THÈSE
Pour l'obtention du grade de
DOCTEUR DE L'UNIVERSITÉ DE POITIERS UFR des sciences fondamentales et appliquées
Pôle poitevin de recherche pour l'ingénieur en mécanique, matériaux et énergétique - PPRIMME (Poitiers)
(Diplôme National - Arrêté du 7 août 2006)
École doctorale : Sciences et ingénierie en matériaux, mécanique, énergétique et aéronautique -SIMMEA (Poitiers)
Secteur de recherche : Mécanique de solide, robotique médicale et système haptique
Présentée par : Houssem Saafi
Contribution à la conception, l'optimisation et à la mise en oeuvre d'interfaces haptiques à structures parallèles sphériques :
application à la télémanipulation de robots médicaux
Directeur(s) de Thèse :
Saïd Zeghloul, Mohamed Amine Laribi Soutenue le 01 décembre 2015 devant le jury
Jury :
Président Gérard Poisson Professeur des Universités, Université d'Orléans
Rapporteur Damien Chablat Directeur de recherche CNRS, École centrale de Nantes
Rapporteur Grigore Gogu Professeur des Universités, Institut français de mécanique avancée de Clermont-Ferrand
Membre Saïd Zeghloul Professeur des Universités, Université de Poitiers Membre Mohamed Amine Laribi Maître de conférences, Université de Poitiers Membre Marc Arsicault Maître de conférences, Université de Poitiers
Pour citer cette thèse :
Houssem Saafi. Contribution à la conception, l'optimisation et à la mise en oeuvre d'interfaces haptiques à structures parallèles sphériques : application à la télémanipulation de robots médicaux [En ligne]. Thèse
THÈSE
pour l'otention du Grde de
DCTEUR DE L'UNVERSITÉ DE ITIERS (Fculté des Sciences Fondmentles et Appliquées)
(Diplôme Ntionl - Arrêté du 7 oût 2006)
École doctorle S I M , M , É
A
Secteurs de Recherche : G , , T
Présentée par
HUSSEM SAAFI
CNTRIBUTIN À LA CNCETIN, L’TIMISATIN ET À LA MISE EN ŒUVRE D’INTERFACES HATIUES À STRUCTURES ARALLÈLES SHÉRIUES : ALICATIN À LA TÉLÉMANIULATIN DE RBTS
MÉDICAUX
Sous la direction de Saïd Zeghloul. Co-dirigée par Med Amine Laribi.
Soutenue le 01 Decemre 2015 devnt l commission d'Exmen
JURY
Gérrd oisson,Professeur à l'Uniersité d'Orléans résident
Dmien Chlt,Directeur de Recherche CNRS Rpporteur
Grigore Gogu,Professeur des Uniersités à l'IFMA Rpporteur Sïd eghloul,Professeur à l'Uniersité de Poitiers Exminteur Med Amine Lrii,Maître de conférences à l'Uniersité de Poitiers Exminteur Mrc Arsicult,Maître de conférences à l'Uniersité de Poitiers Exminteur
“
La science sans religion est boiteuse, la religion sans science est aveugle.”
de Albert EinsteinHoussem Saafi : Contribution à la conception, l’optimisation et à la mise en œuvre
d’interfaces haptiques à structures parallèles sphériques : application à la télémani-pulation de robots médicaux, © Novembre 2015
Remerciements
Je souhaite tout d’abord remercier mon directeur de cette thèse, le professeur Saïd Zeghloul pour m’avoir confié ce travail de recherche. Il m’a toujours apporté des conseils et des encouragements. Je remercie également mon co-encadrant, le docteur Med Amine Laribi pour son soutien technique et humain. La confiance et la grande liberté qu’ils m’ont accordé durant ces années de recherche m’ont été très précieuses. Je remercie les membres externes du Jury, les Professeurs Gérard Poisson, Grigore Gogu et Damien Chablat pour l’intérêt porté à ce travail de recherche.
Je remercie également les docteurs Jean-Pierre Gazeau et Marc Arsicault pour leurs aides et contributions dans le développement des prototypes expérimentaux. Je remercie le chirurgien Dr. Jérôme Cau pour ses conseils lors des expérimentations sur le système robotique. Mes remerciements vont également aux membres de l’équipe RoBioSS pour leur sympathie et leurs nombreux conseils : Pascal, Hussein, Philippe, Pierre, Antoine, Younes, Harisson, Margot et Jérémy.
Je tiens aussi à remercier tous les personnels du département Génie Mécanique et Systèmes Complexes pour leur soutien inconditionnel : Estelle Ferdinand, Mickaël Beau, Djamila Lagache et Catherine De Saint Martin.
Ce travail a pu être mené grâce à un financement assuré par Erasmus Mundus Al-Idrisi. Je remercie l’ensemble du personnel de l’équipe Al-Idrisi en particulier M. Otis Pioche-Dutheil pour son accueil et le travail de suivi durant ces années de thèse.
Résumé
Le travail mené dans cette thèse est une contribution au développement mécatro-nique d’interfaces haptiques pour un système de télé-opération dédié aux applications médicales du type chirurgie mini-invasive. Dans un premier temps, nous avons mené une évaluation d’une interface «maître» existante, ayant une architecture parallèle sphérique et développée au sein de l’équipe robotique de l’Institut PPRIME. Cette évaluation a montré la présence de singularités, en particulier des singularités pa-rallèles, à l’intérieur de l'espace du travail de l'interface. La présence de singularités altère le comportement cinématique en amplifiant les erreurs de résolution du modèle géométrique direct d’une part et les couples actionneurs lors du retour d’effort d’autre part. Dans un deuxième temps, différentes approches ont été proposées pour résoudre les problèmes liés à la présence des singularités. La première approche a consisté à utiliser la redondance de capteurs et la redondance d’actionneurs pour palier à ces effets dans la structure existante. Dans la seconde approche, nous avons proposé une nouvelle architecture mécanique optimale qui élimine les singularités présentes dans l’espace de travail. Les résultats obtenus, avec cette nouvelle structure à travers les essais expérimentaux réalisés sur le prototype, sont conformes aux objectifs fixés. Les deux interfaces haptiques ont été utilisées pour contrôler avec succès un robot dédié à la chirurgie mini-invasive. Le comportement du système global « robot esclave-interface haptique » ouvre des perspectives prometteuses aussi bien pour de futures études scientifiques que pour un transfert industriel.
Abstract
A contribution for a development of haptic devices for tele-operation system is presented in this thesis. This device is dedicated for medical applications such as mi-nimally invasive surgery tasks. In one first step, an evaluation of the existing master device is carried out. This device has a spherical parallel architecture and has been developed within the robotics team of PPRIME Institute. The evaluation of this de-vice has shown the presence of parallel singularities located in its workspace. This singularity alters the kinematic behavior of the structure by amplifying the errors in solving the forward kinematics and amplifying the actuator torques for the haptic feedback. In a second step, different approaches have been proposed to solve the pro-blems related to the presence of the singularities. The first approach consists in using redundancy of sensors and actuators for the existing structure in order to overcome the effects of singularities. In the second approach, we have proposed a new optimal mechanical architecture that eliminates the singularity. The results obtained with this new structure through the experimental testing of the prototype, are in accor-dance with the expected ones. The two haptic devices have been used to successfully control a robot dedicated to minimally invasive surgery. The behavior of the overall system “robot and haptic device” opens up promising prospects for future studies as well as for industrial transfer.
Table des matières
Introduction Générale 1
1 Système de télé-opération pour la chirurgie mini-invasive 4
1.1 Introduction . . . 4
1.2 Introduction sur la chirurgie mini-invasive . . . 5
1.2.1 Principe de la chirurgie mini-invasive . . . 5
1.2.2 Étude des gestes médicaux pour la chirurgie mini-invasive . . 7
1.2.3 Étude des efforts pour la chirurgie mini-invasive . . . 9
1.3 Système de télé-opération : état de l’art . . . 9
1.3.1 Systèmes commercialisés . . . 10
1.3.2 Systèmes développés dans le cadre de projets de recherche scientifique . . . 11
1.4 Système de télé-opération proposé par l’équipe RoBioSS . . . 13
1.4.1 Développement d’un robot chirurgical «esclave» . . . 14
1.4.2 Développement d’une interface « maître » . . . 16
1.4.3 Développement des stratégies de commande en position et en effort . . . 18
1.5 Conclusion . . . 18
2 Système « maître » : Robot Parallèle Sphérique. 20 2.1 Introduction . . . 20
2.2 Interface « maître » . . . 20
2.3 Robot parallèle sphérique . . . 22
2.4 Modèle géométrique . . . 25
2.4.1 Modèle géométrique inverse . . . 25
2.4.2 Modèle géométrique direct . . . 30
2.5 Modèle cinématique . . . 35
2.6 Modèle du retour haptique . . . 36
2.7 Instrumentation de l'interface « maître » . . . 36
2.8 Évaluation du robot parallèle sphérique . . . 38
2.9 Conclusion . . . 44
3 La redondance des actionneurs et des capteurs pour l’élimination de la singularité 46 3.1 Introduction . . . 46
3.2.1 Choix de la position du capteur supplémentaire . . . 48
3.2.2 Comparaison numérique des MGD . . . 51
3.2.3 Validation expérimentale du MGD amélioré . . . 57
3.3 Redondance des actionneurs . . . 62
3.3.1 Modèle cinématique du RPSredondant . . . 63
3.3.2 Validation numérique du modèle du RPS redondant . . . 65
3.3.3 Distribution optimale des couples actionneurs . . . 69
3.3.4 Validation expérimentale . . . 72
3.4 Conclusion . . . 77
4 Nouvelle architecture de l’interface «maître» 78 4.1 Introduction . . . 78
4.2 Etude de la nouvelle architecture . . . 78
4.3 Modèle géométrique inverse . . . 80
4.4 Modèle géométrique direct . . . 83
4.5 Modèle cinématique . . . 84
4.6 Évaluation cinématique de la nouvelle structure . . . 84
4.7 Optimisation de la nouvelle structure . . . 88
4.8 Évaluation de la nouvelle architecture optimisée . . . 92
4.8.1 Erreur de la résolution du MGD . . . 92
4.8.2 Retour haptique . . . 93
4.9 Amélioration du modèle géométrique direct . . . 95
4.10 Développement d'un prototype pour de la nouvelle architecture . . . 96
4.11 Validation expérimentale du MGD . . . 97
4.12 Conclusion . . . 98
5 Validation expérimentale du système de télé-opération 99 5.1 Introduction . . . 99
5.2 Contrôle en position . . . 99
5.2.1 Modèle de transformation géométrique . . . 100
5.2.2 Architecture Matérielle et logicielle . . . 102
5.2.3 Validation expérimentale . . . 105
5.3 Contrôle en effort . . . 110
5.3.1 Le modèle de compensation de gravité et de frottement de l’interface «maître» . . . 113
5.3.2 Architecture matérielle et logicielle . . . 115
5.3.3 Validation expérimentale . . . 116
5.4 Conclusion . . . 118
Conclusions et Perspectives 119
A Expressions des variables intermédiaires des modèles géométriques126
Table des figures
1.1 Composition d’un système de télé-opération. . . 4
1.2 Position et taille des incitions pour la chirurgie classique (a) et la chirurgie mini-invasive (b). . . 5
1.3 Principe de la chirurgie mini invasive (a), écran de visualisation (b). . 6
1.4 Système de télé-opération dédié à la CMI : (a) station «esclave» (b) station «maître». . . 7
1.5 Dispositifs expérimentaux : (a) « Pelvic Trainer » (b) les instruments utilisés lors de l’opération d’anastomose. . . 7
1.6 Mobilités des instruments dédiés à la chirurgie mini-invasive. . . 8
1.7 Espace de travail de l'opération d’anastomose. . . 9
1.8 Premiers robots utilisés dans des opérations chirurgicales complexes : (a) Puma 200 (b) Probot. . . 10
1.9 Le système de télé-opération Zeus : (a) Station «maître» (b) station «esclave». . . 10
1.10 Le système de télé-opération « Da Vinci » : (a) Station « maître » (b) station « esclave ». . . 11
1.11 Principe de système de télé-opération développé par l’équipe RoBioSS. 14 1.12 Robot chirurgical développée à l’institut Pprime par l’équipe RoBioSS. 15 1.13 Cinématique du porteur du robot chirurgical. . . 15
1.14 Les robots chirurgicaux développés à l'institut Pprime. . . 16
1.15 Premier prototype de l’interface maître. . . 17
1.16 Deuxième prototype de l’interface maître. . . 17
1.17 Troisième prototype de l’interface maître avec un actionneur redondant. 18 1.18 Quatrième prototype de l’interface maître. . . 18
2.1 Principe de fonctionnement des interfaces « maître » à retour haptique 20 2.2 Interfaces « maîtres » à architectures sérielles . . . 21
2.3 Interfaces « maîtres » à architectures hybrides . . . 21
2.4 interface Phantom® Premium. . . 22
2.5 Robots à architecture parallèle sphérique. . . 23
2.6 Robot parallèle sphérique. . . 23
2.7 Paramètres géométriques de la jambe A. . . 23
2.8 Les angles d'Euler. . . 24
2.9 Frontière de l'espace de travail utile dans le plan (ψ, θ) pour α1=26°. 25 2.10 Configuration de référence définit par (ψ, θ, φ) = (135°, 54.7°, 0°). . 25 2.11 Espace de travail dans le plan (ψ,θ) en fonction de la rotation propre φ. 27
2.12 Représentation géométrique de deux solutions. . . 28
2.13 Solutions du modèle géométrique inverse pour l'orientation (ψ, θ, φ) = (135°, 54°, 0°). . . 29
2.14 Système à quatre barres sphérique. . . 31
2.15 Systèmes à quatre bars sphérique considérés. . . 32
2.16 Représentation semi-graphique des solutions. . . 33
2.17 Solutions de modèle géométrique direct pour (θ1A, θ1B, θ1C) = (-90°, -90°, -90°). . . 35
2.18 Interface « maître ». . . 37
2.19 Système d'acquisition des angles actifs : a) Capteur absolu «MAB18A 12 0505», b) Carte d’acquisition «NI-PCI-6221». . . 37
2.20 Les actionneurs installés sur l'interface haptique : a) Moteur à courant continu «3257 G024 C R IE512», b) Moteur à courant continu «2232 U024 S R IE512». . . 38
2.21 Distribution de la dextérité en fonction de la rotation propre φ. . . . 39
2.22 Configurations de la singularité sérielle. . . 40
2.23 Le cas d'une configuration de singularité parallèle au centre de l'espace de travail pour (ψ, θ, φ) = (135°, 54.7°, 50°). . . 41
2.24 Variation de la rotation propre. . . 41
2.25 Démarche de calcul de l'erreur de la résolution du MGD. . . 42
2.26 Erreur de résolution du MGD. . . 42
2.27 Angles des articulations actives. . . 43
2.28 Les solutions de la rotation propre duMGD. . . 43
2.29 Orientation de la plateforme mobile. . . 44
2.30 Couples actionneurs. . . 44
3.1 Positions possibles du capteur supplémentaire. . . 48
3.2 Démarche de comparaison. . . 50
3.3 Distribution de l’erreur cumulée pour les deux cas. . . 51
3.4 Distribution de l’erreur cumulée pour le MGD amélioré et le MGD classique. . . 51
3.5 Démarche de comparaison. . . 52
3.6 Modèle « SimMechanics » représentant le RPS. . . 53
3.7 Les rotations propres obtenues pour les trois modèles géométriques directs. . . 54
3.8 Erreur de calcul duMGD classique. . . 54
3.9 Erreur de calcul duMGD du modèle SimMechanics. . . 54
3.10 Erreur de calcul duMGD amélioré. . . 55
3.11 Démarche de comparaison des trois modèles géométriques direct. . . . 55
3.12 Les rotations propres obtenues pour les trois modèles géométriques directs. . . 56
3.13 Erreur de calcul duMGD classique. . . 56
3.14 Erreur de calcul duMGD du modèle SimMechanics. . . 56
3.15 Erreur de calcul duMGD amélioré. . . 57
3.16 Dispositif de calibration. . . 57
3.18 Emplacement des marqueurs. . . 59
3.19 La rotation propre déterminée à l'aide de système de capture de mou-vement. . . 59
3.20 Variation des angles actifs (θ1A, θ1B, θ1C et θ3A). . . 59
3.21 Orientation de la plateforme mobile (ψ, θ, φ) . . . 60
3.22 Rotation propre calculée à l'aide des deux modèles. . . 60
3.23 Rotation propre calculée à l'aide des trois modèles. . . 61
3.24 La positions de l'actionneur redondant. . . 62
3.25 Le vecteur réciproque. . . 63
3.26 Démarche de validation . . . 65
3.27 Modèle duRPS redondant. . . 65
3.28 Le Modèle « SimMechanics » du RPSredondant. . . 66
3.29 Les deux configurations : (a)-(ψ, θ et φ)=(135°, 54°, 0°). (b)-(ψ, θ et φ)=(135°, 54°, 50°). . . 67
3.30 Les couples des actionneurs pour la configuration (conf. 1). . . 67
3.31 l’effort appliqué Tsim pour la configuration (conf. 1). . . 68
3.32 Les couples des actionneurs pour la configuration (conf. 2). . . 68
3.33 l’effort appliqué Tsim pour la configuration (conf. 2). . . 69
3.34 f(λ) pour λ entre 0° et 180°. . . 70
3.35 Couples actionneurs pour λ entre 0° et 180°. . . 70
3.36 trajectoire de l'interface mobile. . . 71
3.37 Effort de référence. . . 71
3.38 Évolution optimale de l'angle λ. . . 72
3.39 Couples actionneurs optimaux. . . 72
3.40 L'interface haptique avec un actionneur redondant. . . 73
3.41 Schéma de montage expérimental. . . 74
3.42 Matériels électroniques . . . 74
3.43 Comparaison entre l'effort désiré et l'effort mesuré. . . 75
3.44 Orientation de la plateforme mobile. . . 75
3.45 Évolution optimale de l’angle λ. . . 76
3.46 Distribution optimale des couples actionneurs. . . 76
4.1 Nouvelle architecture sphérique parallèle. . . 79
4.2 Nouvelle architecture de la jambe A. . . 79
4.3 Configuration de référence. . . 80
4.4 Représentation simplifiée de la jambe A avec la plateforme mobile. . 80
4.5 Les quatre modes de fonctionnement du nouveau robot sphérique pa-rallèle sphérique. . . 81
4.6 Représentation plane de la jambe A. . . 81
4.7 Espace de travail dans le plan (ψ,θ) en fonction de la rotation propre φ. 82 4.8 Le mécanisme à quatre barres sphériques considéré. . . 83
4.9 Distribution de la dextérité pour φ=0°. . . 85
4.10 Distribution de la dextérité pour φ=50°. . . 86
4.11 Distribution de la dextérité pour φ=-50°. . . 86
4.12 La distance entre le centre de l'espace de travail et la singularité. . . 87
4.14 La distribution de la dextérité pour φ=50°. . . 88
4.15 Frontière de l'espace de travail utile discrétisée. . . 89
4.16 Robot parallèle sphérique (RPS) optimal. . . 90
4.17 Distribution de la dextérité duRPS optimal. . . 91
4.18 Distribution de la dextérité pour φ=50°. . . 91
4.19 Démarche d'illustration de l'erreur de la résolution du MGD. . . 92
4.20 Variation de la rotation propre φ. . . 92
4.21 Erreur de résolution du MGD. . . 93
4.22 Effort de réference T (N). . . 94
4.23 Couples actionneurs (Nm). . . 94
4.24 Variation de la rotation propre φ. . . 96
4.25 Erreur de la résolution duMGD pour la rotation propre φ. . . 96
4.26 Prototype de la nouvelle interface. . . 97
4.27 Les variations angulaires des articulations : θ1A, θ1B, θ1C, θ3B. . . 97
4.28 Evolution de l’orientation de la plateforme mobile de la nouvelle in-terface haptique. . . 98
5.1 Schéma simplifié du contrôle en position. . . 100
5.2 Orientation de référence : (a)- Interface « maître », (b)- Robot « es-calve ». . . 100
5.3 Principe de la méthode de projection. . . 101
5.4 Exemple de la méthode de projection. . . 102
5.5 Architecture Matérielle. . . 102
5.6 IHM de l'application. . . 103
5.7 Machine d'état de l'application. . . 104
5.8 Filtrage des signaux. . . 105
5.9 Trajectoire expérimentale en cas de limitation de l’espace de travail. . 107
5.10 Variation de l'orientation. . . 107
5.11 Variation de la translation. . . 108
5.12 Valeurs des variables articulaires de l'interface « maître ». . . 108
5.13 Orientation du robot « maître » . . . 109
5.14 Orientation du robot « esclave » . . . 109
5.15 Comparaison entre les positions articulaires de référence et les positions articulaires réelles. . . 110
5.16 Schéma simplifié du contrôle en effort. . . 111
5.17 Emplacement du capteur d’efforts. . . 111
5.18 Composantes de vecteur d'efforts. . . 112
5.19 Orientation du vecteur force de la pesenteur par rapport au repère de la base. . . 113
5.20 Le centre de gravité d'un bras. . . 113
5.21 Modèle de frottement. . . 115
5.22 Architecture Matérielle. . . 116
5.23 Trajectoire circulaire imposée et Trajectoire conduite par l'utilisateur. 117 5.24 Les couples actionneurs. . . 117
5.25 Comparaison entre l'effort désiré et l'effort mesuré par le capteur d'effort.118 B.1 Triangle sphérique. . . 131
Liste des tableaux
1.1 Systèmes développés dans le cadre de projets de recherche scientifique. 12 4.1 Les limites inférieures et les limites supérieures des paramètres
géomé-triques. . . 90 5.1 Expérimentation sur la limitation de l'espace de travail. . . 106
Acronymes
Pprime Pôle Poitevin de Recherche pour l’Ingénieur en Mécanique, Matériaux et Énergétique
CMI Chirurgie Mini-Invasive RPS Robot Parallèle Sphérique MGI Modèle Géométrique Inverse MGD Modèle Géométrique Direct
Introduction Générale
La première utilisation des robots en chirurgie date du 11 avril 1985 où un robot Puma 200 a été utilisé pour une intervention de biopsie écho-guidée du cerveau dans un centre médical mémorial en Californie, aux États-Unis. Depuis cette date, des avancées majeures ont été réalisées.
Plusieurs systèmes robotiques dédiés à la chirurgie ont été proposés par les scienti-fiques durant ces dernières années. Cependant, seule une partie mineure des systèmes développés a été commercialisée. La majorité reste des prototypes dans les labora-toires de recherche. Le robot « Da Vinci » est commercialisé par Intuitive Surgical. Ce robot est présent dans plusieurs centres hospitaliers malgré le coût élevé de son acquisition et de sa maintenance, ainsi que la complexité de son installation. Un des objectifs de la recherche dans le domaine de la robotique médicale aujourd’hui est de proposer des systèmes robotiques compacts et à coût raisonnable dédiés à des applications spécifiques assurant un niveau de sécurité élevé.
La chirurgie mini-invasive est une branche de la chirurgie classique. Son atout est de réduire la taille des incisions afin de permettre un rétablissement rapide des patients. Les instruments pénètrent dans le corps du patient à travers ces petites inci-sions en utilisant des trocarts. Cela complique l’intervention des chirurgiens vu qu’ils n’ont plus un accès visuel direct sur la zone cible et leurs mouvements deviennent limités. Des systèmes de téléopération ont été proposés pour assister les chirurgiens en augmentant le confort et la sécurité lors des interventions complexes.
Depuis plusieurs années, l’équipe robotique de l'axe RoBioSS s’intéresse à la syn-thèse des systèmes robotiques pour des applications diverses. Parmi ces applications, nous trouvons le développement d’un système de télé-opération pour la chirurgie mini-invasive. Ce système est composé par une station «maître» et une station « esclave ». La station «maître» se compose de deux joysticks à retour d’effort qui commandent deux robots chirurgicaux installés dans la station « esclave ». Ces robots sont dévelop-pés dans le but de proposer un système de téléopération compact, à coût raisonnable et dédié à la chirurgie mini-invasive. Le système de téléopération «Da Vinci» permet aux chirurgiens seulement le retour visuel. Cela complique la tâche aux chirurgiens, car ils perdent la sensation et l’interaction avec le corps du patient. Le système en cours de développement à l’InstitutPprimeoffre un retour d’effort (retour haptique) afin d’augmenter l’immersion des chirurgiens.
Cette thèse est une contribution au développement de ce système de téléopéra-tion. Les travaux effectués dans le cadre de cette thèse s’inscrivent dans la suite des travaux précédemment développés dans cette thématique par l’équipe RoBioSS. Un
premier prototype du robot chirurgical a été élaboré par l’équipe. L’instrumentation, la commande et l’asservissement en position de ce robot ont été réalisés et expéri-mentés avant le début de cette thèse. Le développement d’une interface « maître » a commencé dans le cadre de la thèse de Chaker [Cha12]. Chaker a proposé l'utilisation d'une structure parallèle sphérique pour l’interface et a optimisé ces paramètres géo-métriques en tenant en considération les contraintes géogéo-métriques et cinématiques de la chirurgie mini-invasive. Ces paramètres ont été optimisés à l’aide des algo-rithmes génétiques et en considérant la dextérité et l’espace de travail comme deux critères d’optimisation. Cependant, l’interface développée présentait plusieurs limi-tations. Ces limitations sont identifiées et traitées dans le cadre de cette thèse afin de disposer d’une interface capable de commander le robot chirurgical et assurer le retour d'efforts à l’utilisateur.
Ce mémoire de thèse se compose de cinq chapitres. Dans le premier, nous présen-tons les objectifs du système de téléopération développé à l’Institut Pprime. Dans la première partie du premier chapitre, nous présentons brièvement la chirurgie mini-invasive. Nous décrivons une étude menée par l'axe RoBioSS sur l'analyse des gestes médicaux et les efforts des interactions entre le chirurgien et le corps du patient. Dans la seconde partie, nous présentons un état de l’art sur les différents systèmes de téléopération existants. Dans la dernière partie de ce chapitre, nous dévoilons le système de téléopération développé à l’Institut Pprime.
Dans le deuxième chapitre, nous présentons la cinématique du premier prototype de l’interface « maître ». L’interface a une structure parallèle sphérique. Les modèles géométriques et cinématiques de cette architecture sont détaillés dans la deuxième partie du chapitre. Ces modèles sont utilisés dans la mise en place du contrôle en po-sition et en effort. Ils sont utilisés également dans l'évaluation de l’interface « maître ». Cette évaluation est présentée à la fin de ce chapitre. Elle montre la présence de la singularité parallèle à l'intérieur de l’espace du travail du robot parallèle sphérique. La singularité a des conséquences néfastes sur la précision des modèles géométriques en particulier le modèle géométrique direct. La présence de singularité altère le com-portement cinématique en amplifiant les erreurs de résolution du modèle géométrique direct d’une part et les couples actionneurs lors du retour d’effort d’autre part.
Dans le troisième chapitre, nous présentons deux solutions basées sur la redondance des capteurs et des actionneurs pour éliminer les effets de la singularité. La première partie de ce chapitre se consacre à la présentation de la solution basée sur l’ajout d’un capteur supplémentaire. Cette solution est proposée dans le but d'éliminer les effets de la singularité sur le calcul du modèle géométrique direct. Une étude comparative est élaborée afin de justifier le choix de l'emplacement du capteur supplémentaire. Ensuite, une validation expérimentale et numérique est présentée. Dans la deuxième partie de ce chapitre, nous étudions la solution basée sur la redondance d’actionneurs. L’ajout d’un actionneur rend les solutions de la distribution des couples actionneurs infinie. Une méthode d’optimisation de la distribution des couples actionneurs est proposée. Une validation numérique et expérimentale est présentée à la fin de cette partie.
L’ajout du moteur redondant alourdit la plateforme mobile de l’interface «maître». Une nouvelle solution est proposée dans le quatrième chapitre. Cette solution se base
sur le changement de la cinématique d’une jambe du robot parallèle sphérique. Les nouveaux modèles géométriques et cinématiques sont détaillés dans ce chapitre. Les paramètres géométriques de la nouvelle interface sont optimisés afin d’avoir un espace sans présence de singularités. Le prototype de cette nouvelle interface est présenté à la fin de ce chapitre.
Le cinquième chapitre décrit une validation expérimentale du système de télé-opération. Nous présentons dans la première partie l'architecture de la commande en position entre l'interface «maître» et le robot «esclave». Une validation expérimentale de ce mode de contrôle est présentée à la fin de cette partie. Dans la deuxième partie de ce chapitre, nous détaillons l'architecture de la commande en effort. Le capteur d’efforts étant en cours d’installation sur le robot «esclave», les expérimentations sont établies uniquement pour l’interface «maître». Les validations expérimentales sont présentées à la fin de ce chapitre.
Ce mémoire se termine par une conclusion générale et des perspectives à ces tra-vaux de recherche.
Chapitre 1
Systèmedetélé-opérationpourlachirurgiemini-invasive
1.1 Introduction
Les premiers systèmes de télé-opération ont été développés pour l’industrie nu-cléaire [C53, CAM58, You58]. Le risque de contamination par des objets nocifs a amené les chercheurs à développer des outils pour leur manipulation à distance. Le premier système de télémanipulation a été conçu en 1947. C’est un système purement mécanique basé sur l’utilisation des pantographes [C53]. En 1958, il y a eu l’apparition du premier système de télémanipulation équipé d'actionneurs pour permettre un re-tour haptique [CAM58].
Les télémanipulateurs sont introduits dans le domaine médical suite au progrès de la vision et aux avancées dans le domaine de la robotique. Le premier système de télémanipulation développé pour des interventions chirurgicales est apparu en 1995 [EN05]. Ce système appelé « ZEUS » a été développé par la société américaine «Computer Motion».
Les systèmes de télé-opération sont composés d’une station de commande dite système «maître» et d’une station opératoire dite système «esclave» (Figure 1.1). La liaison entre le système «maître» et le système «esclave» est assurée par des systèmes de communications qui peuvent être l'utilisation d'un simple câble réseau jusqu’à l'utilisation des satellites ou des drones.
Opérateur Système Environnement
Maître Système Esclave Système de Communication Supervision Système de Télé-opération
Commande en position retour d'effort
Le système « esclave » peut être un système physique, c’est-à-dire un système robotique définit par ses caractéristiques mécaniques. Ou bien un système virtuel et dans ce cas nous parlons de la réalité virtuelle.
Le système « maître » dans tous les cas est un système « physique ». Cependant, son architecture et sa complexité varient selon l’application visée.
Le retour d’effort dans un système de télé-opération n'est pas toujours présent. Plusieurs systèmes de télé-opération n’incluent pas la possibilité de retour haptique. En effet, le fameux système de télé-opération pour la chirurgie applé « Da-Vinci » n’inclut pas le retour haptique [Pal09].
Dans ce chapitre, nous présentons une introduction sur la chirurgie mini-invasive. Ensuite, nous présentons un état de l’art sur les robots utilisés dans le domaine chirurgical. Enfin, nous présentons un système de télé-opération dédié à la chirurgie mini-invasive en cours de développement à l’institut Pprime.
1.2 Introduction sur la chirurgie mini-invasive
1.2.1 Principe de la chirurgie mini-invasive
La chirurgie classique (ouverte) consiste à faire une grosse ouverture dans le corps du patient pour que le chirurgien puisse accéder à la zone d’intervention en ayant une vision directe sur la cible. Pour ce type de chirurgie, les conséquences de la grande taille d’incision sont :
– saignement abondant lors de l’opération chirurgicale et nécessité d'une éventuelle transfusion sanguine ;
– douleur post-opératoire importante ; – présence des cicatrices inesthétiques ; – risque d’infection élevé ;
– durée d'hospitalisation longue ;
– durée de rétablissement et de retour à une activité normale étendue.
(a) (b)
Figure 1.2 – Position et taille des incitions pour la chirurgie classique (a) et la chirurgie mini-invasive (b).
La Chirurgie Mini-Invasive (CMI) est apparue pour réduire les traumatismes des opérations chirurgicales, en diminuant les tailles des incisions. Elle consiste à passer
les instruments médicaux (pinces, ciseaux, portes aiguilles…) à travers des petites incisions en utilisant des trocarts. La figure 1.2 montre les positions et les tailles des incisions pour la chirurgie ouverte et la chirurgie mini-invasive pour le cas d'une intervention sur la vésicule biliaire. Les avantages de la chirurgie mini-invasive grâce aux tailles très réduites des incisions qui sont inférieures à 1 cm de diamètre, sont :
– risque d’infection réduit ;
– probabilités de saignement peropératoire très réduit ; – durée d’hospitalisation très courte (voire ambulatoire) ;
– durée de rétablissement et de retour à une activité normale courte ; – cicatrices des petites tailles ;
– douleurs post-opératoire faibles.
La CMI est apparue suite aux progrès techniques de la vision médicale. Comme la vision directe de la zone cible est supprimée, le chirurgien peut seulement suivre l’opération sur un écran qui transmet un flux d’images de la cavité abdominale autour de cette zone (Figure 1.3). Ce flux d’images est obtenu grâce à une caméra introduite dans le corps de patient.
(a) (b)
Figure 1.3 – Principe de la chirurgie mini invasive (a), écran de visualisation (b).
La chirurgie mini-invasive présente également des inconvénients. En effet, réduire la taille des incisions augmente la complexité de l’opération chirurgicale. Ainsi, le système de vision classique ne permet pas d'apprécier la profondeur. Les chirurgiens aptes à faire de laCMIsont des chirurgiens experts, largement entrainés, qui arrivent à s'accommoder d'une vision 2D.
Les systèmes de télé-opérations médicaux sont introduits pour assister les rurgiens en améliorant leurs conforts, la précision et la sécurité des opérations chi-rurgicales. Les instruments sont portés par des robots conçus spécialement pour la chirurgie mini-invasive (Figure 1.4). Ces robots doivent être capables de manipuler des outils (porte aiguille, ciseaux …) à l’intérieur du corps du patient en passant par des trocarts insérés dans les petites incisions. Le chirurgien commande ces robots en utilisant des interfaces dédiées. Ces interfaces peuvent être des simples joysticks jusqu’à des systèmes mécaniquement plus complexes avec un retour haptique (effort). Le chirurgien suit l’opération à l’aide d’un écran qui permet un retour visuel classique (2D) ou un retour visuel plus avancé en utilisant un écran stéréoscopique (3D).
(a) (b)
Figure 1.4 – Système de télé-opération dédié à la CMI : (a) station «esclave» (b) station «maître».
En séparant le chirurgien du patient, une opération chirurgicale à distance (entre continents par exemple) devient possible. Cependant, plusieurs limitations en terme de sécurité et avancée technique rendent cette supposition impossible à nos jours.
Plusieurs systèmes de télé-opération dédiés à laCMIont été proposés. Ces systèmes sont présentés dans le paragraphe 1.3.
1.2.2 Étude des gestes médicaux pour la chirurgie mini-invasive
Dans des travaux précédents [BZ10, LRAZ12, LRAZ13], le système de capture de mouvement Vicon® a été utilisé pour analyser les gestes de plusieurs chirur-giens (un expert et des apprentis) lors d’une opération d’anastomose sur une sta-tion d’entrainement (Pelvic trainer) (Figure1.5a). L’opération d’anastomose (suture) consiste à relier deux éléments tubulaires (prothèse d’artère).
(a) (b)
Figure 1.5 – Dispositifs expérimentaux : (a) « Pelvic Trainer » (b) les instruments utilisés lors de l’opération d’anastomose.
Les instruments utilisés sont une pince et un porte aiguille (Figure 1.5b). Ils sont équipés de marqueurs réfléchissants afin de capturer leurs mouvements. Le système Vicon® traque ces marqueurs à l’aide de caméras infrarouges avec une précision de l'ordre de 1mm.
L’objectif de cette étude est d’identifier l’espace de travail du geste médical. Ceci permettra par la suite le choix des architectures et des dimensions des robots déve-loppés pour réaliser la même tâche.
La figure 1.6 montre les mobilités d’un instrument inséré dans le corps d’un pa-tient. Si nous négligions l’élasticité du corps du patient, les seuls mouvements pos-sibles sont trois rotations autours du point d’incision et une translation selon l’axe de l’instrument. Les trois rotations se devisent en deux catégories : deux rotations d’inclinaison et une rotation propre. Pour certains instruments, la rotation propre peut être générée de deux manières : soit en tournant la main, soit en tournant la molette à l’aide du doigt.
L’espace de travail est décrit par un cône dont le sommet est situé au point d’incision.
Instrument
Trocart
Peau
O
1 rotation propre
2 rotations d'inclunison
autour du point
d'incision O
1 translation
Figure 1.6 – Mobilités des instruments dédiés à la chirurgie mini-invasive.
L’étude avec le système Vicon® a pour but d’identifier l’angle d’ouverture du cône pour chaque instrument. L’espace de travail est représenté à la figure 1.7. Pour la pince, le demi-angle au sommet est égal à 26° et pour le porte aiguille il vaut 17°.
La course de la translation est égale à 112mm.
La rotation propre n’a pas été considérée dans cette étude. Pour le porte aiguille, la rotation propre est établie par la rotation de la main du chirurgien. Dans la littérature [Bed10, Hen11], nous trouvons qu’elle est limitée à ±90°. Pour la pince, la rotation propre est générée aussi par la rotation de la molette. Dans ce cas la rotation propre est infinie dans les deux sens.
Les robots « esclave » et « maître » doivent avoir au minimum quatre degrés de liberté et un espace de travail qui englobe l’espace de travail identifié pour pouvoir reproduire les mouvements des chirurgiens.
α
1α
2Incisions
X
Y
Z
(1)- Espace de travail
de la pince.
(2)- Espace de travail
du porte aiguille.
(1)
(2)
Figure 1.7 – Espace de travail de l'opération d’anastomose.
1.2.3 Étude des efforts pour la chirurgie mini-invasive
Les chirurgiens utilisent leur sens du toucher pendant une intervention chirur-gicale pour maitriser l’interaction avec le corps du patient. Ce sens du toucher se devise en deux catégories : kinesthésique et tactile. La détection kinesthésique est principalement utilisée pour examiner les propriétés mécaniques comme la raideur, l’amortissement, la géométrie et le poids. La détection par rétroaction tactile indique la chaleur, la pression et la texture.
La chirurgie mini-invasive supprime la sensation tactile car les chirurgiens ne sont plus en contact direct avec le corps du patient. Les seules sensations possibles sont donc la sensation de la raideur, la sensation de l’amortissement, la sensation de la géométrie et la sensation du poids.
La sensation du toucher est caractérisée par la valeur et la fréquence de l’effort. La fréquence est 320 Hz pour la sensation tactile et 30 Hz pour la sensation kinesthé-sique. La sensation d’effort dépend de l’état de la fatigue musculaire du chirurgien. Si la fatigue augmente, la sensation de force perçue augmente même si l’effort reste constant.
Dans la littérature [vdBHR+09,Bed10,Hen11], nous trouvons que l’effort nominal
pour l’application chirurgicale est de l’ordre de 10 N et l’effort maximal est 20 N. La valeur minimale d’effort qui peut être détectée par la main est égale à 0,06 N.
1.3 Système de télé-opération : état de l’art
La première utilisation d'un robot pour une opération chirurgicale date du 11 avril 1985, quand un robot puma 200 a contribué à une opération de biopsie neurochirur-gicale (figure1.8a) [KHJH88]. Le but de cette opération était d'utiliser une structure
mécanique robuste pour insérer une sonde afin d’atteindre une cible chirurgicale pro-fonde dans le cerveau avec une trajectoire rectiligne en évitant les zones vitales du cerveau. L’utilisation de ce robot avait pour but d’augmenter la précision et la rapidité de l’opération.
En 1991, c’est la première fois qu’un dispositif robotique, appelé « Probot », a été utilisé pour éliminer de manière autonome une quantité importante de tissu provenant de la prostate d'un patient [DHN+91]. Ce dispositif est présenté dans la figure 1.8b.
L’opération a été faite en avril 1991 à Londres, Royaume-Uni.
(a) (b)
Figure 1.8 – Premiers robots utilisés dans des opérations chirurgicales complexes : (a) Puma 200 (b) Probot.
Depuis 1991, plusieurs systèmes de télé-opérations ont été proposés. Ces systèmes se devisent en deux catégories : les systèmes commercialisés et les systèmes développés dans le cadre de projets de recherche scientifique.
1.3.1 Systèmes commercialisés
(a) (b)
Figure 1.9 – Le système de télé-opération Zeus : (a) Station «maître» (b) station «esclave».
« Zeus » est le premier système de télé-opération développé pour la chirurgie mini-invasive par la société « Computer Motion » (figure1.9) [EN05]. La station «maître»
du système «Zeus» est composée d’un large écran et deux joysticks. Ces joysticks ont une architecture sérielle permettant de contrôler quatre degrés de liberté (trois rotations et une translation). Tous les axes de liaisons sont concourants en un même point. La station « esclave » contient trois bras robotisés. Deux bras portent les ins-truments et un troisième porte une caméra. Le système « Zeus » a eu son autorisation de commercialisation par l’institution américaine « Food and Drug Administration » en 2001. Il a été interrompu suite à la fusion entre « Computer Motion » et « Intuitive Surgical ». « Intuitive Surgical » est la société qui a développé le système de télé-opération « Da Vinci » [Pal09]. Le système de télé-opération chirurgical « Da-Vinci » est présenté dans la figure1.10. Ce système possède six degrés de liberté. Il permet seulement un retour visuel soit en 2D ou en 3D. Tous les bras robotiques ont une architecture sérielle.
(a) (b)
Figure 1.10 – Le système de télé-opération « Da Vinci » : (a) Station « maître » (b) station « esclave ».
En France, plus de quatre-vingt hôpitaux possèdent ce robot dans leurs blocs opératoires et plusieurs dizaines de milliers de patients ont été opérés par ce système. Ces systèmes robotiques sont encombrants (une salle opératoire est nécessaire pour contenir le système) et chers (le coût du « Da-Vinci system » ( maintenance comprise) est supérieur à deux millions d’euros). Ce prix semble excessif, en égard aux problèmes de sécurité relevés par les experts médicaux. Plusieurs pannes matérielles et des décès ont été signalés dans le monde (un décès est signalé en France suite à une erreur de manipulation du robot « Da-Vinci »).
Le système de télé-opération de l’Institut Pprimea été développé pour répondre à ces questions de sécurité, de coût et de taille.
1.3.2 Systèmes développés dans le cadre de projets de recherche scientifique
Plusieurs systèmes de télé-opération dédiés à la chirurgie mini-invasive ont été développés dans le cadre de la recherche. Ces systèmes sont illustrés dans le tableau suivant :
Table 1.1 – Systèmes développés dans le cadre de projets de recherche scientifique.
Système de télé-opération Descriptions
Le système de télé-opération du Uni-versité technique d'Eindhoven est composé de trois bras robotisés ap-pelés « Sofie » [vdBHR+09, Bed10]
et deux interfaces haptiques [Hen11]. Sofie est un robot à 4 degrés de li-berté. Son architecture se base sur le système à «pantographe» pour avoir un centre instantané de rotation dis-tant. Un capteur d’efforts 6 com-posantes est placé dans l’effecteur. L’interface haptique possède 4 de-grés de liberté. Elle est basée sur une architecture sérielle. Des actionneurs sont placés sur l’interface pour per-mettre le retour haptique.
Robot chirurgical « Sofie »
Interface haptique
Le système de télé-opération du centre allemand de recherche aé-rospatiale (DLR) est composé de trois bras robotisés appelés « MIRO » [HKT+10] et des interfaces
hap-tiques appelé « 7 sigma » [TH13]. MIRO est un robot à 7 degrés de li-berté. Les actionneurs du robot sont intégrés dans les articulations pour alléger la structure. L’interface hap-tique « 7 sigma » est une interface à 7 degrés de liberté. La structure de l’interface se compose d'une par-tie parallèle (robot delta) et d'une partie sérielle (poignée sphérique). Ce capteur d’efforts 6 axes est placé dans l’effecteur pour contrôler le re-tour haptique.
Robot chirurgical « MIRO »
Système de télé-opération Descriptions
RobIn est un robot à 7 degrés de li-berté (porteur et effecteur) [NK08]. Il est développé en Pologne et est destiné à des opérations de chirur-gie mini invasive. Son architecture se base sur le système à « pantographe » pour avoir un centre instantané de rotation distant. L’interface hap-tique possède 7 degrés de liberté. Elle est basée sur une architecture sérielle. Ce système n’intègre pas la commande haptique.
Robot chirurgical « RobIn »
Interface haptique
«Raven» est un robot chirurgical dé-veloppé à l’Université de Washington [LFS+09, HRF+13]. Il possède une
ar-chitecture sérielle sphérique. Les ac-tionneurs de «Raven» sont placés sur la base pour alléger la partie mobile. Tous les systèmes de transmissions sont des systèmes à câbles.
Robot chirurgical «Raven»
1.4 Système de télé-opération proposé par l’équipe RoBioSS
Le principe du système de télé-opération proposé par l’équipe RoBioSS est présenté dans la figure 1.11. Il se compose d’une station « esclave » et une station « maître » reliées par une unité de contrôle. Le chirurgien manipule les interfaces « maître » pour contrôler les robots chirurgicaux. Il suit l’opération à travers un écran.
L’objectif du système de télé-opération n’est pas de remplacer le chirurgien mais plutôt de l’assister pendant les opérations chirurgicales en augmentent la précision, la sécurité et l’efficacité de ses gestes. Aussi, le système de télé-opération est conçu pour apporter plus de confort pendant les opérations.
Ce système de télé-opération intègre deux modes de contrôle : un contrôle en position/vitesse dans le sens direct et un contrôle en effort dans le sens inverse. Le schéma de contrôle est présenté dans la figure suivante :
Chirurgien écran Station «Maître» Système de contrôle Station «Esclave» commande en position Chirurgien adjoint commande en effort
Figure 1.11 – Principe de système de télé-opération développé par l’équipe RoBioSS.
L’interface «maître» contrôle la position du robot chirurgical et restitue en même temps les efforts générés lors de l’interaction entre l’instrument et le corps du pa-tient. Ces efforts sont mesurés par un capteur d’effort placé sur l’effecteur du robot «esclave».
Le système de contrôle se compose de deux sous-systèmes : un sous-système "haut niveau" et un sous-système "bas niveau". Le sous-système haut niveau est un PC équipé d’une carte d’acquisition et des cartes réseaux qui assure l’acquisition des données des capteurs, les calculs des consignes des positions, des vitesses et des couples moteurs qui seront transférés par la suite au sous-système bas niveau. Le système bas niveau assure l’asservissement des moteurs installés sur les robots chirurgicaux et les interfaces haptiques en position et en effort respectivement. Ces systèmes seront détaillés dans le chapitre 5.
Le robot « esclave » et l’interface « maître » sont développés à l’aide des in-formations étudiées dans la section 1.2.2. Ces informations sont les paramètres géo-métriques, cinématiques et dynamiques du geste de la chirurgie mini-invasive. Ces paramètres ont permis dans des travaux précédents l’identification de l’architecture, le dimensionnement et le choix de la motorisation de deux robots. Les développe-ments des robots « maître » et « esclave » sont détaillés dans les deux paragraphes suivants.
1.4.1 Développement d’un robot chirurgical «esclae»
Dans des travaux précédents [LARZ12, LRAZ12, LRAZ13], un robot « esclave » pour la CMI a été développé figure 1.12. Le porteur du robot chirurgical a une architecture sérielle sphérique 4 degrés de liberté.
Figure 1.12 – Robot chirurgical développée à l’institutPprimepar l’équipe RoBioSS.
Le porteur du robot chirurgical est composé par trois liaisons pivots à axes concou-rants et une glissière reliant les trois bras et l’effecteur. La cinématique du porteur est présentée dans la figure1.13. Cette architecture reproduit les mouvements de la chi-rurgie mini-invasive que nous avons présenté dans la section1.2.2. Cette architecture a conduit au développement d’un robot compact et léger.
Z
1Z
2Z
3 X0 Y0 Z0 O0Figure 1.13 – Cinématique du porteur du robot chirurgical.
Les paramètres géométriques du porteur sont définis par l’angle du bras proximal (lié à la base) noté αproximal, l’angle du bras distal noté αdistal, et la course de la
trans-lation définie par les distances maximale et minimale entre le bout de l’instrument et le centre instantané de rotation notées Dmax et Dmin respectivement. Les valeurs de
ces paramètres ont été définies en tenant compte des résultats de l’étude de l’espace de travail de la CMI. Pour les angles αproximal et αdistal, le plus grand demi angle au
sommet (α1=26°) été considéré et augmenté de 4° afin de s’éloigner de la singularité
sérielle. La singularité sérielle apparaît lorsque les bras proximal et distal sont com-plètement tendus ou comcom-plètement repliés. La course de la translation est égale à 112 mm. Les paramètres géométriques du robot chirurgical sont :
(αproximal, αdistal, Dmax, Dmin) = (30°, 30°, 166.5mm, 278.5mm)
Le matériau choisi pour fabriquer la structure mécanique des bras est un alliage d’aluminium choisi pour sa légèreté et ses caractéristiques mécaniques.
Les actionneurs avec leurs réducteurs (Harmonic drive) sont intégrés à l'interieur de segments du robot. Ces actionneurs sont des moteurs à arbre creux assurant la
liaison mécanique. Des capteurs angulaires absolus sont montés dans les articulations pour la prise d’origine (HOMMING). Un automate de contrôle d’axe appelé « Galil© », contrôle en position et en vitesse les quatre moteurs du porteur. Une application développée sur un PC calcule en temps réel les positions et vitesses articulaires à l’aide du modèle géométrique inverse et les transfère comme consignes à l’automate.
Les instruments médicaux sont placés dans un effecteur qui dispose de deux de-grés de liberté. Ces dede-grés de liberté sont une rotation propre autour de l’axe de l’instrument et la fermeture et l'ouverture de la pince. Cette rotation propre est re-dondante puisqu'elle est également générée par la troisième articulation du porteur. Après une validation expérimentale du premier prototype, un deuxième robot iden-tique est développé. La figure 1.14a montre les deux prototypes. Un troisième proto-type est aussi développé avec une architecture légèrement différente (Figure 1.14b). Cette architecture élimine la redondance de la rotation propre par la suppression de la troisième articulation. Dans ce cas la rotation propre est générée uniquement par l’effecteur.
(a) (b)
Figure 1.14 – Les robots chirurgicaux développés à l'institut Pprime.
1.4.2 Développement d’une interface « maître »
Un premier prototype de l’interface « maître » a été développé dans le cadre de la thèse de Chaker [Cha12]. Le choix de l’architecture, le dimensionnement et le choix des actionneurs de l’interface ont été élaborés dans ces travaux de thèse.
La figure 1.15montre l’interface « maître » développée. Elle possède une architec-ture parallèle sphérique qui offre trois degrés de liberté en rotation pure. Les para-mètres géométriques de cette interface ont été optimisés afin d’avoir une architecture compacte et un bon comportement cinématique. Cependant du fait de la non consi-dération de la rotation propre, cette interface souffre de la présence de singularités dans son espace de travail. La résolution de ce problème de singularités constitue un des objectifs de cette thèse. Cette problématique sera présentée dans les chapitres suivants ainsi que les solutions proposées.
La résolution du Modèle Géométrique Direct (MGD) du Robot Parallèle Sphérique (RPS) est nécessaire pour l’établissement de la stratégie de contrôle en position et en effort. Ce modèle est étudié dans le cadre de cette thèse. Une solution pour rendre leMGD fonctionnel en temps réel est proposée dans le chapitre 3. Cette solution est ensuite validée expérimentalement.
Figure 1.15 – Premier prototype de l’interface maître.
Un mécanisme qui assure la translation a été installé sur la plateforme mobile de la structure parallèle sphérique. Compte tenu du problème lié au frottement et à l’arcboutement de la liaison glissière en place sur le premier prototype, une deuxième solution basée sur un système rail à billes a été proposée et réalisée dans le cadre de cette thèse. Cette nouvelle solution est présentée dans la figure 1.16.
Pour éliminer l'impact du problème de la singularité sur la précision du modèle géométrique direct, une solution basée sur la redondance du capteur est developpée. Cette solution est détaillée dans la première partie de chapitre 3.
Figure 1.16 – Deuxième prototype de l’interface maître.
Afin d’assurer le retour haptique dans des configurations singulières, une solution basée sur la redondance des actionneurs est développé (figure 1.17). Cette solution est détaillée également dans le chapitre3.
L’introduction d’un actionneur supplémentaire sur l’interface mobile alourdit la plateforme mobile duRPSet augmente les couples actionneurs nécessaires pour com-penser les efforts dus aux poids et aux frottements. Pour cela, une deuxième solution
Figure 1.17 – Troisième prototype de l’interface maître avec un actionneur redondant.
basée sur le changement de la cinématique d’une jambe est proposée (figure 1.18) dans le chapitre 4.
Figure 1.18 – Quatrième prototype de l’interface maître.
1.4.3 Développement des stratégies de commande en position et en effort
Les stratégies de commande en position et en effort ont été développées dans cette thèse. La commande en position est établie en utilisant le prototype présenté à la figure 1.16. Les expérimentations sont présentées dans le chapitre5.
La démarche de la commande en effort est établie et présentée également dans ce chapitre. Cependant, le capteur d’effort est en cours d’installation sur le robot esclave. Aussi, nous présentons uniquement l’implémentation du retour haptique sur l’interface maître sans validation en utilisant le robot esclave.
1.5 Conclusion
Dans ce chapitre, nous avons présenté le cadre global de cette thèse. Cette thèse est une contribution au développement d’un système de télé-opération pour la chi-rurgie invasive. Au début de ce chapitre, nous avons introduit la chichi-rurgie mini-invasive. Nous avons présenté une étude sur la CMI afin de caractériser la tâche médicale par ce qui est du mouvement et des efforts. Ensuite, nous avons présenté
un état de l’art sur les systèmes de télé-opération existants et nous avons identifié quelques limitations. Enfin, nous avons présenté le système de télé-opération déve-loppé à l’institut Pprime. Les chapitres suivant détaillent notre contribution dans le cadre de cette thèse pour le développement de ce système de télé-opération.
Chapitre 2
Système « maître » : Robot Parallèle Sphérique.
2.1 Introduction
Les interfaces « maîtres » sont développées pour permettre aux utilisateurs d'in-teragir avec un environement distant (réel ou virtuel) (Figure 2.1). La plupart des interfaces « maître » intègrent un retour haptique pour transmettre des efforts à l’utilisateur et rendre les interactions avec l’environnement plus réelles. Les inter-faces haptiques couvrent plusieurs champs d'applications tels que la réalité virtuelle [GJBA05], les jeux vidéo [PKCP09], la conception assisté par ordinateur [TDP10a,
TDP10b] et la médecine [THH+11, Hen11]. Utilisateur Ecran Interface Haptique Environnement
manipulation retour visuel retour haptique
Figure 2.1 – Principe de fonctionnement des interfaces « maître » à retour haptique
Dans ce chapitre, nous commençons par présenter quelques interfaces «maître» utilisées en robotique médicale. Ensuite, nous étudions l'interface «maître» dévelop-pée dans ce travail sur la base d'un manipulateur sphérique parallèle (MSP). Nous détaillerons ses modèles géométriques et cinématiques. Enfin, nous évaluerons le dis-positif «maître» réalisé dans le cadre des travaux de thèse de Chaker [Cha12] et nous présenterons ses limitations.
2.2 Interface « maître »
L’architecture, les mobilités et les caractéristiques d'une interface « maître » changent selon le type de l’application visée. La plupart des interfaces utilisées dans
les systèmes de télé-opération pour la chirurgie mini-invasive possèdent soit une ar-chitecture sérielle, soit une arar-chitecture parallèle ou hybride.
La figure2.2montre deux interfaces « maître » ayant une architecture sérielle. Ces interfaces appartiennent au fameux système « Da Vinci » (Figure2.2a) et au système de télé-opération « Sofie » (Figure 2.2b). L’avantage de l’architecture sérielle est la simplicité de ses modèles géométriques et cinématiques. C'est le cas du modèle géo-métrique direct utilisé pour la commande en position du robot « esclave ». Cependant dans le cas des interfaces sérielles supportant un retour haptique, les moteurs sont installés sur les articulations. Dans ce cas, leur masse sera portée par l’utilisateur ce qui détériore la transparence de ce type d'interface. La transparence est un indice qui reflète l’aptitude de l’interface haptique à transmettre un effort désiré.
(a) Console « maître » pour le
ro-bot «Da vinci» (b) Interface haptique pour lerobot «Sofie»
Figure 2.2 – Interfaces « maîtres » à architectures sérielles
Concernant les interfaces à architecture parallèle, les moteurs sont installés sur la base. Ceci rend les interfaces plus « transparentes ». Par contre, leurs modèles géo-métriques directs sont souvent compliqués. La figure 2.3 montre quelques interfaces avec une architecture hybride à 6 d.d.l composée par une structure parallèle et un poignet sphérique. La structure parallèle se base sur l'architecture d’un robot delta assurant trois degrés de liberté de translation.
(a) Sigma 7 (b) Omega 7 (c) Delta 6
Figure 2.3 – Interfaces « maîtres » à architectures hybrides
Les interfaces « maîtres » présentées dans les figures 2.2 et 2.3 sont développées pour des systèmes de télé-opération spécifiques. Cependant, il y a des robots chirurgi-caux développés sans interface « maître ». Ces robots sont contrôlés par des interfaces à usage général telles que l’interface Phantom® Premium (Figure 2.4). Phantom®
Premium est une interface commerciale développée pour un usage multidisciplinaire. Cette interface possède une architecture sérielle à six degrés de liberté composée d’un porteur à 3 d.d.l et d’un poignet sphérique. Uniquement, le porteur permet un retour d’effort.
Figure 2.4 – interface Phantom® Premium.
La chirurgie mini-invasive nécessite quatre degrés de liberté (trois rotations et une translation). Les mobilités des interfaces présentées dans les figures 2.3 et 2.4 sont différentes à la mobilité de la chirurgie mini-invasive. Les modèles géométriques de ces interfaces sont adaptés afin d’avoir seulement les degrés de liberté souhaitées.
L’architecture de l’interface haptique développée dans le cadre de la thèse de Cha-ker [Cha12] possède une architecture parallèle sphérique qui offre les mobilités néces-saires et est adaptée aux tâches de la chirurgie mini-invasive. Cette interface intègre le retour haptique. Les actionneurs sont placés sur la base pour une meilleure trans-parence de l’interface. Les modèles géométriques et cinématiques de cette interface sont décrits dans les paragraphes suivants.
2.3 Robot parallèle sphérique
L’interface « maître » du système de télé-opération developpé à l'institut Pôle Poitevin de Recherche pour l’Ingénieur en Mécanique, Matériaux et Énergétique (Pprime) possède une architecture parallèle sphérique. Cette architecture a été choi-sie afin d’assurer trois rotations autour d’un point fixe avec une bonne rigidité et une précision élevée. Plusieurs systèmes possédant une architecture parallèle sphé-rique ont été développés. Nous pouvons citer le robot « Agile Eye » développé à l’Université de Laval [GH94, GSPG96] (Figure 2.5a). Ce robot a été réalisé pour contrôler l’orientation d’une caméra. Un second système a été développé à l’Université de Notre Dame, USA [WS98] (Figure 2.5b). Il est constitué d'un poignet sphérique attaché à un bras sériel.
Le robot sphérique parallèle est un robot à 3 degrés de liberté de rotation (figure 2.6). Il est composé de trois jambes identiques reliant la base à la plateforme mobile. Chaque jambe est composée de trois liaisons pivots. Les axes de ces liaisons sont concourant en un point commun appelé « centre de rotation ». Afin d'assurer un retour haptique, une liaison sur chaque jambe est motorisée.
(a) (b)
Figure 2.5 – Robots à architecture parallèle sphérique.
Figure 2.6 – Robot parallèle sphérique.
Chaque jambe se compose de deux branches : une branche proximale et une branche distale. La représentation géométrique de chaque branche peut se réduire à un arc de cercle définit par son rayon et l’angle d’ouverture. Les angles de la branche proximale et de la branche distale sont notés α et β respectivement (figure 2.7).
CoR
B
Figure 2.7 – Paramètres géométriques de la jambe A.
Le paramètre géométrique de la plateforme mobile est l’angle entre l’axe ZE et
de la plateforme mobile est noté γ′. Les axes des liaisons actifs Z
1K forment un repère
orthogonal. Les variables angulaires actifs sont notées θ1A, θ1B et θ1C.
L’orientation de la plateforme mobile est définie par les angles d’Euler ψ, θ et φ (Figure 2.8). La matrice de passage du repère mobile lié à la plateforme au repère fixe lié à la base est définie dans l’équation suivante :
RE = RZ(ψ) · RX′(θ) · RZE(φ) (2.1)
*
Z
X
Y
Z
EX'
φ
ψ
θ
ψ
Figure 2.8 – Les angles d'Euler.
RE = cψ cφ− cθ sψ sφ −cψ sφ − cθ sψ cφ sθ sψ cψ sφ+ cθ cψ sφ −sψ sφ + cθ cψ cφ −sθ cψ sθ sφ sθ cφ cθ (2.2)
L’espace de travail utile défini dans le chapitre 1est décrit dans le repère cartésien par un cône de demi-angle de sommet α1, égal à 26°. Cet espace de travail peut être
définit à l’aide des angles d’Euler (ψ, θ) en décrivant le vecteur ZE comme suit :
ZE = sθ sψ −sθ cψ cθ (2.3)
Nous définissons le vecteur unitaire V représentant l'axe du cône, comme suit : V = √1 3 1 1 1 (2.4)
La frontière de l’espace de travail est donc décrite par l’expression suivante :
Que nous pouvons développer comme suit :
(sinψ − cosψ)sinθ + cosθ = √3cos(α1) (2.6)
Cette équation définit la frontière de l’espace de travail dans le plan (ψ, θ). Cette frontière est présentée dans la figure suivante :
20 40 60 80 θ(° ) ψ(°) 100 120 140 160
Figure 2.9 – Frontière de l'espace de travail utile dans le plan (ψ, θ) pour α1=26°.
Le centre de l’espace de travail est donné par (ψ, θ) = (135°, 54.7°). Si φ=0°, alors cette configuration représente la configuration de référence du robot parallèle sphérique (Figure 2.10).
Z
Y X
Figure 2.10 – Configuration de référence définit par (ψ, θ, ϕ) = (135°, 54.7°, 0°).
Les modèles géométriques et cinématiques du robot parallèle sphérique sont décrits dans les paragraphes suivants.
2.4 Modèle géométrique
2.4.1 Modèle géométrique inverse
Le Modèle Géométrique Inverse (MGI) permet de calculer les angles actifs (θ1A,
(ψ, θ et φ). Pour résoudre leMGIdu robot parallèle sphérique, il suffit de développer la relation géométrique donnée dans l’équation (2.7) pour les jambes A, B et C.
Z2k· Z3k= cos(β) k = A, B et C (2.7) Avec, Z2k= R0k· RZ(θ1k) · RX(α) · Z (2.8) Z3k= RE · RZ( 2π 3 (i − 1)) · RX(γ) · Z ; i = 1, 2 et 3 (2.9) R0A= 1 0 0 0 1 0 0 0 1 R0B = 0 1 0 0 0 1 1 0 0 R0C = 0 0 1 1 0 0 0 1 0 (2.10)
En effet, en exprimant Z2k en fonction des angles actifs (θ1A, θ1B et θ1C) et Z3k en
fonction des angles d’Euler (ψ, θ et φ), nous obtenons les trois équations suivantes : Aicos(θ1A) + Bisin(θ1A) + Ci = 0 ; i = 1, 2 et 3 (2.11)
Où, Ai, Bi et Ci (i=1, 2, 3) sont des variables qui dépendent des paramètres
géométriques (α, β et γ) et de l’orientation de la plateforme mobile (ψ, θ et φ). Les expressions de ces paramètres sont détaillées dans l’annexe A.
Le système d’équations (2.11) admet des solutions si et seulement si les conditions suivantes sont valides :
C2 1 A2 1+ B12 ≤ 1 C2 2 A2 2+ B 2 2 ≤ 1 C2 3 A2 3+ B 2 3 ≤ 1 (2.12)
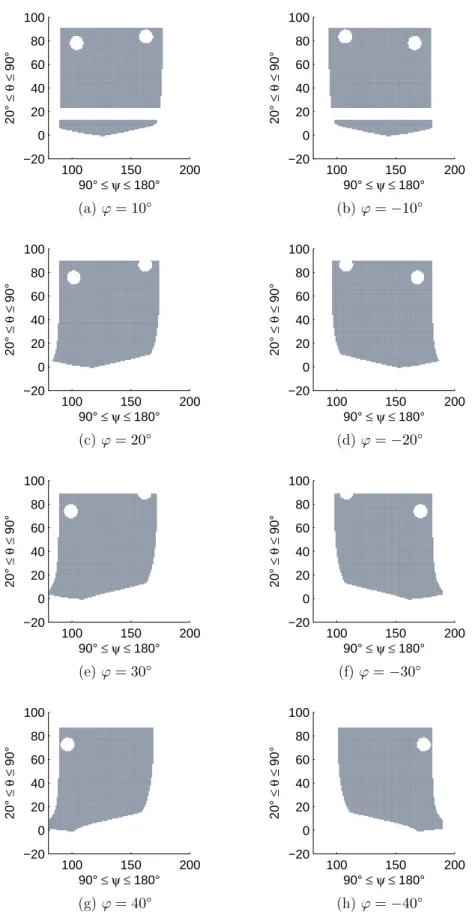
Ces conditions permettent la détermination de l’espace de travail du robot parallèle sphérique. La figure 2.11 illustre l’espace de travail du RPS dans le plan (ψ,θ) à des différentes valeurs de la rotation propre φ.
100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (a) ϕ = 10° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (b) ϕ = −10° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (c) ϕ = 20° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (d) ϕ = −20° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (e) ϕ = 30° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (f) ϕ = −30° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (g) ϕ = 40° 100 150 200 −20 0 20 40 60 80 100 90° ≤ψ≤ 180° 20° ≤ θ ≤ 90° (h) ϕ = −40°
Figure 2.11 – Espace de travail dans le plan (ψ,θ) en fonction de la rotation propre ϕ.
par x et y respectivement, nous obtenons des équations de droites dans le plan (x, y). Les solutions de ces équations (2.11) sont les intersections entre les droites et le cercle trigonométrique de rayon égal à 1. Chaque équation du système (2.11) possède deux solutions (figure 2.12).
-1
-0.5
-0.5
-1
θ1 θ2Figure 2.12 – Représentation géométrique de deux solutions.
Les solutions sont les suivantes : θ1A = { atan2(y1 1, x 1 1) atan2(y2 1, x 2 1) θ1B = { atan2(y1 2, x 1 2) atan2(y2 2, x 2 2) θ1C = { atan2(y1 3, x 1 3) atan2(y2 3, x 2 3) (2.13) Où, xj i, y j
i (i=1..3 ; j=1,2) sont des variables qui dépendent de Ai, Bi et Ci. Ses
expressions sont détaillées dans l'annexe A.
Le modèle géométrique inverse du robot sphérique parallèle possède huit solutions possibles obtenues par la combinaison des solutions des angles (θ1A, θ1B et θ1C). Ces
solutions sont appelées « modes de fonctionnement ». La figure 2.13 montre les huit modes de fonctionnement pour l'orientation donné par (ψ, θ, φ) = (135°, 54°, 0°).
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 2.13 – Solutions du modèle géométrique inverse pour l'orientation (ψ, θ, ϕ) = (135°, 54°, 0°).
Le MGI détermine les variables articulaires actives pour une orientation donnée de la plateforme mobile. Dans la plupart des cas, nous faisons appel au MGI pour le contrôle en position des robots parallèles ou sérielles. Dans notre cas, le MGI est utilisé dans les processus d’optimisation du robot parallèle sphérique (RPS). Il est également très utile pour le calibrage des capteurs absolus du RPS et dans la procé-dure d’évaluation du modèle géométrique direct (MGD) du RPS. Dans le paragraphe suivant, nous présentons le modèle géométrique direct du robot parallèle sphérique.