Timing Requirement Description Diagrams for Real-Time System Verification
Texte intégral
Figure
![Table 3 presents temporal requirements corresponding to the bounded promptness properties defined in [1]](https://thumb-eu.123doks.com/thumbv2/123doknet/12467934.337566/6.892.473.825.500.794/presents-temporal-requirements-corresponding-bounded-promptness-properties-defined.webp)
Documents relatifs
Once having reached a consistent system state in which all verification and validation (V&V) activities have been performed, changes can become ex- tremely expensive since
Events enriched in D ∗+ candidates originating from the primary vertex are selected by the hardware trigger by imposing that either one or more D 0 decay products are consistent
Les réseaux sociaux d’entreprise sont actuellement massivement utilisés pour pro- mouvoir ce type d’apprentissage.. Ils intègrent sur une même plateforme la gestion de
A first analysis of the instantaneous images (figure 10) indicates that the structure of the film near the injector exit remains still present beyond this zone
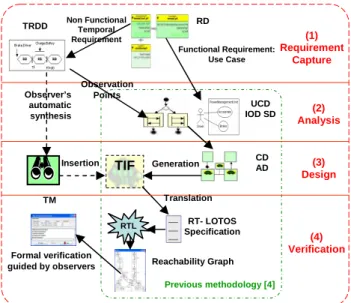
To assess the time property patterns by model checking, the common formal methods used rely on a translation of the user models into a formal verifiable language and express
To do so, we define a formal model for the semantics of timed choreographies and propose a model-based approach for checking complex real-time requirements, which extends our
L’évolution de la technologie permettra demain des actions impossibles aujourd’hui : de la vidéo plein écran de parfaite qualité, des formats de bannières toujours plus
Three complementary verification techniques are used to verify interoperability requirements in a collaborative process model.. The verification technique used depends on the aspect
