Photogrammétrie appliquée aux mesures de vitesses et distances dans le
domaine maritime avec des appareils photo calibrés hors ligne
Mémoire
Philippe Richard
Maîtrise en génie des eaux
Maître ès sciences (M. Sc.)
Photogrammétrie appliquée aux mesures de vitesses et distances
dans le domaine maritime avec des appareils photo calibrés hors ligne
Mémoire
Philippe Richard
Sous la direction de :
Résumé
Ce présent travail a comme objectif d’explorer la faisabilité technique d’utiliser une méthode photogrammétrique pour mesurer la vitesse et la distance d’un objet déplaçant sur une surface plane à l’aide de deux photos prises à intervalle de temps connu. En connaissant préalablement la géométrie et les dimensions de la cible et les paramètres intrinsèques de l’appareil photo, il est possible de déterminer les six degrés de liberté du mouvement de la cible pour chacune des prises. En connaissant les positions relatives de chacune des cibles, il devient facile de mesurer la distance parcourue pendant l’intervalle de temps. Cette technique de mesure de la vitesse et de la distance servirait éventuellement à mettre en application l’article 2(7) du Règlement visant la restriction des bâtiments. Cet article stipule une limitation de vitesse à 10 km/h à l’intérieur de la zone de trente mètres des rives. Premièrement, ce travail consiste à vérifier la précision de localiser une cible sur une surface. Deuxièmement, ce projet étudie des modèles d’erreur permettant de prédire les incertitudes des mesures de distance. Finalement, ce travail examine l’ensemble des variables et des paramètres appliqués à cette méthode dans l’établissement d’une mesure de vitesse et de distance de la cible.
iv
Table des matières
Résumé ... iii
Table des matières ... iv
Liste des figures ... vii
1 Introduction ... 1
2 Mise en contexte ... 2
2.1
Situation au Québec ... 2
2.2
Cadre Juridique ... 2
2.3
Mise en œuvre de l’Article 2 (7) ... 3
3 Proposition de recherche ... 4
3.1
Objectifs ... 4
3.2
Hypothèses ... 5
4 Théorie ... 6
4.1
Schéma et équations fondamentales ... 6
4.2
Modèle du sténopé ... 7
4.2.1
Paramètres intrinsèques de l’appareil photo ... 7
4.2.2
Cibles ... 8
4.2.3
Variables photo ... 9
4.2.4
Représentation mathématique du modèle ... 9
4.3
Méthodes de résolution ... 11
4.3.1
Méthode de Newton ... 11
4.3.2
Méthode de Gauss-‐Newton ... 12
4.4
Vérification des hypothèses ... 13
5 Méthodologie ... 14
5.1Banc d’essai 1 ... 14
5.1.1
Objectifs ... 14
5.1.2
Matériels ... 15
5.1.3
Protocole ... 16
5.2
Banc d’essai 2 ... 17
5.2.1
Objectifs ... 17
5.2.2
Matériels ... 18
5.2.3
Protocole ... 19
6 Résultats ... 20
6.1Banc d’essai 1 ... 20
6.2
Banc d’essai 2 ... 24
6.2.1
Série 1 ... 24
6.2.2
Série 2 ... 27
6.2.3
Série 3 ... 29
6.2.4
Série 4 ... 31
7 Discussions ... 34
7.1Banc d’essai 1 ... 34
7.1.1
Modèle de résolution ... 34
7.1.2
Erreurs sur la direction ... 37
7.2
Banc d’essai 2 ... 38
7.2.1
Calcul d’erreur de la distance entre les cibles ... 38
7.2.2
Paramètres adimensionnels ... 41
7.3
Sources d’erreurs ... 55
7.3.1
Déformation optique et aberration chromatique ... 55
7.3.2
Composantes du capteur numérique ... 56
7.3.3
Résolution minimale ... 58
7.4
Banc d’essai 3 ... 59
7.4.1
Lumière disponible ... 59
7.4.2
Vitesse relative de la cible ... 60
7.5
Synthèse des paramètres et des variables ... 61
Conclusions ... 63
8 Réflexions ... 64
9 Recommandations ... 66
10 Bibliographie ... 67
12 Annexe ... 68
12.1
Annexe A : Modèle du Sténopé simplifié & Jacobien ... 68
12.2
Annexe B : Procédure banc d’essai 1 ... 80
12.3
Annexe C : Tableaux des données pour le banc d’essai 1 ... 81
12.4
Annexe D : Tableaux des résultats pour le banc d’essai 1 ... 84
12.5
Annexe E : Procédure banc d’essai 2 ... 87
vi
Liste des tableaux
Tableau 1 : Caractéristiques des appareils photo utilisé ... 13
Tableau 2 : Combinaison des configurations de cible possible pour la série 1 ... 25
Tableau 3 : Combinaison des configurations de cible possible pour la série 2 ... 27
Tableau 4 : Combinaison des configurations de cible possible pour la série 3 ... 30
Tableau 5 : Combinaison des configurations de cible possible pour la série 4 ... 32
Tableau 6 : Erreur absolue moyenne pour les cinq modèles ... 35
Tableau 7 : Résultats pour les bornes d'erreurs pour les 4 séries ... 39
Tableau 8 : Résumé des critères de performances pour les paramètres adimensionnels ... 49
Tableau 9 : Caractéristiques de l’appareil photo de la série témoin ... 52
Tableau 10 : Intensités lumineuses pour différentes scènes. ... 59
Liste des figures
Figure 1 : Schéma aérien des variables fondamentales ... 6
Figure 2 : Modèle du sténopé ... 7
Figure 3 : Paramètres intrinsèques de l’appareil photo ... 7
Figure 4 : Cible banc d'essai 1 ... 8
Figure 5 : Cibles banc d'essai 2 ... 8
Figure 6 : Exemple des coordonnées des points contours de la cible ... 9
Figure 7 : Disposition du banc d'essai 1 ... 14
Figure 8 : Repères visuels pour le banc d'essai 1 ... 15
Figure 9 : Disposition du banc d'essai 2 ... 17
Figure 10 : Comparaison des coordonnées de la station totale et du modèle du sténopé ... 20
Figure 11 : Évolution de l'erreur absolue de la distance de la cible en fonction de la distance réelle de la cible ... 21
Figure 12 : Évolution de l'erreur de la direction en fonction de la distance réelle de la cible ... 22
Figure 13 : Écarts des coordonnées entre la station totale et le modèle du sténopé ... 23
Figure 14 : Dispositif de la série 1 ... 24
Figure 15 : Histogramme des erreurs relatives pour la série 1 ... 25
Figure 16 : Évolution de l’erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 1 ... 26
Figure 17 : Dispositif de la série 2 ... 27
Figure 18 : Histogramme des erreurs relatives pour la série 2 ... 28
Figure 19 : Évolution de l'erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 2 ... 28
Figure 20 : Dispositif de la série 3 ... 29
Figure 21 : Histogramme des erreurs relatives pour la série 3 ... 30
Figure 22 : Évolution de l'erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 3 ... 31
Figure 23 : Dispositif de la série 4 ... 32
Figure 24 : Histogramme des erreurs relatives pour la série 4 ... 33
Figure 25 : Évolution de l'erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 4 ... 33
Figure 26 : Évolution de l'erreur absolue de la distance de la cible pour cinq modèles itératifs ... 34
Figure 27 : Évolution des écarts maximaux entre les cinq modèles en fonction de la distance d'observation .. 36
Figure 28 : Évolution de l'erreur relative en fonction de la distance réelle d’observation et de l'erreur quadratique moyenne pour le banc d'essai 1 ... 36
Figure 29 : Agrandi de la photo 9866 du premier banc d'essai ... 37
Figure 30 : Évolution des bornes établies par le calcul d'erreur en fonction du numéro de l'essai ... 39
Figure 31 : Comparaison des erreurs relatives et réelles et modélisées ... 40
Figure 32 : Critères de performance ... 41
Figure 33 : Évolution de l'erreur relative en fonction du paramètre R pour les quatre séries ... 47
Figure 34 : Évolution de l'erreur relative en fonction du paramètre P pour les quatre série ... 48
viii
Figure 37 : Évolution de l'erreur relative en fonction des paramètres R et S pour l'ensemble des séries ... 50
Figure 38 : Répartition des paramètres R et S en fonction de la série ... 50
Figure 39 : Évolution de l'erreur relative en fonction des paramètres R et S pour l'ensemble des séries ... 51
Figure 40 : Évolution de l'erreur relative en fonction des paramètres R et S pour la série témoin ... 52
Figure 41 : Dispositif de la série témoin ... 53
Figure 42 : Procédure de recherche de paramètres adimensionnels et fonction de marge d'erreur ... 54
Figure 43 : Distorsion optique ... 55
Figure 44 : Aberrations chromatiques ... 55
Figure 45 : Composantes du capteur numérique, tirée du site web : La photo en faits ... 56
Figure 46 : Effet de crénelage, tirée du site web : La photo en faits ... 56
Figure 47 : Fonction des photosites, tirée du site web : La photo en faits ... 57
Figure 48 : Matrice de Bayer, tirée du site web : La photo en faits ... 57
Figure 49 : Exemple de dématriçage, tirée du site web : La photo en faits ... 57
Figure 50 : Quatre images génériques d'une plaque d'immatriculation ... 58
Figure 51 : Déplacement incrémenté de la cible pendant le temps d'exposition ... 60
1 Introduction
La problématique reliée aux embarcations à moteur n’est pas nouvelle. En effet, depuis de nombreuses années, plusieurs articles de journaux nous rappellent les grands principes de la sécurité nautique sur les plans d’eau. L’achalandage des embarcations à moteurs occasionne également des complications au point de vue de la sécurité nautique avec les autres usagers récréatifs, comme les canotiers et les kayakistes. Dans une autre mesure, les impacts des embarcations à moteur se manifestent sur la qualité de l’eau et la détérioration des berges pour plusieurs plans d’eau québécois, notamment des lacs et des rivières servant à l’alimentation en eau potable. À cet effet, en 2012, dans le cadre de la stratégie de protection et de conservation des sources destinées à l’alimentation en eau potable, le MDDEFP, le Ministère du Développement durable, de l’Environnement, de la Faune et des Parcs, s’est questionné sur ces impacts par rapport à la qualité de l’eau des sources d’eau potable. Les objectifs encourus par le ministère étaient de proposer un modèle ou des modèles de règlements permettant d’atténuer les impacts des embarcations. L’objectif de ce travail de maîtrise est d’explorer un moyen alternatif pour faire appliquer et respecter l’article 2 (7) du Règlement visant la restriction des bâtiments.
2
2 Mise en contexte
2.1 Situation au Québec
Pour l’ensemble du territoire québécois en 2012, on dénombrait 282 prises d’eau municipales de surface servant à l’alimentation en eau potable pour des réseaux desservant plus de 500 personnes. De ce nombre, 92 prises d’eau se retrouvent dans des lacs, 161 dans les rivières et 29 s’alimentent dans le fleuve Saint-Laurent. Au total, ce sont près de 5,8 millions de personnes qui sont desservies par les eaux de surface au Québec. D’un point de vue des impacts des embarcations à moteur sur la qualité de l’eau, 28 prises d’eau sont plus vulnérables en raison de leurs faibles profondeurs, soit inférieures à quatre mètres, et 88 prises d’eau se retrouvent dans des plans d’eau ayant une superficie inférieure à un kilomètre carré. Conséquemment, dans le but de préserver la qualité de l’eau des sources, il s’avérait nécessaire de proposer des mesures de protection et de conservation incluant un ou des modèles de règlementation limitant les activités des embarcations à moteurs sur les plans d’eau ayant une prise d’eau municipale.
2.2 Cadre Juridique
En vertu de l’article 91,10 de la Loi constitutionnelle de 1867 qui stipule la distribution des pouvoirs législatifs, la navigation et les bâtiments ou navires relèvent de la compétence fédérale. En effet, les pouvoirs encadrant les activités nautiques s’inscrivent dans la Loi de 2001 sur la marine marchande. Plus précisément, c’est le Règlement sur la restriction visant l’utilisation des bâtiments qui spécifie les activités permises et interdites des embarcations de plaisance dans les eaux intérieures canadiennes. Ce règlement comporte 21 articles et 9 annexes. Les annexes de ce règlement encadrent les activités nautiques qui sont proscrites sur un plan d’eau en particulier. Les activités sanctionnées vont de l’interdiction complète ou partielle des embarcations à propulsion mécanique ou électrique sur les cours d’eau et les lacs, ainsi qu’une limitation de vitesse des embarcations de moteur. Conséquemment, en vertu des lois et des règlements existants, le modèle de règlements permettant d’atténuer les impacts des embarcations à moteur devrait nécessairement s’inscrire dans le Règlement sur la restriction visant l’utilisation des bâtiments. Contenu de la grande diversité des plans d’eau servant à l’alimentation en eau potable, il serait souhaitable de légiférer en fonction de chaque plan d’eau. Toutefois, en raison des délais administratifs qui sont de l’ordre de 2 à 5 ans pour chaque plan d’eau, cette avenue est totalement déraisonnable en termes de temps de mise en œuvre.
À défaut d’utiliser un modèle de règlements spécifiques pour chaque plan d’eau, l’article 2 (7) du Règlement fédéral visant l’utilisation des bâtiments s’avère une avenue très intéressante à explorer. Cet article prévoit une limitation de la vitesse à 10 km/h à l’intérieur de 30 mètres des rives pour l’ensemble des eaux en Ontario, au Manitoba, en Saskatchewan, en Alberta, en Colombie-Britannique et ainsi qu’en Nouvelle-Écosse. Cette disposition a deux objectifs : le premier étant d’assurer la sécurité des usagers qui naviguent en bordure des rives et le deuxième de limiter et prévenir l’érosion des berges dues aux batillages des embarcations à moteur. Comme le Québec ne s’est pas prévalu de cette disposition, il serait peu couteux de faire souscrire la province à cette disposition permettant ainsi une protection de base contre les impacts des embarcations à moteur.
2.3 Mise en œuvre de l’Article 2 (7)
D’un point de vue des ressources techniques, la mise en œuvre de l’article 2 (7) nécessite l’utilisation de cinémomètre pour mesurer la vitesse et l’implantation de bouées permettant de faire la délimitation de zone restrictive de 30 mètres le long des berges. L’utilisation d’un cinémomètre est limitative sur un plan d’eau en raison de la trajectoire inconnue des embarcations. En effet, sur un lac ou une rivière, une embarcation a la liberté de se mouvoir selon deux degrés de liberté, donc conséquemment, il devient laborieux de mesurer avec précision la vitesse de cette dernière en raison de l’angle inconnu de la trajectoire. L’implantation des bouées est a priori compliquée et laborieuse d’un point de vue des coûts et de la logistique. Il est pratiquement inconcevable de munir tous les plans d’eau québécois de bouées pour circonscrire la zone de 30 mètres. D’un point de vue des ressources humaines, au niveau de la Sureté du Québec en 2015, on recensait 317 agents formés qui surveillaient plus ou moins 500 plans d’eau à travers le Québec. Le type de surveillance est essentiellement ponctuel ou sur plainte, seules trois équipes ou l’équivalent de trente patrouilleurs font de la surveillance de façon continue. De façon pratique, la mise en œuvre de l’article 2 (7) est irréalisable dans le cadre technique actuel. Les ressources humaines sont manquantes pour assurer le respect de cette disposition.
4
3 Proposition de recherche
La proposition de recherche dans le cadre de ce mémoire de maîtrise est d’explorer une façon alternative de faire respecter l’article 2 (7) du Règlement fédéral visant l’utilisation des bâtiments grâce aux mesures faites à partir de la photogrammétrie. À partir de deux photos prises à un intervalle connu et à l’aide d’un objet de taille et de géométrie connues, il devient possible grâce à un calibrage hors ligne de déterminer les six degrés de libertés des cibles pour chacune des photos et ainsi calculer la distance qui les sépare.
3.1 Objectifs
Les objectifs de ce mémoire de maîtrise sont d’explorer une façon alternative simple de faire respecter l’article 2 (7) de ce règlement grâce à une méthodologie exploitant les appareils photo de type réflex que l’on retrouve sur le marché. Plus spécifiquement, les objectifs sont;
1) Élaborer un modèle mathématique modélisant les six degrés de liberté d’une cible à partir des cinq paramètres intrinsèques de l’appareil photo.
2) Trouver un algorithme fiable permettant de déterminer les six degrés de liberté de la cible.
3) Déterminer un modèle d’erreur permettant de prédire et circonscrire les erreurs de distances entre les cibles.
3.2 Hypothèses
Les hypothèses dans le cadre de ce projet sont nombreuses et essentielles. Le but de ces hypothèses est de démontrer qu’il est possible de déterminer la vitesse et la distance d’un objet avec deux photos subséquentes à intervalle de temps de connu sans préalablement avoir fait un calibrage du modèle du sténopé. L’approche proposée exploitera des appareils photo calibrés hors ligne. C’est à dire en considérant uniquement les paramètres intrinsèques de l’appareil photo et les propriétés extrinsèques de la cible. De plus façon plus spécifique, les hypothèses rattachées à ce projet sont;
1) Le modèle du sténopé est suffisant et approprié pour estimer les six degrés de liberté de la cible 2) Les cinq paramètres intrinsèques de l’appareil photo donnés par le fabricant et les fichiers Exif sont
justes et suffisamment précis.
3) Les déformations optiques et les aberrations chromatiques peuvent être négligées dans le modèle. 4) Les pixels des photos sont carrés.
5) La dimension et la géométrie de la cible sont connues de l’observateur. 6) Le cadrage est le même entre les deux photos.
6
4 Théorie
4.1 Schéma et équations fondamentales
Sur un plan d’eau ou sur la route, la vitesse d’une cible se définit toujours avec les mêmes équations fondamentales. C’est-à-dire avec un ratio entre la distance parcourue et le temps de parcours. Sur un lac ou une rivière, la distance est franchie dans le plan. La figure 1 illustre les variables fondamentales de ce projet.
Figure 1 : Schéma aérien des variables fondamentales
La figure 1 affiche l’ensemble des variables servant aux calculs de la vitesse et de la distance des embarcations sur un plan d’eau. Ces variables sont respectivement les coordonnées connues d’un observateur et d’un repère visuel et les coordonnées inconnues d’une embarcation à deux temps différents. Les coordonnées de l’observateur et du repère visuel peuvent être facilement estimées à partir d’un appareil photo muni d’un GPS ou encore par l’imagerie satellitaire fournie par Google Earth. Ce choix se justifie par l’accessibilité des instruments de mesure pour le grand public. Les coordonnées de l’embarcation peuvent être déduites à l’aide d’un appareil photo et d’une cible de géométrie et de taille connues qui accompagne l’embarcation. Par cette approche, il devient possible d’établir les coordonnées de l’embarcation en connaissant la distance de cette dernière avec l’observateur. Cette méthode a comme avantage de faire un contrôle terrestre des embarcations à moteurs. La méthode se compare à une version tridimensionnelle du théorème des triangles semblables. D’un point de vue mathématique, la vitesse instantanée de l’objet s’obtient directement par un ratio infinitésimal entre un vecteur de distance parcourue, r, et une différence de temps, voir l’équation 1. Le vecteur distance parcouru peut être défini à partir des différences de translation selon les trois axes, voir l’équation 2. Ces différences de translation sont également définies à partir de coordonnées relatives de la cible au temps 1 et au temps 2, voir l’équation 3.
! =!! !" Eq 1 ! = ∆!"!+ ∆!"!+ ∆!"! Eq 2 Δ!" = !"1 − !"2 , Δ!" = !"1 − !"2 , Δ!" = !"1 − !"2 Eq 3
4.2 Modèle du sténopé
Le modèle du sténopé modélise l’image d’une caméra par une projection perspective. Ce dernier transforme les coordonnées tridimensionnelles d’un point réel vers un point sur un plan image grâce à la matrice caméra. Illustré à la figure 2, le modèle du sténopé fait l’hypothèse que tous les rayons lumineux transitent un seuil point nommé centre optique pour former une image sur un plan à l’arrière de ce point.
Figure 2 : Modèle du sténopé
La figure 2 schématise tous les paramètres du modèle du sténopé exprimé dans sa plus simple expression. Un point P aux coordonnées tridimensionnelles, Xe, Ye, Ze se transpose grâce à la matrice caméra à un point p’ aux coordonnées bidimensionnelles, xi et yi. Dans le cadre de ce projet, le modèle du sténopé se limitera à cinq paramètres intrinsèques qui caractériseront l’appareil photo. Ce choix se justifie par l’accessibilité de ces paramètres dans les données Exif des photos prises.
4.2.1 Paramètres intrinsèques de l’appareil photo
Tous les appareils photo, quels qu’ils soient, sont toujours munis des mêmes composantes, soit un boitier et un objectif. Le boitier comprend le capteur numérique qui capte et enregistre l’information et la lentille gère la lumière des scènes photographiées. Ce sont les caractéristiques de ces composantes qui définissent les cinq paramètres intrinsèques de la caméra. La figure 3 montre les cinq paramètres utilisés pour ce projet.
Figure 3 : Paramètres intrinsèques de l’appareil photo
La figure 3 présente les cinq paramètres intrinsèques minimaux à prendre en considération dans le modèle du sténopé. Le capteur numérique se caractérise par quatre paramètres, soit ces dimensions physiques, Lc, Hc exprimées en millimètre et ces dimensions pixellisées Lp, Hp exprimées en pixel. L’objectif comprend
8
4.2.2 Cibles
Les cibles sont les éléments clés de ce projet. En connaissant préalablement leurs tailles et leurs géométries, il devient possible de faire un calibrage hors ligne des appareils photo utilisés lors des essais. Dans le cadre de ce projet, deux cibles rectangulaires de tailles différentes seront utilisées. La première cible, montrée à la figure 4, est utilisée dans le premier banc d’essai. Cette dernière a une longueur L de 50 cm et une hauteur H de 15 cm. Cette cible est montée et disposée sur un trépied de manière à permettre tous les degrés de liberté
du mouvement. La seconde cible, montrée à la
figure 5, est utilisée dans le second banc d’essai. Cette dernière a une longueur de 10 cm et une hauteur de 3 cm, soit l’équivalent du 1/5 de la cible utilisée lors du premier banc d’essai. Cette cible est montée sur mât de 15 cm munis d’une base carrée de 8 cm qui permet cinq degrés de liberté, soit toutes les translations et deux rotations. Seule la rotation autour de l’axe des X n’est pas représentée avec la seconde cible.
Figure 4 : Cible banc d'essai 1
10
4.2.3 Variables photo
Les variables photo sont les coordonnées pixellisées des points saillants de chacune des cibles. Ces coordonnées ont été prises manuellement à partir d’une différence de contraste à l’aide du logiciel ImageJ. La figure 6 présente un exemple des points contours de la cible.
Figure 6 : Exemple des coordonnées des points contours de la cible
La figure 6 montre un exemple des variables photo. À l’aide du logiciel ImageJ les 4 points saillants de chacune des cibles sont préalablement définis, ensuite répertoriés sous forme de tableau dans Excel. Le point 3* correspond au point de référence dans le système d’équations, c’est-à-dire le point qui est influencé uniquement par les translations du modèle.
4.2.4 Représentation mathématique du modèle
La représentation mathématique du modèle est essentielle pour établir le système d’équations permettant de déterminer les degrés de liberté des cibles. Dans le cadre de ce projet, tous les degrés de liberté associés au mouvement des cibles seront considérés dans la représentation mathématique du modèle, c’est-à-dire, les translations et les rotations selon les trois axes. Mathématiquement, l’équation 4 modélise toutes les transformations rigides d’une cible dans l’espace.
!!"#$% = !!"#!!!,!,! + !!,!,!
Eq 4
L’équation 4 présente la relation entre les six degrés de liberté et les coordonnées tridimensionnelles de la cible vis-à-vis d’un observateur. Les degrés de liberté sont les translations, T et les rotations, R, selon les trois axes. Les angles autours des axes X, Y, Z sont représentés respectivement par θ, Φ, α. Les coordonnées relatives des points contours de la cible sont données par l’équation 5.
!!"#= −! 0 −! 0 0 −! 0 0 0 −! 0 0 Eq 5
L’équation 5 présente la matrice des coordonnées relatives des points contours de la cible vis-à-vis le troisième point. Le troisième point sert de référence, ce dernier correspond à l’origine dans la matrice des
points saillants de la cible. La transition des coordonnées tridimensionnelles vers les points-images s’effectue à partir de l’équation 6. ! !, ! = ! !!" + !" 2 , ! !!" + !" 2 Eq 6
Par le principe des triangles semblables, soit le théorème de Thalès, il est possible de transposer les coordonnées tridimensionnelles de la cible vers des points-images. Cette transformation s’effectue à l’aide de la matrice caméra et d’un équivalent pixellisé de la focale utilisée, voir l’équation 7. Les demi-longueurs des grandeurs pixellisées, Lp/2 et Hp/2 dans les coordonnées images sont nécessaire pour se référer au centre optique. Cet ajout fait l’hypothèse que le centre optique correspond au centre de l’image.
!" = ! !"!+ !"! !"!+ !"! ≅ !
!" !" Eq 7
La focale équivalente en pixel estimée à l’équation 7 permet de faire la transition entre les grandeurs réelles et pixélisées de l’appareil photo. Avec l’hypothèse des pixels carrés, la focale équivalente devient le facteur d’échelle permettant de formuler adéquatement le système de huit équations présentées ci-dessous.
!!→ !!− !! !!!" + !" 2 !!→ !!− !! !!!" + !" 2 ⋮ !!→ !!− !! !!!" + !" 2 Eq 8
Le système de huit équations présenté à l’équation 8 exprime la différence entre les coordonnées modélisées et les coordonnées réelles des quatre points contours de la cible. La solution du système permettant de trouver les six degrés de liberté est atteinte lorsque l’ensemble des équations tend vers une valeur proche de zéro. Au total, compte tenu des huit équations et des six degrés de liberté, il y a cinq approches différentes qui permettent de résoudre ce système. Quatre approches impliquant trois points sur la cible s’appuient sur la méthode de Newton. L’unique solution impliquant quatre points sur la cible utilise la méthode d’optimisation de Gauss-Newton. Les détails des calculs permettant de résoudre le système d’équation est présenté à l’annexe A.
12
4.3 Méthodes de résolution
4.3.1 Méthode de Newton
La méthode de résolution de Newton est utilisée lorsqu’il y a seulement trois points disponibles sur la cible. Pondérée avec un facteur de relaxation d’un quart, cette méthode converge normalement vers une solution idéale sans résidus après 60 itérations. Concrètement, la méthode de résolution de Newton se formalise comme le présente l’algorithme 1.
1) Conditions initiales !!= 1,1,1,0,0,0 2) Vecteur incrément ! = −!×!!! Où ! = !!, !!, ⋯ , !! ! = !!! !!! ⋯ !" !!! ⋮ ⋱ ⋮ !!! !!! ⋯ !" !!! 3) Nouveau vecteur !!!!= !!+ ! 4 4) Condition d’arrêt
Si ! < ! alors arrête, sinon continue Où ! = !!!− !"!! ! !!! C : Condition d’arrêt 5) Fin
Algorithme 1 : Méthode de Newton
L’algorithme 1 montre l’algorithme de Newton permettant de résoudre l’une des quatre méthodes de solution à trois points. Les conditions initiales des degrés de liberté, D0, sont respectivement d’un mètre pour les trois translations et de zéro degré pour les trois rotations. Le nouveau vecteur, Di+1, correspond à la somme du vecteur précédent avec le vecteur incrément pondéré par facteur de relaxation d’un quart. Ce facteur de relaxation est essentiel pour assurer la convergence du système. Le critère d’arrêt est fixé par défaut à 60 itérations. À l’étape 4, les variables xi, pxi représentent respectivement les points réelles et modélisés des quatre points saillants de la cible.
4.3.2 Méthode de Gauss-Newton
La méthode d’optimisation de Gauss-Newton est utilisée pour résoudre l’unique système à quatre points présents sur la cible. Comme la méthode de Newton, la méthode Gauss-Newton converge normalement avec un facteur de relaxation d’un quart. Cette méthode permet de minimiser les résidus et ainsi de trouver une solution optimale au système de huit équations. Normalement, la solution converge après 50 itérations. Concrètement, la méthode de résolution se formalise comme le présente l’algorithme 2.
1) Conditions initiales !!= 1,1,1,0,0,0 2) Vecteur incrément ! = −!× !!! !!!! Où ! = !!, !!, ⋯ , !! ! = !!! !!! ⋯ !" !!! ⋮ ⋱ ⋮ !!! !!! ⋯ !" !!! 3) Nouveau vecteur !!!!= !!+ ! 4 4) Condition d’arrêt
Si ! < ! alors arrête sinon continue Où ! = !!!− !"!! ! !!! C : Condition d’arrêt 5) Fin
Algorithme 2 : Méthode de Gauss-Newton
L’algorithme 2 montre la méthode de Gauss - Newton permettant de résoudre l’unique méthode de solution à quatre points. Les conditions initiales des degrés de liberté, D0, sont les mêmes que la méthode de Newton. Elles sont respectivement d’un mètre pour les trois translations et de zéro degré pour les trois rotations. Le nouveau vecteur, Di+1, correspond à la somme du vecteur précédent avec le vecteur incrément pondéré par facteur de relaxation d’un quart. Ce facteur de relaxation est également essentiel pour assurer la convergence du système. Le critère d’arrêt pour sortir de la boucle itérative est fixé par défaut à 50 itérations. À l’étape 4,
14
4.4 Vérification des hypothèses
La quatrième hypothèse émise dans ce projet propose que les pixels des capteurs numériques des appareils photo utilisés soient carrés. Au total, lors des essais, trois appareils photo sont utilisés; soient un Canon EOS 40D, un Canon EOS 50D et un Pentax Ist Ds. Le tableau 1 présente les caractéristiques des quatre paramètres intrinsèques des capteurs numériques des appareils photos utilisés.
Tableau 1 : Caractéristiques des appareils photo utilisé
Le tableau 1 présente les caractéristiques et les rapports de la taille des photosites selon x et y des trois capteurs numériques utilisés. Les capteurs des appareils photo de marque Canon offrent des pixels carrés et celui de marque de Pentax est à 99,9 % carrés. Par conséquent, l’hypothèse des pixels carrés est vérifiée.
!"#"$%&#'(%')*+(, !"-.-,/01,23,4 !"-.-,/01,534 6+-%"7,8(%,4( 9$,:;;< !!"! !!"! !#"$ =$,:;;< %&"' %&"' %$"( 9>,:>7< #''' &($! #))' =>,:>7< !$*! #%+' !))' ?&(.@*%'.-,:A>7< %)"% %$"% +") 6B.%.('%+,7,:;;< $"(%,-)# &"+(,-)# ("'%,-)# 6B.%.('%+,C,:;;< $"(%,-)# &"+(,-)# ("'!,-)# 7DC % % )"***
E>>"#+'@(,>B.%.
5 Méthodologie
Pour répondre adéquatement aux objectifs de ce projet, il sera nécessaire d’effectuer trois bancs d’essai distinctifs. Les deux premiers bancs seront faits avec des cibles statiques tandis que le dernier s’effectuera avec des cibles dynamiques. Tout d’abord, le banc d’essai 1 servira à vérifier la position d’une cible dans l’espace, soit la surface d’un terrain vague sans relief. Ce choix de terrain se justifie par la similitude avec un plan d’eau. Pour ce faire, les coordonnées de la cible issues du modèle seront comparées aux coordonnées prises en parallèle par une station totale. Le second banc d’essai vérifiera la précision des mesures de distances entre six cibles identiques. Ce banc d’essai s’effectuera à l’échelle 1/5 du premier d’essai. Le dernier banc d’essai testera la vitesse d’une cible.
5.1 Banc d’essai 1
5.1.1 Objectifs
Le banc d’essai 1 consiste à vérifier la précision de cette nouvelle méthodologie reliée au modèle du sténopé à déterminer la position d’une cible dans l’espace. Pour vérifier l’objectif de ce banc d’essai, il est nécessaire d’incorporer au modèle un paramètre permettant de faire la localisation relative des cibles sur le terrain. Grâce à un repère visuel inclus dans le champ de vision de la photo et dont les coordonnées sont connues, il devient possible de déterminer la position et la direction de la cible vis-à-vis d’un observateur. Pour vérifier et comparer les résultats obtenus à partir de ce modèle, il est nécessaire de prendre des mesures en parallèle avec une station totale. Concrètement, la disposition de ce premier banc d’essai est présentée à la figure 7.
Figure 7 : Disposition du banc d'essai 1
La figure 7 présente le dispositif du premier banc d’essai. Ce dernier se compose de quatre éléments, trois statiques et un mobile. Les composants statiques sont la station totale, le repère visuel et l’appareil photo (observateur). La cible est l’unique composant mobile de ce banc d’essai. La liste et les spécifications du matériel utilisé lors de ce banc d’essai figurent à la section 5.1.2
16
5.1.2 Matériels
• Station totale
Marque : Leica Flexline Modèle : TS O6 • Repère visuel (2)
Repère 1 : Poteau métallique voir figure 8
Xr, Yr, Zr à déterminer avec la station totale
Repère 2 : Pylône du terrain de baseball voir figure 8
Xr, Yr, Zr à déterminer avec la station totale • Observateur (appareil photo)
Boitier
Marque : Canon
Modèle : Canon EOS 40D
Objectif EF 28mm f/2.8 f = 28 mm Trépied Marque : Manfrotto • Cible
Surface rectangulaire de 50 par 15 cm L=50 cm, H=15 cm voir figure 4
5.1.3 Protocole
Le protocole de ce banc d’essai se compose de deux parties; soit la partie terrain et la partie traitement des données. La partie terrain regroupe toutes les étapes (12) permettant de recueillir des données. Huit étapes sont préliminaires aux quatre étapes de l’opération terrain. La partie traitement des données regroupe quatre étapes. Les détails de chacune de ces étapes figurent comme suit;
Partie 1 Terrain Étapes préliminaires
1. Disposer le trépied, l’appareil photo et la station totale sur un terrain vague et plat de grande superficie.
2. Orienter et ajuster l’appareil photo à l’aide du niveau à bulle de façon à obtenir l’horizon optique confondu à l’horizon réel.
3. Déterminer dans le champ vision de l’appareil photo deux repères visuels.
4. Mesurer la hauteur de la station totale par rapport au sol à l’aide d’un ruban à mesurer. 5. Mesurer la hauteur de l’appareil photo par rapport au sol à l’aide d’un ruban à mesurer. 6. Définir les coordonnées de l’appareil photo à l’aide de la station totale, (centre du trépied). 7. Définir les coordonnées des deux repères visuels à l’aide de la station totale, (centre du repère). 8. Utiliser une ouverture adaptée à la luminosité ambiante et mettre la mise au point en mode manuel
sur l’infini.
Opération terrain
1. Disposer de façon aléatoire la cible à l’intérieur du champ de vision couvert par l’appareil photo. 2. Prendre une photo de la cible à chaque déplacement de la cible.
3. Noter les coordonnées relatives de la cible à l’aide de la station totale. 4. Répéter les procédures 1 à 3 20 fois.
Partie 2 Traitement des données
1. Trouver les dimensions du capteur pour le boitier Canon 40D.
2. À l’aide du logiciel ImageJ, noter les points contours de la cible et le point de repère visuel.
3. Incorporer dans le modèle approprié tous les points images, toutes les coordonnées terrain et les paramètres intrinsèques de l’appareil photo et les deux dimensions de la cible (programmation vba). 4. Exécuter la procédure du banc d’essai 1.
18
5.2 Banc d’essai 2
5.2.1 Objectifs
Le banc d’essai 2 consiste à vérifier la précision du modèle du sténopé à déterminer la distance entre deux cibles sur une surface. Le modèle du sténopé sera utilisé à deux reprises de manière à trouver les coordonnées de chaque paire de cibles et ainsi déterminer la distance entre ces dernières. Dans le but d’optimiser le nombre de données recueillies, six cibles identiques de 10 cm de longueur et de 3 cm de hauteur seront utilisées lors de ce banc d’essai. Avec l’ensemble des combinaisons de paires de cibles, il sera possible de déterminer 15 mesures de distances différentes à partir d’une seule photo. Ce banc d’essai comprendra 4 séries de données qui seront prises avec le même boitier, mais avec deux objectifs différents et quatre dispositions de cibles différentes. Contrairement au premier d’essai, c’est l’observateur qui sera l’élément mobile entre chacune des photos. Concrètement, le dispositif du banc d’essai 2 est présenté à la figure 9.
Figure 9 : Disposition du banc d'essai 2
La figure 9 présente le second banc d’essai. Ce dernier comprend seulement deux composants soit; un observateur mobile et un groupe de six cibles. La liste et les spécifications du matériel utilisé lors de ce banc d’essai figurent à la section 5.2.2
5.2.2 Matériels
• Observateur (appareil photo)
Boitier
Marque : Canon
Modèle : Canon EOS 50D
Objectif (2)
Objectif 1 : Séries 1 et 2 EF-S 17-55mm f/2.8 IS USM f = 17 mm
Objectif 2 : Séries 3 et 4 EF-S 60 mm f/2.8 Macro USM f = 60 mm
Trépied
Marque : Manfrotto • Cibles (6)
Surface rectangulaire de 10 par 3 cm L= 10 cm, H= 3 cm, voir figure 5
20
5.2.3 Protocole
Le protocole de ce banc d’essai se compose également de deux parties, le terrain et le traitement des données. Dans le cadre de ca banc d’essai, deux séries, un et deux, ont été réalisées à l’extérieur sous une lumière naturelle et deux autres séries, soit trois et quatre ont été réalisées à l’intérieur sous un éclairage ambiant. Premièrement, la partie terrain regroupe toutes les étapes (6) permettant de recueillir les données. Trois étapes sont préliminaires aux trois étapes de l’opération terrain. Deuxièmement, la partie traitement des données regroupe quatre étapes. Les détails de chacune de ces étapes figurent comme suit ;
Partie 1 Terrain Étapes préliminaires
1. Disposer et organiser les six cibles sur une surface afin de connaitre les coordonnées relatives des cibles.
2. Noter les coordonnées relatives X, Z des six cibles.
3. Utiliser un temps de pause et une ouverture adaptés à la luminosité ambiante et mettre la mise au point en mode manuel sur l’infini.
Opération terrain
1. Se positionner de façons aléatoires vis-à-vis les six cibles. 2. Prendre une photo à chaque position.
3. Répéter les étapes 1 et 2 10 fois et plus pour chaque série
Partie 2 Traitement des données
1. Trouver les dimensions du capteur pour le boitier Canon 50D.
2. À l’aide du logiciel ImageJ, noter l’ensemble des points contours des six cibles pour chacune des photos.
3. Incorporer dans le modèle approprié tous les points images, les coordonnées relatives des cibles, les paramètres intrinsèques de l’appareil photo et les deux dimensions de la cible (programmation vba). 4. Exécuter la procédure du banc d’essai 2 pour chaque série.
6 Résultats
6.1 Banc d’essai 1
Cette section regroupe l’ensemble des résultats obtenus dans le cadre du premier d’essai. Les résultats seront présenté sous trois aspects; soit la distance entre l’observateur et la cible, la direction de la cible par rapport à l’observateur et finalement l’étalement des erreurs de coordonnées par rapport aux coordonnées fournies par la station totale. Pour commencer, la figure 10 présente un portrait global des mesures effectuées dans le cadre du premier banc d’essai.
Figure 10 : Comparaison des coordonnées de la station totale et du modèle du sténopé
La figure 10 montre simultanément les 19 coordonnées des cibles prises avec la station totale et le modèle du sténopé à quatre points obtenus avec le repère visuel 1. Présentées par des points bleus, les coordonnées trouvées avec le modèle du sténopé présentent peu de différence avec les coordonnées trouvées avec la station totale. La précision du modèle décroit progressivement avec la distance entre l’observateur et la cible. La figure 11 présente les erreurs absolues et relatives de la distance perçue en fonction de la distance réelle de la cible. !" #!" $!" %!" &!" '!!" '#!" ($!" ()*" ()!" (#*" (#!" ('*" ('!" (*" !" *" '!" !" "#$ "% %&'()#'* +,-'()'% )" #$ "% %&'(). /01 #'2 ) !""#$"%%&'()#'*+,-'()'%)+3(45((')./01#'2) !"/6+#+5("%)$'()4""#$"%%&'()$')*+)(1+,"%)1"1+*')'1)$7)/"$0*')(1&%"6&) 81+,"%)1"1+*') 9"$0*')(1&%"6&) #'60#'):) 81+,"%)1"1+*') ;3('#-+1'7#) <'60#')-5(7'*)=) <'60#')-5(7'*):)
22
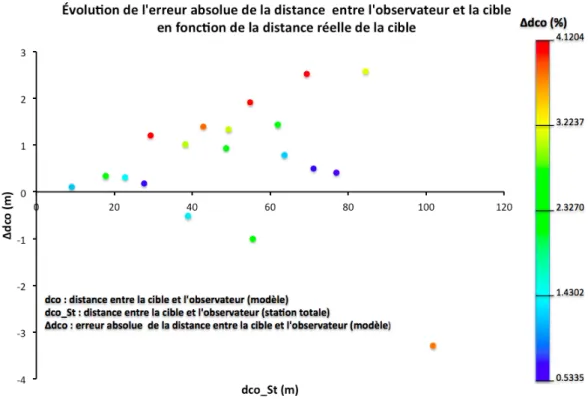
Figure 11 : Évolution de l'erreur absolue de la distance de la cible en fonction de la distance réelle de la cible La figure 11 montre l’évolution des erreurs absolues et relatives des distances perçues par le modèle du sténopé en fonction de la distance réelle d’observation. Les données de cette figure ont été obtenues à partir du modèle à quatre points et du premier repère visuel. Les distances réelles d’observation ont été mesurées à l’aide de la station totale. En détail, les erreurs absolues sont inférieures à 0,5 mètre pour des distances réelles inférieures à 30 mètres. Deuxièmement, les erreurs absolues tendent à croitre en fonction de la distance d’observation. Toutefois, il y a trois exceptions qui présentent des erreurs absolues inférieures à un mètre au-delà de 60 mètres. L’erreur absolue maximale est de -3,29 mètres et elle est observée à une distance de 102 mètres. Les erreurs relatives illustrées par des points de couleurs ne présentent pas la même corrélation que les erreurs absolues. Illustrée par des points rouges, les erreurs relatives maximales sont atteintes à des distances de 29, 43, 53, 69 et 102 mètres d’observation. Conséquemment, la distance d’observation n’est pas le seul facteur qui contribue aux erreurs de la distance des cibles. Dans une autre mesure, la figure 12 présente l’évolution de l’erreur de la direction entre la cible et l’observateur.
Figure 12 : Évolution de l'erreur de la direction en fonction de la distance réelle de la cible
La figure 12 présente l’évolution des erreurs absolues de la direction entre la cible et l’observateur en fonction de la distance réelle d’observation. Illustrées par des points bleus et rouges, les erreurs provenant des repères visuels un et deux décroissent rapidement avec la distance d’observation et se stabilisent par la suite. Les erreurs maximales sont observées à une distance de 18 mètres et correspondent respectivement à 0,83 et -0,68 degré pour les repères un et deux. Pour l’ensemble des données à l’exception de la distance à neuf mètres, les coordonnées de la cible obtenues avec le second repère sont plus précises en termes de direction que les coordonnées obtenues à partir du premier repère visuel. Le gain obtenu est en moyenne de 0,13 degré. Par conséquent, la distance du repère visuel vis-à-vis de l’observateur influence positivement la précision obtenue des mesures de direction de la cible.
!"# !$%&# !$%'# !$%(# !$%)# $# $%)# $%(# $# )$# ($# '$# &$# "$$# ")$# !" #$ %&'( )* +,% '#$-./%&0,% 12#345#6%'(%37(**(4*%'(%38%'9*($5#6%(6/*(%38%$9:3(%(/%37#:;(*28/(4*%% (6%<#6$5#6%'(%38%'9;/86$(%'7#:;(*285#6%=#4*%'(4>%*(=?*(;%29;4(3;% @(=?*(%29;4(3%A% @(=?*(%29;4(3%B%
24
Figure 13 : Écarts des coordonnées entre la station totale et le modèle du sténopé
La figure 13 illustre les différences entre les coordonnées obtenues à l’aide de la station totale et les coordonnées obtenues à l’aide du modèle du sténopé à 4 points faits en exploitant le premier repère visuel. L’origine représente les coordonnées idéales obtenues à l’aide de la station totale. Premièrement, les erreurs se répartissent à l’intérieur de trois cadrans. La majorité des données (16) est recensée dans le troisième cadrant. Ce qui signifie que les coordonnées de la cible obtenues avec le modèle sont légèrement décalées vers la droite et que la distance perçue est inférieure à la distance réelle. Deuxièmement, la grandeur des erreurs varie considérablement en fonction des axes. Elles sont minimes dans l’axe de x et maximales pour l’axe des z. Cela indique la faiblesse du modèle à bien représenter l’échelle de la profondeur. Dernièrement, les erreurs maximales sont observées aux grandes distances d’observations.
6.2 Banc d’essai 2
Cette section regroupe l’ensemble des résultats obtenus pour les quatre séries de données. Au total, 795 essais ont été effectués à partir de 53 photos. Le boitier utilisé lors des quatre séries est le Canon EOS 50D et les deux objectifs sont un zoom de 17-55 mm f/2.8 USM et un 60 mm f/2.8 macro. La position de l’observateur par rapport aux cibles et l’orientation de ces dernières ne sont connues pour aucun des essais. Toutefois, les essais un et deux limitent le déplacement et l’orientation de l’observateur à une seule direction.
6.2.1 Série 1
La série 1 a été réalisée avec un objectif ayant une focale de 17 mm et comprend 12 photos. Le dispositif de cette série montré à la figure 14 vérifie la précision du modèle avec une configuration de cibles alignées suivant l’axe de la profondeur. Les cibles sont cadrées au centre des photos et l’observateur se déplace dans le même axe que l’alignement des cibles. Les photos sont prises à main levée et l’observateur s’est reculé progressivement des cibles.
Figure 14 : Dispositif de la série 1
La figure 14 présente le dispositif de la série 1 du second banc d’essai. Alignées selon un même axe, les six cibles offrent 15 combinaisons de distance possible qui sont énumérées au tableau 2.
26
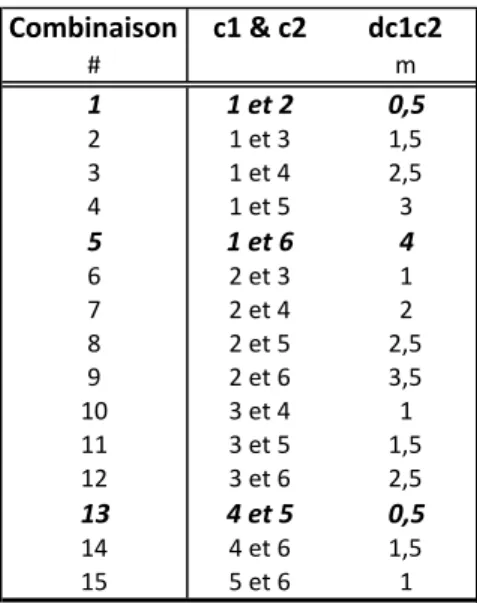
Tableau 2 : Combinaison des configurations de cible possible pour la série 1
Le tableau 2 détaille l’ensemble des combinaisons possibles des distances entre les cibles. La combinaison 1 faite avec les cibles 1 et 2 présente la plus petite distance entre les cibles pour la distance la plus éloignée de l’observateur. La combinaison 5 faite avec les cibles 1 et 6 offre la plus grande distance entre les cibles. La figure 15 affiche l’histogramme des erreurs relatives pour la série 1.
Figure 15 : Histogramme des erreurs relatives pour la série 1
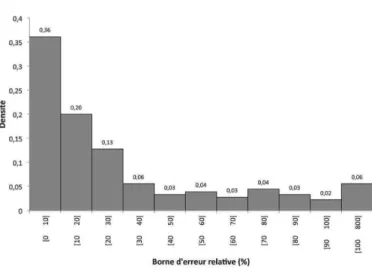
La figure 15 montre un histogramme à onze bâtons couvrant l’ensemble des erreurs relatives pour la série 1. Dans cette série, il y a 36 % des données qui présentent des erreurs relatives inférieures à 10 %. Ce pourcentage croit rapidement en fonction de la marge d’erreur relative tolérée. À titre d’exemple, on recense 69 % des données qui présentent une erreur inférieure à 30 %. Il y a seulement 6 % des erreurs qui sont supérieures à 100 %. Concrètement la répartition des erreurs relatives en fonction de la distance d’observation maximale perçue et de la distance réelle entre les cibles est montrée à la figure 16.
!"#$%&'%("& )*+,+)- .)*)-! " ! !"#$"% ! # $%&'%( # ( $%&'%) ( ) $%&'%* )+* & !"#$"' ' , #%&'%( $ - #%&'%) # . #%&'%* (+* / #%&'%, * $0 (%&'%) $ $$ (%&'%* #+* $# (%&'%, ) $( )%&'%* $+* $) )%&'%, ( $* *%&'%, $+*
Figure 16 : Évolution de l’erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 1
La figure 16 présente l’évolution de l’erreur relative en fonction de la distance maximale perçue et de la distance réelle entre les deux cibles. Présentées par des points de couleurs pour les erreurs relatives comprises entre 0 et 100% et présentées par des points noirs pour celles qui sont supérieures à 100 %, les erreurs relatives sont influencées par plusieurs facteurs différents. Premièrement, la distance maximale d’observation perçue, docp_max, contribue à l’accroissement des erreurs. Deuxièmement, l’augmentation de la distance réelle entre les cibles, dc1c2_r contribue à la diminution des erreurs. Conséquemment, le modèle est plus efficient à bien représenter la distance entre les cibles pour des cibles distantes les unes des autres et proches de l’observateur.
28
6.2.2 Série 2
La série 2 a été réalisée avec un objectif ayant une focale de 17 mm et comprend 13 photos. Le dispositif de cette série montré à la figure 17 vérifie la précision du modèle avec une configuration de cibles alignées dans le plan de l’appareil photo. Les cibles sont cadrées au centre des photos et l’observateur se déplace perpendiculairement à l’axe des cibles.
Figure 17 : Dispositif de la série 2
La figure 17 présente le dispositif de la série 2 du second banc d’essai. Alignées selon un même axe, les six cibles offrent 15 combinaisons de distance possible qui sont énumérées au tableau 3.
Tableau 3 : Combinaison des configurations de cible possible pour la série 2
!"#$%&'%("& )*+,+)- .)*)-! " ! !"#$"% &'( # $%&'%( $)* ( $%&'%+ #)* + $%&'%* ( ( !"#$") * , #%&'%( $ - #%&'%+ # . #%&'%* #)* / #%&'%, ()* $0 (%&'%+ $ $$ (%&'%* $)* $# (%&'%, #)* !+ *"#$"( &'( $+ +%&'%, $)* $* *%&'%, $
Le tableau 3 présente l’ensemble des combinaisons possibles des distances entre les cibles. Les combinaisons 1 et 13 présentent les plus petites distances entre les cibles soit de 50 cm. La combinaison 5 offre la plus grande distance entre les cibles. La figure 18 montre l’histogramme des erreurs relatives pour la série 2.
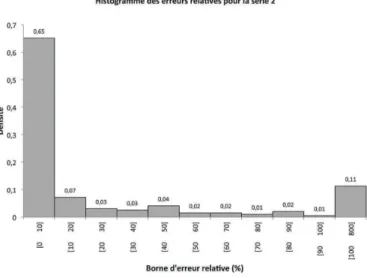
Figure 18 : Histogramme des erreurs relatives pour la série 2
La figure 18 montre un histogramme à onze bâtons couvrant l’ensemble des erreurs relatives pour la série 2. Dans cette série, il y a 65 % des données qui présentent des erreurs relatives inférieures à 10 %. Ce pourcentage croit rapidement en fonction de la marge d’erreur tolérée. En effet, on recense 75 % des données qui présentent une erreur inférieure à 30 %. Il y a 11 % des erreurs qui présentent des erreurs supérieures à 100 %. Dans le détail, la répartition des erreurs relatives en fonction de la distance d’observation maximale perçue et de la distance réelle entre les cibles est montrée à la figure 19.
30
La figure 19 présente l’évolution de l’erreur relative en fonction de la distance maximale perçue et de la distance réelle entre les deux cibles. Présentées par des points de couleurs, les erreurs relatives sont influencées par plusieurs facteurs différents. Premièrement, comme pour la série 1, la distance maximale d’observation perçue, dcop_max, contribue à l’accroissement des erreurs relatives. Deuxièmement, l’augmentation de la distance réelle entre les cibles, dc1c2_r contribue à la diminution des erreurs relatives. Conséquemment, le modèle est plus efficient à bien représenter la distance entre les cibles pour des cibles distantes les unes des autres et proches de l’observateur. Toutefois, l’évaluation de la distance entre les cibles qui sont parallèles au plan image est plus facile à établir avec précision que dans le contexte adopté lors de la première série.
6.2.3 Série 3
La série 3 a été réalisée avec un objectif ayant une focale de 60 mm et comprend 11 photos. Le dispositif de cette série montré à la figure 20 vérifie la précision du modèle pour des cibles proches les unes des autres avec une orientation de l’observateur variable. Les cibles sont cadrées de gauche à droite des photos et l’observateur se déplace dans les trois directions. Toutes les photos de cette série sont prises avec un trépied pour limiter les effets de flou inhérents aux mouvements et au manque de luminosité ambiante.
Figure 20 : Dispositif de la série 3
La figure 20 représente le dispositif de la série 3 du second banc d’essai. Alignées dans un plan orthogonal, les six cibles offrent 15 combinaisons de distance possible qui sont énumérées au tableau 4.
Tableau 4 : Combinaison des configurations de cible possible pour la série 3
Le tableau 4 affiche l’ensemble des combinaisons possibles des distances entre les cibles. Les combinaisons 5 et 14 présentent les plus grandes distances entre les cibles. Cette distance est de 1,03 mètre. La combinaison 1 offre la plus petite distance entre les cibles, soit de 0,2 mètre. La figure 21 montre l’histogramme des erreurs relatives pour la série 3.
Figure 21 : Histogramme des erreurs relatives pour la série 3
La figure 21 présente un histogramme à onze bâtons couvrant l’ensemble des erreurs relatives pour la série 3. Dans cette série, il y a 50 % des données qui présentent des erreurs relatives inférieures à 10 %. Ce pourcentage croit rapidement en fonction de la marge d’erreur tolérée. En effet, on recense 80 % des données qui présentent une erreur inférieure à 30 %. Il y a seulement 1 % des erreurs qui présentent des erreurs supérieures à 100 %. Concrètement, la répartition des erreurs relatives en fonction de la distance d’observation maximale perçue et de la distance réelle entre les cibles est montrée à la figure 22.
!"#$%&'%("& )*+,+)- .)*)-! " ! !"#$"% &'%& # $%&'%( )*+) ( $%&'%, $*)) , $%&'%+ )*-, ( !"#$") !'&* - #%&'%( )*() . #%&'%, )*/) / #%&'%+ )*+) 0 #%&'%- )*0+ $) (%&'%, )*+) $$ (%&'%+ )*,) $# (%&'%- )*0) $( ,%&'%+ )*-, !+ +"#$") !'&* $+ +%&'%- )*+)
32
Figure 22 : Évolution de l'erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 3
La figure 22 montre l’évolution de l’erreur relative en fonction de la distance maximale perçue et de la distance réelle entre les deux cibles pour la série 3. Présentées par des points de couleurs, les erreurs relatives sont influencées par plusieurs facteurs différents qui interagissent entre eux de manière à camoufler le poids de chacun de ces facteurs. Le seul constat qu’il est possible de faire à partir de cette série est de noter l’influence de la distance maximale perçue d’observation sur les erreurs relatives.
6.2.4 Série 4
La série 4 a été réalisée avec un objectif ayant une focale de 60 mm et comprend 17 photos. Le dispositif de cette série montré à la figure 23 vérifie également la précision du modèle pour des cibles rapprochées les unes des autres. Les cibles sont cadrées de gauche à droite des photos et l’observateur se déplace également dans trois directions. Toutes les photos de cette série sont prises également avec un trépied afin de limiter les effets de flou inhérents aux mouvements et au manque de luminosité ambiante.
Figure 23 : Dispositif de la série 4
La figure 23 montre le dispositif de la série 4 du second banc d’essai. Alignées dans un plan orthogonal, les six cibles offrent 15 combinaisons de distance possible qui sont énumérées au tableau 5.
Tableau 5 : Combinaison des configurations de cible possible pour la série 4
Le tableau 5 énumère l’ensemble des combinaisons possibles des distances entre les cibles. Les combinaisons 5 et 13 établies respectivement avec les cibles 1 et 6 et 4 et 5 présentent les plus grandes distances entre les cibles. Cette distance est de 1,32 mètre. La combinaison 10 établie avec les cibles 3 et 4 offre la plus petite distance entre les cibles, soit de 0,34 mètre. La figure 24 présente l’histogramme des erreurs relatives pour la série 4.
!"#$%&'%("& )*+,+)- .)*)-! " # #$%&$' ()*( ' #$%&$+ (),( + #$%&$* #)#* * #$%&$- ()., ! "#$%#& "'() . '$%&$+ ()*( / '$%&$* ()/* , '$%&$- ()/, 0 '$%&$. #)(( "* (#$%#+ *'(+ ## +$%&$- #)(-#' +$%&$. ()/. "( +#$%#! "'() #* *$%&$. ()., #- -$%&$. #)#*
34
Figure 24 : Histogramme des erreurs relatives pour la série 4
La figure 24 présente un histogramme à onze bâtons couvrant l’ensemble des erreurs relatives pour la série 4. Dans cette série, il y a 56 % des données qui présentent des erreurs relatives inférieures à 10 %. Ce pourcentage croit rapidement en fonction de la marge d’erreur tolérée. À marge d’erreur de 30 % on recense 83 % des données. Il y a seulement 2 % des erreurs qui présentent des erreurs supérieures à 100 %. Dans le détail, la figure 25 présente l’évolution des erreurs relatives en fonction de la distance maximale perçue et de la distance réelle entre les cibles.
Figure 25 : Évolution de l'erreur relative en fonction de la distance maximale perçue et des distances réelles entre les cibles pour la série 4
La figure 25 présente l’évolution de l’erreur relative en fonction de la distance maximale perçue et de la distance réelle entre les deux cibles pour la série 4. Présentées par des points de couleurs, les erreurs relatives sont influencées par plusieurs facteurs différents qui interagissent les uns avec les autres de manière à camoufler le poids de chacun de ces facteurs. Comme la série 3, le seul constat, qu’il est possible de faire à partir de cette série, est de remarquer l’influence de la distance maximale perçue d’observation sur les erreurs relatives.
7 Discussions
Cette section regroupe l’ensemble des analyses critiques pour les deux bancs d’essai réalisés. L’analyse du premier banc d’essai s’effectuera selon trois points de vue. Premièrement, l’analyse compare les distances entre l’observateur et la cible pour les cinq modèles de résolutions possibles. Cette comparaison permettra de déterminer l’efficience et les différences de chacun des modèles de résolution dans la mesure de la distance entre l’observateur et la cible. Deuxièmement, l’analyse portera sur l’influence des erreurs quadratiques moyennes, RMSE, sur la précision des mesures de distances entre la cible et l’observateur pour les cinq modèles. Et finalement, l’analyse regardera l’influence des erreurs quadratiques moyennes sur les erreurs relatives des distances d’observation. L’analyse du deuxième banc d’essai se fera selon deux points de vue. Dans un premier temps, l’analyse du second banc portera sur un calcul d’erreur classique basé sur les dérivées partielles. Et deuxièmement, l’analyse portera essentiellement sur une approche adimensionnelle basée sur les variables et les paramètres entrants du modèle du sténopé. Le principal objectif encouru par ces analyses est de trouver un ou des modèles d’erreurs définissant la précision de cette méthode sous différentes conditions d’observations.
7.1 Banc d’essai 1
7.1.1 Modèle de résolution
Le premier banc d’essai a été réalisé avec le modèle de résolution à quatre points. Dans le but de comparer l’incidence des différents modèles de résolution, la figure 26 présente l’évolution de l’erreur absolue de la distance entre l’observateur et la cible pour les cinq modèles itératifs possibles pour les 19 photos prises lors de ce banc d’essai.
36
varient d’un modèle à l’autre et d’une photo à l’autre. Ces variations se confirment avec le tableau 6 qui présente les erreurs absolues moyennes, MAE, des cinq modèles. Deuxièmement, l’écart entre les différents modèles croît progressivement avec la distance d’observation. Toutefois, pour plusieurs photos ces écarts sont minimes. En effet, comme le montre la figure 27, ces écarts répondent négativement aux erreurs de convergence, RMSE du modèle à quatre points.
Tableau 6 : Erreur absolue moyenne pour les cinq modèles
Le tableau 6 présente les erreurs absolues moyennes, MAE, pour les cinq modèles itératifs. Ces erreurs ont été déterminées à partir de l’équation 9. Les modèles B et C sont moins efficients à représenter adéquatement les distances. Les modèles A, D et E sont équivalent mathématiquement. Toutefois, le modèle à quatre points à l’avantage d’incorporer une erreur quadratique moyenne, RMSE voir l’équation 10, aux degrés de liberté trouvés par ce modèle.
!"# =1 ! !"#!− !"#_!"! ! !!! Eq 9 Où;
dcoi : distance entre la cible et l’observateur issue du modèle
dco_Sti : distance entre la cible et l’observateur issue de la station totale n : nombre de mesure de distance
!"#$ = 1 ! !!− !"! ! ! !!! Eq 10 Où;
xi : point saillant modélisé pxi : point saillant réelle capté n : nombre de point de point saillant
!"#$%& '"()*+ !,-! " #$%&$%'$%( #$# ) #$%&$%' #$* + &$%'$%( #$, - #$%'$%( #$# . #$%&$%( #$#
Figure 27 : Évolution des écarts maximaux entre les cinq modèles en fonction de la distance d'observation
La figure 27 présente en parallèle, l’évolution des écarts maximaux entre les cinq modèles itératifs et les erreurs quadratiques moyennes du modèle à quatre points en fonction de la distance réelle d’observation pour chaque essai. Premièrement, il y a une corrélation positive entre les erreurs de convergence moyenne, RMSE, et les écarts maximaux entre les différents modèles. Conséquemment, l’erreur quadratique moyenne issue du modèle à quatre points influence les écarts maximaux observés entre les cinq modèles. Toutefois, comme montré à la figure 28, il n’y a pas de relation directe entre les erreurs quadratiques moyennes et les erreurs relatives observées.
Figure 28 : Évolution de l'erreur relative en fonction de la distance réelle d’observation et de l'erreur quadratique moyenne pour le banc d'essai 1
La figure 28 présente l’évolution de l’erreur relative en fonction de la distance réelle d’observation et de l’erreur quadratique moyenne pour le premier banc d’essai. A priori, il n’y a aucune relation directe qui relie les erreurs relatives aux distances d’observation combinées aux erreurs quadratiques moyennes. En effet, pour une