Faculte de genie
Departement de genie mecanique
ETUDE DE LA TRANSMISSIBILITE D'ATTACHES
DE SIMULATEURS DE VOL
Definition de pro jet de maitrise es sciences appliquees
Cyntia DORE
Sherbrooke, Quebec, CANADA
Published Heritage
Branch
395 Wellington Street Ottawa ON K1A0N4 CanadaDirection du
Patrimoine de I'edition
395, rue Wellington Ottawa ON K1A0N4 CanadaYour file Votre reference ISBN: 978-0-494-42952-5 Our file Notre reference ISBN: 978-0-494-42952-5
NOTICE:
The author has granted a
non-exclusive license allowing Library
and Archives Canada to reproduce,
publish, archive, preserve, conserve,
communicate to the public by
telecommunication or on the Internet,
loan, distribute and sell theses
worldwide, for commercial or
non-commercial purposes, in microform,
paper, electronic and/or any other
formats.
AVIS:
L'auteur a accorde une licence non exclusive
permettant a la Bibliotheque et Archives
Canada de reproduire, publier, archiver,
sauvegarder, conserver, transmettre au public
par telecommunication ou par Plntemet, prefer,
distribuer et vendre des theses partout dans
le monde, a des fins commerciales ou autres,
sur support microforme, papier, electronique
et/ou autres formats.
The author retains copyright
ownership and moral rights in
this thesis. Neither the thesis
nor substantial extracts from it
may be printed or otherwise
reproduced without the author's
permission.
L'auteur conserve la propriete du droit d'auteur
et des droits moraux qui protege cette these.
Ni la these ni des extraits substantiels de
celle-ci ne doivent etre imprimes ou autrement
reproduits sans son autorisation.
In compliance with the Canadian
Privacy Act some supporting
forms may have been removed
from this thesis.
Conformement a la loi canadienne
sur la protection de la vie privee,
quelques formulaires secondaires
ont ete enleves de cette these.
While these forms may be included
in the document page count,
their removal does not represent
any loss of content from the
thesis.
Canada
Bien que ces formulaires
aient inclus dans la pagination,
il n'y aura aucun contenu manquant.
Les simulateurs de vols sont tres utilises dans la formation des pilotes de lignes. Ces simulateurs reproduisent les differentes conditions de vol qu'un pilote pourrait avoir a faire face dans une situation reelle. II est done important qu'ils soient tres representatifs de la realite. Le mouvement est simule par Taction de verms entrainant la cabine et creant l'illusion d'etre dans un vrai appareil. Cependant, les verins utilises peuvent produire beaucoup des vibrations et l'utilisation d'isolateurs reliant les verins a la cabine peut devenir necessaire. Le but de cette etude etait d'etablir un modele dynamique permettant l'amelioration et l'optimisation des performances d'isolateurs sur un simulateur de vol afin de minimiser le bruit a l'interieur de l'habitacle.
Pour ce faire, un modele analytique du systeme verins-isolateur-cabine a ete etabli. Ce dernier permet de calculer la position d'equilibre du systeme ainsi que de determiner la transmissibilite en force sur la cabine. Le logiciel ANSYS a permis de valider ce modele. Afin d'optimiser les isolateurs, il est important de s'assurer que les frequences de resonance du systeme ne soient pas dans une gamme de frequence non desiree. Pour ce faire, l'impact de la variation de differentes proprietes du systeme sur la position des frequences de resonance a ete etudie. Par exemple, en diminuant la masse de l'isolateur de 50%, une augmentation allant jusqu'a 25% de la position des frequences de resonances est observee. De plus, un deplacement vers la droite du centre de gravite de l'isolateur de 50% amene les pics de resonances a se deplacer d'environ 45% vers la droite tandis qu'un changement de raideur des composantes elastiques les deplacent de 5% a 60%.
J'aimerais, tout d'abord, remercier sincerement mon directeur de recherche, le Dr De-nis Rancourt, pour le support qu'il m'a apporte, pour les conseils qu'il m'a donnes et pour la confiance qu'il a montree a mon egard.
Je remercie egalement Marc Denninger pour son aide et sa disponibilite pour repondre a mes questions.
Je tiens a remercier aussi Stephane Martel pour son eternel optimisme et son aide pre-cieuse en informatique.
Finalement, je veux exprimer toute ma reconnaissance et ma gratitude aux gens impli-ques dans ce projet malgre eux. A mes parents, Rejeanne et Levis, pour leur presence rassurante et leurs encouragements continuels, a Melissa et Yanick pour leur incondition-nel appui ainsi qu'a mes amis, particulierement Marie-France et Audrey, qui reussissent toujours par leur entrain et leur gaiete a me faire sourire.
1 Introduction 1
2 Revue de litterature 4
2.1 Types de fixations 4 2.2 M o d e r a t i o n 9
2.2.1 Modelisation des fixations 9
3 Modelisation dynamique de l'isolateur 12
3.1 Etude theorique du systeme 12 3.1.1 Calcul de la coenergie cinetique 16
3.1.2 Calcul de l'energie potentielle 18 3.1.3 Equations de Lagrange 26 3.1.4 Equations de Lagrange selon la position d'equilibre du systeme . . 29
3.1.5 Calcul de la transmissibilite 32 3.2 Etude numerique du systeme 33
4 Resultats et analyses 37
4.2 Etude dynamique du systeme 40 4.3 Etude de sensibilite du systeme 47
4.4 Conclusion 60
5 Discussion 61
Conclusion 66
Bibliographie 69
A Annexe 1 : Code MATLAB 70
B Annexe 2 : Code ANSYS 80
C Annexe 3 : Influence de la variation de differents parametres sur la
1.1 Exemple de simulateur de vol 2
2.2 Fixations hydrauliques (a) avec simple orifice, (b) avec membrane inertielle
et decoupleur 6 2.3 Modele mecanique d'une fixation hydraulique 6
2.4 Modele mecanique d'une fixation « fluidlastic » en porte-a-faux 7 2.5 Modele mecanique d'une fixation semi-active. La masse peut etre ajustee
pour changer l'amortissement 8 2.6 Modele mecanique de fixations actives ou F est la force dynamique generee
par un actionneur (a) fixations elastomeres, (b) fixations hydrauliques. . 9
3.1 Systeme a l'etude (cabine-isolateur-verins) 13 3.2 Modele utilise pour le systeme cabine-isolateur-verins 14
3.3 Variables choisies pour les dimensions du modele 15 3.4 Geometrie de la cabine pour le calcul de hi 19 3.5 Geometrie de l'isolateur pour le calcul de /12 19 3.6 Geometrie de l'isolateur pour le calcul de la longueur BC 20
3.8 Difference entre les composantes x (BCX) et y (BCy) par rapport a la
longueur totale du ressort BC 23 3.9 Difference entre les composantes x (PNX) et y {PNy) par rapport a la
longueur totale du ressort PN 24 3.10 Emplacement des noeuds pour le modele sur ANSYS. Le noeud 101 est
fixe dans l'espace 34 3.11 Representation des elements reliant les differents noeuds (pas a l'echelle) 35
3.12 Modele utilise sur le logiciel ANSYS (a l'echelle) 36
4.1 Transmissibilite F\ du systeme nominal 41
4.2 Transmissibilite F2 du systeme nominal 42
4.3 Transmissibilite i*\ lorsque le systeme nominal n'a pas d'amortissement. . 43 4.4 Transmissibilite F2 lorsque le systeme nominal n'a pas d'amortissement. . 44
4.5 Premier mode du systeme nominal sur ANSYS 45 4.6 Deuxieme mode du systeme nominal sur ANSYS 46 4.7 Troisieme mode du systeme nominal sur ANSYS 46 4.8 Transmissibilite F\ pour une diminution de la masse de l'isolateur (modele
analytique) 48 4.9 Transmissibilite F\ pour une augmentation de la masse de l'isolateur
(mo-dele analytique) 49 4.10 Influence de la masse de l'isolateur sur les frequences de resonance de Fi. 50
4.11 Transmissibilite F\ pour un deplacement vers la gauche du centre de
gra-vite de l'isolateur (modele analytique) 51 4.12 Transmissibilite Fi pour un deplacement vers la droite du centre de gravite
4.13 Influence de la position du centre de gravite sur les frequences de resonance
deF
t53
4.14 Transmissibilite F\ pour une diminution de la raideur du ressort BC
(mo-dele analytique) 54 4.15 Transmissibilite F\ pour une augmentation de la raideur du ressort BC
(modele analytique) 55 4.16 Influence de la raideur du ressort BC sur les frequences de resonance de F\. 56
4.17 Transmissibilite F\ pour une diminution de la raideur du ressort PN
(mo-dele analytique) 57 4.18 Transmissibilite F\ pour une augmentation de la raideur du ressort PN
(modele analytique) 58 4.19 Influence de la raideur du ressort PN sur les frequences de resonance de Fx. 59
5.1 Transmissibilite F\ pour differentes positions du centre de gravite de
Piso-lateur (modele analytique) 64 5.2 Zoom sur la gamme de frequence de 200 a 300 Hz de la transmissibilite
Fi pour differentes positions du centre de gravite de Pisolateur (modele
analytique) 65
C.l Transmissibilite F2 pour une diminution de la masse de Pisolateur (modele
analytique) 88 C.2 Transmissibilite F2 pour une augmentation de la masse de Pisolateur
(mo-dele analytique) 89 C.3 Transmissibilite F2 pour un deplacement vers la gauche du centre de
C.4 Transmissibilite F2 pour un emplacement vers la droite du centre de gravite
de l'isolateur (modele analytique) 91 C.5 Transmissibilite F2 pour une diminution de la raideur du ressort BC
(mo-dele analytique) 92 C.6 Transmissibilite F2 pour une augmentation de la raideur du ressort BC
(modele analytique) 93 C.7 Transmissibilite F2 pour une diminution de la raideur du ressort PN
(mo-dele analytique) 94 C.8 Transmissibilite F2 pour une augmentation de la raideur du ressort PN
4.1 Donnees du systeme cabine-isolateur-verins nominal 38 4.2 Resultats trouves pour les valeurs a l'equilibre du systeme n o m i n a l . . . . 39
4.3 Resultats trouves pour les frequences de resonance du systeme nominal . 41
Introduction
Les simulateurs de vols sont tres utilises dans la formation des pilotes de lignes. Ces simulateurs reproduisent les differentes conditions de vol qu'un pilote pourrait avoir a faire face dans une situation reelle. II est done important qu'ils soient tres representa-tifs de la realite. Pour ce faire, six verins hydrauliques ou electriques sont utilises pour entrainer le mouvement de la cabine et ainsi simuler les conditions de vols. Ces verins, groupes en paire, sont fixes a la cabine par l'entremise d'isolateurs et forment ainsi une plate-forme Gough-Stewart. Ces derniers permettent d'absorber et ainsi d'attenuer les vibrations produites par les verins. A la figure 1.1 un simulateur de vol est montre ainsi que l'emplacement de ses principales composantes.
Depuis quelques annees, des actionneurs electromecaniques sont privilegies. Ces action-neurs reduisent de 75% leurs consommations moyennes d'energie comparativement aux actionneurs hydrauliques. De plus, les actionneurs electromecaniques sont meilleurs pour l'environnement etant donne que l'utilisation d'huile hydraulique n'est plus necessaire. Ainsi, ils eliminent les possibilites de fuites d'huiles et d'avoir a disposer de l'huile usee. Ces verins generent toutefois un spectre de vibrations differents des actionneurs hydrau-liques qui traversent les fixations presentement rigides et induisent un bruit sonore a l'interieur de la cabine. Ainsi, une partie des vibrations traversent les fixations et
pro-ISOLATEURS
J ^
CABINE
ACTUATEURS
Figure 1.1: Exemple de simulateur de vol. [www.cae.com]
voquent un bruit sonore inacceptable a l'interieur de la cabine. Si le niveau de bruit devient perceptible, l'ajout de composantes en caoutchouc a la fixation est une alterna-tive qui peut etre envisagee afin de minimiser la transmission des vibrations a la cabine.
Pour des raisons de contraintes cinematiques, des fixations en configuration de porte-a-faux apparaissent plus avantageuses. Ce type d'isolateur presente toutefois une reponse en frequence particuliere qui doit etre analysee afin de s'assurer d'etre compatible avec le spectre frequentiel des verins electromecaniques.
Le but de ce projet de maitrise est d'ameliorer et d'optimiser les performances des iso-lateurs du systeme afin de reduire au maximum le bruit dans la cabine provenant des vibrations des verins.
Le premier objectif de ce projet de maitrise est de developper un modele analytique per-mettant l'analyse de la transmission des vibrations de l'actionneur a la cabine par
l'en-tremise des isolateurs. A l'aide de ce modele, il est possible de determiner les meilleurs caracteristiques geometriques de l'isolateur ainsi que ses proprietes mecaniques les plus performantes afin de minimiser la transmission de vibrations venant des actionneurs.
Le deuxieme objectif consiste a simuler le systeme cabine-isolateur-verins a l'aide du lo-giciel de simulation par ordinateur ANSYS. Cette simulation permet de comparer les re-sultats trouves par le modele analytique avec ceux du modele numerique et de les valider.
Le troisierne objectif vise a verifier l'influence de differentes configurations de l'isolateur sur la performance du systeme et ainsi diminuer la transmission des vibrations des verins a la cabine et minimiser le bruit dans la cabine.
Le chapitre 2 de ce memoire est consacre au survol des differents isolateurs generiques deja utilisees dans le domaine de l'aeronautique. Ensuite, le chapitre 3 (section 3.1) etablit les equations dynamiques analytiques du systeme cabine-isolateur-verins. Pour ce faire, les equations de Lagrange seront utilisees. Grace a ses equations, il est alors possible de trouver la transmissibilite du systeme a l'etude et de determiner les modifications a apporter au modele afin de reduire le bruit dans la cabine. Puis, dans la section 3.2 du meme chapitre, une modelisation numerique simplifiee permettant de valider le modele analytique defini au chapitre precedent est presentee. Enfin, les deux derniers chapitres sont consacres a la presentation des resultats des calculs realises aux chapitres precedents, a la validation du modele analytique et a revaluation des configurations des isolateurs qui minimisent les vibrations transmises a la cabine.
Revue de litterature
2.1 Types de fixations
Plusieurs sources peuvent etre a l'origine du bruit dans un avion ou un simulateur de vol. Parmi elles, il y a les vibrations des moteurs en marche. Ultimement, l'industrie aero-nautique cherche a reduire les forces dynamiques transmises des moteurs a la structure. L'utilisation d'isolateurs pour attacher les actionneurs ou les moteurs a la cabine est un moyen commun d'y arriver. II n'est pas evident, cependant, d'ameliorer ces isolateurs etant donne que leurs designs sont bases sur des fonctions completement opposees. Ces deux fonctions principales sont d'attacher le moteur a l'avion et d'isoler la structure des vibrations provenant des moteurs. En d'autres mots, les fixations doivent etre « fiexibles » pour permettre l'isolation vibratoire et elles doivent etre « raides » pour supporter le moteur et l'empecher de suivre des mouvements excessifs [SWANSON et coll., 1993]. Elles ont sensiblement les memes roles sur un simulateur de vol, sauf qu'ici, le but est de mieux controler les mouvements de la cabine.
Dans la litterature, la plupart des recherches publiees sur les attaches sont dans le do-maine de l'automobile. II est a noter que les differents types d'attaches sont toutefois basees sur les memes principes peu importe leurs domaines d'applications. II en existe
plusieurs sortes et Yu presente en details les grandes categories qui sont enumerees ici [YU et coll., 2001].
Tout d'abord, il y a les fixations en elastomere ou en caoutchouc conventionnelles (« elastomeric mounts »). Elles sont compactes, rentables et necessitent peu d'entretien. Elles sont souvent modelisees par un ressort et un amortisseur dont la raideur dyna-mique varie avec la frequence (voir la figure 2.1 pour le modele mecanique). Cependant, la raideur dynamique est plus grande a hautes frequences et par consequent leur effica-cite est moins bonne dans cette gamme de frequences. Elles offrent done seulement un compromis entre l'isolation vibratoire du moteur (raideur faible) et la deflection statique de ce dernier (raideur importante) [YU et coll., 2001].
Structure Side
yj
c
Engine Side
Figure 2.1: Modele mecanique d'une fixation elastomere. [YU et coll., 2001]
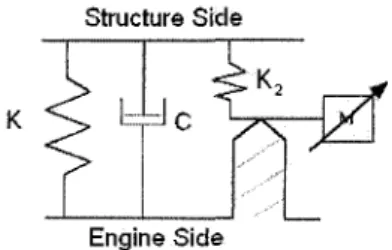
II existe aussi les fixations hydrauliques passives (« passive hydraulic mounts »). Les plus rencontrees sont les fixations hydrauliques (1) avec simple orifice, (2) avec inertie hydrau-lique et (3) avec inertie hydrauhydrau-lique et decoupleur. A la figure 2.2 Failure des fixations (1) et (3) est montree.
L'avantage de ces fixations est d'augmenter grandement 1'attenuation a basses frequences pour une bande de frequences specifiques en creant un amortisseur dynamique. Les deux premiers types fournissent une meilleure performance que les elastomeres particulierement
Rubber Orifice Secondary Rubber Decoupler Decoupler's Gap Orifice
Figure 2.2: Fixations hydrauliques (a) avec simple orifice, (b) avec membrane inertielle et decoupleur. [YU et coll., 2001]
pour la gamme des basses frequences, mais degrade les performances isolantes a hautes frequences [KIM et SINGH, 1995]. L'ajout d'un decoupleur a la fixation hydraulique a regie ce probleme. Ce decoupleur agit comme un piston flottant limitant l'amplitude de deplacement. Ceci permet alors a la fixation d'agir comme une simple fixation elastomere lors de grands deplacements ou comme une fixation hydraulique normale pour fournir l'amortissement necessaire [YU et coll., 2001]. La fixation peut etre modelisee comme le montre la figure 2.3. Ce systeme est excellent lorsqu'il est soumis a des entrees sinuso'i-dales simples. Cependant, les fixations hydrauliques avec decoupleur ne sont pas pratiques lorsqu'ils sont en presence d'entrees superposees etant donne la grande non-linearite du decoupleur [USHIJIMA et coll., 1988].
Structure Side
w
MEngine Side
Figure 2.3: Modele mecanique d'une fixation hydraulique. M represente le fluide se depla-gant par le trajet d'ecoulement et K2 represente l'ajustement volumetrique de la chambre
Lord Corporation a developpe une fixation hydraulique basee sur une nouvelle technologie «Fluidlastic » en configuration porte-a-faux. Cette technologie permet l'utilisation d'une fixation plus souple pour une meilleure isolation vibratoire et un fluide amortisseur pour une reduction du mouvement lors de conditions de resonances. Le niveau d'amortissement et la frequence a laquelle le pic d'amortissement doit se produire peuvent etre specifies. A partir d'un modele theorique et de tests en laboratoire du systeme d'attaches, ils ont etudie le comportement dynamique de ces attaches. Ils ont compare ces attaches avec un systeme de fixations elastomeres. Les resultats montrent une reduction importante de la transmissibilite des forces du moteur a l'avion [RANCOURT et coll., 2003]. Le modele mecanique de ce systeme se trouve a la figure 2.4.
Paddle
Pivoting rod \jf | | ^ KT
Figure 2.4: Modele mecanique d'une fixation « fluidlastic » en porte-a-faux. [RANCOURT et coll. [2003]]
Une technique semi-active peut aussi etre utilisee afin d'augmenter les capacites des fixa-tions hydrauliques. Cette methode permet de controler certains parametres afin d'ajuster la reponse dynamique du systeme. En d'autres termes, le controle semi-actif s'adapte afin de dissiper l'energie de vibration en changeant les proprietes dynamiques (amortissement
U R R
et raideur elastique) des attaches du moteur. II est compose d'une fixation hydraulique passive avec un element et un mecanisme controleur comme le montre le modele de la figure 2.5 [YU et coll., 2001].
Structure Side
Engine Side
Figure 2.5: Modele mecanique d'une fixation semi-active. La masse peut etre ajustee pour changer l'amortissement. [YU et coll., 2001]
Une nouvelle methode mise en place dans l'industrie est l'utilisation d'un controleur ac-tif. Une force dynamique de reaction est creee par un ou plusieurs actionneurs afin de supprimer la transmission de la force perturbatrice (voir le modele de la figure 2.6). Les fixations seront alors tres rigides a basses frequences et s'ajusteront pour etre tres souples a hautes frequences afin d'isoler le systeme des vibrations. Ces fixations fournissent une isolation superieure, mais sont plus lourdes, plus couteuses, consomment plus d'energie et diminueront la fiabilite du systeme [YU et coll., 2001].
Structure Side Structure Side
^
<3)
F K
> Hi W
M Engine Side (a) Engine Side (b)Figure 2.6: Modele mecanique de fixations actives ou F est la force dynamique generee par un actionneur (a) fixations elastomeres, (b) fixations hydrauliques. [YU et coll., 2001]
II est important de mentionner que le design en porte-a-faux des isolateurs a l'etude ne semble pas etre un concept privilegie. En effet, a ma connaissance, il n'existe pas d'article scientifique sur l'etude des performances des fixations en configuration porte-a-faux a l'exception de la fixation fluidlastic developpee par Lord corporation mentionnee precedemment.
2.2 Modelisation
2.2.1 Modelisation des fixations
Malgre la grande diversite des attaches utilisees et developpees, il n'en existe pas de parfaites. Les performances du systeme ne doivent pas dependre uniquement de la per-formance de chacune des fixations mais du design optimal du systeme complet. Tradition-nellement, le design des fixations etait base beaucoup sur Pexperimentation, tres couteuse en temps et en argent. Le degre d'optimisation du systeme fonde sur cette approche etait done tres dependant de l'experience de l'ingenieur, du niveau de flexibilite permis pour modifier le systeme et du temps disponible [ASHRAFUION et NATARAJ, 1992]. Cette situation peut etre amelioree si la configuration utilisee au depart lors des recherches est proche de celle optimale [YU et coll., 2001]. Pour ce faire, la modelisation du systeme
doit comprendre trois composantes, le moteur, les fixations et la cabine. Les fixations sont modelisees comme un ressort avec un coefficient de raideur et un amortissement visqueux dans chacune des trois directions principales [ASHRAFUION, 1993; ASHRAFUION et NATARAJ, 1992; SWANSON et coll., 1993; YU et coll., 2001].
Difierentes techniques d'optimisation ont ete considerees dans la litterature. Une de celles-ci tentait de reduire les forces transmises du moteur au fuselage en eloignant la frequence naturelle du systeme d'une gamme de frequence non desiree [SPIEKERMANN et coll., 1985]. En effet, quand une frequence d'excitation est proche d'une frequence naturelle du systeme, le deplacement du corps rigide et par consequent la force transmise a travers les attaches sont importants. Cette technique est bonne pour deplacer la frequence naturelle mais n'entraine pas necessairement une reduction des forces transmises aux fixations ont replique Swanson et coll. [SWANSON et coll., 1993]. Ces derniers observent plutot que la transmission des forces doit etre directement minirnisee afin de determiner un vrai design optimal des fixations. Les differents parametres a observer lors de la conception d'une attache de moteur sont le type de fixations, la selection des coefficients de rai-deur, l'emplacement et l'orientation de chacune de ces fixations [ASHRAFUION, 1993; ASHRAFUION et NATARAJ, 1992; SWANSON et coll., 1993; YU et coll., 2001].
Les recherches presentement effectuees sur l'optimisation des fixations montrent quelques limitations. Une grande majorite des travaux realises considerent seulement l'optimisation d'un systeme de fixations elastomeres. Ces attaches sont modelisees comme des ressorts et des amortissements lineaires. La possibility de la non-linearite des fixations elastomeres, les caracteristiques complexes des attaches hydrauliques (frequence non-lineaire,...) ne sont done pas considerees. Or, Kim et coll. indiquent que les fixations offrent generalement des caracteristiques dynamiques non-lineaires [KIM et SINGH, 1995]. Aussi, Rivin expose qu'il existe une grande variation dans la raideur des fixations et dans la position du centre
de gravite et dans les moments d'inertie des composantes. Ces variations affectent les resultats d'optimisation du systeme actionneurs-fixation et entrainent alors differentes limitations lors de leur usage [RIVIN, 1985].
Modelisation dynamique de
Pisolateur
3.1 E t u d e theorique du systeme
Afin d'etudier le bruit dans la cabine, il est important d'evaluer la transmissibilite des forces produites par des verins en marche jusqu'a la cabine. Les isolateurs doivent etre optimises afin de reduire au maximum les reactions a la cabine et ainsi diminuer le niveau sonore a l'interieur de l'habitacle. Dans ce chapitre, une methode de calcul est expliquee. Cette derniere permet de comprendre le comportement dynamique du systeme verins-isolateur-cabine et ainsi trouver les equations dynamiques correspondantes. Grace a ces equations, il est possible de determiner la transmissibilite en force du systeme a l'etude.
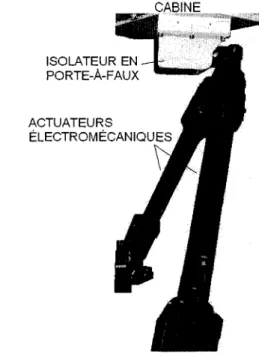
Avant de proceder avec les calculs, il est important de definir le systeme a l'etude. Ce der-nier est montre a la figure 3.1. Afin de simplifier le modele, un seul isolateur du systeme reliee a deux verins et a la cabine est considered. L'analyse est faite de fagon planaire. Le plan choisi est celui ou l'effet de porte-a-faux de l'isolateur agit. De plus, ceci facilite l'analyse de la structure car il est plus facile d'etudier un modele planaire qu'un modele en trois dimensions. II est egalement possible de supposer que c'est dans ce plan que les
mouvements et done les efforts seront les plus grands. En effet, les verins ne se deplagant qu'axialement amenent alors l'isolateur a tourner dans le plan choisi. Ainsi, ce dernier supporte d'importantes charges dues a sa conception. Le modele choisi est represente a la figure 3.2. Bien que le systeme reel soit en trois dimensions, l'approche en deux dimen-sions a ete privilegiee etant donne qu'elle ne neglige pas le phenomene de porte-a-faux du systeme tout en etant plus simple a analyser.
CABINE
ISOLATEUR EN PORTE-A-FAUX
ACTUATEURS
ELECTROMECANIQUES
Figure 3.1: Systeme a l'etude (cabine-isolateur-verins).
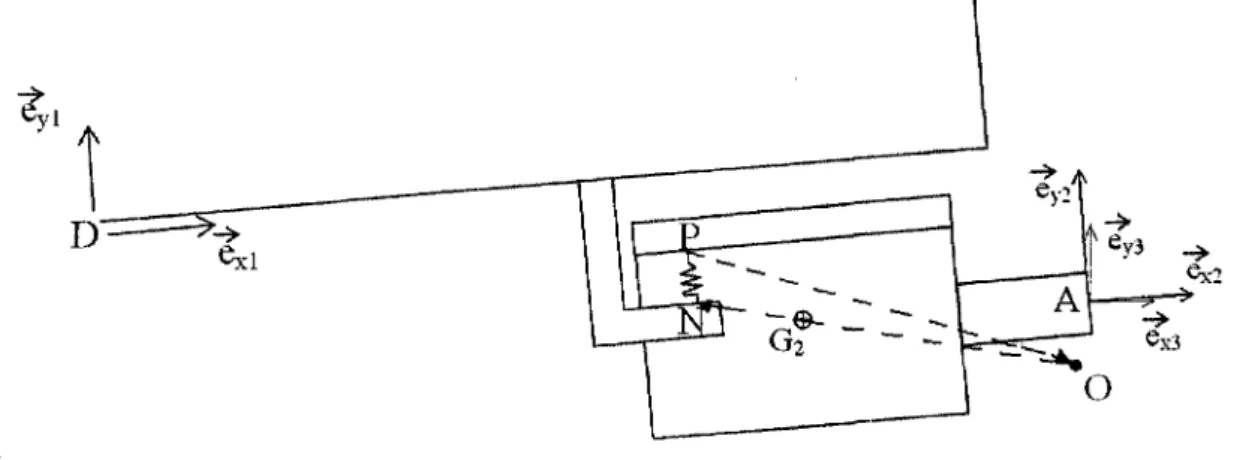
Comme le montre la figure 3.2, la cabine est definie par la masse mi. Afin de tenir compte des autres verins presents dans le systeme, un ressort et un amortisseur en rotation (fej et C4) ont ete ajoutes au point de rotation de la cabine. L'isolateur est simulee par la masse rn2 et par les ressorts lineaires ki et k2- J\ et J2 sont les moments d'inertie de la cabine
et de l'isolateur par rapport a leurs centres de gravite respectif. Finalement, la masse m3, le ressort £3 et l'amortisseur C3 representent l'impedance mecanique apparente des
6yl
n
K4, C4J>
)
Gl exi G2 lifeh
1
ye mi Ji G J k i2
0,A ey2 ey3. ea e*3 1113te
S - L J C3 x \ x v^\ Figure 3.2: Modele utilise pour le systeme cabine-isolateur-verins.verins. Les coordonnees generalises decrivant le mouvement complet du systeme sont #i, la rotation de la cabine, #2, la rotation de l'isolateur, et 2/3, le deplacement vertical des verins. Les points B et P sont sur l'isolateur et bougent avec ce dernier tandis que les points C, D et N sont fixes sur la cabine. Le point O est fixe dans l'espace et le point A, fixe sur l'isolateur, se deplace verticalement uniquement.
II est important de remarquer ici que les systemes d'axes 1 (exi - eyi) et 2 (eX2 - eV2) sont
fixes sur la cabine et sur l'isolateur respectivement et que le systeme d'axe 3 (eX3 - ey3)
1 et 2 dans le repere 3 est (ou i = 1, 2) :
eXi = (cos 9igX3 + sin #*& V3)
£yi = (~ s i n Oitxa + cos 9ieVi)
Les variables choisies pour les dimensions du systeme sont presentees a la figure 3.3. Le sens des fleches est important.
r^-TG,D
H
m- <-->, i i ic _Bi I G , I A G2 "AD «x3 l ^ -'AD
Figure 3.3: Variables choisies pour les dimensions du modele.
Pour comprendre le comportement dynamique du systeme, une modelisation par les equa-tions de Lagrange est utilisee. Ces equaequa-tions se definissent comme suit :
_d dL _ dL, _
ou: L = T* -V
= Lagrangien (coenergie cinetique moins energie potentielle
du systeme).
qi = coordonnees generalisees. Fqi = forces generalisees.
3.1.1 Calcul de la coenergie cinetique
Les verins, la cabine ainsi que l'isolateur contribuent a la coenergie cinetique du systeme. Cette derniere est donnee par :
T* = \m,yl + \{Ji + m ! ( 4
l D+ y
2GlD))B\ + \j
2B\ + \m
2G\ (3.2)
ou : mi, m2 et m3 = masses de la cabine, de l'isolateur et des verins
respectivement.
?/3 = vitesse d u centre de gravite d e s verins selon eya.
Ji,J2 = moments d'inerties de la cabine et de la isolateur
par rapport a leurs centres de masse respectivement.
%GiD, 1/GiD — distances en x et en y du centre de gravite de la cabine [G\)
jusqu'au point D selon eXl et eyi (voir figure 3.3).
&i et 92 = vitesses angulaires de la cabine et
de l'isolateur dans les reperes 1 et 2 respectivement.
G2 = vitesse du centre de gravite de l'isolateur selon eX2 et eV2.
Dans cette equation, seule G2 est a redefinir en fonction des coordonnees generalisees
la distance du point fixe O jusqu'au centre de gravite de l'isolateur (selon la figure 3.2)). En se referant toujours a cette figure, il est facile de trouver l'equation correspondant au deplacement de OG2 :
OG2 = OA + AG2 = y3eV3 + (xAG2eX2 + VAG2ey2)
ou XAG2 e^ UAG2 = distances en x et en y du point A jusqu'au centre de
gravite de l'isolateur dans le repere 2.
Apres conversion dans le repere 3, l'equation pour le deplacement en y de l'isolateur se resume a :
OG2 = (XAG2 cos 02 - VAG2 sin 92)eX3 + (y3 + XAG2 sin 62 + VAG2 cos 62)e,:
Le deplacement OG2 est maintenant en fonction des coordonnees generalisees. II est
pos-sible alors de deriver cette equation pour retrouver :
; >
OG2 = (-XAG202 sin02 - VAG2&2 COS92)eX3 + (y3 + XAQ262 cos02 - yAG20\ sin92)ey3
Dans l'equation cinetique (eq. 3.2), la vitesse calculee est elevee au carre. Son module est done necessaire. II est :
IOG2I2 = x2AG$ + y2AGJl +yl + 2xAG2y302cos92 - 1yAG2yAsin92
(en consider ant la relation cos2 02 + sin2 92 = 1)
T* = \{m2 + m3)yj + \jtfl + \J2Q\ + \mx{x%xD + y2GlD)e21 +
+\m2x2AG2Bl + \m2y\G^l + m2y3B2{xAG2 cos92 - yAG2 sin(92) (3-3)
3.1.2 Calcul de l'energie potentielle
Apres avoir calcule la coenergie cinetique du systeme, le calcul de l'energie potentielle est necessaire, comme l'indique les equations de Lagrange (eq. 3.1). L'equation generale de l'energie potentielle du systeme est :
V = rrnghi + m2gh2 + m3gy3 + ~hAy2 + -k2Ay\ + -k3yj + -k46f (3.4)
ou g = acceleration gravitationnelle.
rriighi, m2gh2, m3gy3 = energies potentielles gravitationnelles de la cabine,
de l'isolateur et des verins respectivement.
\k\Ay\, \k2Ay^, \k3y2, \k\Q\ — energies potentielles elastiques des ressorts.
Les valeurs hi, h2, Ay\ et Ay2 seront definies par geometrie etant donne qu'elles sont les
seules a ne pas etre en fonction des coordonnees generalises. Tout d'abord, a l'aide des figures 3.4 et 3.5, h\ et h2 peuvent etre e values.
y cos e.
' D G . 1
Figure 3.4: Geometrie de la cabine pour le calcul de h\.
XAG2 S m u2X
' A G
-Figure 3.5: Geometrie de l'isolateur pour le calcul de h2.
hi et h2 valent done :
hi = xDGl sin ex + yDGl cos 6X - yDGl
h2 = xAG2 sin 02 + yAG2 COS 82 + ys- VAG2 (3.5)
Ensuite, Ayi et Ay2, correspondant respectivement a 1'elongation ou a la compression
des ressorts BC et NP a partir de la longueur au repos, sont calcules (voir figure 3.2). Considerons pour commencer le ressort BC. A l'aide de la figure 3.6 (ou le point 0 est
un point dans l'espace fixe a la position A lorsque le systeme est horizontale), le vecteur
W egale W + U8.
evi
Figure 3.6: Geometrie de l'isolateur pour le calcul de la longueur BC.
BO se calcule de cette fagon :
BO = -OB = -(lABeX2+hABey2+y3ey3)
= {-IABCOS92 + hABsin62)eX3 + (-lABsin92 - hABcos62 - y3)ey3
ou lAB = Distance du point A au point B selon eX2, hAB = Distance du point A au point B selon eV2.
De la meme maniere, le vecteur OC equivaut a OD + DC. Done :
OC = (lADeX3 + hADeya) + (lDcexl)
Apres avoir converti l'equation du repere 1 dans le repere 3, OC devient
ou I AD = Distance du point A au point D selon eX3.
HAD = Distance du point A au point D selon ey3.
IDC = Distance du point D au point C selon exi.
Finalement, le vecteur BC est calcule et donne :
BC = (-lAB cos 62 + hABsm02 + lAD + he cos 9i)eX3 +
+ (-UB sin 02 - hAB cos 02 - y3 + hAD + lDC sin 0i)e„3 (3.6)
Pour determiner Ay!, il suffit maintenant de soustraire a BC sa longueur initiale (LQI).
AVl
= BC-h
01 (3.7)L'elongation ou la compression du ressort PN s'evalue de la meme facon que le ressort
BC. A l'aide de la figure 3.7 (ou le point O est un point dans l'espace fixe a la position
A lorsque le systeme est horizontale), le vecteur PN egale PO + ON.
Figure 3.7: Geometrie de l'isolateur pour le calcul de la longueur PN.
PO = -OP = -(lApeX2 + hAPey2+y3ey3)
= {-lApcos92 + hAPsin92)eX3 + (—lAPsin92 — hAPcos92 - yz)ey3
ou lAp = Distance du point A au point P selon eX2.
hAp = Distance du point A au point P selon ey2.
De la meme maniere, le vecteur ON equivaut a OD + DN. Done :
ON = (IAD$X3 + hADey3) + (IDN^X! + hDNeyi)
Apres avoir converti l'equation du repere 1 au repere 3, ON devient :
ON = (lAD + lDN cos Q\ - hDN sin 6\)eX3 + (hAD + lDN sin 9X + hDN cos 6{)e.
ou IDN = Distance du point D au point N selon exi.
hoN — Distance du point D au point N selon eyi.
V3
Finalement, le vecteur PN est calcule et donne :
PN —- (—IAP COS 92 + hAP sin 92 + lAD + IDN COS 0X - hDN sin 9\) eX3+
+(-lAp sin92 - hAP cos 92-y3 + hAD + lDN sin 6>x + hDN cos 9i)ey3 (3.8)
Pour determiner Ay2, il suffit maintenant de soustraire a PN sa longueur initiale (L02).
II faut faire attention ici, etant donne que le vecteur calcule est PN et non NP, Ay2 est
done :
Afin de simplifier les termes Ayi et Ay2,1'approximation des petits angles est utilisee. Par
cette hypothese, il est possible de demontrer que les composantes en x des vecteurs BC et
PN sont negligeables comparativement a celles en y. En effet, si la cabine (9\) et les verins
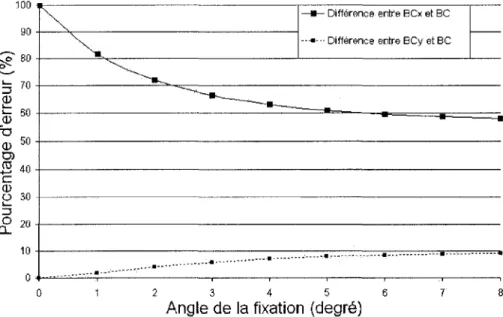
(2/3) ne bougent pas et que seule Pisolateur peut tourner (62), le pourcentage d'erreur entre la composante en x ou en y et la longueur totale du ressort (BC ou PN) est montre aux figures 3.8 et 3.9. Dans ce calcul, la longueur totale du ressort est considered comme la longueur etiree ou compressee selon le cas. II est decide qu'un angle de l'isolateur jusqu'a 8° est valide pour l'hypothese des petits angles. Aussi, cette etude est la plus critique etant donne que la rotation de l'isolateur est la plus importante lorsque la cabine et les verins sont fixes.
100 90
i"
80 =; 70 SO 50 Q> T 3 <D CO B 40 c CD O 30 CL 20 10 \X
—m— Difference entre BCx et BC—•— Difference entre BCy et BC
^ ~ — — * ^ - ^ _ _
• , _ m
0 1 2 3 4 5 6 7 8
Angle de la fixation (degr6)
Figure 3.8: Difference entre les composantes x (BCX) et y (BCy) par rapport a la longueur
100 90 (L> 70 <U 60 T3 PI 50 CO •E 40 a> a 30 o a . 20 m
X
• Difference entre PNx et PN --•--• Difference entre PNy et PN\ f ^ l ' __ -•*'""" \
V.
0.2 0.4 0.6 0.8 1Angle de la fixation (degre)
1.2 1.4
Figure 3.9: Difference entre les composantes x (PNX) et y (PNy) par rapport a la longueur
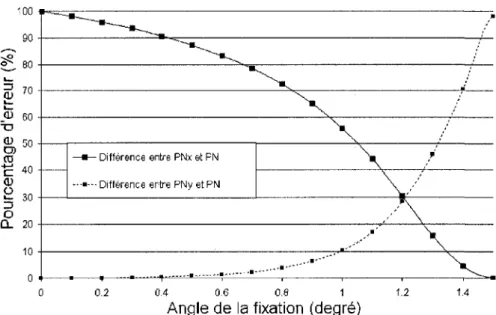
La composante en x du ressort BC a un pourcentage d'erreur d'au moins 60% tandis que la composante en y n'a au maximum que 10% d'ecart avec la longueur totale du ressort. Comme l'isolateur pivote en realite beaucoup moins que 8°, il est possible de conclure que seule l'utilisation de la composante en y comme longueur totale du ressort est possible. Dans le cas du ressort PN, a partir de 1,5° environ, l'isolateur entre en contact avec la cabine. C'est pourquoi a partir de 1° la composante en x devient de plus en plus importante (voir figure 3.9) jusqu'a ce que la composante en y soit inexistante a 1,5°. C'est la raison pour laquelle une plus grande erreur de PNy sur la longueur totale
est calculee compare a PNX a partir de 1,2°. Comme le systeme est congu de fagon a ce
que le contact entre la cabine et l'isolateur ne se produise pas, l'hypothese de considerer la composante en y comme la longueur totale du ressort peut done etre retenue. En effet, avant cet angle, PNy a moins de 10% d'erreur sur la longueur reelle du ressort.
Les valeurs Aj/i et Ay2 (eqs. 3.6 a 3.9) se resument alors a l'equation 3.10 (apres
simpli-fication, sachant que (—hAB + HAD — An) et (—HAP + hAD — hoN + L02) valent 0).
A y i = (-IAB02 - 2/3 + lDcQi)ey3
A ^ = (-lAp02 - V3 + lDN0i)eV3 (3.10)
L'equation potentielle generale (eq. 3.4) devient, sachant hi et h2 (eq. 3.5) et Aj/i et Ay2
(eq. 3.10) :
V = m1g(xDGl sin 91 + yDGl cos 9X - yDGl) + m2g{xAG2 sin<92 + yAa2 cos 92 + y3 - yAG2)
+m3gy3 + \kl{-lAB92 -y3 + lDC0i? + \k2{-lAPe2 - y3 + IDNOI? + \hyl + \kA9\
3 . 1 . 3 E q u a t i o n s d e L a g r a n g e
Maintenant, l'energie potentielle (eq. 3.11) ainsi que la coenergie cinetique (eq. 3.3) ont ete calculees. II est done possible d'evaluer le Lagrangien defini par L = T* — V (voir equation 3.1) avec l'hypothese de 1'approximation des petits angles. C'est-a-dire :
L = | ( m2 + m3)y32 + | J1^ + | J2^ + i m1( 4l Z ) + ^ i 0 ) ^ + i m2x ^G 2^+
+\m2y2AGA + m2i)zQ2{xAG2 - yAG292) - vaxgxDGl9^ - m2g(xAG292 + y3)
-m3gy3 - \h{-lAB92 - y3 + IDC^I)2 - \h{-lApd2 - 2/3 + IDNOI)2
-\hyl-\ktf\
Toujours selon l'equation 3.1, la derivation du Lagrangien peut etre realise. Debutons par la premiere partie de l'equation correspondant a ^ | ^ pour les trois coordonnees genera-lises choisies. Ceci donne :
pour ?/3
-jt f -QT- J = (m2 + m3)y3 + m202xAG2 - m292yAG292 - m292 yAG2 (3.12)
pour #i
d_fdL_
dt\de\
pour 92
(H)
= Jl
^
+ mi(
^
D +
Ve^'
1
(
3
-
13
)
di\W) = j 2^2 + m 2 X^2^ 2 + m2^2yiG 2+m2y3^AG2-"i2y3y/iG2^2-^2yAG2^2y3 (3.14)
La suite de l'equation de Lagrange, — | p , est effectuee egalement pour chacune des coor-donnees generalisees.
Pour la coordonnee generalised y3 :
~Ws = -(~(m2 + m3)g-h(-iABe2-y3 + iDCe1)(-i)
-k2(-y3 - IAP&2 + IDN9X){-1) - k3y3j
et done : ~Wz = (mi + m3)9 + y3(ki + k2 + k3) + 9x(-kxlDc-k2lDN) + 92(kxlAB + k2lAp) (3.15) Pour 9X : ~%l = ~ ( ~ ml9XDGl ~ h{-lAB92 ~ 2/3 + IDCQ\)(IDC) -k2(-lAP92 ~V3 + IDNO\){IDN) - M i J et done :
'Ml = mi9XDGi +y3(-k1lDC - k2lDN) + 9i{kil2DC + k2l2DN + k4)+
+92(—kxlABlDC — k2lAplDN) (3.16) Pour 02 : 8L 'd02 - ( - m2yAG2y392 ~ kx{-lAB92 - 2/3 + IDCOI)(-IAB) -m2gxAG2 - k2(-lAP92 - y3 + IDN9X){-1AP)J et done, ~W2 = m29XAG2 + m2yAG2y302 + y3(kxlAB + k2lAP)+ +61{-k1lABlDC - k2lAPlDN) + 92{kxl\B + k2l\P) (3.17)
En rassemblant les equations 3.12 a 3.17, trois equations dynamiques representant le sys-teme cabine-isolateur-verins sont trouvees. Elles sont :
selon y3
(m2 + m3)y3 + rn292xAG2 + (m2 + m3)g + y3(kx + k2 + k3)+
(3.18)
selon #i
Jrfx + rnj^o + yGlD)0\ + ,mxgxDGl + y3(-hhc - M r w ) +
0i(hlDG + k2l2DN + h) + 02(-kilABlDC - k2lAphN) = -C4<?i
selon #2
J202 + m2a;^G2^2 + m202y2AG2 + m2y\xAG2 + m2gxAG2 + y3(hlAB + M A P ) +
+91(-k1lABlDC - k2lAPlDN) + 62(hl2AB + k2l\P) = 0
(3.19)
(3.20)
II est a remarquer ici que des forces non-conservatrices sont presentes dans le systeme et correspondent a la force d'entree Fin, a ramortissement des verins C31/3 et a
l'amortisse-ment, C461, ajoute pour tenir compte de la presence des autres verins lorsque la cabine tourne. La representation d'etat des trois equations dynamiques (eqs. 3.18 a 3.20) donne ceci : m2 + m3 0 0 0 0 1 0 0 0 0 ( j i + mx(x2GlD + y^l Z ))) 0 1 0 XAG, 0 0 • 0 0 0 0 0 m2xAG2 0 0 0 0 0 0 0 0 (j2 + m2(x2AG2 + y2AGa)) 0 2/3 2/3
h
- c3 (~h -k2- k3) 0 (hlDG + k2lDN) 0 ( - M A S - k2lAP) 1 0 0 0 0 0 0 (hiDc + k2lDN) - c4 (-hl2DC - k2l2DN - h) 0 (hlABlDc + k2lAPlDN) 0 0 1 0 0 0 0 (-hlAB - k2iAP) 0 (hlABlDG + k2lAPlDN) 0 (-hl2AB - k2iAP) 0 0 0 0 1 0 2/3 2/3 02 021 0 0 0 0 0 F in \ -(m2 + m3)g 0 -mxgxDGl 0 -m2gxAG2 0 (3.21)
3.1.4 Equations de Lagrange selon la position d'equilibre du
systeme
Pour avoir un systeme d'equations d'etat, le systeme matricielle (eq. 3.21) doit etre de la forme x = Ax + Bu ou x est le vecteur d'etat et u est le vecteur d'entree. Cependant, ici, une matrice supplementaire est presente dans les termes de droite. En effet, le modele du systeme cabine-isolateur-verins a ete analyse a la position ou les ressorts ne sont pas comprimes et non par rapport au point d'equilibre du systeme. II est facile, par contre, de modifier le systeme pour l'evaluer selon cette position. II est possible de poser les equivalences suivantes :
Qi = 6ieq + &i &i = &i &i = &i
ya = yseg + y'
3m = j/3 j/3 = y'
3(3.22)
ou yzeq = Displacement vertical des verins pour amener le systeme a sa position d'equilibre.
9ieq = Rotation de l'isolateur ou de la cabine (selon le cas) pour amener
le systeme a sa position d'equilibre.
m2 + m3 0 0 0 0 1 0 0 0 0 ( j i + m i O ^ x D + ^ o ) ) 0 0 m2xAG.2 0 0 0 0 0 0 0 m2xAG2 0 0 0 0 0 0 0
0 {j2 + m
2{x
2AG2+y\
GS) 0
2/3 0i 02 07 - c3 (~h - k2 - k3) 1 0 0 (hi DC + hlDN) 0 0 0 (~hlAB ~ hUp) 0 00 (hiDC + M r w ) 0 (-hUB - hlAp) 2/3
0 0 0 0 y'3
- c4 (-hlDc - hlDN ~ h) 0 (hlABloc + hUplDN) 0I
1 0 0 0 ^i
0 (-hlABhc + hUplDN) 0 (-hl2AB - hl2Ap) 02
o
o
i
o #;
+
1 0 0 0 0 0 Fin I+
( - (m2 + m3)g - y3eq(h + k2 + k3) - Qieq{-kilDC - k2lDN) - 02eq(hUB + k2lAp)j
0
( - mxgxDGl - yzeq{-hhc - k2lDN) - 9leq(hlDC + k2l2DN + h)-— &2eq{h)-—k\lABlDC ~ ^AP^Djv)
( - m2gxAG2 - yzeq{kilAB + k2lAP) - 9leq(-kxlABlDC - k2lAPlDN) - 92eq(k1lAB + k2l2AP)j
0
(3.23)
II est facile de voir que la derniere matrice est en fonction des coordonnees generalisees a l'equilibre et qu'elle est nulle. En effet, elle represente la somme des forces et des moments au point d'equilibre. Ceci permets alors d'evaluer les valeurs de y3eq, 9\eq et
02eq. Finalement, la representation d'etat du systeme est :
m2 + m3 0 0 0 m2xAG2 0 0 1 0 0 0 0
(A
+ mi(:
0 0 r2 0 0 0+
yhi » ) ) 0 0 0 1 0 0 ( j2 m2xAG2 0 0 0+ rn
2{x\
G2+ y\
G2yj
0 0 0 0 0 0 1 2/3 2/3 01 0i 02 02-c
3(~h ~k
2- k
3) 0 (hi
DC+ k
2l
DN) 0 (~hl
AB- k
2l
AP)
1
0 0 0 0 0
0 (hiDC + hlDN) -CA (-hl2DC - k2lDN - k4) 0 (hUBhc + k2lAplDN)
0 0 1 0 0 0
0 (-hl
AB- k
2l
AP) o (hl
ABl
DC+ k
2l
APl
DN) o (-hi
2AB- k2l
2AP)
0 0 0 0
1
0
2/3 2/3 0i 0'i 02 0'2+
1 0 0 0 0 0 F (3.24)3.1.5 Calcul de la transmissibilite
Dans la section precedente, les equations dynamiques ont ete trouvees (eq. 3.24). Ces equations ont la forme Mx = Ax + Bu. La matrice M est la matrice de masse du systeme. Apres elimination de la matrice M a l'aide de sa matrice inverse, la forme desiree est trouvee. II sufflt maintenant de trouver Pequation correspondante a y = Cx + Du pour avoir un systeme d'equations d'etat. Ici, y est la sortie recherchee pour differentes entrees
u. Dans le cas present, les forces ressenties sur la cabine au point de contact des ressorts BC et PN sont les sorties cherchees. Avec ces forces, la transmissibilite du systeme sera
calculee. La transmissibilite est le rapport de l'amplitude de la force transmise a la cabine (Fi et F2) sur l'amplitude de la force d'excitation (force des verins, Fin). Fi et F2 doivent
etre defmies en fonction des coordonnees generalisees. Done :
F i = -&1A1/1
Avec les equations 3.10, JF\ et F2 deviennent : F, 0 -fci 0 hlDC 0 -U-ILAB 2/3 y'3 02 8>2
+
0
F2 = -k2 0 k2lDN 0 —k2lAp 2/3 2/3 o u jFi F2= force sur la cabine au point d'attache du ressort BC force sur la cabine au point d'attache du ressort PN
(3.25)
(3.26)
A l'aide de MATLAB (voir le programme a 1'annexe A), il est alors facile de trouver la transmissibilite aux ressorts BC et PN pour le systeme actuel. II est possible par la suite de modifier les proprietes des composantes (masse, raideur des ressorts, position du centre de masse, ...) puisque la demarche mathematique expliquee ici est realisee de fagon symbolique.
3.2 Etude numerique du systeme
Pour verifier les calculs theoriques du systeme verins-isolateur-cabine realises precedem-ment, une etude numerique est effectuee. Cette analyse est accomplie a l'aide du logiciel
Avec le logiciel ANSYS, le comportement statique et dynamique du systeme verins-isolateur-cabine est etudie. L'analyse statique determine les valeurs a l'equilibre (9ieq, 02eq
et yteq) du modele et l'etude dynamique permet de trouver les frequences de resonances ainsi que les modes du systeme.
Tout d'abord, le modele est fait de noeuds choisis a des endroits strategiques correspon-dant a la position des centres de masse des composantes et a l'emplacement des jonctions des elements mobiles. La figure 3.10 reprend le modele choisi a la section precedente et indique l'emplacement des noeuds (chiffres 1 a 9 et 101).
Figure 3.10: Emplacement des noeuds pour le modele sur ANSYS. Le noeud 101 est fixe dans l'espace.
Ensuite, les noeuds sont relies entre eux par des elements (barres, ressorts lineaires ou de torsion selon le cas) de fagon a distinguer chaque composante. La figure 3.11 montre les liens reliant chacun des noeuds precedemment numerates.
.5 " 1 I _ _i I I
Figure 3.11: Representation des elements reliant les differents noeuds (pas a l'echelle)
Des ressorts lineaires sont choisis pour unir les noeuds 3 et 8, les noeuds 4 et 7 et les noeuds 5 et 9. C'est un ressort en torsion qui lie le noeud 1 au noeud 101. Les autres liens sont tous des corps rigides (barres). Le modele ANSYS est montre a la figure 3.12.
Apres le maillage termine, il est important d'imposer les conditions aux limites. C'est ici que le noeud 101 est fixe dans l'espace. Ainsi, le ressort en torsion choisi agira autour du noeud 101. Le deplacement du noeud 1 est contraint dans toutes les directions tandis que son mouvement en rotation n'est pas contraint en z. Le noeud 5 ne peut se deplacer en x. Le noeud 9 est fixe en x et en y, cependant les rotations autour du noeud sont permises.
'9
Figure 3.12: Modele utilise sur le logiciel ANSYS (a l'echelle).
Le programme modelisant le systeme et defmissant ses proprietes se retrouve a Tannexe
B.
Resultats et analyses
Ce chapitre presente les resultats decoulant de l'analyse theorique et numerique realisees au chapitre 3. Tout d'abord, lorsque le systeme est au repos (a l'equilibre), les coordon-nees generalisees 0\, 62 et y^ ne sont pas nulles du aux poids des composantes du systeme.
A l'aide des sections 3.1 et 3.2, leurs valeurs respectives a l'equilibre ont ete determinees. Ensuite, l'etude de la transmissibilite d'un isolateur de configuration nominale est effec-tuee. Ceci permet d'observer les frequences de resonances du systeme nominal. Puis, en calculant et comparant la transmissibilite de deux facons differentes (analytique et nu-merique), il est possible de valider la methode analytique. Enfm, la sensibilite du systeme est etudiee pour certaines modifications apportees au systeme.
Les prochains resultats ont ete calcules avec les donnees listees au tableau 4.1. II est im-portant de mentionner que les donnees fournies ici sont fictives et ne correspondent done pas a un concept existant. Egalement, il est important de savoir que la transmissibilite calculee au point d'attache du ressort BC est definie par F\ et celle calculee au point d'attache du ressort PN est definie par F2.
T A B . 4.1: Donnees du systeme cabine-isolateur-verins nominal Variables mi m2 m3 kx k2
h
&4 = J l J2 C3 C4 LQ\ = LQ2 ~ XGxD VdD Valeurs 4000 400 300 = 62.0e6 = 62.0e6 = 30.0e6 = 30.0e6 = 3000.0 12.0 50000 50000 = 0.0127 = 0.0127 = -2.0000 = -1.0000 kg kg kg N / m N/m N / m Nm/rad kgm2 kgm2 Nsec/m Nmsec/rad m m m m Variables XAG2 VAG2 IAN h-AN IAP tiAP = HAN + LQ2 = I AD -h>ADIDN = —I AD + IAN = hoN =
IAB =
flAB = hAD — LQI = IDC = —IAD + IAB =
9 Valeurs = -0.3200 = 0.0800 = -0.4800 = 0.1100 = -0.4800 = 0.1227 = -4.0000 = 0.2000 = 3.5200 = -0.0900 = -0.2700 = 0.1873 = 3.7300 = 9.8100 m m m m m m m m m m m m m m/sec2
4.1 E t u d e statique du systeme
C'est a l'aide du logiciel MATLAB que les valeurs a l'equilibre du systeme (9ieq, 62eq, yseq) ont ete determinees. Comme explique au chapitre 3, la derniere matrice de l'equation
3.23 doit etre nulle etant donne que chacune des equations de cette matrice represente la somme des forces et des moments a l'equilibre du systeme. Nous sommes done en pre-sence de trois equations et trois inconnues permettant de trouver les valeurs des positions a l'equilibre des composantes du systeme. Celles-ci sont compares a celles provenant du modele ANSYS au tableau 4.2.
T A B . 4.2: Resultats trouves pour les valeurs a l'equilibre du systeme nominal
Coordonnees generalisees a l'equilibre 9\eq &2eq V3eq Valeurs analytiques -6.6086e-4 rad 4.2000e~3 rad -7.0722e-4 m Valeurs numeriques -7.1272e-4 rad 4.7000e-3 rad -6.8755e-4 m
Ces valeurs indiquent que la cabine et les verins, pour atteindre leurs positions d'equilibre, s'abaissent sous l'effet du poids et entrainent alors une rotation de l'isolateur dans le sens anti-horaire.
Les valeurs a l'equilibre (9ieq, Q^eq et y3eq), lorsqu'elles sont comparees entres elles
(ap-proches analytique et numerique), sont tres (ap-proches. Une difference d'environ 2% a 12% apparait entre les deux methodes. II faut tout de meme considerer que ces valeurs sont tres petites comparativement a l'importance des proprietes du systeme comme les raideurs
des ressorts. Les differences sont possiblement dues a l'hypothese de 1'approximation des petits angles faite dans le calcul analytique et non numerique. Des erreurs numeriques du logiciel ANSYS peuvent aussi expliquer les differences calculees.
4.2 E t u d e dynamique du systeme
Frequences de r e s o n a n c e
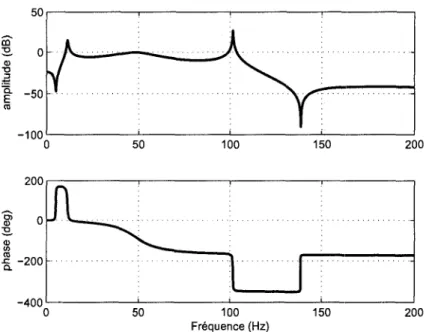
Afin de connaitre la transmissibilite du systeme, les equations analytiques 3.24 a 3.26 sont utilisees. Ces dernieres permettent de calculer la transmissibilite aux points d'at-taches des ressorts BC et PN et, en meme temps, les frequences de resonances amorties du systeme. Respectivement, les resultats trouves se retrouvent aux figures 4.1 et 4.2. Ces graphiques montrent deux frequences de resonances amorties bien definies. Une troisieme frequence entre les deux autres est aussi presente la ou il y a une legere elevation de la courbe de l'amplitude accompagnee d'une diminution de 180° de sa phase. Elle est peu apparente due a l'ajout d'amortissement dans le systeme theorique. Cet ajout d'amor-tissement diminue l'amplitude aux frequences et entraine alors un leger deplacement de la position de la frequence naturelle. C'est pour cela qu'il est question ici de frequences naturelles amorties plutot que de frequences naturelles. L'analyse numerique permet ega-lement de determiner les frequences naturelles du systeme verins-isolateur-cabine. Ces frequences (analytiques et numeriques) sont comparees au tableau 4.3. II est facile de remarquer que les resultats ne sont pas tout a fait identiques. Ceci s'explique simplement par le fait que les resultats analytiques representent les frequences naturelles amorties du systeme tandis que ceux numeriques sont des frequences naturelles non-amorties.
T A B . 4.3: Resultats trouves pour les frequences de resonance du systeme nominal Frequences de resonances Ui to2 UJ3 Valeurs analytiques amorties (Hz) 11.372 49.376 101.523 Valeurs numeriques (Hz) 11.360 49.421 101.540 20 20
I °
•g -20 f. -40 ra -60 ! i 40 60 80 100 120 140 200 •= 100 -100 -200 20 40 60 80 Frequence (Hz) 100 120 14050 CO S 0 Q. E -50 -100 50 100 150 200 200 -§_-200 -400 50 100 Frequence (Hz) 150 200
Si l'amortissement du systeme analytique est elimine, ces valeurs de frequences de reso-nances deviennent 11.360 Hz, 49.421 et 101.542 Hz. Elles sont identiques a celles donnees par ANSYS et demontrent alors que le modele analytique est juste. Les figures corres-pondantes aux transmissibilites lorsqu'il n'y a pas d'amortissement dans le systeme se retrouvent aux figures 4.3 et 4.4 superposees aux courbes avec amortissement.
~ 50 CD -50 20 40 60 80 100 120 140 200 100 0 J °- -100 -200 20 40 • ~ - \ V ^ \ X^;': avec amortissement sans amortissement • i i ' 60 80 Frequence (Hz) 100 120 140
~ 50 CD i -so -100 50 100 150 200 200 r-=r §> 0 x: 200 --400 50 ' .. , i 100 Frequence (Hz) 150 200
M o d e s d u s y s t e m e
Avec ANSYS, il est possible de visualiser les modes et de connaitre le comportement de la structure aux frequences de resonances. Les figures 4.5 a 4.7 presentent les trois modes de la structure (se referer a la section 3.2 pour l'explication des composantes). Pour le systeme analytique nominal, il est possible d'extraire les vecteurs propres a l'aide de la fonction eig de MATLAB (voir tableau 4.4). Chacun des modes de la structure est une combinaison des mouvements des trois coordonnees generalisees (0i, 62, 2/3)- Le tableau 4.4 et les figures 4.5 a 4.7 presentent les resultats analytiques et numeriques pour les trois vecteurs propres du systeme nominal. Les resultats analytiques et numeriques concordent et montrent les memes directions relatives et grandeurs des mouvements des composantes.
"H
Figure 4.6: Deuxieme mode du systeme nominal sur ANSYS.
Figure 4.7: Troisieme mode du systeme nominal sur ANSYS.
T A B . 4.4: Vecteurs propres normalises du systeme
Premier vecteur propre Deuxieme vecteur propre Troisieme vecteur propre analytique numerique analytique numerique analytique numerique 2/3 (m) 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 0i (rad) 1.0368 1.0368 -0.0095 -0.0095 -0.6051 -0.6053 02 (rad) -6.8840 -6.8840 2.6570 2.6569 -25.1923 -25.1908
4.3 E t u d e de sensibilite du systeme
Etant donne que l'analyse n'est realisee que sur l'optimisation de l'isolateur, il n'est pas possible de minimiser a la source la transmission des forces comrne le suggerait Swanson et coll. SWANSON et coll., 1993. L'etude sera plutot effectuee sur l'infiuence de certains parametres, comme la modification de la masse de l'isolateur, du deplacement de son centre de gravite ou la modification de la raideur des ressorts (composantes de caoutchouc) sur la transmissibilite du systeme. Sachant cela, il sera possible d'eloigner les frequences de resonances du systeme d'une gamme de frequence non desiree comme le propose Spiekermann et coll. SPIEKERMANN et coll., 1985. Ceci permettra alors d'attenuer ou du moins de ne pas amplifier les frequences causant probleme et ainsi reduire le bruit dans la cabine. Apres analyse de ces resultats, il sera facile d'optimiser l'isolateur en consequence. Comme l'amortissement des verins et de la cabine (c3 et c4)
n'affectent que l'amplitude des pics de resonances, les prochains calculs n'en tiendront pas compte afin de mieux faire ressortir ces resonances. Etant donne que c'est la position et non l'amplitude des frequences de resonances qui sont a l'etude dans ce projet et que la difference entre la position des frequences naturelles amorties et non-amorties est tres faible, il est possible de negliger ces termes. Dans ce chapitre, il n'est montre que les resultats pour la transmissibilite F\. L'annexe C presente les resultats pour la transmissibilite F2. Son comportement est similaire a celui de F\.
Modification de la masse de l'isolateur
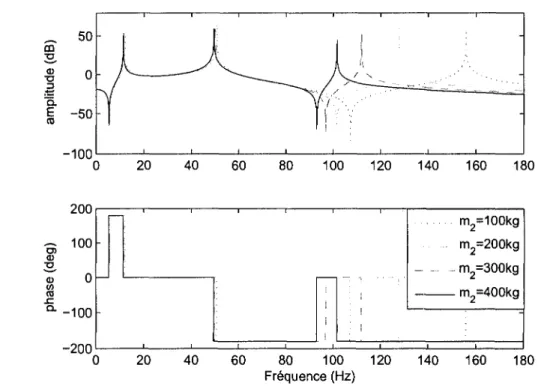
L'ajout ou la reduction de masse de l'isolateur peut influencer sa capacite a transmettre les vibrations des verins a la cabine. La transmissibilite correspondante a m-i = 400 kg est choisie comme etant celle nominale pour les futures comparaisons. Dans les graphiques 4.8 et 4.9, une comparaison des resultats est faite pour des masses de l'isolateur allant
de 100 a 700 kg. CD <u T3 3 "5. E 20 40 60 80 100 120 140 160 180 200 ^^ O) <1> 73 fl) tn (0 si Q. 1 0 0 0 -•inn -200 -1 -1 1 1 1 I"1 ' 1 1 1 1 I I 1 1. 1 ' • 1 1 m2=100kg m2=200kg ~m2=300kg m2=400kg 1 1 1 20 40 60 80 100 120 Frequence (Hz) 140 160 180
Figure 4.8: Transmissibilite F\ pour une diminution de la masse de l'isolateur (modele analytique).
CQ • u CD -a 3 Q . fc 50 0 -50 -100 200 CD 2, CO V) CO sz Q. -200 -400 20 40 60 80 Frequence (Hz)
T~"~
0 20I ;
-i 40 1 -•1 - '7j :l iI
^-~. 60 1 1 80 ) I1' l . I i m2=400kg m2=500kg _m2-600kg m2=700kg L._ .. 1 : 100 120Figure 4.9: Transmissibilite Fi pour une augmentation de la masse de l'isolateur (modele analytique).
Comme le montrent les graphiques (figs. 4.8 et 4.9), plus la masse de l'isolateur augmente et plus les frequences de resonances se deplacent vers la gauche ou diminuent. C'est ce qui devait etre observe. Par contre, le deplacement est limite pour les deux premiers pics. De plus, un changement de masse agit sur les caracteristiques du systeme a hautes frequences. En effet, a hautes frequences, les courbes ne se superposent pas contraire-ment a basses frequences. Egalecontraire-ment, les antiresonances sont interessantes a observer puisqu'elles peuvent etre positionnees a des endroits critiques afin de diminuer de fagon drastique d'importantes vibrations. La variation de la masse influence peu les antireso-nances.
Pour la structure a l'etude, l'ajout ou la diminution de la masse de l'isolateur influence davantage la frequence de resonance la plus haute. La figure 4.10 montre l'influence de la masse de l'isolateur sur les frequences du systeme. Ce graphique indique, par exemple, que pour une diminution de masse de 75%, la troisieme frequence augmente de plus de 50% comparativement a seulement environ 3% pour la deuxieme frequence et 6% pour la plus basse.
-75 -50 -25 0 25 50 75 Variation de la masse de l'isolateur (relativement a sa masse initiale (400kg)) (%)
Figure 4.10: Influence de la masse de l'isolateur sur les frequences de resonance de F-y.
La masse a done une influence interessante sur la transmissibilite du systeme. En somme, pour s'eloigner des frequences de vibrations des verins, si l'interet est de deplacer les frequences vers la gauche, l'ajout de masse agira en consequence ou vice-versa. Cette influence de la masse sur la transmissibilite est la meme pour Fi et F2.
Deplacement du centre de gravite de l'isolateur
Dans cette section, l'influence de la position du centre de gravite de l'isolateur sur la transmissibilite du systeme est etudiee. Les figures 4.11 et 4.12 montrent la variation de la transmissibilite Fi pour diverses positions du centre de gravite (c'est-a-dire de ±25% a ±-75% par rapport a la position de reference du centre de gravite). La configuration no-minate est celle dont le centre de gravite est a —0.32 m du point A {XAG2 = —0.32m)(voir
figure 3.2). QQ • o CD "5. £ CO 200 en T3 a. 100 0 — ' -100 -200 20 40 -I 1 i ! 1 1 1 1 i > i XAG = - °5 6 m xAQ = -0.48 m 2 xAQ =-0.40 m 2 xAQ = -0.32 m 2 ' 60 80 Frequence (Hz) 100 120 140
Figure 4.11: Transmissibilite Fi pour un deplacement vers la gauche du centre de gravite de l'isolateur (modele analytique).
CO 2-<u •a "o. E (0 -100 200 T3 03 </> as -200 h -400 I 50 100 150 200 Frequence (Hz) 300 .xA G = -0.32 m 2 xAQ =-0.24 m 2 xAG =-0.16 m 2 xAQ =-0.08 m 2 XAG = 0 m 2 250 300
Figure 4.12: Transmissibilite Fi pour un deplacement vers la droite du centre de gravite de l'isolateur (modele analytique).
Tout comme la modification de la masse de l'isolateur, le deplacement de son centre de gravite influence la transmissibilite du systeme. Encore une fois, c'est la troisieme frequence de resonance qui est la plus affectee par ce changement. La figure 4.13 presente le pourcentage de variation des frequences de resonance pour differentes positions du centre de gravite. Ainsi, la frequence la plus elevee augmente de 10% jusqu'a pres de 70% pour un deplacement de plus de 25% du centre de gravite de l'isolateur. La deuxieme frequence est aussi affectee de fagon importante. Elle se deplace jusqu'a 20% de sa valeur initiale. Par contre, le pic le plus bas ne reagit pas autant a ce changement. II est a remarquer ici que peu importe si le deplacement du centre de gravite est vers la gauche ou vers la droite, la deuxieme frequence diminue tandis que les deux autres reagissent dependamment de la direction du deplacement du centre de gravite. Ceci fait croire
que la position nominale du centre de gravite est pres d'un maximum pour la deuxieme frequence. Finalement, le deplacement des antiresonances est egalement interessant s'il est desire de les positionner a differents endroits strategiques.
75 65 55 45 -25 - • - 1 e r e frequence de resonance - • - 2e frequence de resonance - * - 3e frequence de resonance -75 -50 -25 0 25 50 75
Deplacement du centre de gravite de I'isolateur (relativement a sa position initiate (-0.32 m du point A ) ) (%)
Figure 4.13: Influence de la position du centre de gravite sur les frequences de resonance
deF
vEnfin, la position du centre de gravite influence de facon assez significative la transmis-sibilite. Cette propriete du systeme est done un critere a considerer pour modifier le concept en porte-a-faux des isolateurs afin d'ameliorer la qualite sonore dans la cabine. L'influence du centre de gravite sur la transmissibilite est similaire pour F\ et F2.
Modification des raideurs des ressorts BC et PN
II est egalement possible de modifier les raideurs des ressorts afin de varier la
transmissi-bilite du systeme cabine-isolateur-verins. Les prochains graphiques montrent l'influence de cette caracteristique. Tout d'abord, l'inrluence de la raideur du ressort BC est verifiee (voir figures 4.14 et 4.15). La raideur nominale est 62e6N/m.
T3 13 50 0 50 il ; i l i •• i i i i I i 1 •• } ' ^=r~^~^^r~^ _ _ . -i 200 CD • D a. -200 -400 20 0 20 40 60 80 100 40 60 80 Frequence (Hz) 100 120 140 ^=15.56° N/m ^=31.0e6Wm k1=46.5e6N/m k.,= 62.0e6 N/m 120 140
Figure 4.14: Transmissibilite F\ pour une diminution de la raideur du ressort BC (modele analytique).