AVIS
Ce document a été numérisé par la Division de la gestion des documents et des archives de l’Université de Montréal.
L’auteur a autorisé l’Université de Montréal à reproduire et diffuser, en totalité ou en partie, par quelque moyen que ce soit et sur quelque support que ce soit, et exclusivement à des fins non lucratives d’enseignement et de recherche, des copies de ce mémoire ou de cette thèse.
L’auteur et les coauteurs le cas échéant conservent la propriété du droit d’auteur et des droits moraux qui protègent ce document. Ni la thèse ou le mémoire, ni des extraits substantiels de ce document, ne doivent être imprimés ou autrement reproduits sans l’autorisation de l’auteur.
Afin de se conformer à la Loi canadienne sur la protection des renseignements personnels, quelques formulaires secondaires, coordonnées ou signatures intégrées au texte ont pu être enlevés de ce document. Bien que cela ait pu affecter la pagination, il n’y a aucun contenu manquant.
NOTICE
This document was digitized by the Records Management & Archives Division of Université de Montréal.
The author of this thesis or dissertation has granted a nonexclusive license allowing Université de Montréal to reproduce and publish the document, in part or in whole, and in any format, solely for noncommercial educational and research purposes.
The author and co-authors if applicable retain copyright ownership and moral rights in this document. Neither the whole thesis or dissertation, nor substantial extracts from it, may be printed or otherwise reproduced without the author’s permission.
In compliance with the Canadian Privacy Act some supporting forms, contact information or signatures may have been removed from the document. While this may affect the document page count, it does not represent any loss of content from the document.
Le fil orthodontique hybride et son influence sur les mouvements de troisième ordre :
Une étude comparative.
Par: Serge Yacoub
Faculté de médecine dentaire
Mémoire présenté à la Faculté des études supérieures en vue de l'obtention du grade de
Maître ès sciences (M.Sc.)
en médecine dentaire, option orthodontie Avril, 2008
Faculté des études supérieures
Ce mémoire intitulé:
Le fil orthodontique hybride et son influence sur les mouvements de troisième ordre: Une étude comparative.
présenté par : Serge Yacoub
a été évalué par un jury composé des personnes suivantes: Dr Daniel Fortin
Dr Claude Remise Dr Réjean Labrie Dr Hicham EI-Khatib
SOMMAIRE
Grâce à la popularité fulgurante du système «Straight wire», de plus en plus de manufacturiers innovent dans ce domaine. Une des dernières innovations serait le fil de type hybride (aux coins arrondis) qui, selon le fabricant, facilite l'insertion du fil dans le boîtier tout en offrant le même contrôle des mouvements de troisième ordre qu'un fil rectangulaire de dimension semblable. Ce projet vise donc à fournir des données scientifiques et objectives afin d'évaluer si les fils orthodontiques en acier inoxydable, de dimensions semblables mais de configurations différentes influencent de façon significative l'expression des mouvements de troisième ordre lorsqu'utilisés avec des boîtiers préajustés. Deux objectifs suscitent notre intérêt: l-comparer l'expression du torque entre les deux configurations de fil avec les types et marques de boîtiers orthodontiques les plus communs en Amérique du Nord. 2- comparer l'influence du fil orthodontique hybride en acier inoxydable sur l'expression des forces de torsion selon le type et la marque de boîtier utilisé. En effet, dix modèles de boîtiers, répartis selon trois catégories, autoligaturants, esthétiques et "twin" conventionnels, sont évalués selon leur comportement avec des fils d'acier inoxydable (SS) de dimension semblable (0,021" x 0,025") mais de configurations différentes: rectangulaire versus hybride (aux coins arrondis). Les forces sont évaluées à l'aide d'un appareil Instron (modèle 4201). Les échantillons sont jumelés à l'appareil Instron via un montage dessiné et confectionné à cet effet.
Les résutlats démontrent que les fils orthodontiques en acier inoxydable, de dimensions semblables mais de configurations différentes influencent de façon significative l'expression des mouvements de troisième ordre. En effet, nous constatons que la force de torsion a tendance à diminuer lorsque nous passons d'un fil rectangulaire 0,021" x 0,025" SS à un fil hybride 0,021" x 0,025" SS, et ce, de façon significative pour tous les boîtiers à l'étude. D'ailleurs, Certains boîtiers sont beaucoup plus sensibles à un changement dans la configuration du fil utilisé. Le boîtier Speed® est peu sensible au changement de configuration tandis que le boîtier Victory® est très sensible au changement de configuration.
ABSTRACT
Due to the widespread popularity of the "Straight Wire Appliance" system, the clinician is constantly exposed to manufacturers latest purported technological advances that are introduced with very little scientific basis. Recently, a company has commercialized a hybrid archwire that includes four flat sides as weIl as four curved surfaces that interconnect the four flat sides. According to the manufacturer, these rectangular hybrid archwires provide the advantages of both rectangular and round archwires, with torque control equivalent to standard rectangular archwires.
The aim of the present study was to evaluate and compare in vitro, the torque control of two stainless steel archwires having similar dimensions but different cross-sectional configurations. The first part of the study compared the torque expression between the two archwire configurations using ten types of currently popular orthodontie brackets. The second part of this project was to evaluate the effect the hybrid archwire had on torque expression among the ten types of orthodontie brackets. Both wires were 0.021" x 0.025" stainless steel. Ten different orthodontie brackets were chosen (Smartclip®, Speed®, Damon 3®, In-Ovation-R®, Minitwin®, Victory®, Omniarch®, Clarity®, Mystique® and Ice®). The wires were mounted on a U shape support and placed on an Instron 4201 machine.
The results demonstrated that a hybrid configuration greatly influences torque expression. In fact, the force system generated tends to diminish significantly when the hybrid archwire is used instead of the rectangular archwire and this effect is consistent among aIl the brackets used in this study. Moreover, the brackets varied in their sensitivity to changes in the cross-sectional configuration of the wire when torque control was evaluated. The Speed® bracket showed very little sensitivity whereas the Victory® bracket was very sensitive to these changes.
TABLE DES MATIÈRES
SOMMAIRE ... 111
ABSTRACT ... IV LISTE DES TABLEAUX ... VIII LISTE DES FIGURES ...
x
REMERCIEMENTS ... XII 1. INTRODUCTION ... 2
2. RECENSION DES ÉCRITS ... 5
2.1 MOUVEMENTS DENTAIRES ORTHODONTIQUES: GÉNÉRALITÉS ... 5
2.2 FORCE OPTIMALE ... 6
2.3 LES TYPES DE FORCES ... 9
2.4 PRINCIPES DE BASE DE LA BIOMÉCANIQUE ... 9
2.5 LES TYPES DE MOUVEMENTS DENTAIRES ... 13
2.5.1 Mouvement de bascule ... 14
2.5.2 Mouvement de translation ... 14
2.5.3 Mouvement de racine ... ; ... 14
2.5.4 Mouvement de rotation ... 14
2.6 INFLUENCE DES MATÉRIAUX ... 15
2.6.1 Les fils orthodontiques ... 15
2.6.1.1 L'acier inoxydable ... 15
2.6.2 Les boîtiers orthodontiques ... 17
2.6.2.\ Angle; le Père de l'orthodontie moderne ... 17
2.6.2.2 Andrews; fondateur du système de boîtier préajusté ... 18
2.6.2.3 Les boîtiers autoligaturants ... 22
2.6.2.4 Les boîtiers Iinguaux ... .24
2.7 L'IMPORTANCE DU TROISIÈME ORDRE EN ORTHODONTIE ... 25
2.8 VARIABLES AFFECTANT L'EXPRESSION DES FORCES DE TORSION ... 27
2.8.1 Morphologie coronaire et positionnement des boîtiers ... 27
2.8.2 L'interface de la lumière du boîtier et du fil ... 29
2.8.3 Marge d'erreur dans la production des boîtiers ... .32
2.8.4 Résistance des boîtiers à la déformation ... 33
2.8.5 Mode de ligature ... 34 2.8.6 Distance inter-boîtier ... 34 2.9 EN RÉSUMÉ ... , ... .35 3. OBJECTIF DE L'ÉTUDE ... ... 38 4. TECHNIQUE EXPÉRIMENTALE ... 41 4.1 MATÉRIEL ET MÉTHODES ... , ... .41
4.1.1 Échantillons de fils orthodontiques ... .41
4.1.2 Les boîtiers orthodontiques ... .43
4.1.3 Environnement expérimental ... 45
4.1.3.1 Le montage ... .45
4.1.3.2 Les plaquettes d'aluminium ... ..4 7 4.1.3.3 Le niveleur d'aiguille ... ..48
4.1.3.4 L'appareil Instron ... ""'"'' ... ..48
4.1.4 Préparation des échantillons ... " ... , ... .49
4.1.5 Moyen de ligature ... 51
4.1.6 Exécution des tests ... " ... 51
4.1.7 Analyses statistiques ... 54
4.1.8 Sources d'erreurs ... 54
5. DESCRIPTION DES RÉSULTATS ... 58
5.1 FORCE DÉLIVRÉE LORS DE L'EXPRESSION DES MOUVEMENTS DE TORSION ... 58
5.2 VARIATION ENTRE LES TYPES DE BOÎTIERS ... 64
5.3 VARIATION ENTRE LES MODÈLES D'UN MÊME TYPE DE BOÎTIER ... 67
5.3.1 Boîtiers autoligaturants ... 67
5.3.2 Boîtiers esthétiques ... 69
5.4 VARIATlON ENTRE LES DIX MODÈLES DE BOÎTlERS À L'ÉTUDE ... 71
5.5 VARIATION ENTRE LES DEUX CONFIGURATIONS DE FIL POUR LE MÊME BOÎTIER ... 72
6. DISCUSSION DES RÉSULTATS ... 75
6.1 FORCE DÉLIVRÉE LORS DE L'EXPRESSION DES MOUVEMENTS DE TROISIÈME ORDRE.. ... 75
6.2 VARIATlONS ENTRE LES TYPES DE BOÎTlERS ... 75
6.3 V ARIA TlONS ENTRE LES MODÈLES D'UN MÊME TYPE DE BOÎTlERS ... 76
6.3.\ Les boîtiers autoligaturants ... 76
6.3.2 Les boîtiers esthétiques ... 79
6.3.3 Les boîtiers "twins" conventionnels ... 80
6.4 VARIA TlONS ENTRE LES DIX MODÈLES DE BOÎTlERS À L'ÉTUDE ... 81
6.5 V ARIA TlONS ENTRE LES DEUX CONFIGURA TlONS DE FIL POUR LE MÊME BOÎTlER ... 82
6.6 LIMITA TlONS DE L'ÉTUDE ... 83
7. CONCLUSIONS ... 85
8. BmLIOGRAPHIE ... 88
LISTE DES TABLEAUX
Tableau 1 : Forces optimales pour un mouvement dentaire orthodontique (Proffit, 2007) ... 8
Tableau II : Différentes prescriptions de torque, pour les centrales supérieures, selon différents concepteurs de systèmes « straight wire » ( Proffit, 2000 ) ... 21
Tableau nI : Torque effectif pour différents agencements fils-boîtiers, basé sur les valeurs nominales des manufacturiers. Le torque effectif réel serait donc plus faible ( Proffit, 2007 ) ... , ... , ... , ... , ... 23
Tableau IV : Évolution des boîtiers autoligaturants ( Graber, Vanarsdall, Vig, 2005 ) ... 24
Tableau V : Jeu, théorique et calculé, pour différents agencements de fils et de dimensions de lumières de boîtiers ( Gioka et Eliades, 2004) ... .31
Tableau VI : Variables pouvant affecter l'expression du torque des boîtiers pré- ajustés et les techniques pouvant les contrecarrer ( Gioka et Eliades, 2004 ) ... .35
Tableau
vn :
Fils orthodontiques à l'étude ... .42Tableau VIII: Boîtiers orthodontiques autoligaturants à l'étude ... .43
Tableau IX : Boîtiers orthodontiques esthétiques à l'étude ... .44
Tableau X: Boîtiers orthodontiques twins conventionnels à l'étude ... .44
Tableau XI: Moyennes, écarts-types et coefficients de variation des forces délivrées (en Newton) des différents boîtiers à l'étude avec le fil rectangulaire 0,021" x 0,025" SS ... 58
Tableau
xn :
Moyennes, écarts-types et coefficients de variation des forces délivrées (en Newton) des différents boîtiers à l'étude avec le fil hybride 0,021" x 0,025" SS ... 59Tableau XIII: Ratio des forces engendrées (fil rectangulaire / fil hybride) ... 60
Tableau XIV: Valeur des forces moyennes en Newton et sous-groupes homogènes selon le type de boîtier, lorsqu'utilisé avec un fil rectangulaire 0,021" x 0,025" SS ... 67
Tableau XV : Valeur des forces moyennes en Newton et sous-groupes homogènes selon le type de boîtier, lorsqu'utilisé avec un fil hybride 0,021" x 0,025" SS ... 67
Tableau XVI: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers autoligaturants lorsqu'utilisés avec un fil rectangulaire 0,021" x 0,025" SS ... 68
Tableau XVII: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers autoligaturants lorsqu'utilisés avec un fil hybride 0,021" x 0,025" SS ... 68
Tableau XVIII :Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
esthétiques lorsqu'utilisés avec un fil rectangulaire 0,021" x 0,025" SS ... 69
Tableau XIX: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
esthétiques lorsqu'utilisés avec un fil hybride 0,021" x 0,025" SS ... 69
Tableau XX : Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
conventionnels (Twins) lorsqu'utilisés avec un fil rectangulaire 0,021" x 0,025" SS ... 70
Tableau XXI: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
conventionnels (Twins) lorsqu'utilisés avec un fil hybride 0,02\" x 0,025" SS ... 70
Tableau XXII: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
lorsqu'utilisés avec un fil rectangulaire 0,02\" x 0,025" SS ... 71
Tableau XXIII: Valeur des forces moyennes en Newton et sous-groupes homogènes des boîtiers
lorsqu'utilisés avec un fil hybride 0,021" x 0,025" SS ... 72
Tableau XXIV : Valeurs « p »obtenues par le test de comparaison « t »de Student entre le fil
LISTE DES FIGURES
Figure 1.1 : Système Edgewise agissant tel un étau sur la surface buccale de la dent (Kesling, 1993) .. 3
Figure 1.2 : Barre métallique représentant le fil rectangulaire et les mouvements de troisième ordre dans un système Edgewise (Kesling, 1993) ... .3
Figure 2.1 : Représentation schématique du mouvement dentaire en fonction du temps, selon la résorption frontale et la résorption sous-minée (Proffit, 2007) ... 7
Figure 2.2: Taux de mouvement dentaire en fonction de la pression appliquée (Proffit (2007), d'après Quinn et Yoshikawa,(1985) ... 8
Figure 2.3: Exemple d'un couple; engagement d'un fil rectangulaire dans la lumière d'un boîtier préajusté avec une prescription de torque ( Isaacson 1993 ) ... 11
Figure 2.4: Exemple clinique d'un couple; engagement d'un fil rectangulaire dans la lumière d'un boîtier préajuté avec une prescription de torque ( Nanda, 2005 ) ... 12
Figure 2.5 : Inclinaison de la couronne déterminée par l'angle formé entre le plan occlusal et une tangente du milieu de la surface buccale de la dent (Andrews, 1972) ... 13
Figure 2.6: Courbe force/déflection de l'acier inoxydable. Selon une publication de la compagnie ORMCO (Tiré de: Remise 2005) ... 16
Figure 2.7: Angle de déviation Geu) engendré par l'utilisation de fils sous-dimensionnés et par l'arrondissement « edge bevel »des fils rectangulaires et carrés ( Siatkowski 1999) .... .30
Figure 4.1 : Pied à coulisse; modèle IP 65 Coolant Proof, du manufacturier Mitutoyo ... 42
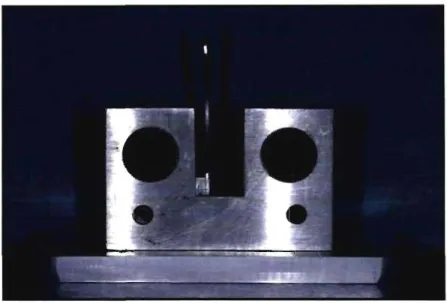
Figure 4.2 : Montage expériment;tl ... .45
Figure 4.3 : Montage expérimental, bloc en forme de « U » ... .46
Figure 4.4: Rapporteur d'angle intégré au montage ... 46
Figure 4.5: Plaquettes d'aluminium sur lesquelles les boîtiers étaient collés ... .47
Figure 4.6: Niveleur d'aiguille ... .48
Figure 4.7 : Appareil Instron 4201 (avec montage jumelé) ... 49
Figure 4.8 : Positionnement des boîtiers sur les plaquettes ... 50
Figure 4.9: Exemple d'échantillon donnant un angle de 17° ... 52
Figure 4.11: Erreur de manipulation lors du collage du boîtier sur la plaquette ... 55 Figure 4.12: Source d'erreur potentielle lors du nivelage de l'aiguille ... 56
Figure 5.1 : Forces (en Newton) exprimées par les différents échantillons pour chacun des boîtiers avec un fil rectangulaire 0,021" x 0,025" ... 61 Figure 5.2 : Forces (en Newton) exprimées par les différents échantillons pour chacun des boîtiers
avec un fil hybride 0,021" x 0,025" ... 61 Figure 5.3: Forces en Newton exprimées par les différentes marques de boîtiers, classés selon leur
catégories ( autoligaturants, conventionnels ou esthétiques) avec un fil rectangulaire 0,021" x 0,025" ... 62 Figure 5.4: Forces en Newton exprimées par les différentes marques de boîtiers, classés selon leur
catégories ( autoligaturants, conventionnels ou esthétiques) avec un fil hybride 0,021" x 0,025" ... 62 Figure 5.5: Forces (en Newton) exprimées par les différentes marques de boîtiers avec le fil
rectangulaire (bleu) et le fil hybride (rouge) ... 63
Figure 5.6: Forces (en Newton) exprimées par les différentes marques de boîtiers avec le fil
rectangulaire (bleu) et le fil hybride (rouge) ... 63 Figure 5.7: Forces (en Newton) exprimées par les différents échantillons pour chacun des types de
boîtiers avec un fil rectangulaire 0,021" x 0,025" ... 65
Figure 5.8 : Forces (en Newton) exprimées par les différents échantillons pour chacun des types de boîtiers avec un fil hybride 0,021" x 0,025" ... 65
Figure 5.9: Forces moyennes (en Newton) exprimées pour chaque type de boîtier lors des
mouvements de torsion avec le fil rectangulaire (bleu) et le fil hybride (rouge) ... 66 Figure 5.10: Forces moyennes (en Newton) exprimées pour chaque type de boîtier lors des
mouvements de torsion avec le fil rectangulaire (bleu) et le fil hybride (rouge) ... 66 Figure 5.11: Variation de la force de torsion entre le fil rectangulaire et le fil hybride pour le même
boîtier ... 73 Figure 6.1 : Angle critique de éon tact Sc et angle de torque <p en fonction de la largeur du boîtier
LISTE DES SIGLES ET DES ABRÉVIATIONS ANOVA cm oC d F g g/cm2 HSD LPD mm mm/min M N p s SS
°
" Analyse de variance Centre de résistance Centre de rotation Centimètre Degré celcius distance Force GrammeGramme par centimètre carré Honestly significant difference Ligament parodontal
Millimètre
Millimètre par minute Moment
Newton
Seuil de signification statistique Seconde
Acier inoxydable ( Stainless Steel) Degré (mesure angulaire)
Mesure en pouce ( lorsque suit une série de chiffre) Micromètre
REMERCIEMENTS
Ce projet a été réalisé au Laboratoire de Matériaux Dentaires de la Faculté de médecine dentaire de l'Université de Montréal sous la direction du Dr Daniel Fortin; je tiens à le remercier de m'y avoir accueilli, de m'avoir guidé et conseillé et, avant tout, de m'avoir fait confiance pour mener à bien cette étude.
Je désire également exprimer mes plus sincères remerciements au Dr Claude Remise, responsable de la Section d'orthodontie et co-directeur de ce projet de recherche. Tout mon respect et mon admiration pour votre disponibilité et votre dévouement pour la profession. Je vous suis profondément reconnaissant de m'avoir enseigné l'orthodontie grâce à vos connaissances scientifiques et votre expérience clinique redoutable.
Je souhaite également remercier M. Pierre Rompré pour son savoir dans le domaine des statistiques. Ses compétences ont pennis une analyse et une interprétation précises des résultats obtenus.
Je tiens aussi à remercier le Dr Réjean Labrie pour l'importance qu'il accorde à mon travail en acceptant d'être membre du jury à titre d'examinateur externe malgré ses nombreuses préoccupations. La rigueur et la créativité scientifique dont il fait preuve en orthodontie sont un atout important dans l'élaboration de cette étude.
Je suis très reconnaissant envers le Dr Hicham El-Khatib d'avoir accepté d'être le président-rapporteur du jury d'évaluation de ce mémoire et je l'en remercie sincèrement. Son expertise scientifique et son encadrement académique méritent grandement d'être soulignés.
Je désire remercier le Dr Jack Turkewicz pour sa collaboration et son apport didactique dans ce projet.
Je tiens à remercier le Dr Pierre Messier pour avoir bien voulu me léguer le montage expérimental dont il est question dans cette étude.
Merci à tous les professeur(e)s de la Section d'orthodontie de l'Université de Montréal qui ont su, d'une manière ou d'une autre, me transmettre leur savoir.
Nous devons aussi remercier les compagnies de produits orthodontiques pour leurs contributions matérielles: 3M Unitek, G.A.C, Orrnco et Strite Industries.
Merci au Fonds Paul Geoffrion pour son support financier. Évidemment, l'implication du Fonds fut essentielle, sans quoi ce projet de recherche n'aurait jamais vu le jour.
À Rima, merci pour ton soutien et ta patience, je t'aime!
1. INTRODUCTION
Dès le début du 21 e siècle des changements majeurs ont eu lieu au niveau des appareils orthodontiques fixes. Toutefois, le principe de « l'Edgewise », ou contrôle du mouvement dentaire via un fil inséré dans un boîtier muni d'une lumière rectangulaire, demeure la base de la thérapie orthodontique contemporaine (Figure 1.1). Par contre, plusieurs changements dans la fabrication des boîtiers et des fils orthodontiques ne cessent de se produire.
En 1980, le Dr Andrews développa une nouvelle technique appelée «Straight wire»: certaines modifications apportées lors de la fabrication des boîtiers les rendirent plus spécifiques à chaque dent, permettant ainsi de minimiser les plis répétitifs qu'il fallait obligatoirement faire dans les fils afin de compenser pour les différences morphologiques de ces dernières.
De nos jours, chaque boîtier peut incorporer les mouvements dentaires dans trois orientations distinctes: mouvements de 1 er, de 2e et de 3e ordres. Le premier ordre est observé en vue occlusale : mouvement de rotation et mouvement bucco-lingual. Le deuxième ordre est observé en vue buccale ou labiale: inclinaison mésio-distale et niveau occluso-gingival. Finalement, le troi sième ordre est observé en vue mésiale ou distale pour chaque dent: inclinaison labio-linguale pour les antérieures et inclinaison bucco-labio-linguale pour les postérieures. Ces mouvements bucco-linguaux ou labio-linguaux s'accomplissent par torsion ou «torque» (Figure l.2). Selon Rauch (1959), le torque ou mouvement de troisième ordre se définit de deux façons: 1) inclinaison bucco-linguale de la couronne ou de la racine, 2) activation générée par la torsion d'un fil dans la lumière du boîtier.
Selon Torstein, Meling et Odegaard (1997) l'application d'une force de torsion est considérée par plusieurs orthodontistes comme étant une des tâches les plus difficiles à accomplir. Le montant de torque appliqué au fil est souvent aléatoire et imperceptible à l'œil humain. De plus, le moment développé par les différents fils en torsion est un facteur peu étudié. Ceci vient-il du fait qu'il est difficile de délivrer un moment exact et de mesurer le degré de torsion?
Puisque les technologies évoluent à une vitesse vertigineuse et que plusieurs produits mis sur le marché promettent des résultats supérieurs à leurs prédécesseurs, l'orthodontiste se doit de connaître les effets de tout appareillage utilisé afin d'obtenir des résultats de traitement prévisibles et d'offrir une meilleure qualité de soins.
Dans le cadre du présent travail, nous avons choisi de mener une étude comparative sur la force de torsion engendrée par deux fils orthodontiques en acier inoxydable, de dimensions semblables mais de configurations différentes. En effet, dix modèles de boîtiers, préajustés, divisés en trois catégories (auto-ligaturants, esthétiques et conventionnels), seront à l'étude, jumelés à des fils 0,021" x 0,025" SS rectangulaires et 0,021" x 0,025" SS Hybrides (aux coins arrondis).
t
B C
Figure l.1: système Edgewise agissant tel un étau sur la surface buccale de la dent (Kesling, 1993)
Figure 1.2: ba"e métallique représentant lefil rectangulaire et les mouvements de troisième ordre dans un système Edgewise (Kesling, 1993)
2. RECENSION DES ÉCRITS
Ce relevé de la littérature cerne les publications pertinentes et récentes concernant les principales variables. ayant un impact sur l'expression des forces de torsion (torque) dans un système orthodontique ainsi que leur implication clinique. Par ailleurs, ce sujet relève directement de la biomécanique et suggère, dans un premier temps, une discussion sur les notions fondamentales de cet aspect de l'orthodontie. Puisque ce projet est connexe à certaines maîtrises antérieures de l'Université de Montréal, les passages traitant des généralités sur les mouvements dentaires et sur la notion de force optimale sont fortement inspirés des travaux des docteurs Julie Caron, Frédéric Gratton et Pierre Messier.
2.1 Mouvements dentaires orthodontiques : Généralités
Les mouvements dentaires orthodontiques surviennent après l'application suffisamment prolongée d'une force sur une ou plusieurs dents, engendrant ainsi un remodelage osseux. Cette réponse physiologique osseuse est transmise par l'intermédiaire du ligament parodontal (LPD), structure composée de fibres de collagène, de cellules mésenchymateuses, d'éléments sanguins et nerveux, ainsi que de fluides tissulaires (Proffit, 2000). De façon générale, la force nécessaire au mouvement dentaire provient de l'activation d'un fil orthodontique, d'un ressort ou d'un élastique et elle est transmise aux dents par l'intermédiaire de boîtiers collés à la surface buccale ou linguale de chacune d'entre elles. Suite à l'application d'une force, une réaction inflammatoire et un processus de réparation s'activent au niveau du parodonte de la dent qui la subit (Davidovitch, 1997). Parmi toutes les théories sur les mouvements dentaires il y en a deux qui ressortent particulièrement: 1) la théorie bioélectrique, où les mouvements dentaires seraient produits suite à des signaux électriques générés lorsque l'os plie et 2) la théorie pression/tension, où les mouvements dentaires feraient suite à la production de messagers chimiques induits par l'altération de la pression sanguine dans les vaisseaux sanguins du LPD. La réaction physiologique est principalement fonction de l'intensité et du type de force impliquée (Proffit, 2000; Graber et Vanarsdall, 2000).
2.2 Force optimale
Le mouvement optimal et la valeur de la force nécessaire pour le créer sont des sujets de discussion depuis le tout début de l'orthodontie. Cette portion de la recension des écrits fait ressortir les opinions ou les résultats de recherches de plusieurs auteurs; ces données nous mènent à une meilleure compréhension de la notion de résistance au mouvement dentaire. La réponse du LPD dépend davantage de la pression exercée, c'est-à-dire la force par unité de surface radiculaire, que de l'intensité de la force appliquée sur la dent (Proffit, 2000). Lorsque la pression perçue au niveau radiculaire dépasse la pression sanguine des capillaires du LPD, soit environ 20 à 26 glcm2, la vascularisation est interrompue, amenant ainsi une nécrose aseptique du ligament. On parle donc du phénomène d'hyalinisation, qui fait référence à l'aspect histologique du ligament nécrosé. Il n'y a alors plus d'activité cellulaire dans le LPD et la résorption osseuse ne peut se faire que par des cellules provenant de sites indemnes adjacents. En ce sens, après une période de latence, les ostéoclastes résorbent la paroi alvéolaire du côté opposé au LPD. Lorsque la résorption de cette paroi est complétée, le mouvement dentaire se fait soudainement dans l'espace nouvellement formé. Si la pression demeure toujours élevée, un nouveau cycle hyalinisation / latence / mouvement dentaire soudain recommencera. Ce phénomène définit la résorption sous-minée ou sapante ( undermining resorption). Ce type de mouvement s'accompagne de douleur intense et de mobilité dentaire importante. Selon Prof fi t, il n'y a aucune raison d'utiliser de tels niveaux de force.
Lorsque les forces utilisées sont physiologiques (faibles), la douleur devient à peine perceptible pour le patient. De plus, Brudvik et Pygh (1995) ont démontré que le cément est résorbé dans les zones de nécrose avasculaire du LPD lors de son remaniement. En fait, les risques de résorption radiculaire sont d'autant plus élevés que les forces utilisées sont grandes. De plus, certains dommages parodontaux sont aussi à craindre. Des cas de perte de vitalité pulpaire ont aussi été rapportés lors de traitements orthodontiques; le mouvement dentaire abrupt qui se produit, suite au phénomène de résorption sous-minée, pourrait endommager le pédicule vasculaire apical (Proffit, 2000).
Lorsque des forces légères sont employées, le mouvement dentaire se fait plutôt par le phénomène de résorption frontale. La pression exercée est moindre que la pression capillaire; l'apport sanguin et la vitalité cellulaire du LPD sont préservés. Les ostéoclastes s'activent et résorbent la corticale du côté adjacent et non du côté opposé au LPD. Le mouvement dentaire se produit alors graduellement (figure 2.1) et l'inconfort est nettement diminué pour le patient. Néanmoins, des zones localisées d'hyalinisation sont présentes, mais la résorption radiculaire engendrée est généralement rétablie dû au caractère ponctuel de la résorption (Roberts et Ferguson, 1989).
Ê
2.0S
-
c: Cl) E ~ 1.0 o E oC ë o -1 1 t _ heavy _ _ _ _ _ _ _ _ _ _ _ 1 7 14 time (days) force 21Figure 2.1,' Représentation schématique du mouvement dentaire en fonction du temps, selon la résorption frontale et la résorption sous-minée (Proffit, 2007).
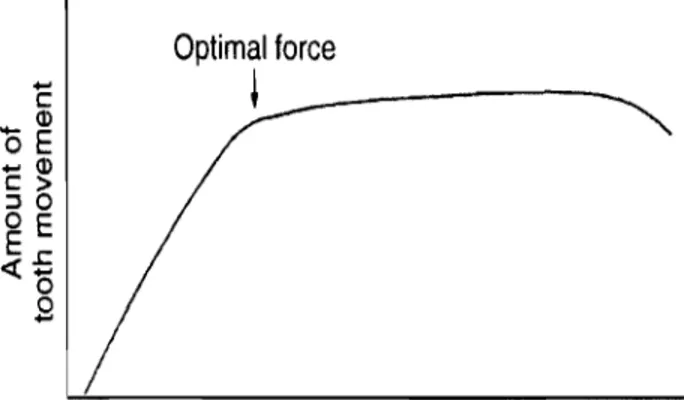
En 1985, après l'analyse de différentes théories représentant le taux de mouvement dentaire en fonction de la preSSIOn appliquée, Quinn et Y oshikawa proposent le modèle le plus probable (figure 2.2): le mouvement dentaire apparaît à un seuil minimal, il augmente linéairement jusqu'à un plateau, après quoi, toute augmentation de pression n'a aucun effet sur le taux de mouvement. Dans sa compréhension du mouvement, Proffit (2007) extrapole à l'extremité de la courbe, une baisse du taux de mouvement lorsque des pressions très élevées seraient utilisées.
Optimal force ë
~
- ( ] ) o E...
(]) C > ::J 0 o E E.c«ë
EFigure 2.2: Taux de mouvement dentaire en/onction de la pression appliquée (Pro/fit (2007), d'après Quinn et Yoshikawa, (1985).
On comprend donc que l'objectif, en orthodontie, est de produire un mouvement dentaire par résorption frontale (Proffit et Field, 2000) et ce peu importe le type de mouvement (bascule, translation, rotation, mouvement de racine). L'application d'une force légère entraîne généralement un déplacement dentaire ne dépassant pas 1 mm / mois (Piette et Reychler, 1991). Le tableau 1 nous donne un aperçu des niveaux de forces suggérés par Proffit pour différents mouvements dentaires.
Bascule non contrôlée
35 - 60
Translation
70 - 120
Mouvement de racine
50 - 100
Rotation
35 - 60
Extrusion
35 - 60
Intrusion
10 - 20.
Tableau 1: Forces optimales pour un mouvement dentaire orthodontique (Proffit, 2007).
Il précise que les écarts dépendent, en partie, de la taille de la dent; les valeurs minimales sont pour les incisives, alors que les valeurs maximales concernent les molaires. Par ailleurs, il est impératif de souligner que ces valeurs s'appliquent à un système sans friction.
Certains auteurs, dont Hanson (1997), rapportent des forces optimales nettement plus faibles que celles de Proffit mais un consensus existe sur l'utilisation de forces légères et continues, tant pour des raisons biologiques que pour un taux de mouvement optimal.
2.3 Les types de forces
Les types de forces peuvent être continus ou intermittents (Piette et Reychler 1991; Graber et Vanarsdall, 2000). La plupart des auteurs et des cliniciens, s'entendent pour dire que l'emploi de forces continues légères permet de générer un mouvement dentaire optimal. Par contre, cet idéal est difficilement accessible puisqu'aucun système ne peut délivrer sa force de façon continue pour une durée infinie.
Davidovitch (1997) affirme cependant que les forces orthodontiques ne doivent pas nécessairement être appliquées de façon continue pour produire un mouvement dentaire. Aussi, l'application de forces de. courte durée permettrait un déplacement efficace de la dent et une meilleure réorganisation des tissus parodontaux (Piette et Reychler ,1991; Graber et Vanarsdall, 2000).
2.4 Principes de base de la biomécanique
La mécanique est une science physique qui étudie l'état d'équilibre ou l'état de mouvement des corps soumis à des forces (Remise 2005). La biomécanique réfère donc à la discipline de la mécanique en relation avec les systèmes biologiques.
Lors d'un traitement orthodontique, des forces sont appliquées sur les dents. Ces forces peuvent être générées par une multitude d'appareillages orthodontiques. L'orthodontiste dépend de l'application judicieuse de systèmes de forces afin de réaliser efficacement et avec succès ses
trai tements orthodontiques. En fait, l'application adéquate des pnnCIpes de biomécanique, jumelée à un diagnostic juste, permet d'atteindre des résultats optimaux, prévisibles et ce, de façon plus efficace.
Quelques concepts fondamentaux de mécanique doivent être connus afin de SaISIr toute l'importance de la biomécanique lors d'un traitement orthodontique.
Le premier concept est celui de centre de résistance. Par contre, avant même de le définir, nous devons discuter du centre de masse; si nous considérons un corps libre, dans le vide absolu, il se comporte comme si toute sa masse était concentrée en un seul point. En appliquant une force dont la ligne d'action passe par ce point, le corps se déplace parallèlement à lui-même; il bouge par translation (Remise, 2005). On peut donc dire que le centre de masse est le point de balance ou d'équilibre d'un objet. Par ailleurs, une dent, entourée d'un ligament parodontal, d'os, de vaisseaux sanguins, d'éléments nerveux, ne représente pas un corps libre et fait donc face à tout un système de contraintes. Le centre de masse que l'on aurait dans le vide, pour une dent donnée, se trouve déplacé par l'ensemble des contraintes que l'on retrouve en bouche. Ce nouveau centre est alors appelé centre de résistance (Crés). Le concept reste cependant le même et nous pouvons dire qu'une force dont la ligne d'action passe par le Crés d'une dent, déplacera cette dernière selon un mouvement de translation. Évidemment, en orthodontie, un objet peut être défini par: une seule dent, un groupe de dents, une arcade complète, voir le maxillaire ou la mandibule. Bien qu'il soit difficile de localiser précisément le Crés d'une dent (ou d'un groupe de dents), son approximation est essentielle lors de la sélection et de l'activation d'appareils orthodontiques. En ce sens, la relation entre le système de forces agissant sur une dent par rapport à son Crés détermine le type de mouvement exprimé par la dent. Nous verrons dans la prochaine section les principaux types de mouvements dentaires.
Sachant que le Cres d'une dent monoradiculée se trouve entre le quart et le tiers de la longueur de la racine comprise dans l'os alvéolaire, et ce, en partant de la crête alvéolaire vers l'apex (Proffit, 2007), on comprend facilement pourquoi la force n'est jamais directement appliquée au niveau du Crés. Une force appliquée à distance du Crés n'engendre pas seulement un déplacement linéaire de l'objet, mais provoque aussi un mouvement de rotation. Le moment de force résulte donc en
une certaine quantité de mouvement rotatoire. Le moment de force est donc la tendance d'une force à produire de la rotation. Quantitativement, le moment de la force est déterminé en multipliant la valeur de la force par la distance perpendiculaire de la ligne d'action au C rés et s'exprime par l'équation M
=
F x d .d
Figure 2.3 : Exemple d'un couple; engagement d'un fil rectangulaire dans la lumière d'un boîtier préajusté avec une prescription de torque (Isaacson 1993).
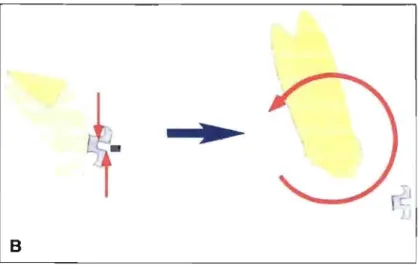
Une autre façon d'obtenir des mouvements rotatoires se fait à partir de moment de couple. Un couple est le résultat de deux forces parallèles de valeurs égales mais de directions opposées et séparées par une certaine distance (Remise, 2005). La valeur du couple est obtenue en multipliant la valeur de la force par la distance entre les deux lignes d'action. Les couples résultent en un mouvement de rotation pure autour du Crés et ce peu importe où le couple est appliqué sur l'objet. L'engagement d'un fil rectangulaire dans la lumière d'un boîtier programmé avec une prescription de torque constitue un exemple clinique de l'application d'un couple (Figures 2.3 et 2.4).
•
BFigure 2.4 : Exemple clinique d'un couple; engagement d'un fil rectangulaire dans la lumière d'un boîtier préajusté avec une prescription de torque (Nanda, 2005).
Le moment est créé par l'application d'une force excentrique au centre de résistance ou par un couple. En fait, plusieurs orthodontistes utilisent le terme « torque» comme synonyme de moment (moment de force ou moment de couple). Aussi le torque est souvent décrit, de façon erronée, en termes de degrés. Les debTfés incorporés à un filou l'inclinaison donnée à la lumière d'un boîtier sont des moyens pour produire des moments, c'est-à-dire des composantes rotatoires aux mouvements dentaires. L'unité appropriée au torque s'exprime en grammes/millimètre (force X distance).
Bref, de façon simpliste, plus le torque est positif, plus la couronne sera positionnée au buccal et plus le torque est négatif plus la couronne sera positionnée linguale ou palatine par rapport à la racine (Figure 2.5).
Figure 2.5 : Inclinaison de la couronne déterminée par l'angleformé entre le plan occlusal et une
tangente du milieu de la surface buccale de la dent (Andrews, 1972).
2.5 Types de mouvements dentaires
Les mouvements dentaires peuvent être décrits de plusieurs façons. Cependant, la variété quasi infinie de mouvements peut être subdivisée en quatre catégories: (l) bascule, (2) translation, (3) mouvement de racine et (4) rotation. Chaque type de mouvement est le résultat de l'application de différents agencements de forces et de moments, en termes de valeur, de direction et de point d'application. En ce sens, la relation entre le système de forces appliqué et le type de mouvement peut être décrite par le ratio moment / force. Aussi, le ratio moment / force détennine l'emplacement du centre de rotation. Par ailleurs, nous devons inclure la notion de santé parodontale. En effet, le mouvement dentaire qui se produit est dépendant non seulement du ratio moment / force, mais encore de la qualité du support parodontal: une hauteur réduite d'os alvéolaire ou des racines courtes, vont altérer le type de mouvement basé sur le ratio moment / force. Par exemple, pour un support parodontal de qualité (c'est-à-dire niveau osseux normal), il est plus difficile de contrôler le ratio moment / force, si la racine est plus longue. Ceci étant donné que le Crés se trouverait d'autant plus éloigné du point d'application de la force
(boîtier). Aussi, pour une racine de même longueur, il sera plus difficile de contrôler le ratio moment / force si le niveau de l'os alvéolaire est diminué, puisque le Crés serait situé plus
2.5.1 Mouvement de bascule
Le mouvement de bascule est caractérisé par un déplacement coronaire plus important que le déplacement radiculaire. Lors d'une bascule, le Crot se trouve en position apicale par rapport au Crés • Les mouvements de bascule peuvent être subdivisés en deux catégories selon
l'emplacement du centre de rotation: bascule contrôlée et bascule non contrôlée. Lors d'un mouvement de bascule non contrôlée, le Crot se situe entre le Crés et l'apex. Cependant, lors
d'une bascule contrôlée, le Crot se trouve à l'apex.
2.5.2 Mouvement de translation
Une dent subit un mouvement de translation lorsque l'apex et la couronne se déplacent de la même distance et dans la même direction linéaire. À ce moment, le Crot se retrouve à l'infini.
2.5.3 Mouvement de racine
Comme son nom l'indique, le mouvement de raCIne est caractérisé par un déplacement radiculaire beaucoup plus important que le déplacement coronaire. Pour obtenir ce type de mouvement, le ratio "moment / force" doit être d'environ 12/1 à 13/1 (Proffit 2007), ce qui engendre beaucoup de stress au niveau de l'apex et donc une augmentation du risque de résorption radiculaire.
2.5.4 Mouvement de rotation
Pour obtenir un mouvement de rotation pure, un couple est requis. Étant donné qu'aucune force nette n'agit au Crés , seule la rotation est exprimée. Le Crot est donc situé exactement au Crés de la dent. Cliniquement, ce mouvement est requis le plus souvent, lors de la correction des rotations, en vue occ1usale.
2.6 Influence des matériaux
Lorsqu'on parle de forces appliquées aux dents, les principaux acteurs de ce transfert d'énergie sont: les fils et les boîtiers orthodontiques (Meling, Odegaard, 1994).
2.6.1 Les fils orthodontiques
En effet, les fils (mais aussi, les ressorts et les élastiques) sont de première importance dans la transmission des forces lors d'un traitement orthodontique. Aussi bien pour les mouvements de torsion que pour les mécaniques de glissement ou la création d'unité d'ancrage, une connaissance des caractéristiques fondamentales des fils est essentielle. Les caractéristiques mécaniques d'un matériau sont déterminées par plusieurs facteurs. Les propriétés intrinsèques sont les qualités inhérentes d'un fil. Ces propriétés sont déterminées par la composition et l'arrangement moléculaire du matériau. La modification de ces propriétés intrinsèques altère la nature même de l'alliage. Par ailleurs, les propriétés extrinsèques sont des caractéristiques macroscopiques du matériau, comme la longueur, la forme et les dimensions d'un fil. Les propriétés extrinsèques peuvent donc être déterminées par le clinicien. Les courbes Force / Déflection (figure 2.6) et Contrainte / Déformation (Stress / Strain ) fournissent l'information pertinente à ce sujet (Proffit, 2007 ).
2.6.1.1 L'acier inoxydable
Malgré leurs limitations certaines, les fils d'acier inoxydable ont toujours leur place en orthodontie, mais de manière plus spécifique qu'auparavant. C'est en 1929 que l'acier inoxydable fut introduit en orthodontie, sous sa forme austénitique, remplaçant les alliages à base d'or.
Avec l'utilisation de l'acier inoxydable, qui est environ 20% plus rigide que les alliages à base d'or, on peut diminuer la dimension des fils, tout en délivrant des niveaux de forces comparables (Remise, 2005).
On note qu'une concentration relativement importante de chrome, 10 à 13 % minimum, est nécessaire afin que la surface de l'acier devienne "passivée" et donc inoxydable. Ceci par la formation d'une couche cohérente d'oxyde de chrome (Graber, Vanarsdall, Vig, 2005). La courbe contrainte / déformation (figure 2.6) de l'acier inoxydable nous donne les informations suivantes:
• Module d'élasticité élevé, il s'agit donc d'un alliage rigide. • Zone élastique limitée, il s'agit donc d'un alliage peu résilient.
Il, P'li SI~ll'IlESS ST~El-= r.
JJ
rJ
rj ,rJ
1Jj
rj OI':FU,CllO"Figure 2.6: Courbeforce/déflection de l'acier inoxydable. Selon une publication de la compagnie ORMCO (Tiré de : Remise 2005).
Notons que les fils rectangulaires ou carrés sont produits par un système composé de deux rouleaux positionnés à 90° l'un par rapport à l'autre ( Turk 's head ) qui compressent un fil rond en un fil rectangulaire ou carré. Ceci a pour effet de préserver les coins du fil plus ou moins arrondis (Sebanc, 1984).
Pour de faibles déflexions, l'acier inoxydable produira de grandes forces sur une courte période, exactement l'inverse de ce que l'on recherche en orthodontie pour déplacer les dents. En effet, l'acier inoxydable sera davantage utilisé comme segment stabilisateur et lors de mécaniques de glissement (Mitchell, 1996; Nikolai, 1997). Pour des déflexions plus grandes, l'acier inoxydable subira une déformation plastique. Afin de diminuer la rigidité et le taux charge / déflexion élevé de l'acier inoxydable, il est possible:
• d'utiliser des fils de diamètres plus petits, ce qui a par contre comme effet indésirable de diminuer le contrôle.
• d'incorporer des boucles. L'augmentation de la longueur de fil permettra de diminuer le taux charge 1 déflexion. Par ailleurs, le temps de chaise peut être augmenté significativement (Smith RJ, 1980)
2.6.2 Les boîtiers orthodontiques
2.6.2.1 Angle: le Père de l'orthodontie moderne.
Le qualificatif de « père de l'orthodontie moderne» donné à Edward Angle ne repose pas seulement sur sa contribution dans la classification et le diagnostic, mais aussi sur sa créativité dans le développement de nouveaux appareils orthodontiques. En effet, les appareils fixes utilisés aujourd'hui en orthodontie sont basés sur les dessins proposés par Angle au début du 20e siècle. Nous verrons, dans les lignes qui suivent, les principaux appareils développés par Angle.
Tout d'abord, le « E-Arch », développé vers la fin des années 1800, consistait en un arc rigide vers lequel les dents étaient déplacées à l'aide de ligatures. Il s'agissait donc principalement de mouvements de bascule et aucun positionnement dentaire individuel précis n'était possible.
Par la suite, Angle proposa le « Ribbon Arch» à partir duquel chacune des dents était incluse dans le système. Le « ribbon arch» connut un succès immédiat, principalement dû à son efficacité pour aligner les dents en malpositions. Néanmoins, même si le « ribbon arch» pouvait supporter la torsion lors de son insertion sur l'appareil, sa plus grande faiblesse résidait dans le contrôle (médiocre) du positionnement radiculaire. Puis, pour surmonter les faiblesses du « ribbon arch », Angle eut la brillante idée de réorienter la lumière du système, de la position verticale à la position horizontale et d'y insérer un fil rectangulaire avec une rotation de 90° par rapport au « ribbon arch », d'où le qualificatif « edgewise ». Suite à son introduction en 1928,
ce type d'appareillage devient rapidement le chef de file de la thérapie orthodontique fixe multibagues (Proffit, 2007).
De 1930 à 1960, il Y eut beaucoup de développement dans le domaine de la thérapeutique orthodontique. Il fallut néanmoins attendre les années 1970 pour connaître une véritable révolution en ce qui a trait aux boîtiers. Rappelons qu'Angle utilisait le même type de boîtier (bague) sur chaque dent. C'est dans les années 1970 que le Dr Andrews a introduit le concept de boîtier spécifique pour différents types de dents, afin d'éliminer ou plutôt de minimiser les plis répétitifs jusque-là nécessaires pour compenser les variations dans l'anatomie dentaire.
2.6.2.2 Andrews: fondateur du système de boîtier préajusté.
Lorsque le système original « Straight Wire Appliance, SW A » fut disponible, en 1972, il avait été développé suite à un projet de recherche sérieux. En utilisant un point central sur l'axe long de la couronne clinique comme référence, le fil rectangulaire devrait être plat et remplir la lumière du boîtier à la fin du traitement. En effet, les résultats d'Andrews étaient basés sur des mesures tirées de 120 individus n'ayant jamais reçu de traitement orthodontique et dont l'occlusion était considérée comme parfaite.
C'est à partir de cette étude qu'Andrews proposa les six clés d'une occlusion idéale:
1) La relation molaire: La surface distale de la première molaire supérieure doit être en contact avec la surface mésiale de la deuxième molaire inférieure. La pointe de la cuspide mésiobuccale de la première molaire supérieure doit s'aligner avec le sillon buccal de la première molaire inférieure.
2) L'inclinaison mésio-distale de ]a couronne ou « tip »: La portion gingivale de la couronne de chaque dent doit être plus distale que la portion occlusale ou incisive.
3) L'inclinaison bucco-linguale de la couronne ou « torque» : Les incisives supérieures doivent avoir un torque positif. Les incisives inférieures doivent avoir un torque négatif. À partir des canines, jusqu'aux molaires, le torque est de plus en plus négatif.
4) Rotation: Il ne devrait y avoir aucune dent en rotation.
5) Espaces: Il ne devrait y avoir aucun espace entre les dents.
6) Courbe de Spee : La courbe de Spee devrait être relativement plane, allant de 0,5 à 1,5 mm avec une moyenne de 1,0 mm.
On comprend que deux des six clés peuvent être programmées (préajustées) dans les boîtiers: le « tip »et le « torque ». L'épaisseur bucco-linguale est aussi pré-ajustée dans le « SWA», mais ne figure pas dans les six clés d'occlusion d'Andrews.
Le SWA représentait donc l'étape logique à l'amélioration de l'efficacité du système « edgewise ». Les principales caractéristiques incluses dans ce système sont discutées dans les lignes qui suivent.
Tout d'abord, il existe une variation dans l'épaisseur des boîtiers afin de compenser pour l'épaisseur variable de chacune des dents. Ceci permet donc de minimiser les plis de premier ordre (bucco-lingualement). En ce sens, à cause de la proéminence des canines dans chacune des arcades, la base de leurs boîtiers est très mince, amenant la surface labiale de ces dents tout près du fil. Par ailleurs, la différence de proéminence entre les latérales et les canines supérieures signifie que la base des boîtiers des latérales se doit d'être relativement épaisse, tandis que celle des incisives centrales sera d'épaisseur intermédiaire. Dans le même ordre d'idée, le contrôle des rotations molaires (surtout au maxillaire) est d'une importance capitale pour l'obtention d'une interdigitation optimale. En effet, les tubes spécifiques aux molaires supérieures doivent posséder un « offset» d'environ 10° pour faciliter l'obtention d'une relation de classe 1 molaire.
Une autre caractéristique du SWA est la variation dans l'inclinaison (mésio-distale) de la lumière des boîtiers, afin de minimiser les plis de deuxième ordre. Dans le système «edgewise » original, les plis de deuxième ordre, souvent appelés « plis artistiques », représentaient une part importante de la phase de finition. Ces plis étaient nécessaires parce que l'axe long de chaque dent est incliné par rapport à un fil droit continu (ou par rapport au plan occlusal).
Finalement, la variation dans l'inclinaison de la lumière des boîtiers (torque) représente la dernière caractéristique importante du SW A. La morphologie de la surface labiale de chacune des dents varie énormément. Dans le système « edgewise » original, il était donc nécessaire de procéder à des plis de troisième ordre (torque) pour chaque segment de fil rectangulaire, dans le but de l'insérer passivement.
En effet, les plis de troisième ordre n'étaient pas requis seulement pour déplacer buccalement ou lingualement une racine, mais aussi pour éviter un déplacement non voulu d'une racine positionnée correctement. Néanmoins, il faut reconnaître que ces boîtiers (edgewise préajustés) sont programmés selon des moyennes et que certaines dents dévient de cette moyenne. Nous reviendrons sur ce s4Ïet un peu plus loin.
Le torque programmé dans les boîtiers est souvent très élevé. Pour les incisives supérieures, la lumière des boîtiers doit être inclinée de sorte que les racines se retrouvent en position linguale par rapport aux couronnes, on parle alors de torque positif. Les canines ( supérieures et inférieures) quant à elles sont généralement relativement droite, tandis que les prémolaires et les molaires requièrent une augmentation de torque négatif dans le but de positionner les racines buccalement par rapport aux couronnes.
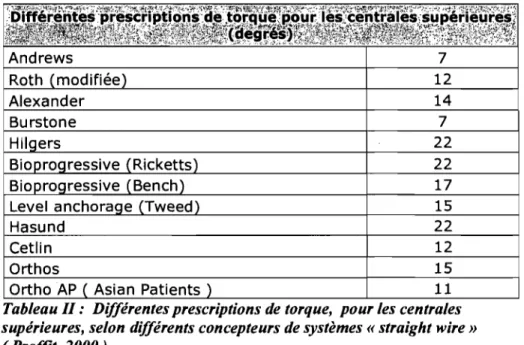
La quantité de torque recommandée dans les différentes prescriptions d'appareils varie plus que toute autre caractéristique dans le système « edgewise »contemporain (Tableau II ).
Alexander 14 7 22 22 17 15 22 12 Orthos 15
Ortho AP Asian Patients 11
Tableau II: Différentes prescriptions de torque, pour les centrales supérieures, selon différents concepteurs de systèmes « straight wire » ( Proffit, 2000).
Plusieurs facteurs sont importants dans la détennination du torque approprié, mais trois de ceux-ci sont particulièrement détenninants pour déceux-cider de la prescription nécessaire pour un type de boîtier spécifique :
1) La valeur choisie par le concepteur comme étant la valeur moyenne de l'inclinaison de la surface labiale pour ce type de dent.
2) Où, sur la surfacé labiale
Cà
quelle distance du bout incisif ou occlusal) le boîtier devra-t-il être positionné.Torque Effectif Grosseur du fil (millièmes de pouce) Lumière 0,018" 16x 16 16 x 22 17 x 25 . 18 x 18 18:,x'25,' leu (degrés) 10,9 9,3 4,1 1,5 1,0 Lumière 0,022"
:
/.=J~~$~~:~S~:~~l~~t~~?~s~;j~é}r/~~:j ~~~~:'~j~:;(:j~~:",;t:T): '~"l:1 ~,i ~>~"<:; ":: ':," 17x
25 15,5n''';1§.:W2S
i:,<:;:''9',6> .
21x
25 4,1 '!ii:;s~~;28)~'.:,,~.
,j;j3'i;iA[:":
Torque pré ajusté (degrés)
10 22 30
Torque effectif (degrés) 0,0. 11,1 0,.1 12,7 5,9 17,9 8,5 20,5 9,'0 21,0 ..• ,; .. ;:o";~'./ ".
o
. 0,1
6,5'0,4.:1.:2,4
5,9 17,9 ,'/~}7;i, é~:,:,.,":'2"0,:2: .'
19,1 20,7 25,9 28,5 29,0 8,1 13,5 20,4 . 25,9. ·28,2':
Tableau III: Torque effectif pour différents agencements fils-boîtiers, basé sur les valeurs nominales des manufacturiers. Le torque effectif réel serait donc plusfaible (Proffit, 2007J.
Comme le démontre le tableau III, le torque programmé dans le boîtier et le torque effectif fourni par un fil qui ne remplit pas la lumière peuvent être bien différents. On comprend donc que chaque type de boîtier préangulé diffère quant à son torque intégré et que le torque choisi pour chaque dent peut aussi varier en fonction de chacune des philosophies (tableau II). Par exemple, pour une centrale supérieure, la prescription de torque varie entre 7° et 22°. Ce qui signifie que chaque clinicien a sa propre perception de ce que représente la bonne quantité de torque (Van Loenen, Degrieck, 2005).
2.6.2.3 Les boîtiers autoligaturants
Les boîtiers autoligaturants représentent aussi un développement significatif dans le domaine de l'orthodontie. Un boîtier autoligaturant est défini comme un boîtier utilisant une composante permanente pour maintenir le fil à l'intérieur de la lumière (Graber, Vanarsdall, Vig, 2005). En effet, placer une ligature métallique ou élastomérique autour des ailettes d'un boîtier pour y retenir le fil nécessite un temps considérable. Les ligatures élastomériques introduites dans les
années 1970 ont largement remplacé les ligatures métalliques, principalement grâce à leur facilité et à leur rapidité d'insertion et de désinsertion. Par ailleurs, ces élastomères comportent des inconvénients majeurs, comme la dégradation rapide de la force délivrée, l'augmentation de la friction dans le système et la rétention de la plaque. En comparaison, les boîtiers autoligaturants peuvent être ouverts et fermés beaucoup plus rapidement, leur relation avec le fil est constante, c'est-à-dire, ne se dégrade pas et plusieurs études affirment qu'ils offrent moins de résistance frictionnelle que les boîtiers ligaturés de façon conventionnelle (Berger 1994, Pizzoni
1998).
Les boîtiers autoligaturants peuvent être classés en deux catégories: passifs et actifs. Les boîtiers passifs utilisent une composante mobile et rigide afin de maintenir le fil. Le contrôle des mouvements dentaires avec ce type de boîtier est déterminé exclusivement par la relation entre la lumière et le fil.
Par conséquent, le contrôle est fréquemment compromis, surtout avec les fils de plus petits calibres. Les boîtiers actifs utilisent une composante mobile et flexible afin de maintenir le fil. Cette portière flexible a la capacité d'emmagasiner de l'énergie, puis de la libérer grâce à ses propriétés élastiques.
Le concept d'attache orthodontique autoligaturante n'est pas nouveau. C'est en 1933 que
Charles E. Boyd, déposa le premier brevet pour un attachement orthodontique auto ligaturant. (Graber, Vanarsdall, Vig, 2005).
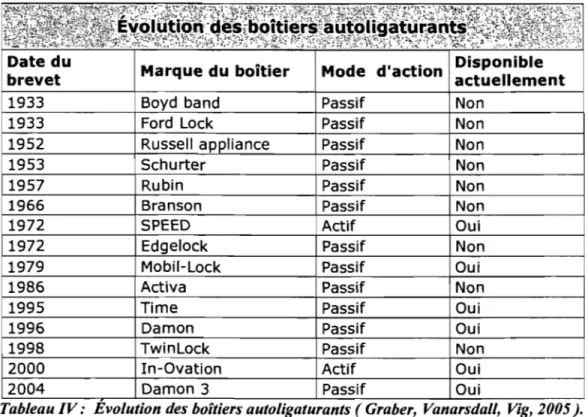
Très peu de temps après James W Ford proposa le Ford Lock design. La dimension de ces boîtiers étant exagérée et leurs coûts de production exorbitants, ils n'ont jamais franchi l'étape de la commercialisation. Il fallut attendre l'arrivée des boîtiers Edgelock, en 1972, pour qu'un système auto ligaturant soit distribué commercialement'à grande échelle. Le tableau IV illustre le développement des boîtiers autoligaturants.
Date du brevet 1933 1933 1952 1953 1957 1966 1972 1972 1979 1986 1995 1996 1998 2000 2004 Marque du boîtier Boyd band Ford Lock Russell ap liance Schurter Rubin Branson SPEED Edgelock Mobil-Lock Activa Time Damon TwinLock In-Ovation Damon 3
Mode d'action Disponible actuellement Passif Non Passif Non Passif Non Passif Non Passif Non Passif Non Actif Oui Passif Non Passif Oui Passif Non Passif Oui Passif Oui Passif Non Actif Oui Passif Oui
Tableau IV: Evolution des boîtiers autoligaturants (Graber, Vanarsdall, Vig, 2005
J.
2.6.2.4 Les boîtiers linguaux
Une des principales barrières aux traitements orthodontiques, surtout chez l'adulte, est sans aucun doute la visibilité des appareillages sur la surface labiale des dents. L'introduction dans les années 1970 des systèmes de collage à la surface de l'émail a rendu possible l'utilisation d'attachements linguaux. En théorie, il est possible d'obtenir le même contrôle tridimensionnel dans les mouvements coronaires et radiculaires, mais la distance inter-boîtiers réduite est un problème majeur en orthodontie linguale. Bien qu'un traitement complet de malocclusion puisse être accompli avec les appareils linguaux, la difficulté, la durée et donc le coût d'un tel traitement sont significativement augmentés. Malgré des progrès considérables dans ce domaine, l'emballement initial de la nouveauté a vite fait place aux contraintes et limitation de la réalité (Proffit, 2007). Leur très faible popularité en Amérique du Nord explique l'absence de ce type de boîtier dans l'étude actuelle.
2.6.2.5 Les boîtiers esthétiques
Coller des boîtiers sur les surfaces linguales représente une façon d'améliorer l'esthétique d'un traitement orthodontique avec appareils fixes. Une autre façon de faire, est de coller les boîtiers sur la surface buccale, mais de les rendre le moins visibles possible.
C'est ce que les boîtiers en plastique et en céramique permettent de faire. Les premiers boîtiers esthétiques sont arrivés sur le marché dans les années 1970. Il s'agissait à cette époque de boîtiers en plastique. Ce matériau était, malheureusement, caractérisé par des inconvénients majeurs: les boîtiers décoloraient, brisaient et, de plus, offraient beaucoup plus de résistance aux mouvements de glissement sur les fils d'acier inoxydable.
Le développement des boîtiers en céramique dans les années 1980 améliora grandement les performances cliniques des appareils esthétiques. En 1991, les études de Holt et al. ont démontré que ces boîtiers sont assez résistants pour supporter les forces orthodontiques. Même s'ils étaient loin d'être parfaits, les boîtiers en céramique démontraient une stabilité de couleur très acceptable et les patients appréciaient leurs qualités esthétiques. Dès leur commercialisation, la popularité des boîtiers en céramique était si grande que l'utilisation des appareils linguaux déclina rapidement. Il fut cependant rapidement évident que le seul véritable avantage des boîtiers en céramique se rapportait à l'esthétique. Leurs dimensions, les dommages possibles à l'émail lors de leur retrait et surtout la friction plus élevée sont des problèmes potentiels de ce type de boîtier.
2.7 L'importance du troisième ordre en orthodontie
En 1977, Steyn appliqua des forces aux racines de dents antérieures dans un modèle d'acrylique afin de mesurer le stress développé dans le fil auquel les dents étaient ligaturées. Nikolai et Wagner, 1985 donnent deux définition possibles au torque: 1) Contrôle ou changement de l'inclinaison labio-linguale de la couronne et 2) Montant de force de torsion appliquée à un fil
orthodontique durant son engagement (insertion) dans le boîtier. Un torque adéquat améliore la qualité du traitement orthodontique et prévient les dommages causés aux tissus (Meling, Odegaard, 1997). De plus, une inclinaison bucco-linguale correcte tant pour les dents antérieures que postérieures est essentielle afin d'obtenir une relation occlusale adéquate, un sourire esthétique et une bonne stabilité à long terme (Gioka, Eliades, 2004). En effet, le torque des incisives maxillaires est crucial dans l'établissement d'un sourire harmonieux, d'une guidance antérieure fonctionnelle et d'une relation canines et molaires de classe 1.
De plus, une inclinaison insuffisante prive l'arcade d'espace potentiel, puisqu'il a été démontré que pour 5° d'inclinaison (torque coronaire labial) supplémentaire, environ 1 mm de longueur d'arcade est généré (O'Higgins et al, 1999). Aussi, des segments postérieurs supérieurs « sous torqués» ont un effet de constriction sur le maxillaire et ne permettent pas une bonne relation cuspides à fosses entre les dents supérieures et inférieures (Gioka, Eliades 2004). Il faut noter que le torque des incisives détermine la position antéro-postérieure du point A céphalométrique; des racines trop labiales auront tendance à repositionner le point A plus antérieur (Van der Linden, 1971).
Malgré le nombre impressionnant de données, empiriques et scientifiques, sur l'importance d'un torque adéquat, il existe une variabilité déroutante dans les « prescriptions» de torque, principalement au niveau des antérieures supérieures, selon les différents concepteurs.
Par exemple, pour les incisives centrales supérieures, le torque incorporé dans les boîtiers va de 12° pour Roth à 22° pour la philosophie bioprogressive (Proffit 2007). Un tel manque d'uniformité dans les valeurs de torque ne peut être que partiellement expliqué par des préférences individuelles dans la position des dents. Nous discuterons donc, dans les prochaines sections des variables pouvant affecter l'expression du torque dans un système « edgewise » de boîtiers pré-ajustés.
2.8 Variables affectant l'expression des forces de torsion (torque)
2.8.1 Morphologie coronaire et positionnement des boîtiers.
Toutes choses étant égales par ailleurs, lorsqu'un orthodontiste utilise des boîtiers préajustés, c'est la position du boîtier sur la dent qui déterminera sa position finale en terme de tip, de torque et de hauteur (Carlson, Johnson, 2001). Alors, selon plusieurs auteurs (Taylor et Cook 1992 ; Creekmore et Kunik 1993) la position finale de la dent réside dans le boîtier et ne requiert pas de pliage de fil puisque tout est programmé dans le boîtier. En effet, si le boîtier est mal positionné ou si la couronne de la dent ne correspond pas à la moyenne pour laquelle le boîtier a été développé (Meyer et Nelson 1978; Creekmore et Kunik 1993) , alors la position finale de la dent ne sera pas optimale. En ce sens, afin d'exprimer de façon optimale la prescription intégrée, on propose aussi une hauteur à laquelle le boîtier doit être collé sur la surface labiale de la dent, qui varie entre 4,0 mm et 5,0 mm à partir du bout incisif des incisives (Ricketts, 1976; Alexander, 1983 ; Bennett et McLaughlin, 1997).
Prenant en considération certaines études (Balut, 1992 ; Taylor et Cook, 1997) qui affirment qu'un clinicien peut coller un boîtier à 0,5 mm de précision, la position d'un boîtier sur une incisive supérieure peut varier de 3,5 mm à 5,5 mm du bout incisif.
De plus, il arrive qu'un orthodontiste décide intentionnellement de tricher un peu sur le positionnement, « misbracketing », pour accentuer la correction d'une dimension de la malocclusion. Par exemple, Creekmore et Kunik (1993) suggèrent une modification du positionnement des boîtiers pour les cas de surplomb vertical exagéré, pouvant résulter en une différence de hauteur de 1,0 mm. Aussi, les cliniciens parlent souvent de collage différentiel pour corriger une courbe de Spee exagérée ou pour contrôler une malocclusion comportant une tendance à la béance antérieure. Mais, évidemment, toutes ces suggestions auront un effet sur l'expression du torque et, donc, sur la position finale de la dent. Afin d'obtenir de bons résultats de traitement avec les boîtiers préajustés, sans devoir plier de fil, deux conditions essentielles doivent être remplies. La première et la plus importante: les boîtiers doivent être collés de façon précise, c'est-à-dire, à un endroit spécifique sur la surface labiale ou buccale de chaque type de dent afin de permettre l'expression désirée des mouvements de deuxième et de troisième ordres.