HAL Id: dumas-01835780
https://dumas.ccsd.cnrs.fr/dumas-01835780
Submitted on 11 Jul 2018
HAL is a multi-disciplinary open access archive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come from teaching and research institutions in France or abroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des établissements d’enseignement et de recherche français ou étrangers, des laboratoires publics ou privés.
ZEB-REVO : étude d’un scanner dynamique mobile et
des ses applications au sein d’un cabinet
Bastien Ricard
To cite this version:
Bastien Ricard. ZEB-REVO : étude d’un scanner dynamique mobile et des ses applications au sein d’un cabinet. Sciences de l’ingénieur [physics]. 2017. �dumas-01835780�
CONSERVATOIRE NATIONAL DES ARTS ET METIERS
ECOLE SUPERIEURE DES GEOMETRES ET TOPOGRAPHES
___________________
MEMOIRE
présenté en vue d'obtenir
le DIPLOME D'INGENIEUR CNAM
SPECIALITE : Géomètre et Topographe
par
Bastien RICARD
___________________
ZEB-REVO : étude d’un scanner dynamique mobile
et des ses applications au sein d’un cabinet
Soutenu le 30 juin 2017
_________________
JURY
PRESIDENT :
M. Jérôme VERDUN
Président
MEMBRES :
M. Lionel GUILLET
Maître de stage
2
Remerciements
Je tiens tout d’abord à remercier mon maître de stage Monsieur Lionel GUILLET qui m’a chaleureusement accueilli dans son entreprise. Il m’a apporté toute son expérience et ses conseils avisés pour mener à bien ce travail de fin d’études.
Je souhaite également remercier Monsieur Jérémie LATGE, géomètre-expert responsable de l’agence de Castanet-Tolosan pour son soutien tout au long du stage et l’intérêt qu’il a porté à mon sujet de stage.
J’adresse un merci tout particulier à Messieurs Lionel LAJARRETIE et Mathieu ESCUDIE, les techniciens du bureau de Castanet-Tolosan, pour les moments passés ensemble et leur soutien bienveillant.
Merci aussi à l’ensemble des personnes travaillant chez Géo Sud Ouest pour leur sympathie durant ces cinq mois de stage.
Je terminerai en remerciant vivement Monsieur Ghyslain FERRE, mon professeur référent, pour sa disponibilité ainsi que nos échanges constructifs et précieux.
Enfin, je tiens à mentionner mes parents et ma sœur qui ont toujours cru en moi, ainsi que Marielle CAZALIS, toujours présente, et dont les encouragements me sont précieux.
3
Liste des abréviations
MLS : Mobile Laser Scanning
GNSS : Global Navigation Satellite Système PLS : Personal Laser Scanning
MEMS : Micro Electro Mechanical Systems – Micro systèmes électromécaniques
IMU : Inertial Measurement Unit – Unité de mesure inertielle
SLAM : Simultaneous Localization And Mapping – Localisation et cartographie simultanées
Laser : Light Amplification by Stimulated Emission of Radiation - Amplification de lumière par émission stimulée de rayonnement
4
Table des matières
Remerciements ... 2
Liste des abréviations ... 3
Introduction ... 5
1.
Description du ZEB-REVO ... 7
1.1 PRESENTATION DU SYSTEME ... 7
1.2 FONCTIONNEMENT DE LA TECHNOLOGIE GEOSLAM ... 8
1.3 PRINCIPE DE LA MESURE... 9
1.4 TRAITEMENT DES DONNEES ... 9
1.4.1 LOGICIEL ZEB1UPLOADER ... 9
1.4.2 LOGICIEL GEOSLAMDESKTOP ... 12
1.5 AVANTAGES ET INCONVENIENTS ... 15
1.6 LA ZEB-CAM ... 17
1.7 COMPARAISON AVEC D'AUTRES SCANNERS DYNAMIQUES ... 18
1.7.1 COMPARAISON AVEC LE ZEB1 ... 19
1.7.2 COMPARAISON AVEC LE FARO SCANNER FREESTYLE 3D ... 21
1.7.3 COMPARAISON AVEC LE LEICA PEGASUS :BACKPACK ... 21
2.
Tests et analyses ... 22
2.1 REALISATION DE TESTS ET ENSEIGNEMENTS ... 22
2.1.1 VITESSE DE LEVE ... 22
2.1.2 PRECISION RELATIVE ... 23
2.1.3 TECHNIQUES DE LEVE ... 24
2.2 CONTROLE ... 34
2.3 NETTOYAGE DU NUAGE DE POINTS ... 36
2.4 MODE OPERATOIRE ... 38
2.5 COMPARAISON AVEC LES MESURES D’UN SCANNER STATIQUE : LE FARO FOCUS X330 ... 39
2.5.1 ETUDE SUR LES PRECISIONS ... 39
2.5.2 RENDEMENT FINANCIER ... 41
3.
Nouvelles applications ... 43
3.1 COMPARAISON ENTRE UN LEVE EN EXTERIEUR ET EN INTERIEUR ... 43
3.2 APPLICATIONS A DEVELOPPER AU SEIN DE L’ENTREPRISE ... 44
3.2.1 LEVE DE PISTE ... 44
3.2.2 LEVE FORESTIER ... 45
3.2.3 PLAN DE MASSE ... 47
3.2.4 CALCUL DE CUBATURES ... 48
3.2.5 CHAMBRE DE VANNES ... 49
3.3 RECALAGE DE PLUSIEURS NUAGES DE POINTS ... 49
3.4 RATTACHEMENT AU SYSTEME LEGAL D’UN NUAGE DE POINTS ... 50
3.5 AMELIORATIONS POSSIBLES DU SYSTEME ... 53
Conclusion ... 55
Bibliographie ... 56
Liste des figures ... 57
5
Introduction
Présentation de l’entreprise d’accueil
J’ai réalisé mon stage de fin d’études au sein de l’entreprise Géo Sud Ouest, une SARL de géomètres experts dont le siège social se situe à Castres (81). Ce cabinet est né de l’association de M.DUHEM et de M.GUILLET au 1er janvier 2013.
Géo Sud Ouest est une société comptabilisant près de 23 collaborateurs répartis sur 5 sites dans le Sud Ouest de la France : Albi, Castres, Mazamet (81) ainsi que Narbonne (11) et Castanet-Tolosan (31). Cet établissement réalise des prestations variées : cela comprend les domaines du foncier, de l’architecture, de la topographie, de l’urbanisme…
A mon arrivée, l’entreprise était déjà propriétaire d’un scanner laser statique, le Faro Focus X330 et d’un scanner mobile, le ZEB-REVO de GeoSLAM objet de mon étude. Ces appareils sont utilisés avant tout pour réaliser des relevés d’intérieurs et des travaux d’architecture. La clientèle du cabinet est diversifiée et comprend des particuliers, des personnes publiques mais aussi des entreprises.
Contexte de l’étude
Aujourd’hui, les méthodes de levés tridimensionnels permettent de répondre à presque toutes les missions du géomètre. C’est un élément devenu essentiel au sein d’un cabinet. La lasergrammétrie, utilisée principalement en mode statique, évolue avec le développement de systèmes mobiles.
Les premiers scanners laser terrestres mobiles sont apparus il y a une dizaine d’années sous la forme de scanners embarqués sur des voitures. Aujourd’hui, de nouveaux instruments mobiles sont utilisés comme les drones, des chariots ou même l’homme lui-même. Ces systèmes sont capables de numériser de vastes zones en un temps réduit.
Ainsi les cabinets de géomètres s’équipent de plus en plus de matériel d’acquisition de données 3D permettant de modéliser un environnement. Les techniques d’acquisition tridimensionnelle ont tendance à se développer très rapidement et il est important de ne pas se laisser distancer et donc de se mettre régulièrement à jour dans ce domaine. Les principaux systèmes de balayage laser mobile offrent des solutions plus rapides et plus rentables que les lasers scanners statiques. Les MLS (Mobile Laser Scanning) utilisent une technologie qui combine un outil de navigation lui permettant de déterminer la position du scanner et le scanner qui collecte des données 3D de son environnement. Ces systèmes sont généralement constitués d’un scanner laser, d’un support modulable ou non et d’un mécanisme de détermination de positionnement et d’orientation comme un récepteur GNSS (Global Navigation Satellite System) et/ou une centrale inertielle.
Dans cette étude, nous allons nous intéresser à un nouveau système de scanner 3D appelé Personal Laser Scanning (PLS). Cette catégorie a vu le jour aux débuts des années 2010 et elle correspond aux instruments portables à main ou de type sac à dos. Peu d’ouvrages ou d’études ont, pour le moment, abordé sur ce sujet.
6 Problématique
L’arrivée de ce nouveau mode d’acquisition nous amène à nous questionner :
Comment ces nouveaux venus bouleversent-ils la hiérarchie des scanners lasers ? Peuvent-ils les remplacer pour toutes sortes de travaux ? Quels sont véritablement leurs atouts et sont-ils rentables ?
L’entreprise Géo Sud Ouest consciente de ces enjeux a fait l’acquisition d’un scanner laser portable du constructeur GeoSLAM : le ZEB-REVO. Le défi est dans un premier temps de comprendre la façon dont fonctionne le système puis de déterminer les conditions les plus favorables qui permettraient de répondre aux attentes de l’entreprise. Il faut ensuite, vérifier la cohérence des mesures et leur précision par des comparaisons. Ces dernières seront effectuées à partir des travaux réalisés en entreprise et par différents moyens, techniques ou matériels. L’objectif final de ce travail d’études, est de déduire les types de chantier pour lesquels cet appareil est utilisable et donc plus rentable financièrement qu’une autre méthode de levé.
7
1.
Description du ZEB-REVO
1.1
Présentation du système
Le ZEB-REVO est un hand-held mobile mapping, c’est-à-dire un scanner 3D mobile portable à main de la marque GeoSLAM.
Cette entreprise a été fondée en 2012 à l’Est de Nottingham au Royaume-Uni sous la forme d'une coopération entre CSIRO (l'Agence nationale de la science australienne) et 3D Laser Mapping (entreprise mondiale de solutions 3D LIDAR). Initialement, GeoSLAM était le fabricant et le revendeur du scanner laser portatif ZEB1, puis la société a connu une croissance rapide qui intègre maintenant un réseau mondial de distributeurs desservant 32 pays sur 6 continents. Le ZEB-REVO a été lancé en mars 2016 et commercialisé en novembre 2016.
Les scanners lasers utilisent des traitements de signaux pour calculer la distance séparant l’émetteur de l’obstacle. Connaissant la direction visée par l’appareil, on obtient alors la position dans l’espace tridimensionnel de l’obstacle rencontré. En répétant cette opération dans de multiples directions, on obtient un nuage de points 3D décrivant l’espace exploré par l’appareil.
Le ZEB-REVO est composé d’un sac à dos et d’une « tête » reliés entre eux par un câble.
Figure 1 : Photographies du ZEB-REVO - Source personnelle
Le sac à dos pèse 3,1kg et le scanner seulement 1kg. A l’intérieur de la « tête » de l’appareil se situe un capteur laser scanner à mesure de distance par décalage de phase permettant de prendre près de 40 000 points/seconde et des capteurs de mesures inertielles. Le sac à dos est lui composé d’une mémoire de stockage et d’un calculateur de la centrale inertielle permettant de reconstituer la trajectoire et les mouvements de la tête. La technologie GeoSLAM permet de combiner les mesures du scanner et de la centrale inertielle.
Avec son approche modulaire, le ZEB-REVO peut-être monté sur des voitures, des bateaux, des drones et des véhicules pilotés à petite échelle. Il doit être utilisé entre 0 et 50°C et avec moins de 85% d’humidité. Son utilisation est donc impossible sous la pluie et par des températures négatives comme à l’extérieur en hiver. La batterie a une autonomie un peu supérieure à 4 heures, ce qui lui permet facilement d’être utilisable pendant toute une demi-journée. La capacité de stockage est de 55GB soit un équivalent de plus de 90 heures de scan (une minute de scan étant équivalent à 0,01GB).
8
1.2
Fonctionnement de la technologie GeoSLAM
Le ZEB-REVO fonctionne avec la technologie dite « SLAM ». SLAM est l’acronyme de Simultaneous Localization And Mapping. C’est un procédé permettant de réaliser des mesures dans le but d’obtenir une représentation d’un environnement et de se localiser dans celui-ci. Elle est née dans l’industrie de la robotique.
La technologie GeoSLAM couple des mesures inertielles MEMS et des mesures d’un scanner laser. Le scanner laser est un appareil d’acquisition 3D. Les mesures sont basées sur une technique d’observation à distance fondée sur l'analyse des propriétés d'un laser renvoyé vers son émetteur. Les mesures inertielles MEMS, acronyme de Micro Electro Mechanical Systems, sont des dispositifs miniaturisés combinant plusieurs principes physiques. Utilisé en tant que capteur, un MEMS possède une partie mobile sensible à la variation d’une grandeur physique : c’est ce que l’on appelle une centrale inertielle. Cette variation est alors traduite en une grandeur électrique, analysée ensuite par la partie électronique du MEMS.
Une centrale inertielle ou IMU (Inertial Measurement Unit) est un ensemble de capteurs permettant de mesurer le mouvement qui n’utilise aucune information extérieure au mobile. On parle de centrale à inertie lorsque l'on cherche à mesurer l'ensemble de six grandeurs physiques de la cinématique : les trois accélérations linéaires grâce à un accéléromètre et les trois vitesses angulaires ou vitesses de rotation grâce au gyromètre. L’utilisation combinée de ces différents capteurs présente l’avantage d’obtenir une information de localisation complète. En effet, partant d’une position de départ, il est possible de connaitre la position, la vitesse, le cap, la rotation, ainsi que l’accélération d’un objet en mouvement. Un autre avantage est l’indépendance des centrales inertielles, puisqu’il n’est pas nécessaire d’avoir recours à un dispositif extérieur pour obtenir la localisation d’un mobile. Enfin, leur cadence de fonctionnement ainsi que leur compacité sont des atouts. C'est la même technologie qui est utilisée dans les avions ou les voitures autonomes par exemple.
L'IMU est utilisée pour estimer une position initiale et pour recréer la trajectoire dans l’environnement grâce au calculateur. Afin d'optimiser davantage la trajectoire et de limiter toute dérive de l'IMU, une boucle fermée est réalisée. Cependant, il est possible de ne pas revenir au point de départ mais dans ce cas précis il faudra bien l’indiquer lors des calculs. L'estimation de position est relative au point de départ et aux points de recalage tout au long du scan : ce sont les éléments de surface. Donc le calculateur prend aussi en compte les points scannés et les fait correspondre aux surfaces ou objets déjà levés. Pour que l’algorithme puisse trouver des points communs entre différentes périodes de scans, il faut des caractéristiques significatives. Par exemple pour un levé à une portée de 5 mètres, les objets peuvent être des caractéristiques significatives s’ils mesurent plus de 50 centimètres. Il existe donc un rapport de 1 :10 entre la portée et la dimension de l’objet à respecter. L’ensemble de ces informations permet ensuite au calculateur de corriger et de lisser l'estimation de la trajectoire. Suite à ce processus itératif, le nuage de points final est recréé sur la base de la nouvelle trajectoire. Le résultat généré est une représentation cohérente de l’environnement du ZEB-REVO.
9 Pour calculer sa trajectoire, le ZEB-REVO ne pourrait utiliser que les données d’une seule technologie soit celle de la centrale inertielle soit celle des éléments de surfaces communs. En couplant l’utilisation de ces deux méthodes, le calculateur a une abondance d’informations qu’il recoupe et qui lui permet d’effectuer un meilleur contrôle de sa trajectoire.
1.3
Principe de la mesure
Au départ, cet appareil est utilisé pour réaliser des opérations en intérieur. C’est d’ailleurs pour cela que l’entreprise Géo Sud Ouest l’a acheté, son principal objectif est de l’utiliser pour calculer des surfaces ou établir des plans de copropriété.
Le but de cet appareil est de pouvoir lever toutes les situations rapidement en 3D. Le mode opératoire préconisé par GeoSLAM est le suivant.
Il faut commencer par poser la tête du ZEB-REVO sur une surface plane mais pas forcément horizontale.
Ensuite, pour démarrer le scan, on allume l’appareil et on pivote la tête de l’appareil de 180°. C’est à ce moment là que démarre l’initialisation. Il faut attendre que la led sur le côté de la tête soit verte pour appuyer sur le bouton de la tête afin de commencer le levé. Si on le souhaite, on peut aussi activer la ZEB-CAM au même moment.
Pendant le levé, selon la notice, il faut passer les portes en marche arrière, marcher lentement, se tenir à une portée inférieure de 30m à l’intérieur et de 15m à l’extérieur. Il est aussi recommandé de placer des objets dans des pièces vides ou contre des murs nus (par exemple : couloirs) pour éviter une dérive possible de la centrale inertielle et de recaler les points entre eux. Le lever ne doit pas durer plus de 30 minutes.
Une fois le levé fini, il faut reposer la tête du ZEB à l’endroit du départ. Après deux-trois tours de tête, on appuie sur le même bouton qu’au début du scan. Pendant une quinzaine de secondes après la fin du levé, il ne faut surtout pas déplacer l’appareil car il est en train de se désinitialiser. Ensuite, l’appareil compresse le scan pour le stocker dans la mémoire.
Après cette courte période, le câble auxiliaire et sa clef USB peuvent être branchés pour le transfert des données. Si l’utilisateur souhaite recommencer un levé, il suffit de tourner de 180 degrés la tête du ZEB-REVO.
Cette méthode peut être perfectible et adaptée suivant les missions que le géomètre a à remplir. Suite à plusieurs tests, nous verrons dans la deuxième partie le mode opératoire qui convient le mieux.
1.4
Traitement des données
1.4.1 Logiciel Zeb1 Uploader
Les données envoyées au serveur anglais de GeoSLAM par l’intermédiaire du logiciel Zeb1 Uploader ont comme extension .param et .bag. Elles contiennent des informations sur les points et les conditions du levé.
10
Figure 2 : Interface du logiciel Zeb1 Uploader
Après avoir payé avec des crédits, le serveur nous renvoie des fichiers .ply correspondant à la trajectoire réalisée et au nuage de points sous-échantillonné ainsi qu’un fichier .laz représentant l’ensemble du nuage de points.
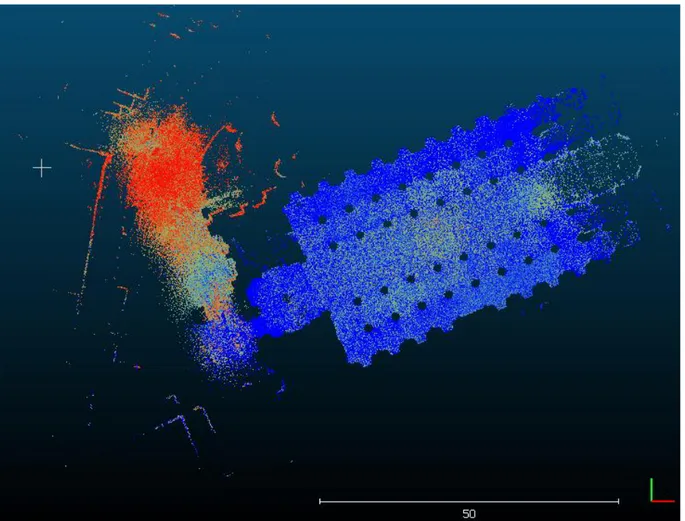
11 A la fois dans le cas de l’envoi et de la réception, l’échange des données est réalisé en compressant les fichiers regroupés dans un fichier .zip. Le fichier qui nous intéresse le plus est le nuage de points en .laz que l’on pourra traiter avec la majorité des logiciel de traitement de nuage de points 3D. Il reste tout de même le problème du contrôle. En effet, une fois les données exportées de l’appareil, nous n’avons aucun moyen de vérifier si le calcul a bien fonctionné. Il faut donc dans tous les cas payer pour voir le résultat, avec un prix d’environ 1 crédit pour 2m3 levés (1 crédit valant 0,50€). Un des fichiers .ply qui nous est renvoyé par GeoSLAM est un nuage de point colorisé par un dégradé du bleu au rouge représentant les conditions de levé. Ce nuage est visible grâce au logiciel CloudCompare. Les points en rouge représentent les régions où le processus du calcul de l’algorithme de calcul GeoSLAM a éprouvé des difficultés (réflectance faible et insuffisance du nombre d’éléments de surface), en bleu : les points calculés facilement. Il nous permet de détecter plus rapidement les endroits où la centrale inertielle a pu dériver.
Figure 4 : Fichier au format .ply représentant les conditions du levé
Ce nuage de points du relevé de la basilique Saint Sernin à Toulouse nous indique les points dont le calcul a été plus ou moins difficile. La totalité de ces points se situent à l’extérieur. La couleur rouge s’intensifie lorsque les conditions s’appauvrissent. Cela indique qu’il y a peu d’éléments de surface et que la réflectivité est plus faible qu’à l’intérieur où l’ensemble des points sont colorisés en bleu.
12
1.4.2 Logiciel GeoSLAM Desktop
Géo Sud Ouest a acheté, au cours de mon TFE, le logiciel Desktop V3, plus rentable que l’utilisation de Zeb1 Uploader. En effet, une fois acheté, ce logiciel n’utilise pas de crédit. Les calculs sont donc réalisés directement en local (pas de connexion internet requise). Il permet à l’utilisateur d’intervenir sur les paramètres permettant le calcul de nuage de points.
Propriétés des fichiers en sortie
Ce logiciel permet d’obtenir des résultats personnalisés. L’utilisateur a plusieurs choix à faire. Il peut notamment décider du format du nuage de points en sortie. Pour gagner du temps au bureau et éviter d’accumuler les manipulations de fichiers parfois lourds, on pourra, contrairement au logiciel Zeb1 Uploader choisir un fichier .e57 (utilisable dans le logiciel Scene de Faro).
Figure 5 : Choix du type de fichier en sortie du logiciel GeoSLAM Desktop V3
Ensuite, l’utilisateur pourra faire d’autres choix concernant la colorisation du nuage, le sous-échantillonnage, visualiser la vue d’ensemble ou encore l’importation de fichiers vidéo capturés avec la ZEB-CAM.
13 Options de calcul
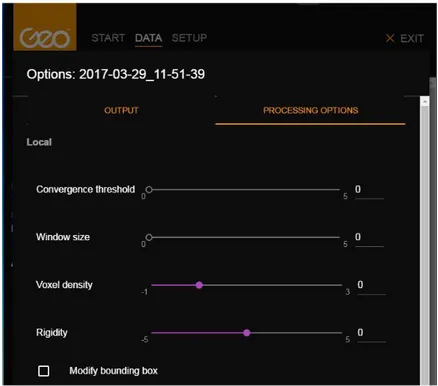
En ce qui concerne le calcul, l’utilisateur doit dans un premier temps régler les paramètres locaux. Ces paramètres correspondent au calcul que le logiciel réalise petit à petit.
Figure 6 : Choix des paramètres locaux de calcul dans l’interface du logiciel GeoSLAM Desktop V3
Il est possible de jouer sur le seuil de convergence, c’est-à-dire que si l’on augmente ce paramètre, on augmente le nombre d’itérations de chaque étape de reconnaissance de points communs entre deux instants t et t+1 et on baisse le seuil de convergence. Cette opération peut permettre d’affiner le résultat et de s’assurer de la validité des points communs.
L’usager peut obliger l’algorithme à prendre des échantillons plus importants de données. Il va augmenter son champ d’application pour trouver des éléments de surface communs. Cela peut aider à consolider le calcul mais amène une augmentation du temps de traitement.
Ensuite, le Voxel (contraction de « volume » et de « élément ») de l’algorithme peut être augmenté. Dans ce cas-là, le calcul prendra en compte plus de points dans un même volume et permettra donc de détecter plus de détails pour les faire correspondre ensemble.
L’utilisateur peut modifier les paramètres de rigidité. L’algorithme sera donc soit majoritairement influencé par les données de la centrale inertielle, soit par la reconnaissance des éléments de surfaces. C’est le paramètre majeur du calcul, il peut influencer significativement le résultat.
Un dernier paramètre local permet de fixer les dimensions de la zone limite, autour de la tête du ZEB-REVO, dans laquelle les points sont ignorés. Cela peut concerner les mesures influencées par des piétons ou des véhicules qui sont passés entre l’appareil et l’objet à scanner. A l’inverse, on pourra réduire cette zone lorsque le levé se déroule dans des endroits exigus.
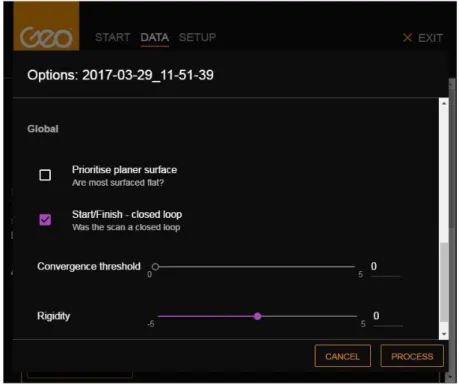
14 Dans un deuxième temps, l’utilisateur doit régler les paramètres globaux du calcul. Ceux-ci n’interviennent qu’après les calculs réalisés en local. Ils permettent de s’assurer de la conformité de l’ensemble du levé.
Figure 7 : Choix des paramètres globaux de calcul dans l’interface de GeoSLAM Desktop V3
On peut favoriser l’utilisation de surfaces planes dans le calcul de l’algorithme. Cette fonction sert à l’enregistrement de très grands ensembles de données, à condition qu’il y ait une majorité de surfaces planes tout au long du levé et au point de fermeture de la boucle.
Ensuite, l’usager doit indiquer au logiciel si, sur le terrain, il a pu fermer la boucle. Si cela est le cas, il faut savoir que l’algorithme sera forcé de lier les points de départ et de fin. Cela permet d’éviter certaines erreurs de dérive de l’IMU et permet un contrôle sous forme de « points doubles » comme en levé traditionnel.
Et enfin, on peut jouer, comme pour les paramètres locaux, sur le seuil de convergence et la rigidité globale.
Si le résultat initial ne convient pas, il est toujours possible de relancer un calcul en changeant ces nombreux paramètres pour les adapter au mieux à l’environnement levé. Avec Geoslam Desktop V3, les calculs sont illimités et gratuits, ce qui est un gros avantage sur le logiciel Zeb1 Uploader. Il est aussi possible d’installer ce logiciel sur un ordinateur portable et de vérifier directement sur le terrain (pas de connexion internet nécessaire, contrairement au Zeb1 Uploader) si le calcul fonctionne. Il faut savoir que pour un scan de 30 minutes, le temps de calcul, d’environ 30 minutes, est sensiblement le même pour les deux logiciels.
Pour le traitement du dessin, nous utilisons le logiciel PointCab qui permet de réaliser des coupes et des plans à partir du fichier .las.
15
Figure 8 : Plan vu du dessus représentant le bureau de Castanet-Tolosan réalisé avec PointCab
Ensuite, nous importons les images résultant dans un logiciel de DAO, comme par exemple Autocad, et nous digitalisons manuellement ce qui nous intéresse. Cette méthode, qui s’appelle aussi la vectorisation, permet un tracé rapide de n’importe quel relevé. En ce qui concerne les plans d’intérieur, la vectorisation peut être réalisée de façon automatique mais il faut faire attention à bien contrôler tous les segments qui ont été créés. Ils doivent impérativement être reliés entre eux pour construire des pièces fermées et ne doivent représentés que les éléments nécessaires au plan. L’entreprise Géo Sud Ouest ne réalise principalement que des rendus en 2D (plans ou coupes) car cela représente la majorité des demandes des clients. Le rendu 3D est que encore peu utilisé par les architectes et les personnes publiques. Cela s’explique par une modélisation longue et des fichiers d’échange très lourds.
1.5
Avantages et inconvénients
Dans un premier temps, on peut se demander quels sont les atouts d’un tel instrument ? Pourquoi est-il annoncé comme une révolution sur le marché des scanners lasers portables ?
16 Les géomètres sont principalement attirés par sa rapidité d’exécution avec la promesse d’un levé d’intérieur dix fois plus rapide qu’avec un distancemètre et un croquis ou qu’avec un scanner statique. Il est aussi très facile d’utiliser cet appareil, même un utilisateur non initié à la topographie ou aux techniques de levé traditionnel peut s’en servir. Il ne demande aucune compétence particulière. Il est aussi facile de le manipuler grâce à sa légèreté et sa maniabilité qui permettent même de scanner des zones difficiles d’accès comme des fonds de placards ou des combles. En plus d’être simple d’utilisation sur le terrain, le traitement et la manipulation des résultats sont très rapides. Les fichiers obtenus sont très légers (pour un levé de 30 minutes la taille du nuage de points est de 0,7Go), il est aisé de créer des coupes ou encore des se déplacer dans le nuage.
Le ZEB-REVO à la capacité d’être monté sur plusieurs supports comme un véhicule ou un drone. Le fait d’être modulable est aussi une qualité très intéressante pour les entreprises ayant ce type de support.
On nous dit également sur la notice que le scanner a un indice de protection IP64, c’est-à-dire que l’appareil est complètement protégé contre les poussières et les projections d’eau. Par contre, on ne peut pas l’utiliser lorsqu’il y a plus de 85% d’humidité et que l’on se trouve en dessous des 0°C. Il existe d’autres inconvénients non négligeables. L’un des principaux est l’absence totale de contrôle sur le calcul. Qu’il soit réalisé avec Zeb1 Uploader ou avec GeoSLAM Desktop V3, le calcul n’est pas directement visible par l’utilisateur. Certes, il peut l’influencer en jouant sur les paramètres du logiciel Desktop V3, mais le résultat est incertain. Dans certaines conditions, le calcul ne peut pas être corrigé et le levé est donc faux (sans que l’utilisateur ne sache pourquoi). Cela est souvent dû à une erreur qui entache le protocole.
Dans des endroits homogènes, comme des couloirs ou des murs nus, l’appareil ne peut pas s’appuyer sur les éléments de surfaces communs qui aident l’algorithme à retracer la trajectoire du levé. La conséquence est donc une perte de précision sur la localisation du scanner qui se répercute sur le résultat total. De plus, la centrale à inertie peut dériver lors de cheminements rectilignes trop grand. Le résultat peut aussi souffrir d’imprécision due à une mauvaise détermination de la position de l’appareil.
Au niveau des objets réfléchissants, comme des vitres ou des miroirs, peu de photons émis sur ce genre de surfaces parviennent au récepteur de l’appareil. Ces objets vont seulement réfracter la lumière et vont donc donner de mauvaises informations sur le faisceau. En effet, l’appareil calcule la distance de l’objet qui se situe à l’opposé du miroir (comme par exemple, le mur d’en face), dans ce cas-là le point sera représenté derrière le miroir à une distance égale entre le miroir et le mur qui lui fait face.
Une difficulté minime est la visualisation des données au bureau. En effet, parfois dans le nuage de points le dessinateur ne peut pas discerner un placard fermé ou un mur. Cela arrive quand le dessinateur n’est pas allé sur le terrain ou qu’il ne souvient plus précisément des détails de l’environnement.
17
1.6
La ZEB-CAM
L’entreprise Géo Sud Ouest a fait l’acquisition de la ZEB-CAM qui a été livrée durant mon stage. Cette petite caméra discrète et légère de la marque GoPro est ajoutée sous la tête du ZEB-REVO.
Figure 9 : Photographie du ZEB-REVO équipé de la ZEB-CAM – Source personnelle
Pendant le levé, elle va enregistrer une vidéo qui pourra être utilisée lors du traitement informatique. Cette vidéo sera décomposée en images par le logiciel GeoSLAM Desktop V3.
Quand l’utilisateur va cliquer sur un point du nuage, l’image correspondante au même temps va s’afficher et inversement. Cette opération est possible grâce à la connexion durant le levé entre la caméra et le scan. Même si le dessinateur n’est pas allé sur le terrain ou s’il a été lui-même opérateur mais qu’il ne se souvient pas de l’ensemble du levé, il pourra voir où se situe dans l’image un point sélectionné.
18
Figure 10 : Viewer du nuage de points avec le logiciel Desktop V3 de GeoSLAM
Cependant, la capture d’image par GoPro ne permet pas de texturer le nuage de points, ce qui rendrait le nuage de points encore plus lisible. Le dessinateur en aurait une utilisation plus facile et rapide. Il faut aussi dire que le temps de calcul prenant en compte la vidéo est multiplié par deux. C’est à l’utilisateur de choisir s’il souhaite effectuer le calcul avec la vidéo et, en cliquant sur un point, voir son image associée ou calculer sans la vidéo et aller chercher la zone dans laquelle se trouve un point directement dans la vidéo.
1.7
Comparaison avec d'autres scanners dynamiques
L’intérêt de Géo Sud Ouest porté sur le ZEB-REVO s’explique par la rapidité d’acquisition des données avec cet appareil. Le but de l’achat de cet appareil était donc de réaliser principalement des mesures en intérieur avec un rendu en 2D. L’autre solution aurait été d’acheter des scanners sur chariots mais ces derniers sont peu pratiques dès lors qu’il y a présence d’escaliers ou de petites pièces. Le comparatif portera donc sur des systèmes d’acquisition dynamiques portables à la main. Ce domaine d’acquisition se développe très rapidement. De nouveaux constructeurs arrivent sur le marché et propose des appareils toujours plus compacts et rapides comme par exemple l’entreprise Kaarta avec son appareil Contour, le système Robin ou encore Microsoft qui, grâce à plusieurs collaborations et rachats de start-ups, lance son sac à dos scanner laser : le UltraCam Panther. Les caractéristiques techniques des appareils fournies par les constructeurs sont issues des mesures réalisées dans des conditions parfaites. Elles sont certainement différentes de celles réalisées dans des conditions réelles de travail quotidien. Les fournisseurs nous donne accès à :
- la précision relative du levé ; - la précision absolue de position ; - la résolution spatiale ;
- la portée des mesures ; - la fréquence des mesures.
19
1.7.1 Comparaison avec le ZEB1
Etant donné que Géo Sud Ouest n’a pas le ZEB1 de GeoSLAM, la comparaison des deux appareils se fera selon les notices.
Figure 11 : Composition du ZEB1, premier appareil de GeoSLAM – Source : 3D laser mapping
Déjà, la première différence est notable au niveau de la méthode de levé. Avec le ZEB1, il faut balancer la tête de l’instrument de gauche à droite, avec le ZEB-REVO, l’appareil tourne automatiquement suivant l’axe x. Ce dernier système est beaucoup plus confortable et le résultat obtenu est un ensemble de points mieux répartis. Au niveau du poids total, le ZEB1 est légèrement plus léger de 500g. En ce qui concerne la précision relative du levé, les deux appareils affichent les mêmes résultats. Il en est de même pour les portées à respecter lors des observations.
Par contre, on observe une différence entre les deux sur la précision absolue de position. Sur le modèle plus récent, le constructeur annonce une précision de la centrale inertielle de 3 à 30 cm au bout de 10 minutes. Sur la notice du ZEB1, il est indiqué 3 à 40 cm au bout de 5 minutes. Nous pouvons donc dire que l’essentiel des améliorations est apporté sur la qualité de la centrale inertielle.
Caractéristiques ZEB1 ZEB-REVO
Poids 3.6kg 4.1kg
Précision relative 2-3cm 2-3cm
Portées Int : 30m – Ext : 15-20m Int : 30m – Ext : 15-20m
Précision absolue de précision 3-40cm pour 5min de levé 3-30cm pour 10min de levé
20 Comparaison sur les angles
Une autre différence observée est le champ de vision angulaire. Sur le ZEB-REVO, il est indiqué : rotation de 270° autour de l’axe Z et de 360° autour d’un axe X. Sur le ZEB1, il est écrit : rotation de 270° autour de l’axe Z et d’environ 150° (manuellement) autour de l’axe X. C’est pour mesurer des points au sol et en hauteur que le scanner doit être balancé. Avec une vitesse de ligne de 100 Hz sur l’axe Z, le ZEB-REVO produit 2,5 fois plus de lignes de balayage en une seconde autour de l’axe Z que le ZEB1 (40Hz).
Résolution du ZEB-REVO
Le problème est que, sur la notice le ZEB-REVO a une résolution horizontale de 0,625° alors que le ZEB1 a une résolution horizontale de 0,25°. On remarque que si on fait le rapport, on retrouve le même coefficient que celui de la vitesse de ligne. On peut donc dire qu’avec le ZEB1 on obtiendrait autant de points à l’horizontale dans un même laps de temps qu’avec le ZEB-REVO.
Résolution ZEB1 ZEB-REVO
Horizontale 0,25° soit 4,36x10-3 rad 0,625° soit 10,91x10-3 rad
Verticale 3,5° soit 61,09x10-3 rad 1,8° soit 31,42x10-3 rad
Tableau 2 : Résolutions du ZEB1 et du ZEB-REVO
Avec le ZEB-REVO, en se plaçant à 1 mètre de l’objet à scanner, entre deux points on a une résolution horizontale de 1,1cm et une résolution verticale de 3,1cm.
Les fréquences données par le constructeur sont : 0,5Hz pour la rotation d’axe X et de 100Hz pour la rotation d’axe Z. Ce qui nous donne un tour entier de la tête du scanner suivant l’axe X en 2 secondes et un « aller-retour » du laser suivant l’axe Z en 1ms. Cette fréquence rapide permet à l’instrument de multiplier le nombre de points sur une ligne horizontale, la résolution est donc augmentée. 432 points sont pris en une milliseconde sur une ligne horizontale, puis l’appareil tourne suivant l’axe X de 1.8° et en 1ms, 432 autres points sont pris ainsi de suite pendant 2 secondes pour que la tête fasse un tour entier suivant l’axe X. En 2 secondes, le scan aura pris 86400 points. Pour une meilleure résolution, il suffit de se déplacer plus lentement.
Les comparaisons suivantes ont été réalisées avec des produits similaires vendus par les grands constructeurs de scanners laser 3D.
Y Z
21
1.7.2 Comparaison avec le Faro Scanner Freestyle 3D
La portée du FARO Freestyle3D doit être comprise entre 50cm et 3m pour un volume de pièce de maximum 8 m³. A 1m de l’objet à scanner, la précision indiquée par le constructeur est de 1mm. Pour une meilleure exploitation des données, il est capable de coloriser le nuage de points.
Figure 13 : Photographie de l’utilisation du Scanner Freestyle 3D de Faro – Source : faro.com
Cet appareil ne peut pas être utilisé pour faire un levé à l’extérieur car il lui faut très peu de lumière pour bien fonctionner. Il peut donc seulement être utilisé pour des levés d’intérieur et pour des petites pièces confinées. Il ne peut pas servir pour lever une maison entière par exemple mais il est utile pour compléter des pièces difficiles ou non accessibles au scanner laser statique. Cet appareil ne convient donc pas aux attentes de l’entreprise.
1.7.3 Comparaison avec le Leica Pegasus : Backpack
Ce scanner portable de la marque Leica est capable d’enregistrer près de 600 000 points par seconde pour une portée allant jusqu’à 50m. Par contre, il est très lourd et pèse presque 13kg.
Figure 14 : Photographie de l’utilisation du Pegasus : Backpack de Leica – Source : leica-geosystems.us
L’avantage qu’il a sur le ZEB-REVO est qu’à l’extérieur il peut utiliser des mesures GNSS. Il prend également des photographies qui lui permettent de coloriser le nuage de points. Sur la notice, il est indiqué une précision de position de 5 à 50cm au bout de 10 minutes de levé. Au final, la précision des points 3D est de +/-2 à 3cm. Cette solution n’a pas été retenue par l’entreprise Géo Sud Ouest car la taille du sac à dos est un frein. Il est trop imposant et pour un intérieur, il aurait été compliqué de relever des petits espaces peu accessibles aux personnes comme des placards ou des dessous d’escalier. Cet appareil est également trop cher par rapport à l’appareil de GeoSLAM.
22
2.
Tests et analyses
Un des principaux enjeux de mon travail de fin d’études est la réalisation d’une série de tests afin de contrôler la qualité de l’appareil. Il est important pour l’entreprise de connaître les circonstances dans lesquelles un levé a potentiellement le plus de chance de répondre aux attentes des clients.
2.1 Réalisation de tests et enseignements
2.1.1 Vitesse de levé
Cette première partie vise tout d’abord à relever le bureau de l’entreprise Géo Sud Ouest à Castanet-Tolosan. En effet, cela est plus facile de réaliser plusieurs levés pour comparaison sans avoir à se déplacer : inutile d’utiliser une voiture du cabinet et demander l’avis d’un propriétaire.
La première expérience consiste, tout en respectant les conseils de levé décrits sur la notice de l’appareil, à lever l’intérieur du bureau avec des vitesses de déplacement différentes. La personnalisation et la description précise du mode opératoire final se feront au fur et à mesure de tous les essais. La quantification des résultats s’effectuera sur des endroits précis de pans de mur choisis auparavant sur l’ensemble des nuages obtenus. Nous allons mesurer l’épaisseur du trait correspondant au mur. Les différentes épaisseurs représentent le bruit du scanner laser.
Figure 15 : Plans vus du dessus représentant le levé du bureau à trois vitesses différentes : lente, normale et rapide
La figure 15 représente les trois nuages de points vus du dessus. La pièce n’étant pas très grande, la portée maximale réalisée est de 2m. Le bureau principal de l’agence de Castanet-Tolosan a été relevé au ZEB-REVO avec plusieurs vitesses de déplacement. Le premier nuage a été relevé lentement (10 minutes), en faisant une pause régulièrement. On obtient donc une épaisseur moyenne sur l’ensemble des surfaces des murs de 2cm. Le second nuage a été scanné avec une vitesse dite « normale » (6 minutes), l’opérateur ne s’attarde pas sur des éléments et se déplace à son allure.
23 L’épaisseur moyenne obtenue est de 3,5cm. En ce qui concerne le dernier nuage, le levé a été très rapide (2 minutes). On obtient des traits de murs plus épais que les autres, de l’ordre de 5cm.
On observe que la qualité de la digitalisation des murs dépend fortement de la vitesse avec laquelle les scans sont pris. En marchant lentement le nombre de points sur le mur va augmenter, et avec un nuage plus dense, la précision lors du tracé du trait de dessin est augmentée. Il faut donc adapter sa vitesse de levé au rendu attendu.
2.1.2 Précision relative
La deuxième phase consiste à déterminer les écarts entre deux nuages de points obtenus avec le GeoSLAM dans les mêmes conditions de levé. C’est ce que l’on appelle la précision relative, on cherche l’écart entre deux points de différents nuages se trouvant au même endroit. La quantification des résultats se fera sur des écarts observés sur l’ensemble des points des deux nuages. Pour remplir cet objectif, on va comparer les deux nuages de points grâce au logiciel CloudCompare. Par la suite, l’alignement des deux nuages est réalisé directement par la fonction ‘Finely registers already aligned identities’. Cette opération nous permettra d’extraire automatiquement des écarts (moyenne, minimum et maximum) sur l’ensemble des points. Préalablement à cette analyse, il faut que les différents nuages levés correspondent entre eux. Pour cela, il faut nettoyer les nuages au maximum en supprimant les points qui ne sont pas communs, comme par exemple les points reflétés dans le miroir ou les points sur des objets mobiles.
Malheureusement, cette approche est entachée d’incertitude, puisque les points sélectionnés ne sont pas parfaitement situés au même endroit dans les deux nuages de points. Ceci est dû aux mouvements de la tête du scanner qui font que les données lasers mobiles ne sont pas réparties également. On peut donc dire que plus la densité des nuages de points est faible, plus la sélection de points homologues est difficile.
24 Les deux nuages utilisés ont été mesurés dans les bureaux de l’entreprise à Castanet-Tolosan dans des conditions similaires et à vitesse normale. Après les avoir alignés automatiquement, le logiciel CloudCompare nous permet de coloriser le résultat en fonction des écarts. Les écarts sont représentés par un dégradé de couleur allant du bleu (écart inférieur à 2,5cm) au rouge (écart supérieur à 17,5cm).
Figure 17 : Histogramme de la répartition des écarts en fonction de leur nombre
Sur le graphique correspondant aux écarts entre les deux nuages, on observe que plus de 15 millions de distances ont été mesurées. Sur ces 15 millions de mesures, près de 14 millions d’écarts sont inférieurs à 2,5cm soit environ 93% des distances. Le géomètre peut donc assurer une précision relative de 2,5cm. Ce résultat est conforme à ce qui est indiqué sur la brochure du constructeur GeoSLAM (relative accuracy : 2-3cm).
Pour les écarts qui sont supérieurs à 15cm, ils correspondent aux éléments scannés dans un nuage mais pas dans l’autre. Ces points ne sont pas dus à un défaut de l’appareil et ils peuvent être supprimés.
La moyenne de l’ensemble des écarts est égale à 1,4cm et peut être sensiblement réduite si les points dont les écarts sont supérieurs à 15cm sont supprimés.
2.1.3 Techniques de levé
L’objectif de cette partie est d’identifier ou de contrôler toutes les actions réalisées pendant le levé qui peuvent avoir de l’influence sur le résultat. L’ensemble de ces tests a pour but d’identifier les conséquences des choix de levé et au final, de conclure sur le mode opératoire susceptible de fonctionner le mieux.
25 Augmentation de la durée du scan
La durée maximum de levé conseillée par l’entreprise GeoSLAM est de 30 minutes. Cette limitation est due à deux choses : la perte de précision sur le positionnement par la centrale inertielle et la taille des fichiers. On rappelle que la centrale inertielle permet une précision sur le positionnement qui varie de 3 à 30 cm pour une boucle d’une dizaine de minutes. En allant au-delà d’une demi-heure, l’utilisateur prend le risque d’une trajectoire mal calculée. Nous allons considérer le problème dans deux situations différentes : un environnement riche et un environnement pauvre. A l’intérieur de l’environnement riche, la technologie GeoSLAM pourra s’appuyer sur les éléments de surfaces et se raccrocher à elles pour garder une précision de positionnement correcte. A l’inverse, à l’intérieur d’un environnement pauvre, la dérive de la centrale sera beaucoup plus importante et le calcul des données sera faux.
Pour connaître la déviation de la centrale inertielle, on compare le plan d’un levé au ZEB-REVO au levé topographique, sans prendre en compte les altitudes. Pour cela on utilise la fonction ‘Recalage HELMERT’ de Covadis. On s’appuie sur trois angles de bâti bien distincts. On obtient un écart moyen quadratique de 2cm mais sur un angle de bâtiment au milieu du cheminement on trouve un écart de 6cm. Donc au bout de trois quart d’heure de scan, la dérive du calcul de la trajectoire est de 6cm dans des conditions de levé à l’intérieur et à une vitesse normale.
Si le levé se déroule en extérieur et que l’environnement est plus pauvre, la dérive peut être augmentée. Ce point sera développé dans une prochaine partie.
26
Figure 19 : Ecart sur un angle extérieur de bâtiment entre les mesures du ZEB-REVO et d’une station totale
L’autre limite est la taille du nuage de points. Passé une demi-heure, la taille du fichier se rapproche de 1Go. Le calcul est rallongé, la vidéo prise par la ZEB-CAM est aussi plus lourde.
La solution est donc de réaliser plusieurs boucles, non seulement pour réduire le temps de calcul mais aussi pour éviter la dérive de la centrale inertielle.
Ouverture des portes de placards et des rideaux en amont du levé
Le but de cette opération est d’éviter au ZEB-REVO de prendre des mesures sur des éléments qui ne sont pas utiles au rendu. GeoSLAM demande à ses clients, avant même de commencer à scanner, d’ouvrir tous les objets qui obstruent le passage ou les visées. On va éviter au maximum de prendre des points sur des détails que le dessinateur ne va pas exploiter.
Dans la pratique, le géomètre n’ayant pas forcément le temps de visiter toutes les pièces avant de commencer son travail, cette méthode n’est pas pratique. La décision a été prise de démarrer le scan sans rien toucher. L’ouverture des rideaux pour voir les encadrements de fenêtre ou l’ouverture des portes pour voir le mur au fond du placard se fera pendant le levé. La technique à entreprendre est simple ; avant de relever un objet non souhaité dans le nuage, on se met dos à ce dernier, on ouvre et on se retourne pour réaliser des mesures. Cette manipulation permet de gagner un temps précieux.
27 Si, involontairement, des points sont pris sur les éléments en question, ça n’a aucune importance du moment que cette erreur est réparée. Sur le résultat, on verra peut-être deux traits et le dessinateur ira donc chercher les renseignements qu’il souhaite dans la vidéo prise par la ZEB-CAM.
Figure 20 : Eléments mobiles (bleu) et les éléments à ne pas dessiner (rouge)
Pour ce test, le bureau de Castanet-Tolosan a été levé. Nous allons étudier trois éléments qui ont été déplacés pendant le levé : le rideau, la porte de placard, la porte d’entrée et les portes intérieures. On observe que les portes intérieures étaient ouvertes tout au long du levé mais elles ont été légèrement déplacées. Elles sont bien visibles et le dessinateur comprend ce qu’il dessine. Pour la porte d’entrée, c’est légèrement différent, elle a été ouverte pendant le levé. Elle est représentée par deux traits bien distincts mais moins clairs que les portes intérieures. Pour les rideaux, on observe un trait ondulé avec un léger flou car les points ne sont pas pris sur des éléments durs. Le dessinateur comprend directement que cela correspond à un rideau. Pour les portes coulissantes des placards, leur distinction est plus difficile. Ils peuvent être confondus avec du mobilier comme des étagères qui elles ne doivent pas apparaitre sur un plan d’intérieur. Dans ce cas là, le dessinateur fera appel à la vidéo ou à la personne qui est allée sur le terrain.
Porte d’entrée Rideau devant un placard Porte coulissante d’un placard Porte intérieure Etagère (À ne pas dessiner)
28 Au final, le dessinateur doit être vigilant à la digitalisation et, en cas de doute, doit toujours vérifier son travail.
Changement de pièce ou d’environnement
GeoSLAM recommande aux clients de passer en marche arrière toutes les portes. En effet, pour pouvoir « relier » les pièces entre elles, on a besoin de voir les éléments de surface de la première pièce. Une fois la porte passée, l’utilisateur doit se retourner et continuer à lever. Ainsi pour déterminer la trajectoire du cheminement, le calculateur prendra en compte à la fois les données de la centrale inertielle mais aussi celles des éléments de surface.
En réalité, à l‘intérieur d’un bâtiment, les portes peuvent être passées en avant. Les éléments de la nouvelle pièce peuvent être vus par l’appareil avant de passer la porte. Ces éléments doivent bien sûr se trouver à une distance inférieure à la portée maximale.
Quand le levé oblige de changer d’environnement, en somme de passer de l’intérieur d’un bâtiment vers l’extérieur, il est fortement conseillé de passer la porte en marche arrière. Cette manipulation sert de contrôle permettant d’obtenir un extérieur cohérent avec l’intérieur.
Figure 21 : Sens de levé des différents types de porte
Sens de levé Porte 1
Sens de levé Porte 2
29 Dans le cas de la porte 1 : la porte d’entrée, l’opérateur devra se retourner pour scanner des éléments de surface avant de changer d’environnement. S’il souhaite rentrer, il peut passer simplement la porte en marche avant.
En ce qui concerne la porte 2 : une porte intérieure, les éléments de la nouvelle pièce se trouvent à une distance inférieure à la portée maximale. L’opérateur n’est donc pas obligé de réaliser un demi tour avant de passer la porte.
Méthode de levé dans un couloir
Les couloirs sont des pièces rectilignes et souvent vides. Or pour que l’appareil fonctionne correctement, il faut qu’il puisse reconnaître des formes. Lors des premiers calculs dans les couloirs, le fichier qui caractérise les conditions de calcul indique des difficultés dans ces passages. La première solution envisagée était très simple, il suffit de détecter ces endroits ‘pauvres’ et on y ajoute des éléments de surface avec le placement de chaises ou de cartons ou, si possible, la mesure de seuil de pièce.
Figure 22 : Représentation des conditions de levé dans un même couloir sans élément de surface (haut) et avec éléments de surface (bas)
Cette solution reste limitée car elle ne permet pas de régler sensiblement le problème. On a donc envisagé de parcourir les couloirs en arrière. On peut penser qu’en utilisant cette technique, les éléments de surface restent dans le champ de vision de l’appareil à chaque instant. On peut concevoir que le calculateur éprouvera ainsi moins de difficultés à créer des points.
30
Figure 23 : Résultat du levé d’un couloir en marche arrière
Mais cette technique ne marche pas, la technologie SLAM ne fonctionne pas et renvoie un nuage de points complètement faux et inexploitable. En conclusion, il faut être très précautionneux dans les couloirs et ne pas hésiter à les scanner plusieurs fois.
Geste brusque
Lors d’un levé, il est possible que l’opérateur trébuche ou commette un geste violent. Si on isole les données à cet instant précis, le résultat obtenu est un ensemble de points mal répartis, très espacés et parfois faux. Le fichier nommé ‘cond.ply’, renvoyé par le calculateur de GeoSLAM, nous indique que les points en question ont été difficilement calculés. En effet, certaines données lasers qui ont été émises n’ont pas eu le temps d’être reflétées. De plus, on peut penser que les composants de la centrale inertielle ont mal réagi face à la vitesse instantanée du geste.
La solution est de revenir en arrière pour reprendre des éléments de surface communs levés avant le geste brusque. Le calculateur arrivera à se repérer dans son environnement et la suite du levé ne sera pas entachée de mesures fausses. Le nuage de points obtenu est donc celui recherché.
Figure 24 : Nuage de points d’une salle de classe Figure 25 : Zoom sur les points
31 La majorité des points en rouge provient du mouvement brusque. Ils peuvent être supprimés avant de commencer le dessin mais ils ne sont pas trop gênants car très peu nombreux. De plus, le reste du dessin est resté cohérent il est donc utilisable.
Vérification de la portée
Ce test vise la vérification de la portée dans différentes conditions plutôt qu’une technique spéciale de levé. Les deux environnements étudiés sont l’intérieur d’un bâtiment et son extérieur. Sur la notice, le constructeur indique une portée de 30m dans une pièce fermée, avec une réflectivité des objets de 90%. Le test a été réalisé face à un mur et on obtient les résultats suivants :
Distance au mur (m) Résolution (cm)
5 1
10,5 2,5
21 (maximum) 10
Tableau 3 : Résolution du ZEB-REVO en intérieur
Pour l’extérieur, le constructeur déclare une portée maximale de 15 à 20m pour des conditions favorables (luminosité faible). Le test a été réalisé en marchant à une allure standard, à une distance de 5m devant une façade et on obtient :
Hauteur sur la façade (m) Résolution (cm)
3,5 1
7,5 2,5
11 (maximum) 7
Tableau 4 : Résolution du ZEB-REVO en extérieur
Figure 26 : Seuils de résolution sur la façade d’un immeuble
A l’intérieur, l’opérateur doit respecter une portée d’environ 20m s’il ne peut pas s’approcher de l’objet à lever. Lors d’un levé en extérieur, dans des conditions de levé ensoleillées, l’opérateur ne doit pas se trouver à plus de 11m d’un élément à mesurer. Pour tous les objets à relever qui se situent à une distance proche de la portée maximale, l’utilisateur devra marquer un temps de pause pour permettre au ZEB-REVO de prendre suffisamment de points, donc d’augmenter la résolution afin de bien les modéliser.
32 Différents types de cheminement
Selon l’état du terrain à lever, l’opérateur doit choisir au préalable la trajectoire qu’il prendra pour pouvoir mesurer la totalité de l’environnement. Il existe trois types de cheminements possibles :
- les cheminements en boucle ; - les cheminements linéaires ;
- les cheminements croisés.
Le cheminement en boucle consiste à réaliser le tour de l’ensemble à lever. De manière générale, on commence d’un point, on lève les objets une seule fois en suivant le sens et on revient au point de départ. Cette méthode fonctionne très bien et c’est celle qui permet de minimiser la dérive de la centrale inertielle. On a donc une précision de positionnement très bonne.
Figure 27 : Trajectoire en boucle
Les cheminements linéaires sont donc employés lorsque le géomètre n’a pas le choix, comme par exemple le levé d’un corps de rue. Dans ce cas, là on va démarrer d’un point, longer un côté de la route, faire demi-tour et mesurer l’autre côté pour revenir au point de départ. Mais cette méthode est très souvent entachée d’une dérive de la centrale inertielle même si le temps de levé est court.
33
Figure 28 : Trajectoire linéaire
Il faut éviter au maximum cette méthode ou bien, si l’on n’a pas le choix, réaliser deux petits levés qui seront assemblés, pour minimiser la dérive de la centrale inertielle.
Les cheminements croisés concernent les travaux où deux zones à scanner sont reliées par une seule passerelle ou par un chemin. Si l’on cherche à tout relever l’ensemble en un seul scan, le calcul sera mauvais, c’est-à-dire on aura un problème de dérive suite au passage de cet espace.
34 La solution est, ici aussi, de réaliser deux levés distincts qui auront comme partie commune le passage en question. Ils seront recalés ensemble grâce à cet élément.
2.2
Contrôle
Le contrôle est une pratique obligatoire que doit réaliser le géomètre. Il s’applique à tous types de travaux. On doit donc contrôler tous les levés au GeoSLAM. La technologie n’étant pas infaillible, il faut la vérifier. Le protocole qui a été mis en place est le suivant : il faut prendre la peine de relever une deuxième fois l’environnement au ZEB-REVO, si l’opérateur a le temps. Pour cela et dans le meilleur des cas, la seconde boucle sera parcourue dans le sens inverse à la première et même avec un point de départ différent. Cela permettra de vérifier la cohérence du résultat des deux scans et le dessinateur pourra confirmer, en utilisant les deux scans, si ce qu’il trace est bien conforme. Si l’une des sessions venait à être fausse, la deuxième sert de « roue de secours » et évite à un employé de retourner sur le terrain et donc de perdre un temps précieux. Un autre avantage est le fait que les deux scans soient complémentaires, si le levé d’un élément a été omis dans l’un des scans, il ne le sera sûrement pas d’un autre point de vue. Le deuxième contrôle que l’on peut réaliser, et qui doit être fait à chaque fois que le ZEB-REVO est utilisé, est de prendre des points de contrôle par la méthode traditionnelle. Ce contrôle se fera sur des éléments bien précis comme par exemple des angles de bâtiment (intérieurs ou extérieurs) répartis sur tout le chantier. Ces points mesurés à la station totale permettront de détecter une erreur dans le levé comme par exemple la dérive de la centrale inertielle.
Figure 30 : Superposition du scan sur un levé à la station totale pour la détermination de la dérive
Zone au milieu
Zone de départ Zone de fin
35 Ce levé a été réalisé dans le but de vendre des appartements qui sont en location. Ici, le levé au ZEB-REVO vient en complément du levé topographique, notamment pour les angles de murs qui ne peuvent pas être tous vus de la station totale.
Le but est de vérifier si le nuage de point ne souffre pas d’imprécision. Le plan du nuage de points a été recalé sur les points topographiques grâce au recalage Helmert. Voici les écarts obtenus :
Figure 31 : Zoom sur le début du levé Figure 32 : Zoom sur la fin du levé
On remarque que les angles des bâtiments au début et à la fin du levé se superposent parfaitement entre les deux types de mesure. Le problème se situe plus au milieu du linéaire.
36 Le résultat est de très mauvaise qualité. Entre le levé à la station totale et celui au ZEB-REVO, il y a des écarts de 15cm. Cet écart n’étant pas acceptable, on ne pourra pas utiliser les données du scan. Le contrôle à la station totale a donc permis de discerner le disfonctionnement du scanner. Si ce contrôle n’avait pas été réalisé, le géomètre aurait probablement rendu des plans faux au client.
2.3
Nettoyage du nuage de points
Le nettoyage du nuage est une étape importante du rendu. En effet, il est possible que le nuage soit imparfait, qu’il présente du bruit ou un ensemble de points que l’on ne souhaite pas utiliser pour le dessin. Plusieurs logiciels permettent de réaliser cette opération (Scene de Faro, CloudCompare...). C’est le logiciel ReCap d’Autodesk qui est utilisé. Il permet par sélection de trois points dans le nuage de créer un plan au-dessus ou en-dessous duquel les points vont être supprimés. Ensuite, il suffit de tracer l’emprise sur les points à supprimer. Les données sélectionnées sont ajoutées dans un calque qui peut être rendu invisible. Cela permet de supprimer des objets fixes inutiles au dessin (comme du mobilier) mais aussi tous les points pris sur des éléments mobiles (comme des personnes). C’est une solution facile, rapide et très efficace.
Prenons l’exemple d’un levé en intérieur où l’on souhaite supprimer les points pris sur une chaise. La première étape consiste à sélectionner un plan de référence que l’on peut délimiter à une emprise et en profondeur.
37 Ensuite, on créer l’emprise de la chaise par un polygone.
Figure 35 : Sélection des objets par un polygone d’emprise
Tous les points qui se trouvent dans l’emprise du polygone et au-dessus du sol seront placés dans un calque puis rendu invisible. Le résultat est le suivant :
38 Dans la majorité des cas, les points relevés sur des éléments mobiles n’ont aucune incidence sur le calcul du nuage de points. Mais si l’on se trouve dans une situation d’environnement « pauvre », il est préférable d’éviter ces éléments qui peuvent être utilisés comme des éléments de surfaces et donc inclure des erreurs dans le calcul.
Alors, les résultats obtenus avec l’appareil de GeoSLAM ont un très gros inconvénient. L’ensemble des données se retrouve dans un seul et même nuage qui se trouve être un seul bloc. Au contraire, les nuages des scanners lasers statiques correspondent à une station. Le nettoyage est accompli nuage par nuage. Il est beaucoup plus aisé de visualiser à l’intérieur d’un petit jeu de données que d’un grand.
Nous pouvons prendre l’exemple des données reflétées par la surface d’un miroir. En effet, ce sont des éléments difficiles à repérer et donc à effacer. La direction de la mesure est bonne mais la distance est mesurée sur le mur opposé au miroir. Le point se retrouve donc dans la pièce se situant à l’arrière du miroir. Dans le cas d’un relevé au scanner laser statique, il est aisé d’isoler le nuage correspondant à la station faite devant la surface réfléchissante et ainsi de supprimer les points faux, alors que dans le cas d’un relevé avec le ZEB-REVO, cet isolement est impossible du fait du nuage en un seul bloc. Le risque est alors que les murs « réfléchis » soient confondu avec une autre pièce. Pour éviter ce genre d’interprétation, la solution est de recouvrir les miroirs d’un drap. Sur le terrain, il faut donc passer au préalable dans les pièces pour identifier tous les miroirs. Cette opération est toutefois fastidieuse à entreprendre.
2.4
Mode opératoire
Avant de commencer tout scan avec l’appareil de GeoSLAM, il est impératif de toujours avoir à l’esprit qu’un contrôle avec une technique traditionnelle est obligatoire. On ne peut pas aller sur le terrain avec comme seul appareil le ZEB-REVO. L’utilisateur pourra, s’il a du temps, réaliser au moins une deuxième session.
Après les tests réalisés, un mode opératoire se dégage. Ce mode opératoire préconisé peut être mis en place pour la majorité des missions. Il faut savoir qu’il n’est pas infaillible. Parfois certaines dérives peuvent intervenir mais si les contrôles ont bien été effectués, il n’est pas nécessaire de repartir sur le terrain pour réaliser de nouvelles sessions. De plus, les options proposées par le logiciel Desktop V3 de GeoSLAM permettent de rectifier certains calculs en fonction du type de levé qui a été entrepris.
En récapitulatif, pour un levé bien exécuté, il faut prendre le temps de s’attarder sur les détails ou les éléments à lever. Ensuite, il faut réaliser les plus petites sessions possibles pour limiter la dérive de la centrale inertielle et avoir une bonne précision de localisation dans l’environnement. Les éléments qui gênent la mesure des surfaces à relever ne sont pas obligatoirement déplacés avant de commencer. La tête du scanner doit être dirigée à l’opposé de l’objet déplacé. Il faut aussi se retourner lorsque l’on passe une porte pour aller vers un extérieur ou une grande pièce vide. En effet, pour contrôler les données de la centrale inertielle, le calculateur a besoin également des données des éléments de surface.
Si le géomètre trébuche ou commet un geste brusque avec la tête du ZEB-REVO, il peut marquer un temps de pose et revenir scanner à l’endroit où la vitesse de levé a soudainement augmenté. Le levé