciable de 120° mais l'image devait être projetée sur une surface courbe en raison de la forte courbure de champ induite par la lentille (Kingslake, 1989). L'année suivante, Joseph Schnitzer et Charles Harrison mettait au point une lentille grand-angle appelée globe. Cette lentille symétrique était constituée de deux doublets achromatiques. Son champ de vue total était de 92° et cette lentille a fait l'objet d'un brevet aux États-Unis. Vers 1866, cette lentille était d'usage courant pour les photographes (Kingslake, 1989). L'année 1891 voit réapparaître un concept proposé par Barlow dès 1834, consistant à ajouter un élément négatif à l'arrière d'un système de lentille ce qui allait mener à la création du téléphoto (Ray, 2002). Le téléphoto a pour particularité d'avoir une longueur totale plus petite que sa longueur focale effective. Il est possible d'obtenir une lentille possédant un grand champ de vue en inversant le téléphoto pour obtenir un rétrofocus. Poussé à l'extrême, ce type de design peut posséder un champ de vue total de 180° et beaucoup de distorsion lorsque le premier élément est un ménisque fortement négatif. En 1924, Robert Hill créait la Sky Lens pour le Meteorogical Office britannique afin de permettre l'observation des nuages (Ray, 2002). Ce type de design allait lentement évoluer et adopter le nom qu'on lui connait aujourd'hui, le fisheye. Ce nom lui a été donné par Robert William Wood qui disait que l'image produite par un fisheye était
1.2 Types de lentilles panoramiques
Il existe plusieurs types de lentilles panoramiques. Quatre types principaux seront décrits ici : le rétrofocus, le fisheye, la lentille panoramique catadioptrique et la lentille panoramique présentant un contrôle de distorsion.
1.2.1 Téléphoto inversé ou rétrofocus
Avant de parler de rétrofocus, il convient de définir ce qu'est un téléphoto. Il est généralement composé d'un groupe positif de lentilles suivi d'un groupe négatif de lentilles. Dans sa plus simple expression, il peut s'agir uniquement d'une lentille positive et d'une lentille négative. Cet arrangement particulier permet de produire un système très compact possédant une longueur focale effective importante. Si on définit L, la distance entre le vertex avant et le plan image, et EFL, la longueur focale effective, il est possible d'obtenir le rapport téléphoto (telephoto ratio) qui est décrit à l'équation (1.1).
L
r = — (1.1) EFL
Une lentille téléphoto doit posséder un rapport téléphoto inférieur à 1 quoiqu'il se situe généralement plus entre 0,6 et 0,85 (Smith, Modem Lens Design, 2005). Si le téléphoto couvre habituellement un champ de vue restreint, il est possible de renverser le design et d'obtenir un téléphoto inversé, aussi appelé rétrofocus. Un rétrofocus est composé d'un groupe négatif de lentilles suivi d'un groupe positif de lentilles. Contrairement à celui du téléphoto, le plan focal du rétrofocus est situé loin du vertex avant, ce qui occasionne des dispositifs avec une importante longueur L sans toutefois qu'il y ait modification de la
100 mm Figure 1.2 : Schéma optique d'un rétrofocus
Ce rétrofocus à 7 éléments possédant un champ de vue total de 64°. Il s'agit du design de Kimura enregistré au bureau américain des brevets sous le numéro 4,235,520. Cette figure est tirée de (Smith, Modem Lens Design, 2005).
Il est possible de pousser le design d'un téléphoto jusqu'à obtenir un champ de vue de plus de 180°. À ce moment il n'est plus approprié de parler de distorsion puisqu'il devient évident que si on image un champ de vue hémisphérique, l'image obtenue sera ronde. Ce type de lentille est alors appelé fisheye et est décrit à la section suivante.
1.2.2 Fisheye
La particularité du fisheye est de posséder comme premier élément un ménisque fortement négatif. Cette forme de lentille permet de capter les rayons arrivant à de grands angles en modifiant de façon importante leur trajectoire. Le champ de vue de ces lentilles est alors très grand, de l'ordre de 180°. L'image captée contient beaucoup de distorsion, ce qui peut être corrigé par la suite à l'aide de procédés informatiques. La figure 1.3 montre une lentille de type fisheye.
tirée de (Smith, Modem Lens Design, 2005).
1.2.3 Lentille panoramique catadioptrique
Un système optique catadioptrique est formé de lentilles et de miroirs; il opère en réfraction et en réflexion. La figure 1.4 illustre comment des miroirs peuvent être utilisés avec des caméras munies de lentilles traditionnelles dans le but d'obtenir des imageurs possédant des champs de vue hémisphériques.
(b)
Figure 1.4 : Utilisation de miroirs dans des systèmes optiques panoramiques Des miroirs (a) sphériques ou (b) coniques peuvent être utilisés pour produire des systèmes optiques panoramiques catadioptriques. Cette figure est tirée de (Ishiguro, 2001).
figure 1.4(a), la lentille se voit elle-même en raison de la forme de la surface réfléchissante utilisée. Il peut donc avoir un point aveugle au centre de l'image.
Figure 1.5 : Photographie prise à l'aide d'un imageur panoramique catadioptrique
x Photographie de Time Square prise à l'aide d'une caméra catadioptrique panoramique
développée au Computer Vision Laboratory de l'Université de Columbia, New York. Cette image est tirée du site web du laboratoire et a été prise par Blake Shaw.
1.2.4 Lentille panomorphe
La distorsion importante que présentent les lentilles panoramiques peut être mise à profit pour augmenter les performances d'une lentille pour une utilisation particulière. Lors de la conception de la lentille, le concepteur optique peut choisir de tenir compte du profil de distorsion afin de créer des zones de résolution instantanées augmentées. En décidant de designer la lentille pour que les objets en périphérie soient plus étirés et apparaissent plus gros, la résolution instantanée se trouve augmentée sur ces objets et il est possible de mieux en discerner les détails. La lentille panomorphe exploite le contrôle de la distorsion. Elle est décrite en détail à la section 2.3.1.
Les applications utilisant des lentilles ayant un champ de vue important sont multiples car il est souvent souhaitable d'avoir une vue d'ensemble d'une scène. Les différents domaines propices à l'utilisation des lentilles panoramiques sont présentés ci-dessous.
1.3.1 Surveillance
Lorsqu'on pense à l'observation d'une grande partie ou de la totalité d'une scène, les applications de surveillance s'imposent d'elles-mêmes. Dans ce domaine, il n'est pas souhaitable d'avoir des angles morts qui ne seraient pas couverts par un réseau de plusieurs caméras à plus faible champ de vue par exemple. L'utilisation de caméras panoramiques est donc un bon choix.
On peut palier à la faible résolution instantanée des lentilles panoramiques en utilisant simultanément une caméra PTZ (Pan-Tilt-Zoom) qui permet d'obtenir une plus grande résolution instantanée sur les objets d'intérêt. Une autre solution pourrait être d'utiliser un système à résolution instantanée variable spatio-temporellement comme celui proposé par Parent et Thibault (Parent & Thibault, 2010).
1.3.2 Conduite assistée
La conduite automobile assistée est un domaine en plein essor. Déjà, des caméras panoramiques sont installées sur certains types de véhicules. Elles fournissent au conducteur une meilleure vision lorsqu'il recule ou sont couplées à des systèmes informatiques qui permettent la détection d'obstacles ou l'aide au stationnement en parallèle. Plusieurs systèmes incluant de l'aide à la décision ont déjà été mis au point et testés en collaboration avec des constructeurs automobile (Matuszyk, Zelinsky, Nilsson, & Rilbe, 2004).
rendant ainsi la conduite plus sécuritaire pour tous les usagers de la route.
1.3.3 Divertissement
Les utilisations des lentilles panoramiques sont diverses, passant d'applications de détection et de sécurité au domaine du divertissement. Les images hémisphériques acquises à l'aide d'imageurs panoramiques peuvent être projetées sur des écrans sphériques, créant ainsi un environnement immersif pour le spectateur.
Figure 1.6 : Environnement immersif créé à l'aide d'images panoramiques
Grâce aux images prise à l'aide de lentilles panoramiques, il est possible d'effectuer plus facilement une projection sur un écran hémisphérique pour créer un
environnement immersif. Cette figure est tirée de (Thibault, Panoramic Lens Applications Revisited, 2008)
Plus simplement, les lentilles à grand champ de vue permettent de créer des panoramas sans avoir à assembler plusieurs images entre elles; il suffit simplement de redresser l'image.
particuliers que dans les entreprises. Les interlocuteurs peuvent se trouver à différents endroits dans le monde et pouvoir tout de même tenir une réunion comme s'ils étaient assis à la même table grâce à la vidéoconférence. Les webcaméras traditionnelles possèdent un champ de vue restreint qui ne permet parfois même pas de voir les mains de la personne filmée. De plus, si plusieurs personnes se trouvent devant la caméra, elles doivent se tenir très proches les unes des autres afin d'être vues. Ces problèmes peuvent être réglés
simplement par l'utilisation d'une lentille panoramique. Un imageur peut être posé au centre de la table vers le haut et chaque personne autour de la table sera vue par la caméra. La réunion pourra alors se dérouler de façon habituelle.
1.3.5 Inspection
Un imageur panoramique peut également être utilisé pour inspecter un pipeline. Cela permettra de bien visualiser les parois de celui-ci. Un imageur avec un champ de vue plus faible ne permettrait de voir que le centre du tuyau ou alors on devrait utiliser plusieurs imageurs placés en périphérie de la sonde pour bien voir tout l'intérieur du tuyau.
Si la lentille est suffisamment petite, elle peut également être placée dans un endoscope servant à voir et à s'orienter dans le corps humain lors d'une opération (Roulet, et al., 2010).
Avec l'utilisation de plus en plus répandue des lentilles panoramiques, leur caractérisation est un enjeu important qui présente certains défis. L'objet de ce mémoire est la conception et le test d'un banc de caractérisation permettant de mesurer la résolution instantanée linéaire et la qualité d'image de différentes lentilles panoramiques. Le chapitre 2 pose les bases théoriques relatives aux systèmes optiques et aux aberrations présentes dans ceux-ci. Les particularités des lentilles panoramiques sont ensuite exposées et la notion relative à la qualité d'image de Fonction de Transfert de modulation (MTF, pour Modulation Transfer Function) est expliquée. Le chapitre 3 se concentre sur la conception et la description du montage expérimental et des cibles utilisées pour les différentes mesures. Par la suite, les précautions expérimentales relatives au positionnement de la caméra et à l'uniformité du profil de luminosité sont discutées. Finalement, les caméras et les lentilles panoramiques utilisées pour les tests effectués à l'aide du montage sont décrites et les méthodes d'analyse des données dans le but d'obtenir la résolution instantanée linéaire et le profil de qualité d'image sont présentées. Le chapitre 4 regroupe les résultats expérimentaux obtenus à l'aide du montage quant à la résolution instantanée linéaire et à la qualité d'image pour les différentes lentilles panoramiques et caméras testées. Ces résultats ont pour but de valider la méthode de mesure et d'analyse développée pour le banc de caractérisation pour lentilles panoramiques.
Ce chapitre contient des éléments de théorie relatifs au contenu de ce mémoire. Tout d'abord, les différentes quantités relatives aux systèmes optiques sont présentées et les différentes aberrations optiques sont décrites de façon qualitative. Des détails sont également donnés sur les lentilles panomorphes de la compagnie Immervision, un type particulier de lentille étudié dans ce mémoire. Finalement, la théorie relative à la fonction de transfert de modulation (MTF, pour Modulation Transfer Function) ainsi que différentes méthodes expérimentales pour la calculer sont exposées.
2.1 Quantités relatives aux systèmes optiques
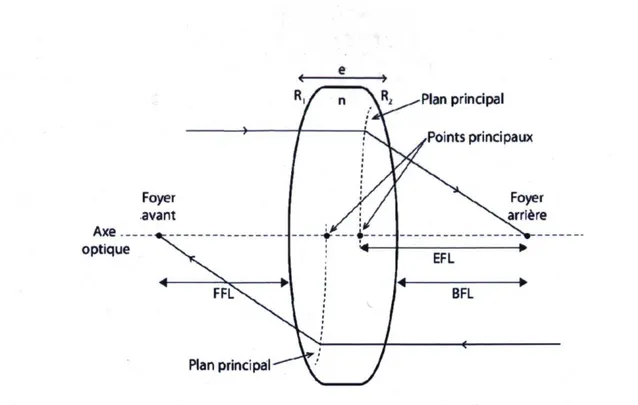
Le système optique le plus simple est une lentille seule. Cette lentille possède, tout comme les systèmes optiques les plus complexes, certaines quantités qui la définissent. Si on considère par exemple une lentille parfaite d'épaisseur e, de matériau d'indice de réfraction n et de rayons de courbure Ri et R2, celle-ci possède un foyer avant, un foyer arrière, une longueur focale avant (FFL) représentée par la distance entre le foyer avant et le vertex avant de la lentille, une longueur focale arrière (BFL) mesurée entre le vertex arrière de la lentille et le foyer arrière ainsi qu'une longueur focale effective (EFL), tel qu'illustré à la figure 2.1.
Axe optique
Plan principal Points principaux
Plan principal
Figure 2.1 : Schéma présentant les différentes quantités présentes dans un système optique Un système optique simple comme une lentille d'épaisseur e, de rayons de courbure
RI et R2 et de matériau d'indice de réfraction n possède des longueurs focales caractéristiques. La longueur focale avant ou FFL est la distance entre le foyer avant de la lentille et le vertex avant alors que la longueur focale arrière ou BFL est la distance entre le vertex arrière de la lentille et le foyer arrière. Cette lentille est aussi caractérisée par sa longueur focale effective (EFL). Cette figure est tirée de (Smith, Modem Optical Engineering, 2008).
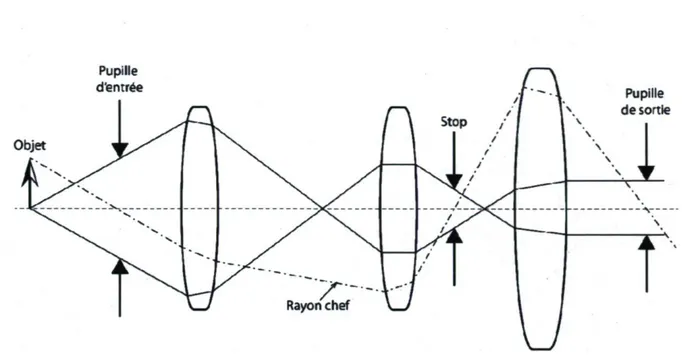
Un système optique sert à collecter la lumière provenant d'un objet et à la diriger vers un capteur afin d'en obtenir une image nette. Il est un assemblage précis de plusieurs lentilles de formes et de matériaux différents et contient parfois un iris. En plus d'être caractérisé par des longueurs focales avant, arrière et effective propres, il présente toujours une pupille d'entrée, une pupille de sortie et un stop définis à l'aide du tracé du rayon chef comme le montre la figure 2.2.
Pupille d'entrée
Objet
Pupille \ de sortie
Figure 2.2 : Position de la pupille d'entrée, de la pupille de sortie et du stop dans un télescope simple.
Le stop est une ouverture physique, dans ce cas-ci un iris, qui limite la quantité de lumière présente dans le système. La pupille d'entrée et la pupille de sortie sont respectivement l'image du stop dans le plan objet et dans le plan image. Cette figure est tirée de (Smith, Modem Optical Engineering, 2008)
Le stop {aperture stop en anglais) est une ouverture physique dans un système optique qui sert à limiter la quantité d'énergie présente dans le système. Cette ouverture peut être de grandeur fixe, comme dans le cas d'une lentille ou variable si on utilise un iris. L'emplacement du stop détermine le trajet du rayon chef qui doit partir du haut d'un objet et traverser l'axe optique à la position du stop. Quant à elle, la pupille d'entrée d'un système est l'image du stop dans le plan objet alors que la pupille de sortie est l'image du stop dans le plan image. Il est également possible de contrôler le champ de vue observé à l'aide d'un field stop. Habituellement, le détecteur remplit cette fonction. (Smith, Modem Optical Engineering, 2008).
Une autre donnée importante concernant les systèmes optiques est le f-number (noté F/#). Cette quantité est définie à l'équation (2.1) par le rapport entre la longueur focale effective du système et le diamètre de la pupille d'entrée.
F/# = EFL
Les manufacturiers fournissent souvent cette donnée dans les spécifications de leurs différents systèmes de lentilles. Si la lentille possède un f-number élevé, il y aura peu d'énergie qui traversera le système, mais la profondeur de foyer sera plus grande, c'est-à-dire que le capteur pourra subir un défocus plus grand sans compromettre la netteté de l'image. La profondeur de foyer est fonction directe du produit de la taille acceptable du blur spot et du f-number. Le concept de blur spot est représenté à la figure 2.3.
Pupille de sortie Plan image idéal Plan image réel
Figure 2.3 : Représentation de la profondeur de foyer et du blur spot.
La profondeur de foyer S' est définie comme la taille du blur spot acceptable multipliée par le f-number du système. En ajoutant un iris à la position du stop, il est possible de réduire la taille de la pupille d'entrée et ainsi d'augmenter le f-number ce qui a pour effet d'augmenter la profondeur de foyer. Cela se fait cependant au prix de la perte de lumière occasionnée par la présence de l'iris.
Certaines lentilles possèdent un iris variable à la position du stop ce qui permet de pallier dans une certaine mesure au défocus en augmentant la profondeur de foyer si aucun dispositif de mise au foyer n'est en place.
2.2 Les aberrations optiques et leur impact
Tous les systèmes optiques réels contiennent des aberrations. Les différentes aberrations optiques décrivent la différence entre le point d'arrivée d'un rayon réel sur le plan image et le point d'arrivée de ce même rayon décrit par l'approximation paraxiale aussi appelée approximation des petits angles. L'optique paraxiale repose sur l'hypothèse que l'angle d'incidence est petit. La loi de Snell-Descartes peut alors s'écrire en remplaçant le terme sinôj par le premier terme de sa série de Taylor.
n,0, = n292 (2.2)
Généralement considérée valide pour des angles inférieurs à 20°, cette approximation n'est cependant plus valide lorsque l'on considère des rayons dont les angles d'entrée sont importants. Il faut alors tenir compte non seulement du premier, mais également des autres termes de la série de Taylor du terme sinôj.
2.2.1 Aberrations monochromatiques
Ludwig von Seidel a été le premier à considérer les deux premiers termes de la série de Taylor du sinus de l'angle 0 dans le calcul du tracé de rayon monochromatique. Il lui a été possible de prédire le point d'arrivée (x',y') du rayon réel pour un rayon sous-tendu par un objet de hauteur h par rapport à l'axe optique et dont les coordonnées polaires dans la pupille d'entrée du système sont (p,0) en tenant compte des cinq aberrations monochromatiques ou aberrations de Seidel. On peut représenter la positions (x',y') par la position paraxiale (x,y) à laquelle on additionne des corrections dues aux aberrations optiques. Les équations (2.3) et (2.4) présentent une approximation de la position réelle d'un rayon puisqu'elles ne tiennent compte que des aberrations de premier et de troisième ordre.
x' « A^psin 0 + 5,/?3 sin 0 + £2/?2/zsin(20) + (£3 + B4)ph2 sin© (2.3) v ' * A,p cos 0 + A2h + Bxp% cos 0 + B2p2h [2 + cos(20)]+(3B3+ B4 )ph2 cos 0 + B5h* (2.4)
Dans les équations (2.3) et (2.4), la position paraxiale en x est représentée par le terme A,psm® et la position paraxiale en y par le terme A,pcosO + A2h. Les termes qui suivent sont des corrections sur cette position dues aux aberrations optiques de troisième ordre. Le coefficient Bi quantifie l'aberration sphérique, B2 représente le coma, B3 est l'astigmatisme, B4 est la courbure de Petzval et B5 est la distorsion. Les aberrations de troisième ordre peuvent être divisées en deux catégories. L'aberration sphérique, le coma et l'astigmatisme dégradent la qualité de l'image alors que la courbure de Petzval et la distorsion la déforment simplement.
2.2.1.1 Aberration sphérique
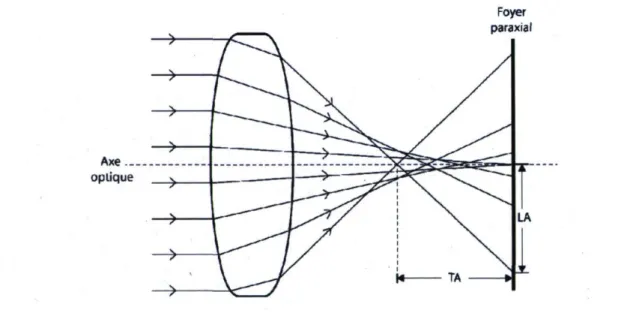
L'aberration sphérique se traduit par une variation de la longueur focale en fonction de l'ouverture, c'est-à-dire la hauteur à laquelle un rayon entre dans le système optique. Plus les rayons sont proches de l'axe optique, plus ils seront au foyer (Hecht, 2005). L'aberration sphérique peut être transverse ou latérale, comme illustré à la figure 2.4.
Foyer paraxial
Figure 2.4 : Effets de l'aberration sphérique sur les rayons traversant un système optique L'aberration sphérique est la variation de la longueur focale en fonction de la hauteur d'entrée h d'un rayon. Elle peut être transverse (TA) ou latérale (LA).
2.2.1.2 Coma
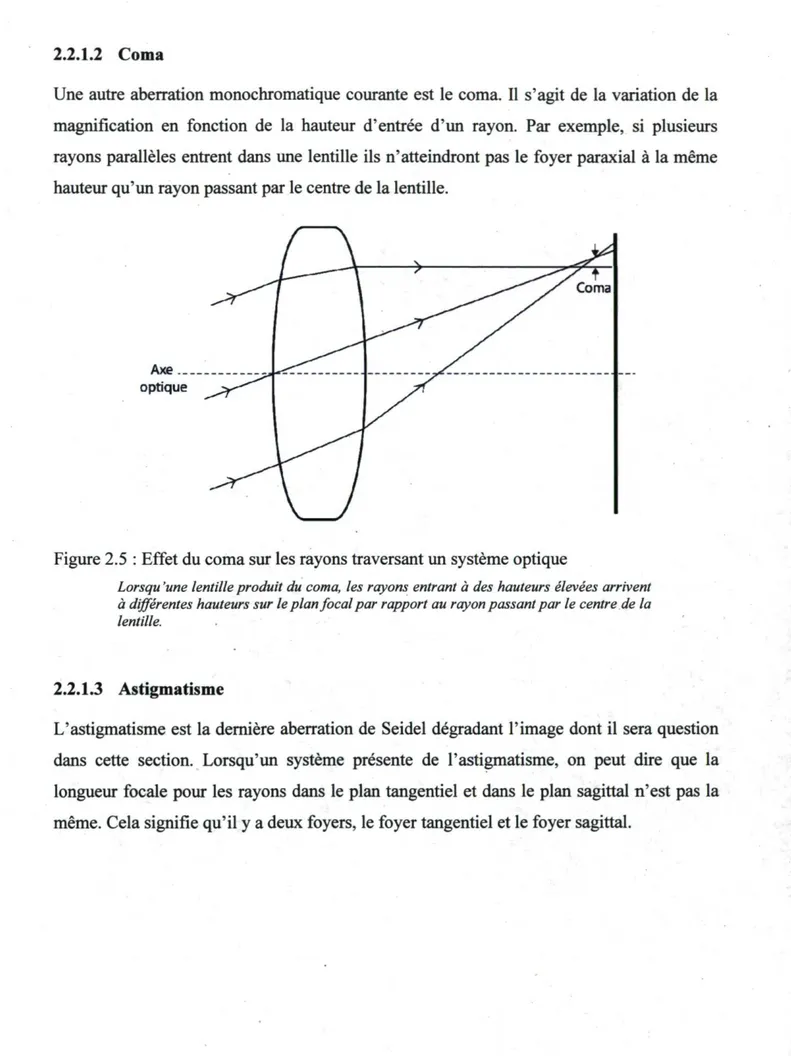
Une autre aberration monochromatique courante est le coma. Il s'agit de la variation de la magnification en fonction de la hauteur d'entrée d'un rayon. Par exemple, si plusieurs rayons parallèles entrent dans une lentille ils n'atteindront pas le foyer paraxial à la même hauteur qu'un rayon passant par le centre de la lentille.
Figure 2.5 : Effet du coma sur les rayons traversant un système optique
Lorsqu 'une lentille produit du coma, les rayons entrant à des hauteurs élevées arrivent à différentes hauteurs sur le plan focal par rapport au rayon passant par le centre de la lentille.
2.2.1.3 Astigmatisme
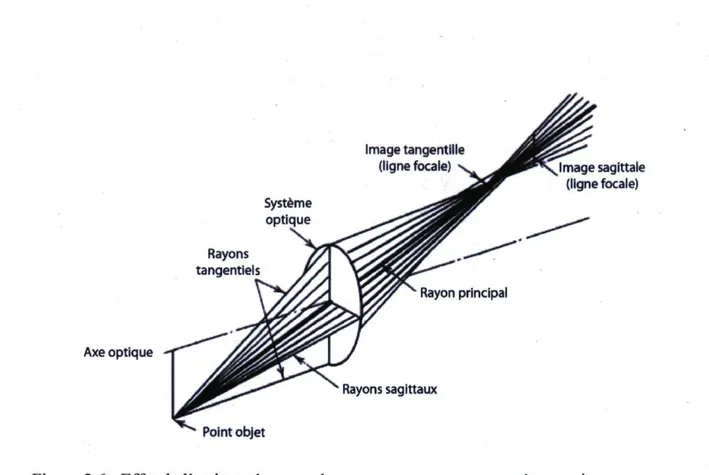
L'astigmatisme est la dernière aberration de Seidel dégradant l'image dont il sera question dans cette section. Lorsqu'un système présente de l'astigmatisme, on peut dire que la longueur focale pour les rayons dans le plan tangentiel et dans le plan sagittal n'est pas la même. Cela signifie qu'il y a deux foyers, le foyer tangentiel et le foyer sagittal.
Système optique Rayons tangentiels Axe optique Image tangentille
(ligne focale) sagittale (ligne focale)
Rayons sagittaux
Point objet
Figure 2.6 : Effet de l'astigmatisme sur les rayons traversant un système optique Lorsqu'un système optique présente de l'astigmatisme, les rayons tangentiels et sagittaux agissent selon deux longueurs focales différentes. On voit alors deux lignes focales plutôt qu 'un point. Cette figure est tirée de (Smith, Modem Optical Engineering,
2008).
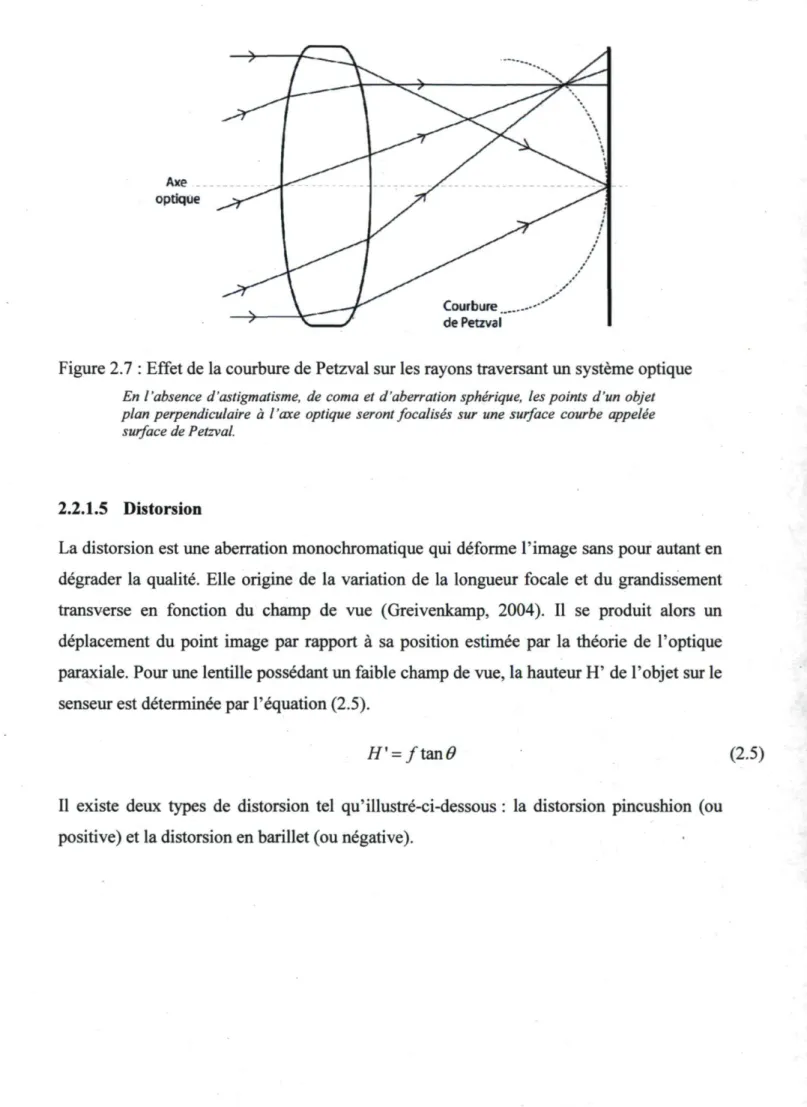
2.2.1.4 Courbure de Petzval
En l'absence d'astigmatisme, d'aberration sphérique et de coma, la courbure de Petzval est le plan image courbe sur lequel est imagé un objet plan perpendiculaire à l'axe optique (Greivenkamp, 2004). Plus l'angle d'entrée des rayons est important, plus il sera focalisé loin du foyer paraxial.
Figure 2.7 : Effet de la courbure de Petzval sur les rayons traversant un système optique En l'absence d'astigmatisme, de coma et d'aberration sphérique, les points d'un objet plan perpendiculaire à l'axe optique seront focalisés sur une surface courbe appelée surface de Petzval.
2.2.1.5 Distorsion
La distorsion est une aberration monochromatique qui déforme l'image sans pour autant en dégrader la qualité. Elle origine de la variation de la longueur focale et du grandissement transverse en fonction du champ de vue (Greivenkamp, 2004). Il se produit alors un déplacement du point image par rapport à sa position estimée par la théorie de l'optique paraxiale. Pour une lentille possédant un faible champ de vue, la hauteur H' de l'objet sur le senseur est déterminée par l'équation (2.5).
H' = ftm0
(2.5)Il existe deux types de distorsion tel qu'illustré-ci-dessous : la distorsion pincushion (ou positive) et la distorsion en barillet (ou négative).
(a)
re
n
±s
(b) (c)
Figure 2.8: Description schématique de la distorsion pincushion et en barillet (a) Une grille sans distorsion pourrait subir (b) de la distorsion de type pincushion ou (c) en barillet en traversant un système optique.
La distorsion se mesure comme la différence entre la position réelle des rayons et la position décrite par l'équation (2.5). Il a été établi à la section 1.2.1 qu'il était peu approprié de parler de distorsion à partir de cette relation lorsqu'on a à faire à une lentille possédant un champ de vue avoisinant 180°. Une nouvelle relation décrivant mieux le comportement des rayons qui traversent une lentille panoramique est décrite à l'équation (2.6). Cette relation est souvent appelée f-Q. L'angle 0 est exprimé en radians.
H ' = f 0 (2.6)
Quoiqu'au début le critère de qualité d'un fisheye était la constance de la longueur focale/ sur tout le champ de vue, il est maintenant courant de voir des lentilles panoramiques dont la longueur focale varie en fonction du champ de vue. La variable / devient alors une fonction variant selon 0.
dH'
dO
= f(0)
(2.7)Si la relation (2.7) est évaluée pour une valeur de 0, on obtient alors la résolution instantanée i{ pour cet angle particulier du champ de vue.
2.2.2 Aberrations chromatiques
L'indice de réfraction d'un matériau est fonction de la longueur d'onde de la lumière qui le traverse; il est plus élevé pour le bleu que pour le rouge. Ainsi, les rayons bleus et les rayons rouges ne subissent pas les mêmes déviations. On peut diviser les aberrations chromatiques en deux classes : les aberrations axiales et non-axiales.
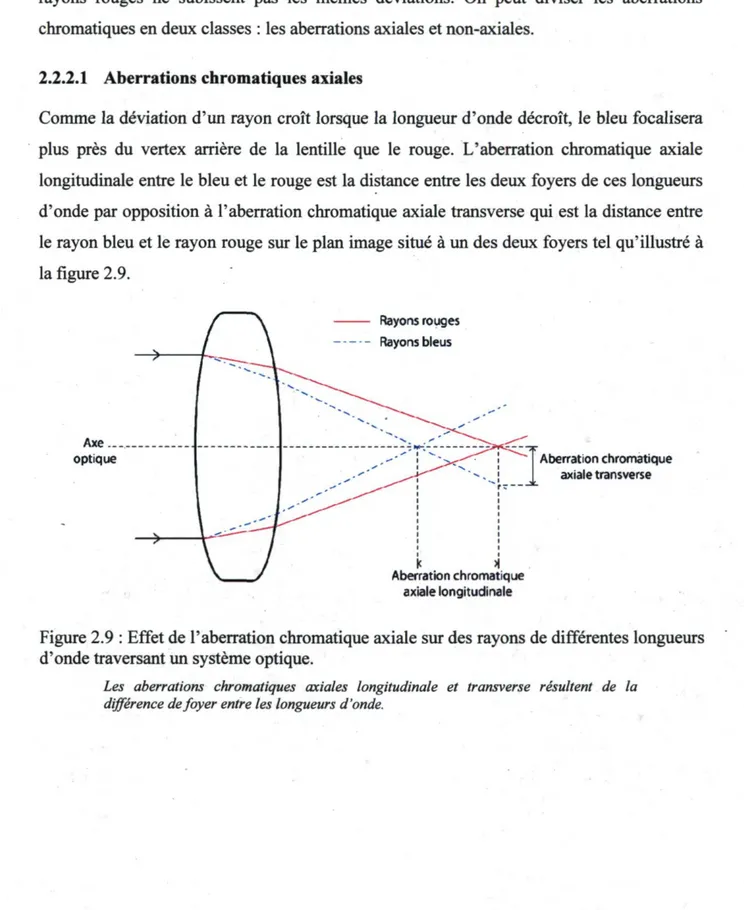
2.2.2.1 Aberrations chromatiques axiales
Comme la déviation d'un rayon croît lorsque la longueur d'onde décroît, le bleu focalisera plus près du vertex arrière de la lentille que le rouge. L'aberration chromatique axiale longitudinale entre le bleu et le rouge est la distance entre les deux foyers de ces longueurs d'onde par opposition à l'aberration chromatique axiale transverse qui est la distance entre le rayon bleu et le rayon rouge sur le plan image situé à un des deux foyers tel qu'illustré à la figure 2.9. Rayons rouges Rayons bleus - Aberration chromatique axiale transverse K H Aberration chromatique axiale longitudinale
Figure 2.9 : Effet de l'aberration chromatique axiale sur des rayons de différentes longueurs d'onde traversant un système optique.
Les aberrations chromatiques axiales longitudinale et transverse résultent de la différence de foyer entre les longueurs d'onde.
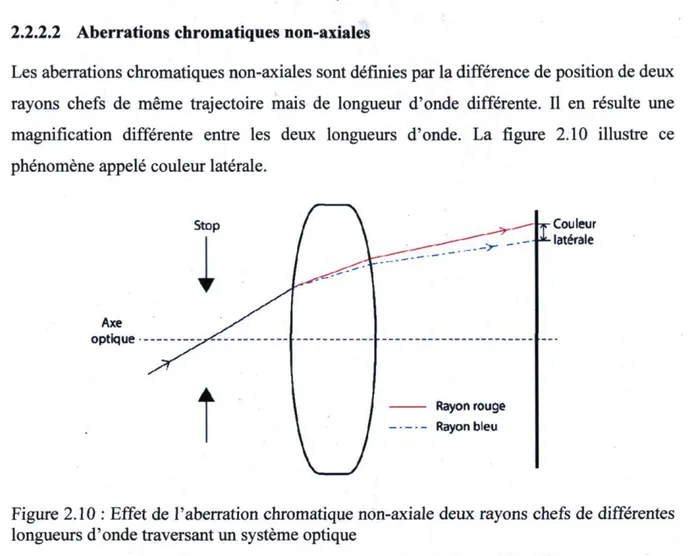
2.2.2.2 Aberrations chromatiques non-axiales
Les aberrations chromatiques non-axiales sont définies par la différence de position de deux rayons chefs de même trajectoire mais de longueur d'onde différente. Il en résulte une magnification différente entre les deux longueurs d'onde. La figure 2.10 illustre ce phénomène appelé couleur latérale.
E
Couleur latéraleFigure 2.10 : Effet de l'aberration chromatique non-axiale deux rayons chefs de différentes longueurs d'onde traversant un système optique
Lorsqu 'un rayon chef polychromatique traverse une lentille il sera dévié différemment selon les longueurs d'onde qui le compose. Cette différence de trajet mesurée au plan image se nomme la couleur latérale.
2.2.3 Fonction d'étalement du point (PSF)
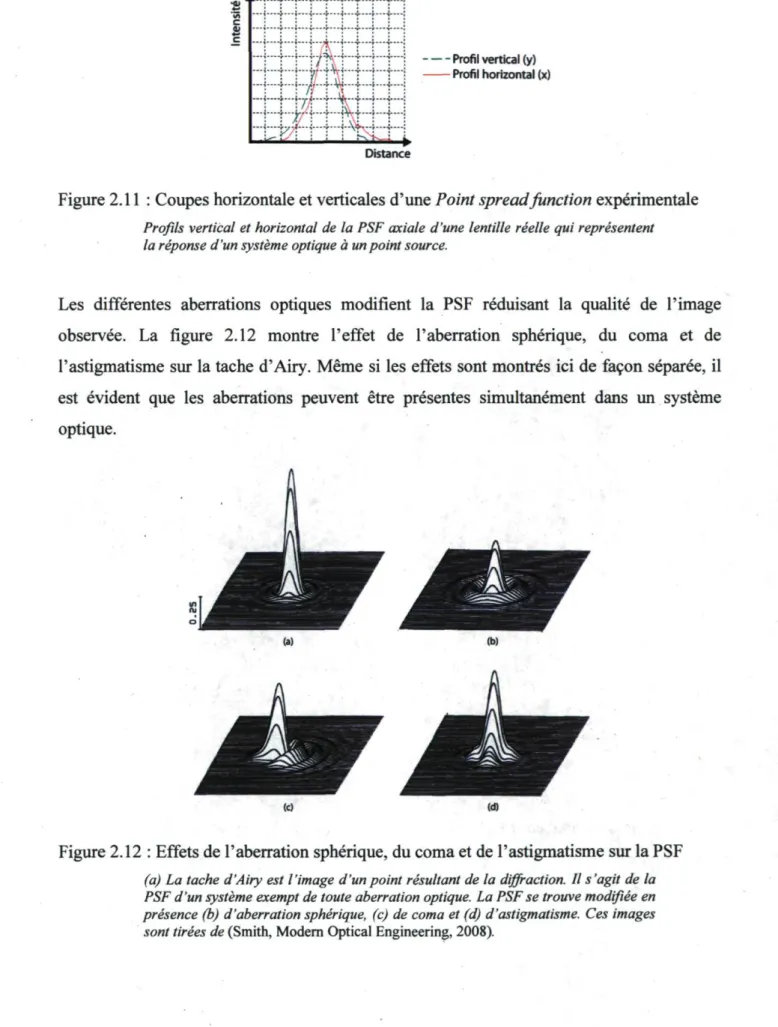
Lorsqu'un système observe un point provenant de l'infini, un point devrait être imagé sur le capteur. Dans les systèmes réels, la résolution instantanée est d'abord limitée par la diffraction qui produit une tache d'Airy plutôt qu'un point, mais aussi par les imperfections des lentilles ou des désalignements entre ces dernières. L'image d'un point n'est donc pas un point. Cette image se nomme la fonction d'étalement du point (PSF, pour Point Spread Function). La PSF est la réponse d'un système optique lorsqu'il capte un point. La figure 2.11 montre le profil horizontal et le profil vertical de la PSF axiale d'une lentille réelle.
Figure 2.11 : Coupes horizontale et verticales d'une Point spread function expérimentale Profils vertical et horizontal de la PSF axiale d'une lentille réelle qui représentent la réponse d'un système optique à un point source.
Les différentes aberrations optiques modifient la PSF réduisant la qualité de l'image observée. La figure 2.12 montre l'effet de l'aberration sphérique, du coma et de l'astigmatisme sur la tache d'Airy. Même si les effets sont montrés ici de façon séparée, il est évident que les aberrations peuvent être présentes simultanément dans un système optique.
Figure 2.12 : Effets de l'aberration sphérique, du coma et de l'astigmatisme sur la PSF (a) La tache d'Airy est l'image d'un point résultant de la diffraction. Il s'agit de la PSF d'un système exempt de toute aberration optique. La PSF se trouve modifiée en présence (b) d'aberration sphérique, (c) de coma et (d) d'astigmatisme. Ces images
La PSF est une donnée très utile pour juger de la qualité de l'image produite par un système. Ce sujet sera discuté à la section 2.4.
2.3 Caractéristiques des lentilles panoramiques
La caractéristique principale des lentilles panoramiques est leur très grand champ de vue, habituellement égal ou supérieur à 180°. Dans des systèmes semblables, le premier élément est habituellement un ménisque fortement négatif. Ce type de lentille introduit beaucoup de distorsion de type barillet, produisant une image dans laquelle les lignes droites sont courbes comme à la figure 2.13.
> ~ ~
(a) (b)
Figure 2.13 : Image prise à l'aide d'un fisheye avant et après redressement
(a) Une caméra munie d'une lentille panoramique de type fisheye avec un champ de vue de 180° est posée sur le sol. Il est possible de constater que la vue produite est peu naturelle et que les lignes droites sont courbes, (b) Il est possible de redresser cette image suite à un traitement informatique pour produire une vue plus naturelle de la scène. Cette figure est tirée de (Spencer, Rogers, & Hoffman, 2006).
De plus, la longueur focale des lentilles panoramiques est souvent très courte, ce qui permet aux objets relativement proches d'être traités comme s'ils se trouvaient à une distance infinie.
2.3.1 Lentilles panomorphes
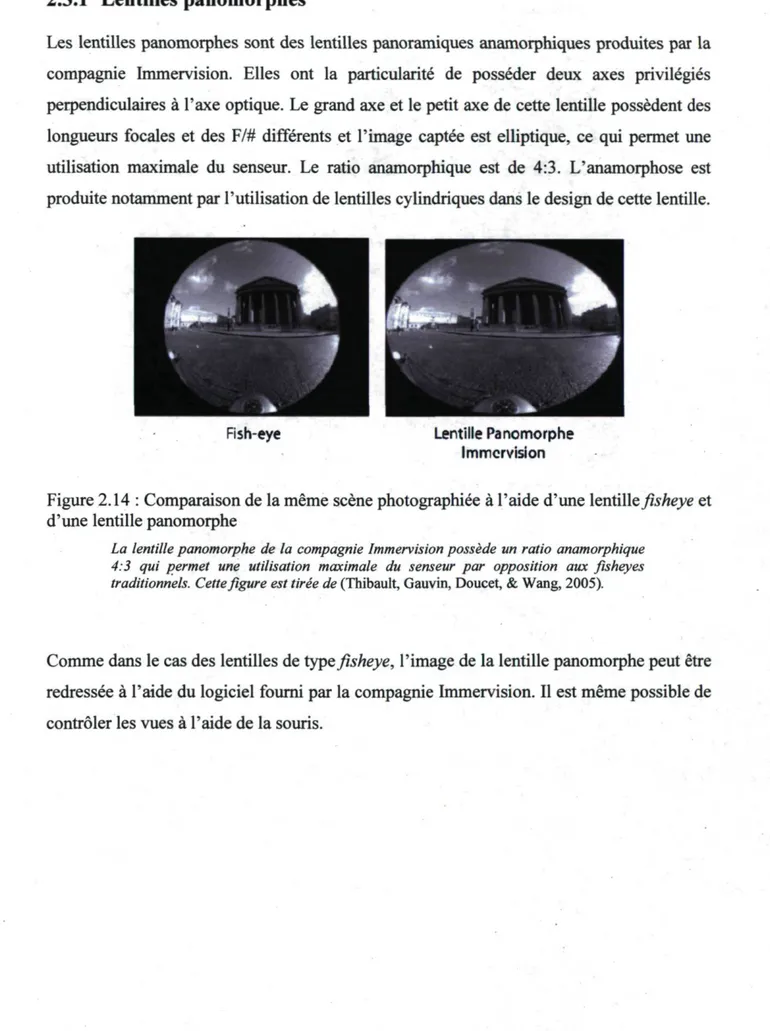
Les lentilles panomorphes sont des lentilles panoramiques anamorphiques produites par la compagnie Immervision. Elles ont la particularité de posséder deux axes privilégiés perpendiculaires à l'axe optique. Le grand axe et le petit axe de cette lentille possèdent des longueurs focales et des F/# différents et l'image captée est elliptique, ce qui permet une utilisation maximale du senseur. Le ratio anamorphique est de 4:3. L'anamorphose est produite notamment par l'utilisation de lentilles cylindriques dans le design de cette lentille.
Fish-eye Lentille Panomorphe Immervision
Figure 2.14 : Comparaison de la même scène photographiée à l'aide d'une lentille fisheye et d'une lentille panomorphe
La lentille panomorphe de la compagnie Immervision possède un ratio anamorphique 4:3 qui permet une utilisation maximale du senseur par opposition aux fisheyes traditionnels. Cette figure est tirée de (Thibault, Gauvin, Doucet, & Wang, 2005).
Comme dans le cas des lentilles de type fisheye, l'image de la lentille panomorphe peut être redressée à l'aide du logiciel fourni par la compagnie Immervision. Il est même possible de contrôler les vues à l'aide de la souris.
(a) (b)
Figure 2.15 : Image prise à l'aide d'une lentille panomorphe avant et après redressement (a) L'image originale est (b) redressée par le logiciel fourni par la compagnie Immervision. Celui-ci permet d'avoir jusqu'à quatre vues différentes de la scène dans lesquelles il est possible de naviguer à l'aide de la souris.
Ce type de lentille possède également des zones de résolution instantanée augmentée résultant d'un profil de distorsion non-linéaire. L'emplacement des zones de résolution instantanée augmentée a été spécialement choisi de façon à répondre aux besoins spécifiques de certaines applications comme la vidéoconférence ou la vidéosurveillance.
Figure 2.16 : Schéma des zones de résolution instantanée augmentée de la lentille panomorphe
Les applications pour une lentille panomorphe qui possède des zones de résolution instantanée augmentée sont multiples. Par exemple, ce type de lentille peut être utilisé pour (a) la vidéoconférence ou (b) la vidéosurveillance. Cette figure est tirée de
(Thibault, Enhanced Surveillance System Based on Panomorph Panoramic Lenses, 2007)
2.4 Fonction de transfert de modulation (MTF)
Même si la distorsion est l'aberration monochromatique la plus marquante lorsqu'il est question de systèmes panoramiques, il n'en demeure pas moins que les autres aberrations jouent un rôle dans la formation des images.
Lorsqu'un objet est capté par un système optique, la qualité de ses contours et le contraste se dégradent en raison des aberrations monochromatiques et chromatiques induites par les différentes lentilles formant le système.
Malgré le soin que le concepteur optique prend à minimiser les aberrations selon les spécifications du système optique désiré, il en reste toujours quelques-unes. De plus, d'autres sont ajoutées à cause du tolérancement, c'est-à-dire la marge de manœuvre laissée au manufacturier pour réaliser les lentilles (rayons de courbure, épaisseur) et assembler le système (distance entre les lentilles, alignement, tilt).
Pour tester les performances optiques d'un système, on utilise souvent une série de barres noires et blanches d'égales largeurs qui possède une fréquence spatiale / correspondant à l'inverse de la période T. En faisant l'acquisition de l'image d'un tel patron, il est possible de calculer la modulation pour la fréquence spatiale observée en faisant le rapport des intensités maximale et minimale. La fréquence spatiale est généralement notée en cycles/mm, un cycle étant formé d'une barre blanche et d'une barre noire.
Modulation = / m a x~/ m i n (2.8)
max min
La figure 2.17 montre les transformations subies par un patron passant dans un système optique et les conséquences sur le contraste et donc sur la modulation pour deux patrons ayant des fréquences spatiales différentes.
Patron périodique
Système optique Image
I
bysieme optique _ — _ — m — BIII-^llll
< >JUUTJ
Contraste 100% Contraste 90% (a) Patron périodiqueSystème optique Image
T
m-\m
JUIIU
Contraste 100% Contraste 20% (b)Figure 2.17: Dégradation en contraste d'un patron périodique traversant un système optique pour deux fréquences spatiales
Lorsqu'un patron périodique de fréquence spatiale f=l/T est capté par un système optique, l'image est dégradée par rapport à l'objet et il y a une perte de contraste entre le noir et le blanc. Généralement, le contraste sera plus fort pour une fréquence spatiale (a) faible que pour une fréquence spatiale (b) élevée.
Pour avoir un portrait complet d'un système optique, il est souhaitable de calculer la modulation pour plusieurs fréquences spatiales différentes. La relation entre la modulation et la fréquence spatiale se nomme la MTF. On peut ainsi déterminer quelle est la taille minimale des objets qu'on peut observer si on désire, par exemple, une modulation supérieure à 50%. La figure 2.18 représente les courbes radiale (T) et azimutale (S) de MTF selon 3 champs de vue pour un système optique panomorphe d'Immervision.
M S M
I "
TS D i f f . LiBlt TS O.OC. 0.00 (deal TS 0.00, 62.50 (<*•«;)TS o.oo, as. )3 «tao)
■ Vv ■ Vv
.
' > — - '
a w m M ai «j
Spatial Frequency in cycles per Ma polychromatic Diffraction w t f Panomorph Lens (security, L2 IMM 1130 2)
2 0 1 0 - 1 1 - 0 8
Data for 0.4500 t o 0.62S0 mn.
Surface: T»>rje Paaeaorph PSD •■pt/sag.ZMX c o n f i g u r a t i o n 1 o f l
Figure 2.18: Courbes de MTF obtenues pour la lentille panomorphe à l'aide du logiciel ZEMAX®
La MTF est la relation entre la modulation et la fréquence spatiale. La fréquence spatiale est notée en cycles/mm. Les courbes ci-dessus sont les MTF radiale (T) et azimutale (S) d'une lentille panomorphe d'Immervision pour trois champs de vue différents. Ces courbes ont été produites à l'aide du logiciel ZEMAX®.
Les valeurs de MTF sont multiplicatives pour un système optique. Par exemple, pour un système formé d'une caméra et d'une lentille commerciale, la MTF du système sera le produit de la MTF des deux composants (Smith, Modem Optical Engineering, 2008).
MTF = MTF ■ MTF
1 V 1 1 r système m l rlentille 1 V 1 1 rc a m é r a
(2.9)
Comme il serait fastidieux de photographier plusieurs patrons périodiques de fréquences spatiales différentes pour obtenir une courbe de MTF, il existe plusieurs autres techniques pour calculer la MTF.
2.4.1 Détermination de la MTF à l'aide la PSF
Il est possible d'obtenir assez facilement la PSF d'un système optique, que ce soit un ensemble lentille-caméra ou simplement une lentille seule. En faisant la transformée de Fourier en 2 dimensions de la PSF, on obtient la Fonction de transfert optique (OTF) dont la norme est égale à la MTF (Goodmand, 1996).
OTF = 3(PSF) (2.10)
MTF = \OTF\ (2.11)
De cette façon, il est possible d'obtenir la MTF pour un champ de vue donné sans photographier un nombre important de patrons périodiques de fréquences spatiales différentes.
2.4.2 Détermination de la MTF à l'aide d'un profil de contour
Il est aussi possible d'obtenir la MTF pour un champ de vue donné à l'aide de cibles inclinées semblables à celles illustrées à la figure 2.19. On utilise des cibles inclinées afin d'avoir un profil de contour plus précis par un échantillonnage plus grand du profil.
Figure 2.19 : Cibles inclinées pouvant être utilisées pour obtenir la MTF d'un système optique
Une cible inclinée présentant une frontière entre une zone noire et une zone blanche peut être utilisée pour déterminer la MTF d'un système pour un champ de vue donné.
Il existe un lien entre le profil de contour et la MTF. En effet, on peut dériver le profil de contour pour obtenir la fonction d'étalement de la ligne (LSF). La transformée de Fourier
en une dimension de la LSF est la MTF pour la direction perpendiculaire à la transition (Bhakta, Somoyaji, & Christensen, 2010). La relation entre ces trois quantités est représentée schématiquement à la figure 2.20.
Profil de contour Fooction détalement de la ligne (LSF)
MTF
zssh
o
j f o u r i e r ^ ^ "g
Distance Distance Fréquence spatiale Figure 2.20 : Schéma de l'obtention de la MTF à partir d'une fonction de contour On peut obtenir la fonction d'étalement de la ligne en faisant la dérivée d'un profil de contour. La MTF est alors la transformée de Fourier de la LSF.
Cette technique est beaucoup plus rapide que celle utilisant la PSF pour obtenir la MTF car une seule image permet d'obtenir cette information pour plusieurs angles d'incidence. Lorsqu'on calcule la MTF par la transformée de Fourier de la PSF, on doit prendre une image pour chaque angle d'incidence par la rotation du système caméra-lentille ou de la source. De plus, certaines lentilles panoramiques captant moins de lumière aux grands angles qu'au centre, l'intensité du point source doit être augmentée, ce qui n'est pas le cas lorsqu'on utilise les fonctions de contours qui sont faciles à acquérir aux grands angles malgré la perte de luminosité.
Ce chapitre a servi à poser les bases théoriques nécessaires à la bonne compréhension de ce mémoire. Les quantités définissant un système optique, comme la longueur focale effective et le stop ont été présentées. Les différentes aberrations monochromatiques de troisième ordre et chromatiques ont été décrites de façon qualitative. Il est à noter que la distorsion est une aberration très importante dans les systèmes optiques panoramiques et qu'il est intéressant de la caractériser. Les particularités de tels systèmes ont été exposées et un complément a été ajouté sur la lentille panomorphe de la compagnie Immervision en raison de son profil de distorsion non-linéaire et de son anamorphose. Finalement, la section 2.4 a été consacrée à l'explication de la fonction de transfert de modulation ou MTF et aux façons de l'obtenir expérimentalement. Ce point sera discuté plus en détail au chapitre 3.
Le but principal du projet de recherche qui est l'objet de ce mémoire est la conception d'un banc de caractérisation pour mesurer la distorsion et la qualité d'image spécialement conçu pour les lentilles panoramiques. Ce chapitre traite du banc de caractérisation en commençant par une description du montage et des précautions expérimentales à prendre lors des mesures et de leurs répercutions sur les résultats obtenus. Les lentilles et les caméras utilisées pour les tests sont décrites et la méthode d'analyse des données est finalement exposée pour les deux types de mesure possibles.
3.1 Description du montage expérimental
En raison du très grand champ de vue des lentilles panoramiques, il était nécessaire de trouver une géométrie adéquate afin qu'il soit possible de caractériser tout le champ de vue dans le plan tangentiel ou sagittal en un seul cliché. Il a été décidé que le montage aurait la forme d'un cylindre comme le montage utilisé par Kumler et Bauer (Kumler & Bauer, 2000). Le montage tel d'installé dans le laboratoire est illustré à la figure 3.1. En plus de présenter un avantage quant au positionnement en hauteur de la caméra, il est plus facile à éclairer qu'un montage en forme d'hémisphère par exemple.
Figure 3.1 : Photographies du banc de caractérisation pour lentilles panoramiques Le banc de caractérisation pour lentilles panoramiques a une géométrie cylindrique ce qui permet d'obtenir des informations pour tous les champs de vue dans le plan tangentiel ou sagittal en un seul cliché contrairement aux chartes utilisées habituellement pour les lentilles avec un plus faible cham de vue.
Le montage est composé d'une base en PMMA dans laquelle est creusée une rainure de rayon intérieur de 75 cm, d'équerres et de deux bandes de plexiglas de 12 po de hauteur qui sont insérées dans la rainure. Les nombreuses équerres assurent que le rayon intérieur demeure le même pour toutes les hauteurs (de 0 à 12 po). Le montage peut couvrir des champs de vue de -110° à +110° par souci de polyvalence. La figure 3.2 montre un schéma du montage (vue de dessus) afin d'illustrer le plan de la base de PMMA et la position des différentes équerres.
Rainure Équerre
Figure 3.2 : Schéma du banc de caractérisation pour lentilles panoramiques Schéma du montage lorsque vu du dessus. Les équerres sont distribuées uniformément sur la circonférence afin d'assurer un bon support aux bandes de plexiglas insérées dans la rainure de rayon intérieur de 75 cm. Le montage peut couvrir des champs de vue de-110° à+110°.
Il est intéressant de travailler avec des lentilles panoramiques car leur longueur focale est très petite, de l'ordre d'un ou deux millimètres. Cela signifie qu'on peut prétendre observer des objets relativement proches comme s'ils étaient à l'infini. Les cibles posées sur le support cylindrique sont donc considérées comme étant à l'infini car elles sont à une distance de 75 cm, ce qui est plus de 500 fois supérieur à la longueur focale des lentilles à caractériser.
Le banc de caractérisation a été crée dans le but d'obtenir deux mesures précises : la résolution instantanée (ou champ de vue d'un pixel) et la qualité d'image (MTF). Les cibles ont été crées à l'aide du logiciel Adobe Illustrator et imprimées sur papier mat à l'aide d'une imprimante grand format chez Graphica afin d'éviter d'avoir à jumeler plusieurs feuilles puis apposées sur le support en plexiglas.
3.1.1 Cibles de résolution instantanée
Pour obtenir la résolution instantanée d'un système caméra-lentille en fonction du champ de vue dans le plan objet, il faut d'abord obtenir Yimage mapping, c'est-à-dire la position des cibles dans le plan image de la caméra en fonction de leur position angulaire dans le plan objet, comme décrit à l'équation (2.6).
Pour ce faire, on utilise une série de rectangles noirs et d'espaces blancs d'une largeur angulaire de 2° chacun. Le centre de ces rectangles et de ces espaces est référencé, c'est-à-dire que leur position angulaire est connue par rapport au centre du montage cylindrique. La figure 3.3 met en évidence le patron de cibles utilisé pour obtenir Yimage mapping d'un système caméra-lentille.
1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 H 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 l i i l
Figure 3.3 : Cibles utilisées pour la mesure de la résolution instantanée
La série de cibles utilisée pour déterminer l'image mapping d'un système caméra-lentille se trouve dans l'encadré rouge. Il s'agit d'une série de rectangles noirs et d'espace blancs d'une largeur angulaire de 2° chacun. Les carrés noirs aux deux extrémités servent à bien positionner la caméra.
Il est possible d'obtenir la relation entre la position dans le plan image du centre des rectangles et des espaces en fonction de l'angle dans le plan objet. La figure 3.4 illustre
l'allure de Yimage mapping d'un système caméra-lentille panomorphe ainsi que la courbe représentant le modèle f-Q. -125e-UJ -îee wo -535e Champ de vue (°)
Système caméra-lentille Panomorphe ■f-theta
Figure 3.4 : Image mapping d'un système caméra-lentille panomorphe
L'image mapping d'un système caméra-lentille panomorphe n'est pas une relation linéaire entre l'angle dans le champ de vue et la hauteur H ' tel qu'attendu par le modèle f-â
Dans le cas des imageurs panoramiques, le terme / de l'équation (2.6) n'est pas constant, il dépend de l'angle dans le plan objet tel. On peut obtenir le terme f ( 0 ) en dérivant les points de Yimage mapping. Ce terme représente en fait la résolution instantanée du système en fonction de l'angle 0 du champ de vue. La résolution instantanée d'un système caméra-lentille panomorphe est présentée à la figure 3.5.
- i n " m
•V
a* a r"* e ™• a 1A 01 X • \ i a •* _ft ^ m J " * • o 4j\SZ R " ' a 3 O • r m oc T i « -100 -50 0 50 100 Champ de vue (°)Figure 3.5 : Résolution instantanée pour un système caméra-lentille panomorphe
La résolution instantanée d'un système caméra-lentille panomorphe peut être obtenue en dérivant les points appartenant à l'image mapping. La résolution instantanée est donnée en pixels/0 et la taille d'un pixel est de 2,2 /m. La résolution instantanée est
obtenue à l'aide des données présentées à la figure 3.4.
3.1.2 Cibles de qualité d'image (MTF)
Le banc de caractérisation permet également d'obtenir les courbes de MTF pour différents champs de vue à l'aide des cibles présentées à la figure 3.6.
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■ ■■■■!■
■
■ ■■■
Figure 3.6 : Cibles utilisées pour mesurer la MTF radiale et azimutale
Le patron utilisé pour obtenir la MTF pour différents champs de vue se trouve à l'intérieur de l'encadré. Les cibles utilisées pour obtenir la MTF sont des carrés noirs d'une grandeur angulaire de 10° inclinés à 5,71° par rapport à la verticale. Il est possible d'obtenir la MTF radiale à l'aide des transitions horizontales et la MTF
À l'aide du patron illustré à la figure 3.6, il est possible d'obtenir la MTF radiale et la MTF azimutale à l'aide de transitions tel qu'expliqué à la section 2.4.2. C'est pourquoi ce patron contient deux ensembles de marques de positionnements (petits carrés aux deux extrémités). Les deux marques au centre servent à obtenir la position de la transition centrale lors de l'analyse informatique des données. De plus, les carrés noirs sont inclinés à 5,71° par rapport à la verticale en raison du programme qui est utilisé pour extraire les courbes de MTF; la raison en sera exposée à la section 3.4.2. Ils ont une largeur angulaire de 9,95° de façon à ce que la section noire mesure 10° lorsqu'inclinée. Les angles du champ de vue auxquels il est possible d'obtenir une courbe de MTF radiale sont donc 0°,±10°,±20°, etc. Pour les courbes de MTF azimutale, les angles sont plutôt -35°,-15°, +5°, +25°, +45°, etc. Pour obtenir plus de données, il est possible de faire tourner le système caméra-lentille d'un angle entre 0° et 9°. Il faudra cependant traiter séparément les images, mais plus de champs de vue seront étudiés.
3.2 Précautions expérimentales
Plusieurs facteurs peuvent influencer la qualité d'une mesure. Il est possible d'identifier et de contrôler certains d'entre eux afin d'obtenir une mesure plus précise. Cette section s'attarde d'abord à l'influence du positionnement du système caméra-lentille dans le montage sur la mesure puis à l'uniformité de la luminosité ambiante.
3.2.1 Positionnement de la caméra
En se référant à la figure 3.2, on constate la présence d'un repère cartésien situé au centre du montage cylindrique dont les coordonnées de l'origine sont (xo,yo,zo). Il est important de bien positionner le système caméra-lentille de façon à ce que la lentille soit alignée tel qu'illustré à la figure 3.7.
Vue de dessus
Vue de face
Figure 3.7 : Positionnement de la caméra par rapport au centre du montage
Le système caméra-lentille est positionné dans le montage de façon à ce que la position (xo,yo,z0) se trouve légèrement derrière le vertex avant en z et centrée sur la frontale en
x et en y.
Le système caméra-lentille doit être placé à l'origine (xo,yo,zn) du système pour la position zo se trouve légèrement derrière le vertex avant de la lentille et que les coordonnées xn et yo soient celles du vertex avant. S'il est nécessaire de d'appliquer une rotation au système caméra-lentille, celle-ci devra été effectuée autour de ce point ce qui nécessitera plus d'ajustement que de simplement fixer la caméra sur une base de rotation.
Il est possible de prédire les effets d'un déplacement Ax ou Az de la caméra sur l'angle 0' du champ de vue dans le plan objet par rapport à l'angle attendu 0. Par souci de clarté, les quantités mentionnées ci-dessus sont représentées à la figure 3.8.
%
1
I
I
#Figure 3.8 : Influence du déplacement de la caméra sur l'angle d'incidence
Si le système caméra-lentille est déplacé par rapport à la position idéale (x0,yo,zo) pour
se retrouver en (xc,yo,zc), l'angle attendu 9 vaudra alors 6'pour une cible quelconque.
Les distance Ax et Az sont considérées comme positives telles qu'illustrés sur ce schéma.
On peut aisément connaître la position d'une cible dans le repère (x,y,z) en se référant à l'équation d'un cercle. Pour obtenir les coordonnées de ce même point dans le repère (x',y',z'), il suffit d'appliquer une translation (Ax,0,Az).
x' - x - A x z'' = z-Az
L'équation (3.1) montre les coordonnées dans le repère (x',z') qui a subit une translation (Ax,Az) par rapport au repère idéal (x,z) d'un point dont l'angle attendu du champ de vue est 0. On peut obtenir l'angle réel en degrés à l'aide de l'équation (3.2).
(3.1)
fx'^
& = arctan — = arctan -
fx-Ax}
L'erreur sur la position angulaire dans le plan objet sera donc exprimée par la relation (3.3). Les coordonnées x et z sont liées par le fait que toutes les cibles se trouvent sur un montage cylindrique de rayon R ce qui permet d'exprimer la différence angulaire en fonction de x uniquement. A0 = arctan x-Ax z - A z . - arctan \ z j ( = arctan x-Ax y / R2- x2- A z -arctan > ^ 2 x 2) (3.3)
Sachant que la relation (2.6), ou/-0, unit les coordonnées objets et images dans le cas d'une lentille fisheye, il est possible de déterminer une relation entre AH' et A0. Cette relation permettra de déterminer quel est le déplacement maximal de la caméra (Axmax, Azmax) qui entraîne un déplacement AH' sur le senseur inférieur à la taille d'un pixel.
AH' = r arctan ( x-Ax yjR2-x2-Az
-arctan
VF^
x2J(3.4)
Dans l'équation (3.4), r, est la résolution instantanée d'un imageur panoramique en m/°. En utilisant la loi d'adition des arc-tangentes, il est possible d'obtenir une condition sur les paramètres x, z, Ax, Az et R assurant que le déplacement causé sur le senseur par un mauvais alignement de la caméra sera inférieur à la taille d'un pixel si celle-ci est de p.
-1 < cot
(p}
\l ri jx-Az
-4ÏT.
•Ax R2- 4 R2- x2 A z - x A x<1 (3.5)
La relation (3.5) est valide pour un imageur panoramique possédant une résolution instantanée rt constante sur l'entièreté du champ de vue. C'est le cas de la lentille Fujinon qui est décrite à la section 3.3.2. Sa résolution instantanée est de 11,25 pixels/0 lorsqu'utilisée avec la caméra AVT Guppy décrite à la section 3.3.1. Les couples (Ax=500um, Az=0), (Ax=0, Az=500pm) et (Ax=Az=480um) satisfont l'équation (3.5) pour ce cas particulier. Même si les désalignements Ax et Az sont très petits, il est important de souligner que, lorsqu'on évalue la résolution, on utilise la dérivée. Comme deux cibles adjacentes subiront le même déplacement dû au désalignement, la dérivée ne sera pas ou
peu affectée. De plus, il est évident que plus le rayon R est élevé moins les désalignements produisent des erreurs importantes. Un compris doit cependant être fait entre cet aspect et les considérations plus pratiques comme l'espace disponible pour placer le montage.
Après avoir positionné la caméra, la mise au foyer est effectuée à l'aide des repères carrés situés au centre du patron. On ajuste alors la lentille au meilleur foyer pour un champ de vue de 0°.
3.2.2 Profil de luminosité
La luminosité n'est pas un facteur critique dans la mesure de Yimage mapping et de la résolution instantanée puisqu'elles nécessitent la détermination des positions et non pas des contrastes. Quant à elle, la MTF est une mesure du contraste tel que décrit à l'équation (2.8) . Il est donc très important que chaque partie du montage reçoive la même luminosité de façon à éviter qu'on obtienne une meilleure courbe de MTF pour un certain champ de vue uniquement parce qu'il a reçu plus de lumière.
Afin de mesurer la MTF du système caméra-lentille dans les meilleures conditions possibles, les réglages de la caméra étaient fixés de façon à ce que la luminosité au centre soit entre 0,9 et 0,99 sur une échelle de luminosité de 0 à 1. De plus, ils devaient être uniformes pour les angles positifs et négatifs du champ de vue. Ces profils sont obtenus en faisant la moyenne de la luminosité des lignes de pixels (yo-2) à (yo+2). La figure 3.9 : profils de luminosité des quatre lentilles testées9 montre les profils de luminosité acceptables pour quatre lentilles.