MÉMOIRE PRÉSENTÉ À
L'UNIVERSITÉ DU QUÉBEC À CHICOUTIMI COMME EXIGENCE PARTIELLE DE LA MAÎTRISE EN INGÉNIERIE
PAR ADILKAMIL
APPLICATION D'UN ALGORITHME HYBRIDE À COLONIES DE FOURMIS AU PROBLÈME D'AFFECTATION QUADRATIQUE
Mise en garde
La bibliothèque du Cégep de l’Témiscamingue et de l’Université du Québec en Abitibi-Témiscamingue a obtenu l’autorisation de l’auteur de ce document afin de diffuser, dans un but non lucratif, une copie de son œuvre dans Depositum, site d’archives numériques, gratuit et accessible à tous.
L’auteur conserve néanmoins ses droits de propriété intellectuelle, dont son droit d’auteur, sur cette œuvre. Il est donc interdit de reproduire ou de publier en totalité ou en partie ce document sans l’autorisation de l’auteur.
DANSLECADREDUPROGRAMME DE MAÎTRISE EN INGÉNIERIE
DE L'UNIVERSITÉ DU QUÉBEC À CHICOUTIMI OFFERT PAR EXTENTION À L'UNIVERSITÉ DU QUÉBEC
Le problème d'aménagement d'usines consiste à trouver l'arrangement le plus efficace d'un nombre donné de départements. Ce problème est un problème complexe et difficile. Les méthodes de résolution exactes sont limitées à des problèmes de taille relativement petite. C'est la raison pour laquelle de nombreuses méthodes approchées ont été adaptées à la résolution de ce problème. Parmi ces adaptations on retrouve les algorithmes à base de méta-heuristiques. Dans ce mémoire, le problème d'aménagement d'usines est modélisé comme un problème d' affectation quadratique qui est étudié en utilisant la méta-heuristique des colonies de fourmis. Cette dernière s'inspire du comportement collectif du dépôt et du suivi de pistes observées dans les colonies de fourmis réels. L'algorithme proposé est couplé à un algorithme de recherche locale permettant d'améliorer les solutions générées par les fourmis. L'exécution de cet algorithme est évaluée selon deux facteurs : la qualité de solution et le temps de calcul. Des résultats numériques illustrant 1' approche proposée sont présentés.
Cette recfiercfie s'est réa{isée grâce au soutien et à {'encouragement ae p{usieurs personnes qui ont contri6ué chacune à feur façon à {'atteinte ae {' o6jectif que constitue (e aépôt ae ce mémoire. Je tiens à feur aaresser un très grana merci.
Je tiens à remercier très sincèrement mon cfirecteur cfe recfiercfie {e Professeur ?rf.ustapfia :Nourelfatfi, pour sa granae aisponi6ifité tout au {ong ae ce travai[ Son encaarement, ses conseifs et son e:x;périence m'ont pennis
â
acquérir fes connazssances inaispensa6fes au aéve{oppement et à {' a6outissement ae ce travai[Je remercie égafement ?rf.onsieur :Na6i{ :Nafias pour son support. J{ m'a souvent encouragé et supporté {ors cfe {a réa{isation ae ce travai~ et a m'a généreusement fait profiter ae son e:x;périence et ae ces connaissances. Je {ui en suis très reconnaissant.
Je tiens égafement ma profonae reconnaissance pour L 'Vniversité au Qué6ec en )'l6iti6i-rr'émiscamingue pour {e support financier à travers une e~mption partief{e aes frais ae scofarité.
Œgafement, je présente mes remerciements et ma gratituae à mes parents pour feur soutien mora{ et financier à {a poursuite cfe mes étucfes. o/ous m'avez toujours encouragé à poursuivre mes rêves et à me aépasser. Ce mémoire vous est aécfié.
Pinafement, à toutes fes autres personnes qui ont gravité autour ae moi penaant ces aeuJC aemières années, qui m'ont supporté et encouragé. Je vous ais un gros merci. J'espère que ce mémoire saura com6fer vos attentes.
TABLE DES MATIÈRES
RÉSUMÉ .... .. ... ... ... . ... ... . .. . ... ... .... ... . ... . ... .. .. .. .. ... . ... . .iii
REMERCIEMENTS . .. .. ... . ... ... . .. ... . ... . .. ... ... .... ... ... ... . ... . . . .... iv
TABLE DES MATIÉRES ... . ... . . .. . ... .. ... v
LISTE DES FIGURES . ... ... ... . .. . .... .. ... .iix
LISTE DES TABLEAUX ... . ... . ... ... ... . ... ... .. ... xi
INTRODUCTION GÉNÉRALE ... .... ... .. ... . ... ... ... ... . ... 1
Chapitre 1
Généralités sur l'aménagement
1.1 INTRODUCTION ... ... ... 41.2 PROBLÈME DE L'AMÉNAGEMENT ... ... ... ... .. ... . .. .. .. .. 8
1.3 CLASSIFICATION DE PROBLÈMES D' AMÈNAGEMENT ... . ... .. . ... ... 1 0 1.4 LES PARAMÈTRES DE L'AMÈNAAGEMENT ... ... . .. ... 17
1.4 .1 Calcul des distances ... ... ... .. ... . ... 18
1.4.2 Le flux et le modèle d'acheminement. . ... .. ... .. ... . 19
1.5 LE PROBLÈME D' AMÈNAGEMENT STATIQUE ... ... .... ... ... .... 22
1.5.1 Modélisation comme un probléme d'affectation quadratique .. ... ... 23
1.5.2 Présentation du problème d'affectation quadratique ... .. . . ... 24
1.5.3 Application principales ... . .. ... ... .. ... ... ... . .. ... .. .27
Chapitre 2
Revue de la littérature
2.1 INTRODUCTION ... .. ... . ... ... ... ... . ... 30
2.2 ALGORITHMES EXACTES ... ... ... .... .. .. .. ... . .... ... 33
2.2.1 les algorithmes par séparation et évolution ... .. .... ... ... 34
2.2.2 Les plants sécants ... ... 38
2.2.3 Algorithmes grapiques ... .... ... .... ... ... . ... .40
2.2.4 Algorithmes de construction .. ... ... ... ... ... ... .. ... .41
2.3 LES DIFFÉRENTS TYPES DE MÉT AHEURISTIQUES ... ... .. .... ... .. .42
2.3.1 Les approches de recherche locale . ... ... ... .. ... .42
2.3 .1.1 Le ricuit simulé ... ... ... .... .. ... .43
2.3.1.2 La recherhce avec tabous ... .... . ... . ... . ... .48
2.3.1.3 Plafond dégradé ... ... ... ... ... .. ... . ... . ... 51
2.3.2 Les approches évolutives . . ... .... ... .. ... . ... 53
2.3.2.1 Les algorithmes génètiques ... .. ... 53
2.3 .2.2 Algorithme à colonies de fourmis ... .. ... ... ... 59
Chapitre 3
Méthodologie
3.1 INTRODUCTION ... .. . ... .. ... ... ... . ... . 67
3.2 IDÉES DE BASE . ... ... . ... .. . ... ... ... ... .... ... . .. .. ... .... 68
3.3 MÉTHODE DE RÉSOLUTION ... ... . ... . ... . ... 71
3.4 FONCTIONNEMENT DE L'ALGORITHME PROPOSÉ .. .... ... ... 78
3.5 EXEMPLE DE DÉROULEMENT DE L'ALGORITHME .. ... . ... ... ... 80
3.6 CONCLUSION ... . .. . ... .. ... .... ... .. ... . .. .. ... 82
Chapitre 4
Expérimentation et Résultats
4.1 INTRODUCTION ... 834.2 INSTANCES CONSIDÉRÉES .... ... ... . ... ... 84
4.3 RÉGLAGE DES PARAMÉTRES ... ... ... 84
4.4 RÉSULTATS NUMÉRIQUES .... .... . ... ... ... ... . ... 90
4.5 CONCLUSION .. ... ... . .. ... ... . . .... ... ... . .... ... .... 98
Chapitre 5
Conclusion
BIBLIOGRAPHIE
ANNEXE
LISTES DES FIGURES
Chapitre 1
Fig.l.l- Classification du problème d'aménagement
(nouvelles caractéristiques de service) ... .. ... . 12
Fig.J.2- Classification du problème d'am énagement (endroits existants de service) .... ... .... ... . ... ... ... .... . .... .. 13
Fig.J. 3- Classification du problème d'aménagement (nouvelles et existantes interactions de service) .. ... . ... . .. .... . 14
Fi g.I. 4- Classification du problème d'aménagement (caractéristiques de l'espace de solution) . .. . . .. ... . ... ... ... 15
Fig.l.5- Classification du problème d'aménagement (mesure de distance) ... ... 16
Fig.l. 6- Classification du problème d'aménagement (objet) . ... .. ... ... ... ... . 17
Fig.J. 7-Distances euclidiennes et rectilinéaires ... . ... . ... 19
Fig.l. 8- Distances euclidiennes et rectilinéaires ... . ... ... ... ... . 20
Fig.l.JO- Exemple des emplacements et affectation des équipements aux emplacements .. .25
Fig.l.ll- Un exemple simple de l'affectation quadratique .. ... . ... ... ... . . 26
Fig.l.l2- Emplacement des composantes en désordre ... . ... ... .... ... .. 28
Fig.l.l3- emplacement des composantes en ordre par (QAP) .... ... .. . ... . 28
Chapitre 2
Fig.2.1- Une coupe ... ... ... ... ... .... ... ... ... . . . .. ... 39Fig.2.2- Exploration de X par une approche de recherche locale ... ... . .. . ... .43
Fig.2.3- Algorithme de recuit simulé ... ... ... ... ... .... ... .. ... .46
Fig.2.4- Algorithme de la recherche de tabou ... ... .. .. ... .... ... ... ... 50
Fig.2.5- Algorithme de plafond dégradé (degraded ceiling) ... . ... . 52
Fig.2.6- Croisement« un point» de deux génotypes de 5 bits ... .... ... .. 56
Fig.2. 7-Algorithme évolutionnaire ... .. .. .... 58
Fig.2.8- exemple de fourmis réelles ... ... . ... ... ... ... ... 60
Fig.2.9- Cas d'un obstacle dans le chemin ... ... 61
Chapitre 3
Fig. 3.1- Recherche locale ... 70
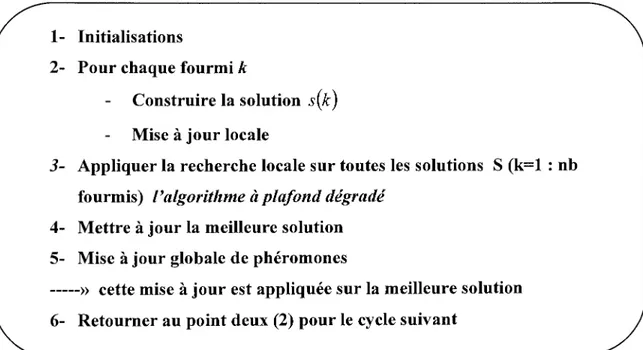
Fig.3.2- Algorithme de colonies defourmis_plafond dégradé ... 72
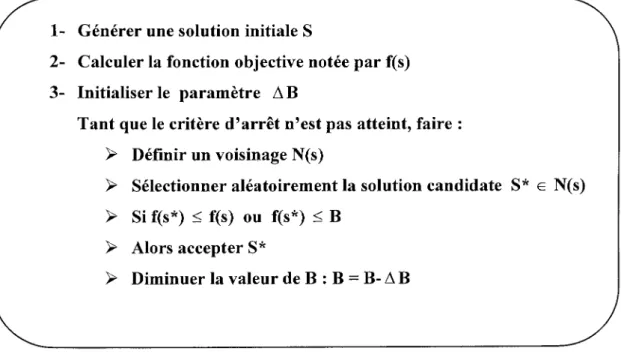
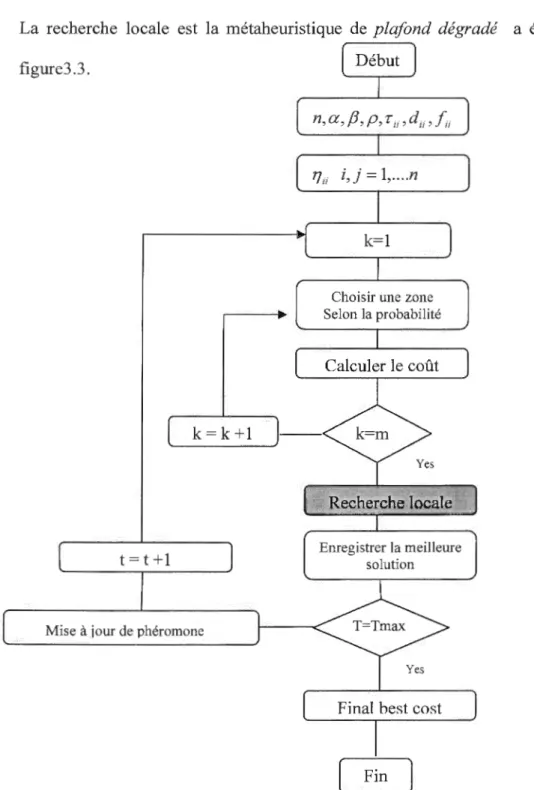
Fig.3.3- Algorithme de plafond dégradé ... .... 77
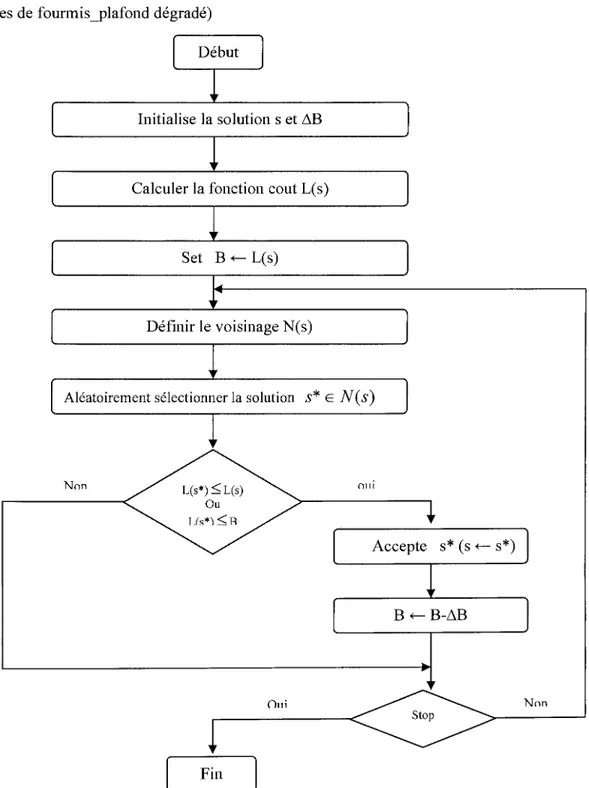
Fig.3.4- Organigramme de l'algorithme du plafond dégradé ... ... 78
Fig.3.5- Organigramme de l'algorithme à colonies de fourmis . . ... .... 79
LISTE DES TABLEAUX
Chapitre 2
Tableau 2.1- Analogie entre un problème d'optimisation et un système physique ... .. .44
Chapitre 4
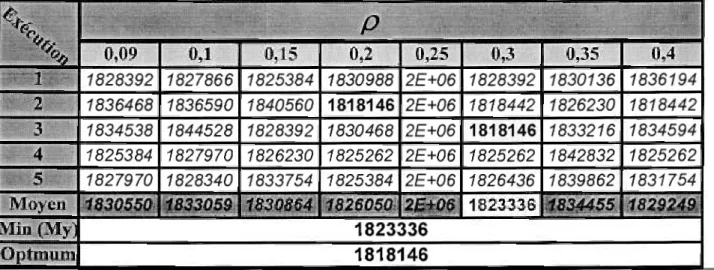
Tableau 4.1 -Réglage du paramètre"p " ...
85Tableau 4.2- Réglage du paramètre "~" (valeur moyenne)86 Tableau 4.3- Réglage du paramètre "~" (valeur minimale) ... 87
Tableau 4.4- Réglage du paramètre "T/ ". (valeur moyenne) ... ... 88
Tableau 4. 5 -Réglage du paramètre "11 ". (valeur minimale) ... 89
Tableau 4. 6- Paramètres choisis (min) ... .. ... 90
Tableau 4. 7-Paramètres choisis (moyen) ... 90
Tableau 4.8- Résultats obtenus pour le problème Sko42 ... 91
Tableau 4.9- Résultats obtenus pour le problème Tai20 ... .. ... 92
Tableau 4.10- Résultats obtenus pour le problème Tai 25b ... . ... .... 93
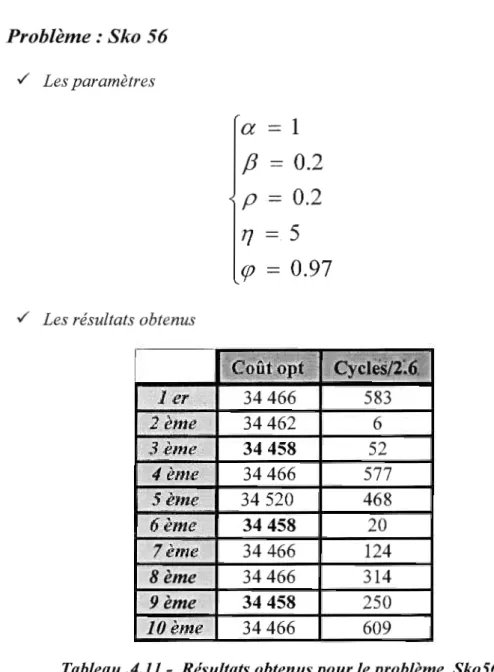
Tableau 4.11 -Résultats obtenus pour le problème Sko56 ... ... 94
Tableau 4.12- Résultats obtenus pour le problème Els19 ... ... 95
Tableau 4.13- Résultats obtenus pour le problème Wil50 ... 96
Le marché des consommateurs d'aujourd'hui exige que les fabricants soient concurrentiels. Afin de maintenir la compétition, cela requiert des opérations efficaces de la part des usines et des capacités à répondre rapidement aux changements de produits. L'aménagement d'usines est un domaine de recherche exploité depuis longtemps. Les approches de conception ont évolué au fil des ans et la problématique est encore bien présente. Il existe un ensemble important de formulations et de modèles pour résoudre le problème de l'aménagement d'usines. Certaines de ces formulations sont simples, tandis que d ' autres peuvent être complexes. L'une des formulations simples utilisée est la représentation par le problème de l' affectation quadratique (PAQ, ou QAP en anglais pour Quadratic Assignment Problem). Bien que simple à modéliser, cette formulation reste
difficile à résoudre.
Le problème d'affectation quadratique est en effet un problème classique d'optimisation combinatoire dans lequel il convient de trouver le placement optimal de n objets ''usines, matériels" dans n locations tout en minimisant le coût qui dépend à la fois des distances inter-locations et des :flux inter-objets. Il s'agit de trouver l'affectation qui permettra de minimiser le coût total. Le QAP est un problème important en optimisation combinatoire qui possède de nombreuses applications (placement, ordonnancement,
synthèse d'images, etc .), dont les algorithmes exacts tel que l'algorithme par séparation et évaluation (branch-and-bound) ne peuvent traiter que des instances taille relativement petite.
L'objectif de ce travail est d'aborder le problème d'affectation quadratique en utilisant des méta-heuristiques comme approche de résolution, en particulier l'algorithme à colonies de fourmis couplé à 1' algorithme du plafond dégradé.
Ce mémoire est organisé comme suit : le premier chapitre présente des généralités sur l'aménagement d'usines, une définition du problème d'affectation quadratique (PAQ) et quelques applications principales.
Dans le deuxième chapitre, une revue de la littérature présentera succinctement les différentes approches de résolution qui ont été proposées. En effet, nous nous intéresserons aux méta-heuristiques. Il existe deux types d'approches de résolution: les méthodes exactes et les approches heuristiques. Les sections 2. 2 et 2. 3 vont présenter brièvement une liste des méthodes disponibles. Pour des cas de petite taille, les méthodes exactes de résolution sont très performantes et donnent d' excellents résultats. Toutefois, lorsque la taille augmente, les méthodes exactes deviennent plus « lourdes » puisque leur temps augmente. Les méta-heuristiques forment une famille d'algorithmes d'optimisation. Ce sont des stratégies qui permettent de guider la recherche vers une solution optimale. Parmi ces méthodes, les algorithmes à colonies de fourmis forment une classe de méta-heuristiques récemment
proposée pour les problèmes d'optimisation difficile. Ces algorithmes s'inspirent des comportements collectifs de dépôt et de suivi de pistes observés dans les colonies de fourmis. Une colonie d'agents simples (les fourmis) communiquent indirectement via les modifications dynamiques de leur environnement (les pistes de phéromone) et construisent ainsi une solution à un problème donné en s'appuyant sur leur expérience collective.
Le troisième chapitre présentera l'approche que nous utilisons pour résoudre le problème d'aménagement d'usines modélisé comme un problème d'affectation quadratique. Dans le cadre de ce travail, les efforts de recherche ont été mis sur la résolution du problème d'affectation quadratique par les méta-heuristiques en appliquant une hybridation de deux méta-heuristiques. L'idée c'est de faire coopérer des algorithmes de recherche, ce qui signifie que nous parlons alors d'un algorithme hybride. Les résultats fournis par le premier algorithme sont les solutions initiales du second. En ce qui concerne l'hybridation que nous avons réalisée, un algorithme à colonies de fourmis et un algorithme à plafond dégradé collaborent pour résoudre le problème d'affectation quadratique.
Au quatrième chapitre, nous présentons un réglage des paramètres de l'algorithme hybride et des résultats expérimentaux issus de son application au PAQ. Nous terminons par une discussion de ces résultats.
Enfin, le dernier chapitre présente une conclusion et quelques perspectives de ce travail.
l _
GÉNÉRALITÉS SUR L'AMÉNAGEMENT D'USINES
1.1 INTRODUCTION
Actuellement dans le monde des affaires, les entreprises font face à divers enjeux stratégiques et financiers, de telle sorte que la planification et l' aménagement d'usines deviennent nécessaires. De ce fait, les sociétés qui désirent réussir doivent régulièrement actualiser leurs stratégies d'aménagement afin d'adapter ses procédés au niveau de la production, pour satisfaire les besoins grandissants dans le marché. Aussi, cette capacité d' ajustement est indispensable pour demeurer à l' affût de la compétition et pour de nouvelles innovations technologiques.
Afin de répondre à la demande grandissante des consommateurs, les entreprises doivent maintenir ou augmenter leur rendement. Pour demeurer dans l'engrenage de la compétition, les sociétés doivent fréquemment prendre plusieurs décisions stratégiques
concernant la répartition départementale de leur entreprise. Bien que ces décisions aient un impact positif sur l'accroissement de l'entreprise, les résolutions adoptées sont centrées sur des problématiques anticipées. Néanmoins, au fur et à mesure que la compagnie va prendre de 1 'expansion, elle sera tout de même confrontée à certaines difficultés liées à
l ' aménagement, autrement dit, elle devra faire face à des problèmes d'aménagement.
La conception de l'aménagement d'une organisation relève d'une décision importante d'investissements et requièrent des efforts considérables, ainsi que des engagements à long terme. Son but essentiel est basé sur la détermination d'un arrangement départemental ou entre unités de travail (work unit) afin d'en tirer le plus de satisfaction (et d'en générer le maximum de profits) en minimisant le coût d'exploitation, en augmentant la qualité et en réduisant le délai de livraison au client. Généralement, le choix d'un arrangement doit supporter la stratégie de fabrication de cette entreprise. Cette stratégie de fabrication détermine la façon que 1' entreprise a choisie pour satisfaire la demande de ses clients (produit à qualité supérieure, coût inférieur, délais de livraison très courts).
L'entreprise doit se positionner par rapport à ses déférents environnements, par la suite, elle aura à décider le type d'arrangement qu'elle voudra adopter. Il s'agit d'une décision importante qui doit se baser sur une anticipation de l' évolution du marché et du comportement de la compétition.
Dans 1' aménagement, quelque soit 1' environnement de fabrication, les entreprises ont intérêt à passer par différentes études et analyses qui leur permettront de mettre en jeu des critères majeurs et importants afin de déterminer l'arrangement départemental le plus efficace. Parmi ces critères, on peut citer les éléments suivants:
o Investissements en équipements de production, de manutention, d'entreposage et en bâtisse;
o Politique de gestion de stock;
o Coûts de fabrication dans la nouvelle implantation ; o Coûts de gestion dans la nouvelle implantation ;
o Facilitation d'une expansion future, adaptabilité, flexibilité ; o Efficience du circuit des produits ;
o Efficience de la manutention ; o Efficience du stockage ; o Utilisation des surfaces ; o Utilisation des équipements; o Qualité du produit ;
o Compatibilité avec les plans à long terme de 1' entreprise ; o Conditions de travail et satisfaction du persmmel ;
o Facilité de supervision et de contrôle;
C'est la prise en compte globale de ces critères majeurs qui permet de déterminer un arrangement efficace et bénéfique. La connaissance de ces critères conduit à la modélisation mathématique du problème de l'aménagement. Diverses analyses et études ont été effectuées afin de quantifier ces critères et de les représenter par quelques paramètres contrôlables. Les études ont démontré par exemple, que le flux et le volume de la matière transportée entre départements représentaient bien les paramètres de résolution dans un modèle mathématique.
Dans le cadre de ce travail, nous allons étudier le problème d'affectation quadratique qui est lié à l'aménagement d'usines. Ce dernier revêt un intérêt particulier au sein des entreprises, car ces dernières doivent faire face aux défis de l'économie. En effet, les sociétés doivent anticiper les impacts qu'auront l'ajout d'un produit à l'avenir. Par ailleurs, l'aménagement d'usines est un domaine de recherche qui est exploité depuis longtemps. Aussi, les approches de conception ont évolué au fil des ans et la problématique est encore bien présente.
La section suivante va concerner l'élaboration du problème d'aménagement d'usines tel que vu par divers chercheurs.
1.2 PROBLÈME DE L'AMÉNAGEMENT
Qu'une entreprise soit ancienne ou nouvellement établie, elle rencontre le même problème : l'aménagement de l'usine. Cette problématique d'ordre général doit être suivie d'une décision stratégique qui peut être bénéfique à long terme à l'entreprise qui désire augmenter son rendement opérationnel et monétaire, et répondre aux exigences de la demande des consommateurs. Parmi les différentes situations qui font appel au besoin d'un aménagement ou réaménagement, nous avons :
o La conception d'une nouvelle organisation; o L'inefficacité des opérations;
o Le changement de conception des produits ou services ; o Les nouveaux produits ou services ;
o Le changement de volume ; o Le changement de modèle ; o L'ajout des nouvelles opérations; o La sécurité du travail;
o Les problèmes psychologiques.
Toutefois, l'aménagement d'usines doit tenir compte de divers facteurs, dont les coûts. L'aménagement d'usines génère des coûts énormes, d'où l'importance de faire un bon choix. Il arrive qu'une compagnie doit investir un capital important pour l'acquisition de nouveaux biens. Certaines compagnies, par exemple, auront à acquérir un nouvel
établissement ou un terrain, alors que d'autres n'auront qu'à se procurer des matériaux de construction ou des équipements spécialisés; parfois elles devront obtenir les deux. Cependant, l'obtention de ces biens ne doit pas constituer un enjeu négatif pour l'aménagement d'usines, ca:r à long terme cette stratégie s' avère avantageuse. En effet, Francis, McGinnis et White (1992) mentionnent que l'aménagement d'usines a un impact
positif sur la productivité générale de l'entreprise.
Le problème d' aménagement d'usines est la détermination de l'arrangement le plus efficace des départements dans une usine. L'arrangement efficace des ressources (par exemple: machines, départements, ou main d' œuvre) dans l'usine a pour effet une bonne coordination du déroulement des opérations entre les ressources. Un aménagement efficace est avantageux pour des opérations qui dépendent du flux du travail afin qu'elles soient bien performantes. Par exemple, dans une entreprise manufacturière, l' efficacité d' un aménagement se traduit par une bonne coordination du flux du matériel entre les machines, de sorte que les bonnes quantités de matériaux soient fournies aux machines au bon moment de manière à éviter l'accumulation d'inventaire causée par le processus du travail. De plus, cet aménagement efficace évite la sur-utilisation de manutention du matériel et réduit son coût. Ainsi, un bon aménagement aide une compagnie et contribue à l'efficacité globale des opérations. De plus, Francis, McGinnis et White (1992) mentionnent que d'autres objectifs peuvent être considérés :
o Minimiser le temps global de production ; o Minimiser les investissements en équipements ;
o Utiliser le plus efficacement 1 'espace disponible ; o Faciliter le processus manufacturier;
o Favoriser 1 'utilisation efficace de la main d'œuvre ; o Maintenir la flexibilité de l'arrangement et de l'opération;
o Fournir aux employés un environnement pratique, sécuritaire et confortable; o Minimiser les variations dans les types d'équipements de manutention utilisés.
Tompkins et al (1996) soulignent que le coût de manutention est la mesure qui
détermine l'efficacité d'un aménagement:
"Material handling cast is the most signijicant measure for determining the efficiency of a layout and is most often considered, since it represents
20 ta 50% of the total operating cast and 15 to 70% of the total cast of manufacturing a product. "
1.3 CLASSIFICATION DE PROBLEMES D'AMENAGEMENT
Dans un sens, le problème d'aménagement d'usines peut être considéré comme une classe spéciale de problème de localisation de service. Le problème d'aménagement d'usines comprend la détermination de l'endroit, par exemple des bureaux, aussi bien qu'une détermination de la taille et de la configuration des bureaux.
En classifiant des problèmes de localisation de service, six (6) éléments principaux doivent être considérés: de nouvelles caractéristiques de service, endroits existants de service, nouvelles et existantes interactions de service, les caractéristiques de l'espace de solution, la mesure de distance, et la fonction objective. Ces éléments sont dépeints sur les figures 1 à JO adaptées de (Richard L. Francis John A. White «facility layout and
location an analytical approach »)
Les problèmes de localisation de département peuvent être classifiés selon le nombre d'équipements impliqués. En outre, les nouveaux équipements peuvent occuper un point précis de l'espace ou toute la surface. Le nombre de nouveaux équipements est une variable de décision. Finalement, le nouvel endroit du nouveau département peut être dépendant ou indépendant de la localisation des nouveaux équipements restants.
Si la surface est considérée pour les nouveaux et les anc1ens équipements, le problème de localisation est souvent classifié comme un problème d'aménagement d'usines. Dans ce cas, la taille et la configuration de l'espace sont des variables de décision. Dans le problème d'aménagement les équipements peuvent être des bureaux, des entrepôts, des machines, etc.
Simple Point Nouveaux équipements Problème d'aménagement Paramètre Indépendant Multiple Secteur Autre
V aria ble de décision
Dépendant
Fig.J.l- Classification du problème d'aménagement (nouvelles caractéristiques de service)
La localisation d'un département existant peut être statique ou dynamique, aussi bien que déterministe ou probabiliste. En plus, dépendant des tailles des départements existant, il peut être considéré comme ayant un point de localisation ou toute la surface. Une classe spéciale du problème de localisation de département impliquant l'occupation de l'espace est un problème d' aménagement. Quand les équipements existant sont inclus dans le problème d'aménagement, un problème de réaménagement peut exister. Dans ce cas, la
configuration et la position des équipements existant doivent être considérées. Un problème d'aménagement ou de re-localisation intervient quand la position d'un département existant est une variable de décision.
Endroits existants de service
r
1
Statique Dynamique1
Déterministe Probabiliste 1 1 Point Secteur1
1
Paramètre Variables de décision Fig.1.2- Classification du problème d'aménagement(endroits existants de service)
Lorsqu'il existe une relation quantitative ou qualitative entre les équipements, on considère que les équipements interagissent. Dans certain cas, le degré d'interaction est une fonction de la position des équipements. Il est vrai qu'il y a un nombre de situation où ce type d'interaction est indépendant des localisations des départements. En outre, l'étendue
de l'interaction peut être soit statique ou dynamique, soit déterministe ou probabiliste, et soit un paramètre ou une variable de décision.
Nouvelles Interactions de service
1
1
Qualitatif Quantitatif
1
1
Endroit dépendant Endroit indépendant
1
1
Statique Dynamique
1
1
Déterministe Probabiliste
1
1
Paramètre Variable de décision
Fig.1.3- Classification du problème d'aménagement (nouvelles interactions et interactions existantes de service.)
La quatrième catégorie considérée pour classifier le problème de localisation concerne l'espace de solution pour le problème de localisation. Dans un certain problème de localisation de département, l'espace de solution est dimensionnel; cependant, il existe
généralement un espace de solution à deux ou trois dimensions. Aussi, 1 'espace de solution peut être soit discret ou continu. L'espace de solution discret consiste en un nombre fini de localisations possible. Tandis que l'espace de solution continue est un nombre infini de localisations possible. Dans un autre cas, l'espace de solution peut être limité par une ou plusieurs contraintes. L'aménagement discret implique des modules discrets, tels que les compartiments dans un entrepôt, tandis que 1' aménagement continu considère les modules comme des points.
1
1
Espace de solution
1
1
Dimension simple Multidimensionnel
1
1
Discret 1 Continu1
1
Contrainte 1 Sans contrainteFig.1.4- Classification du problème d'aménagement (Caractéristiques de l'espace de solution.)
La mesure de distance impliquée dans les problèmes de localisation fournit une autre classification. Les distances euclidienne et rectiligne sont souvent utilisées. Cependant, il existe un nombre de problèmes de localisation de département dont les distances entre les départements ne peuvent pas être raisonnablement représenter. C'est le cas d'un problème de localisation urbain dans lequel les rues ne forment pas une grille rectangulaire.
Mesure de distance
Euclidienne
Fig.l.S- Classification du problème d'aménagement (mesure de distance)
La dernière catégorie, souvent utilisée pour classifier le problème de la localisation, est la fonction objective employée pour évaluer des solutions alternatives. Dans le cas de problème d'aménagement, un nombre d'objectifs qualificatifs est souvent utilisé, tandis que les objectifs quantitatifs sont utilisés pour résoudre le problème de localisation.
Les objectifs quantitatifs rencontrés dans les problèmes de localisation sont la minimisation de la somme totale de la fonction coût ou la minimisation de coût entre deux équipements. On peut rencontrer d'autres objectifs utilisés dans la littérature. Toutefois,
quelques problèmes d'aménagement ne pourraient pas être complètement classifiés en utilisant les catégories que nous avons suggérées.
Objectif
Qualitatif Quantitatif
1
1
Minimiser le coût Maximiser le coût
total total
1 Autre
Î
Fig.l. 6-Classification du problème d'aménagement (Objectif)
1.4 LES PARAMÈTRES DE L'AMÉNAGEMENT
Dans un aménagement d'usines, il existe un ensemble de paramètres à déterminer tel que l'interaction entre les centres (le flux) et la distance entre deux centres.
1.4.1 Calcul des distances
Géométriquement, un centroïde peut être défini comme étant le centre de gravité, ou centre de la masse d'un objet. Dans le domaine de l'aménagement d'usines, le centroïde d'un département est le centre du département. En outre, les distances rectilinéaires et euclidiennes sont généralement, les mesures le plus utilisées (Figure.l. 7).
La distance euclidienne correspond à une distance à vol d'oiseau entre deux points. Elle est définie par la formule suivante :
Equ. 1.1
La distance rectilinéaire entre deux points quelconques (x~' y
Jet
(x2 , y2 ) correspond à la somme des déplacements selon chacun des axes cartésiens. Elle se calcule par la formule suivante:La distance rectiligne entre deux centres est souvent la plus utilisée dans le cas de l'aménagement d'usines. 2 _ - -
_1
2 Distance rectilinéaire ,/
1/
/
/
(XJ,YJI Distance euclidienneFig.1.7- Distances euclidiennes et rectilinéaires
1.4.2 Le flux et le modèle d'acheminement
Il existe plusieurs types d'interactions entre les centres de départements dont la matrice de flux. Cette matrice se présente généralement sous 1 'une des deux formes suivantes:
Des flux directionnels: n unités se déplacent du centre i vers le centre j Des flux non directionnels: n unités circulent entre les centres i et j
Dans la modélisation mathématique d'un aménagement, le terme ''analyse des flux'' se réfère principalement aux flux des matières entre départements. Cette analyse
Par exemple, si le flux entre les départements A et D sont de 500 alors que les flux entres les départements A et F sont de 1500, alors les flux entre A et F sont plus importants, donc, il est préférable de placer F plus près de A que de placer D plus près de A.
Fig.J. 8- Distances euclidiennes et rectilinéaires
En règle générale, le modèle d'acheminement le plus simple et le plus direct sera le plus efficace. Ceci ne veut pas nécessairement dire que le déplacement doit se faire en ligne droite. Assez souvent, il faut refaire le chemin parcouru. Dans ce cas, l'acheminement des matières entraîne des coûts élevés. L'existence d'une telle situation révèle généralement que l'on parcourt des distances inutiles et il en résulte que les frais de manutention sont trop élevés.
Réception Réception ,...-- ,-i _ ,
J
! : n : 't
i
f
t
l
ttitft!t
l
~ _ ,,Expédition Réception Expéditior. Expédition Expédition Réception
Fig.l. 9-Modèles d'acheminement
Modèle en (orme de 1:
Dans ce cas, les matières entrent par une extrémité de l'usine et se déplacent en ligne droite. Les produits finis sont entreposés à l'autre extrémité de l'usine et expédiés de cet endroit. Au fur et à mesure que le nombre d'opérations s'accroît, l'acheminement se fera de plus en plus en zigzag, mais les matières se déplacent quand même dans la même direction.
Modèle en (orme de U:
Selon ce modèle, le service de 1' expédition et celui de la réception sont situés à la même extrémité de l'usine. Les deux services peuvent être l'un près de l'autre et peuvent
utiliser la même zone de chargement. Les produits en cours vont d'une extrémité à l'autre de l'usine puis reviennent au point de départ. Ce modèle peut être en usage dans toute usine, quelle que soit sa taille. Il convient, toutefois, davantage aux petites usines et à leur plan d'aménagement. En effet, les fonctions réception et expédition peuvent être sous la supervision d'une même personne, ce qui est souvent indispensable dans les petites usines.
Forme convolutée :
Les usines dont 1' aménagement est complexe doivent avoir de nombreux ateliers. L'acheminement des matières se fait selon une forme convolutée (il y a ainsi dire un mouvement de va et vient d'une extrémité a l'autre de l'usine), ce qui permet le déplacement en ligne droite à l'intérieur d'un espace restreint. Souvent, le modèle en forme '' l" à tendance à se modifier et à devenir un modèle convoluté. Dans ce cas, le service de la réception et celui de l'expédition peuvent être situés à la même extrémité de l'usine ou à l'opposé l'un de l'autre.
1.5 LE PROBLÈME D'AMÉNAGEMENT STATIQUE
Le problème d'aménagement statique consiste à déterminer l'arrangement le plus efficace des départements à l'intérieur de l'usine lorsque le flux entre les départements reste constant durant la planification horizontale.
Cette recherche se concentre sur la représentation d'un aménagement discret qui consiste à diviser l'usine avec des cases pré-localisées de tailles prédéterminées. La discrétisation peut prendre la forme d'une grille de cases carrées de dimension égales formant les distances unitaires.
1.5.1 Modélisation comme un problème d'affectation quadratique
Le problème d'affectation quadratique (PAQ) ou bien " Quadratic Assignment Problem (QAP)" a été formulé pour la première fois en 1957 par KOOPMANS et
BECKMANN. Dès lors, il s'est révélé comme ayant de très nombreuses applications
pratiques étant les plus intéressantes. Entre autres, le placement de circuits électroniques et la réparation des services médicaux dans les grands centres hospitaliers .
Cependant, étant particulièrement difficile à résoudre, le problème d'affectation quadratique a fait l'objet de diverses publications. En effet, jusqu'à ce jour, les méthodes exactes '' l'algorithme par séparation et évaluation branch-and-bround" les plus performantes ne permettent pas de résoudre la plupart des problèmes de taille supérieure à 30. Ainsi, des applications pratiques, comme celle du placement des circuits électroniques, requièrent souvent de placer plus d'une centaine d'éléments. D'ailleurs, c'est pour cette raison que de nombreuses méthodes approchées furent adaptées pour résoudre le problème d'affectation quadratique. Parmi ces adaptations, on trouve des méta-heuristiques, telles
que l'algorithme à colonie de fourmis, le recuit simulé, les algorithmes génétiques et la recherche avec tabou.
Dans ce projet, afin de résoudre le problème d'affectation quadratique, la présentation de la conception d' un algorithme de résolution basé sur une hybridation de deux méta-heuristiques sera élaborée : l'algorithme à colonies de fourmis et une variante du recuit simulé (algorithme à plafond dégradé).
1.5.2 Présentation du problème d'affectation quadratique
Le problème d'affectation quadratique est un problème classique d'optimisation combinatoire dans lequel il convient de trouver le placement optimal de n objets ' 'usines, matériels'' sur n locations, tout en minimisant le coût qui dépend à la fois des distances
inter locations et des flux inter objets. Il s'agit de trouver l'affectation qui permettra de minimiser le coût total.
Dans l'exemple qui suit (figurel.9) on dispose de six zones et d'un ensemble six objets. Le but est d'affecter l'ensemble des objets à l'ensemble des zones tout en minimisant la fonction objective qui présente le coût total engendré.
1
2
3
0
'
-4
5
6
D
•
0
Fig.l.JO- Exemple d'emplacements et affectation des équipements aux emplacements
Soient:
);;>
D(n
xn)
La matrice telle qued(i, J)
représente la distance entre la location i et lalocation j.
);;>
F(n
xn)
La matrice de dimension(n
xn
)telle queF(k,l)
représente le flux entreles objets k et 1.
Le problème peut alors s'écrire sous la forme suivante:
La (onction de objectif:
n-i n
Min
L
=L Lf(i,j)xd(p(i),p(j))
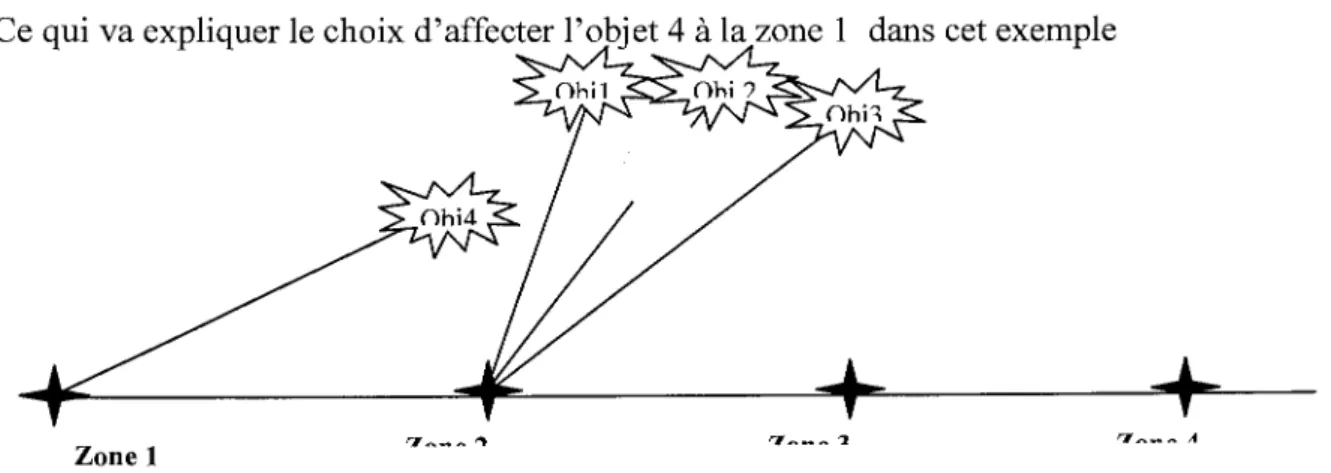
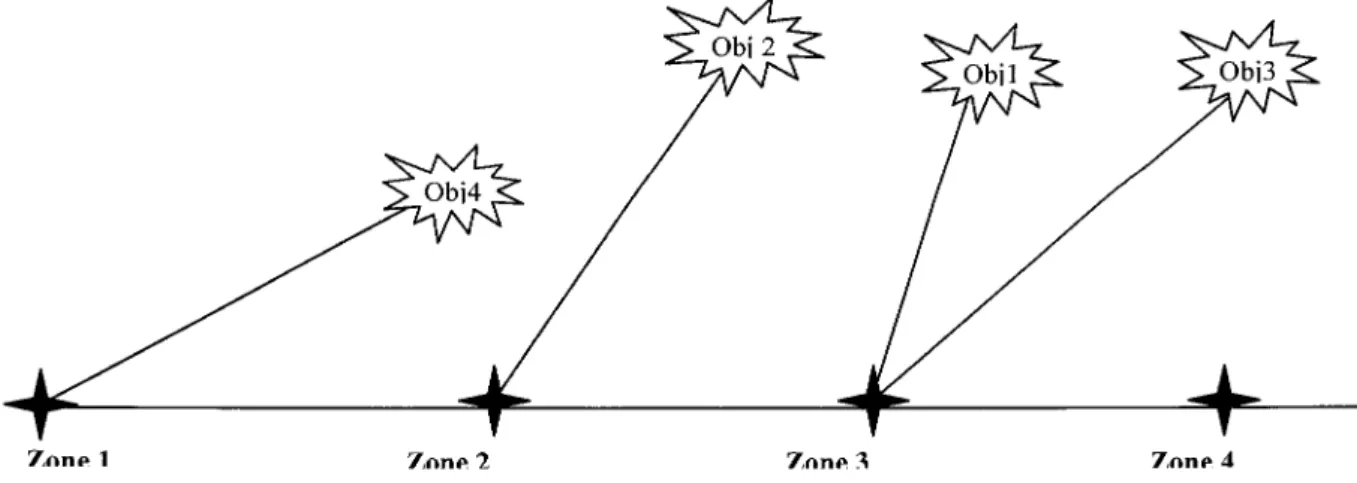
i=l j = i+1Le problème d'aménagement d'usine est formulé pour trouver l'arrangement le plus efficace des départements comme expliqués dans les schémas suivants :
CJ
~
o---.o--..6.---..l
D
D
4 emplacements 4 objets dans une chaîne de production
. . .. ... d;,j 1 2 3 4 ];,j 1 2 3 4 ~ 1 0 1 2 1 1 0 1 0 0 i 2 1 0 1 2 i 2 0 0 1 0 • 3 2 1 0 1 • 3 0 0 0 1 . 4 1 2 1 0 • 4 0 0 0 0
Matrice de distance D Matrice de flux F
Q
...
D-
f--....o
~
x
•
~
D
.6.~
'
Solution (1) Solution optimale
Fig.1.11.- Un exemple simple de l'affectation quadratique
Le coût associé à la solution (1) est :
Alors que le coût de la solution (2) est :
L =1+1+1 =3 Equ.1.5
Ceci démontre que la solution (2) est l'une des solutions optimales et alors le meilleur arrangement.
1.5.3 Applications principales
Le problème d'affectation quadratique a de très nombreuses applications en pratique, tant en informatique, qu'en productique électronique ou architecture, mais il est très délicat à résoudre.
Les applications :
•!• Les services hospitaliers :
Le problème a surgi en 1972 en tant qu'élément de la conception d'un hôpital d'université allemand, Klinikum Ratisbonne. Ce problème, connu sous le nom de Krarup30a, où 30 équipements doivent être assignés à 30 emplacements.
•!• Domaine de l'électronique:
Dans le domaine de l'électronique, le problème (PAQ) est appliqué pour optimiser le placement et le routage des circuits électroniques. Figures (1.12, 1.13)
Fig.1.12- Emplacement des composantes en désordre
f - - - r--r--
-r-- 1 ··••···.·· 1 1 ! .. ··.··.···· r - -1 11.6 CONCLUSION
L'optimisation combinatoire occupe une place très importante en recherche opérationnelle, en mathématiques discrètes et en informatique. Son importance se justifie d'une part par la grande difficulté des problèmes d'optimisation et d'autre part par de nombreuses applications pratiques pouvant être formulées sous la forme d'un problème d'optimisation combinatoire (tel que le problème d'affectation quadratique). Bien que les problèmes d'optimisation combinatoire soient souvent faciles à définir, ils sont généralement difficiles à résoudre. En effet, la plupart de ces problèmes appartiennent à la classe des problèmes NP-difficiles et ne possèdent donc pas à ce jour de solution algorithmique efficace valable pour toutes les données.
Etant donnée l'importance de ces problèmes, de nombreuses méthodes de résolution ont été développées en recherche opérationnelle et en intelligence artificielle. Ces méthodes peuvent être classées sommairement en deux grandes catégories : les méthodes exactes (complètes) qui garantissent la complétude de la résolution et les méthodes approchées (incomplètes) qui perdent la complétude pour gagner en efficacité.
Dans le deuxième chapitre du mémoire, une revue de la littérature présentera brièvement les différentes approches de résolution qui ont été proposées pour le problème d'aménagement d'usines modélisé comme un problème d'affectation quadratique. En particulier, nous nous intéresserons aux méta-heuristiques.
REVUE DE LA LITTÉRATURE
2. 1 INTRODUCTION
Le problème d' aménagement d'usines consiste à trouver l'arrangement le plus efficace de N départements indivisibles avec des conditions inégales de surface dans une usine. Comme défini dans la littérature, un tel arrangement est sujet à deux ensembles de contraintes:
o Conditions de département et de surface couverte ;
o Restrictions localisées de départements, c'est-à-dire que les départements ne peuvent pas recouvrir; ils doivent être placés dans le service et certains doivent être fixés à un endroit où ils ne peuvent pas être placés dans des régions spécifiques.
Le problème d'aménagement d'usines a été étudié intensivement dans la littérature. Pour les aperçus les plus récents, le lecteur est référé à Kusiak et Heragu et Mel/er et Gau. Nous rappelons que le problème d'aménagement d'usines est un problème d'optimisation combinatoire difficile, et que le problème d'affectation quadratique, où l'optimisation est reportée à un ensemble d'endroits possibles de département, est NP-difficile aussi. Donc, des méthodes exactes de solution sont seulement faisables pour des petits problèmes ou des problèmes considérablement limités. Pour cette raison, la plupart des méthodologies de solution dans la littérature sont basées sur des heuristiques.
En général, les problèmes de disposition de service sont trouvés dans la littérature avec l'arrangement des départements rectangulaires. Cependant, il y a des applications dans lesquelles un arrangement orthogonal des départements n'est pas nécessairement une condition (par exemple : la planification du tableau de bord d'un avion, une ville ou un voisinage, une disposition des bâtiments de bureau et les circuits intégrés). D'autre part, le problème statique de 1' aménagement "SFLP : static facility laya ut problem" est un problème bien étudié et la littérature remonte à presque cinq décennies. Récemment, une emphase particulière a été remise sur l'utilisation des heuristiques pour la résolution de ce problème d'optimisation combinatoire.
D'autre part, cette littérature est aussi la base pour résoudre le problème dynamique d'aménagement d'usines qui a commencé au milieu des années 80. Ainsi, la littérature de '' SFLP '' fut d'abord publiée et quelques années plus tard, ce fut la littérature de '' DFLP '' qui fut passée en revue.
Généralement, les méthodologies pour le problème statique d'aménagement d'usines "SFLP" peuvent être classifiées en algorithmes Exacts, donnent des solutions optimales et algorithmes heuristiques. Des algorithmes l'algorithme par séparation et
évaluation (Branch and Bound) et les plants sécants sont employés pour résoudre le SFLP. Les algorithmes par séparation et évaluation ont été développés et mis en application par Gilmore (1962), Lawler (1963), et Kaku et Thompson (1986), pour ne mentionner que
quelques-uns. Bazaraa et Sherali (1980) ont développé un algorithme utilisant des plans sécants (Cutting plane) et, plus tard, Burkard et Bonninger (1983) ont également développé des algorithmes (Cutting plane). Pour un examen des algorithmes exacts pour le "SFLP ", voir Kusiak et le Heragu (1987). Montreuil (1990) a présenté une formulation de programmation de nombre entier pour le "SFLP". De même, Heragu et Kusiak (1991) ont présenté deux nouveaux modèles pour le '' SFLP'' :
o Modèle continu ;
o Modèle linéaire en nombres entiers.
L'inconvénient principal de ces algorithmes exacts est qu'ils nécessitent des conditions informatiques lourdes même s'ils sont appliqués à des problèmes de petite taille.
Afin d'obtenir de bonnes solutions dans un temps raisonnable, des heuristiques ont été développées. Une heuristique peut être définie comme un ensemble d'étapes pour identifier rapidement des solutions de bmme qualité.
La qualité d'une solution est définie par un critère d'évaluation (par exemple, minimiser le coût de manutention matérielle) et la solution doit satisfaire les contraintes du problème.
Fondamentalement, les algorithmes heuristiques pour le " SFLP " peuvent être classifiés selon quatre classes, Heragu, (199 2):
o Algorithmes graphique ; o Algorithmes constructifs ; o Algorithmes d'amélioration ; o Algorithmes hybrides.
La section 2. 3 est consacrée aux algorithmes heuristiques, alors que la prochaine
section présente des algorithmes exacts auparavant utilisées pour résoudre le problème d ' aménagement d ' usines.
2.2 ALGORITHMES EXACTS
Les méthodes optimales de résolution sont des approches qui permettent d ' obtenir la meilleure solution à un problème selon un ensemble de critères. Les logiciels commerciaux, tel que CPLEX, contiennent un ensemble de ces méthodes de résolution.
En faisant face au problème d'aménagement d'usines, quelques algorithmes exacts ont été proposés: Gilmore (1962), Lawler (1963), Seppanen et Moore (1970), Foulds et Robinson (1976), Kaku et Thompson (1986) et Ketcham (1992).
Un algorithme exact peut donner une meilleure solution pour un problème donné ; il peut être divisé en deux classes :
o L'algorithme par séparation et évaluation (Branch and bound ); o Les plans sécants (cutting plane).
2.2.1 Les algorithmes par séparation et évaluation Branch and Bound
Selon le terme anglo-saxon, un algorithme par séparation et évaluation est également appelé Branch et Bound (B&B). C'est une méthode générique de résolution de problèmes d'optimisation et plus particulièrement d'optimisation combinatoire ou discrète. Elle a été introduite pour la première fois par A. H Land et A. G. Drigo (1960) qui l'avaient décrite comme une méthode de construction d'un arbre de décision. Elle permet de résoudre les problèmes en nombres entiers dans plusieurs logiciels commerciaux.
Dans les méthodes par séparation et évaluation, la séparation permet d'obtenir une méthode générique pour énumérer toutes les solutions tandis que l'évaluation évite l'énumération systématique de toutes les solutions.
l_
Si tout le nombre de solutions faisables pour le problème à résoudre est petit, nous pouvons étudier chaque solution faisable individuellement et choisir l'optimum en les comparant l'un par rapport à l'autre. Cependant, dans la plupart des situations réelles, une telle méthode d'énumération totale est impraticable, car le nombre de solutions s'avère être très grand. L'algorithme B&B fournit une méthode pour rechercher une solution optimale en conduisant une énumération qui n'est pas une énumération totale. L'ensemble de solutions faisables est divisé en plusieurs sous-ensembles simples. Dans chaque étape, un sous-ensemble prometteur est choisi et un effort est fait pour trouver la meilleure solution pour lui. Si la solution obtenue est la meilleure jusqu'ici, alors nous mettons à jour la limite. Autrement, nous devons encore diviser ce sous-ensemble en deux sous-ensembles simples ou plus et que le même processus soit répété jusqu'à ce que la meilleure solution soit obtenue.
Un algorithme général de B&B peut être énoncé comme suit:
•!• Étape 1: Résoudre une relaxation (détendez les contraintes ou les variables de restrictions) du problème original. Ceci donne une limite supérieure. Si la solution est intégrale, ARRÊT.
•!• Étape 2:
•!• Étape 3:
produit:
Créer deux nouveaux sous-problèmes en s'embranchant sur une variable partielle.
Un sous-problème n'est plus en activité si l'un des points suivants se
•!• Étape 4:
../ Toutes les variables dans la solution sont des nombres entiers; ../ Le sous-problème n'est pas faisable;
../ Le sous-problème est sondé (terminé) par un argument de bondissement.
Choisir un sous-problème actif et le relier à une variable partielle. Répéter jusqu'à ce qu'il n'y ait aucun sous-problème actif.
L'exécution de la branche et de la méthode attachée est facilitée par le calcul d'une limite dans chaque sous-ensemble de la partition produite. Ces limites sont employées en choisissant les sous-ensembles prometteurs dans la recherche pour l'optimum et pour éliminer quelques sous-ensembles qui ne peuvent probablement pas contenir la solution faisable optimale. Dans les problèmes de minimisation, des limites inférieures peuvent être employées pour décider si nous exécutons l'embranchement à un certain nœud dans l'arbre de recherche. Si nous avons une limite inférieure pour un sous-ensemble qui est supérieur ou égal à la limite supérieure courante, il n'y a pas d' avantage à l'embranchement dans ce nœud.
La réussite de la méthode de B&B dépend de la stratégie d'embranchement, de la stratégie de recherche et de la qualité de la limite inférieure (dans la maximisation) ou des limites supérieures (dans la minimisation) produites. Dans cette technique de recherche, un sous-ensemble choisi parmi la liste active est exploré jusqu'à ce qu' une solution faisable améliorée ou une violation de la limite inférieure soit trouvée. Un autre sous-ensemble est
choisi si la solution n'est pas faisable. Nous relions alors le nœud parent dans la branche où l'exploration n'a pas été faite. Des limites inférieures peuvent être obtenues à chaque nœud en employant une méthode heuristique. Dans la méthode de B&B, une recherche alternative dans laquelle le sous-ensemble avec la plus basse limite (LB) choisie pour s'embrancher est la meilleure.
Des algorithmes de B&B ont été développés la première fois par Gilmore (1962) et Lawler (1963) pour résoudre le QAP. Ces deux algorithmes affectent un service simple à
un endroit simple et calculent toutes les solutions potentielles ainsi que les limites inférieures.
Différent de Gilmore (1962) et de Lawler (1963); Land (1963), Cravett et Plyter (1966) ont proposé l'algorithme par séparation et évaluation pour affecter des paires d'équipements aux paires d'endroits.
Pierce et Crowston (1971) ont proposé un algorithme qui procède sur la base de
l'exclusion étape par étape des paires de tâches d'une solution aux problèmes basés sur le concept de la réduction carrée de forces. Burkard (1973) a développé un algorithme exact pour résoudre le QAP. Dans cet algorithme, une matrice est transformée en une autre matrice de sorte que la matrice résultante ait seulement les éléments non négatifs, et que dans chaque rangée et colonne, il y ait au moins un élément zéro.
Dans l'algorithme de Branch and Bound développé par Bazaraa (1975), un arrangement partiel à chaque étape est construit et une limite pour tous les
accomplissements possibles de cet arrangement partiel existant est calculée. La disposition partielle existante est alors développée en assignant un nouveau service à condition que la tâche choisie ait un meilleur avantage comparé à la limite courante. Si la tâche a pour conséquence un avantage inférieur, une autre recherche est considérée. Si c'est le cas, une nouvelle tâche différente doit être trouvée. Le processus est suivi jusqu'à ce que l'arrangement complet soit obtenu. Bazzara et Elshafei (1979) ont proposé l'algorithme par séparation et évaluation (Branch and Bound) basé sur l'attribution étape par étape des équipements simples aux endroits inoccupés pour le QAP .
2.2.2 Les plans sécants
Il y a une alternative de 1' algorithme par séparation et évaluation nommée les plans sécants qui peut également être employée pour résoudre des programmes de nombre entier.
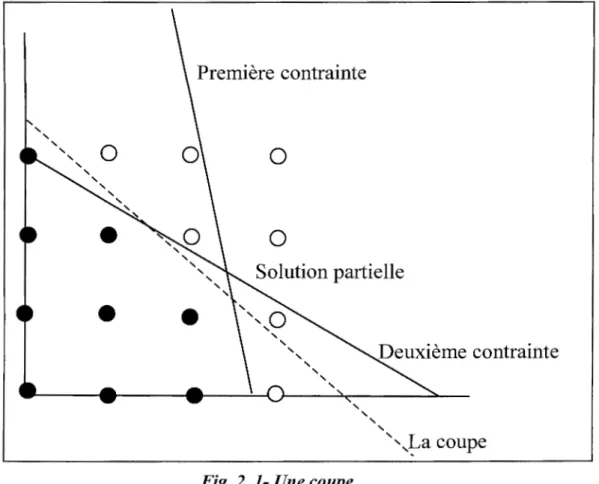
L'idée fondamentale derrière ces plans sécants est d'ajouter des contraintes à un programme linéaire jusqu'à ce que la solution faisable de base optimale prenne des valeurs de nombre entier. Naturellement, nous devons faire attention que les contraintes ajoutées ne changent pas le problème. Nous ajouterons un type spécial de contrainte appelé coupe.
Une coupe, relativement à une solution partielle courante, satisfait aux critères suivants:
o Chaque solution faisable de nombre entier est faisable pour la coupe ; o La solution partielle courante n'est pas faisable pour la coupe.
Ceci est illustré sur le schéma qui suit :
Première contrainte
0
•
'<:0
''
'' '
' ' '•
•
Fig. 2. 1- Une coupe
Il y a deux manières de produire des coupes. La première, appelée les coupes de Gomory, produit des coupes de n'importe quel tableau de programmation linéaire. Ceci a l'avantage de «résoudre » n'importe lequel problème, mais a l'inconvénient que cette méthode peut être très lente. La deuxième approche est d'employer la structure du problème pour produire des coupes très bonnes. L'approche a besoin d'une analyse de problème par problème, mais peut fournir des techniques de solutions très efficaces.
L'algorithme plans sécants (Cutting plane) (CP) résout des programmes linéaires de nombres entiers en modifiant les solutions de programmation des problèmes détendus,
jusqu'à ce qu'une solution de nombre entier soit obtenue. Cet algorithme raffine un programme linéaire simple en ajoutant de nouvelles contraintes successivement de sorte que la région faisable soit réduite, et ce, jusqu'à ce qu'une solution optimale de nombre entier soit trouvée.
Basés sur la technique de division, Bazaraa et Sherali (1990) ont proposé un algorithme plan sécant (Cutting plane). En employant cette technique, un programme mélangé de nombres entiers est décomposé en ses nombres entiers et des parties continues, dont chacune peut être résolue par un algorithme spécialisé approprié dans la programmation mathématique. L'algorithme Cutting plane est également employé pour résoudre le QAP (Bukard et Bonninger, 1983). Kusiak et Herugu (1987) ont indiqué que la méthode plans sécants est complexe et qu'elle a un grand temps de résolution. Par exemple, le plus grand aménagement résolu en employant la méthode Cutting plan est le problème d'aménagement avec huit (8) équipements.
2.2.3 Algorithmes graphiques
Seppanen et Moore (1970) ont présenté les concepts de la théorie de graphes
appliqués à la conception d'aménagement. Hassan et Hogg (1989) décrivent l'approche de graphique dans trois étapes: Dans la première étape, un graphique de contiguïté (également appelé un graphique planaire maximal) est développé à partir des rapports entre les
départements; le graphique duel des rapports départementaux est construit dans la deuxième étape; et la troisième étape convertit le graphique duel en disposition de bloc (Hassan et le Hogg, 1987). Des algorithmes de la théorie de graphes ont été développés
dans les articles de Seppannen et Moore (1975), Foulds et Robinson (1976), Foulds et Robinson (1978), Carrie et autres (1978), Montreuil et autres (1987), Goetschalckx
(1992), et Eades et autres (1982). Un examen des algorithmes de la théorie de graphes est présenté dans Hassan et Hogg (1987) . Le procédé de graphique ne garantit pas que les départements ayant des liens forts seront adjacents (Hassan et Hogg, 1987). Ajouté à la limitation ci-dessus, il peut produire des départements irréguliers de forme.
2.2.4 Algorithmes de construction
Un algorithme de construction se compose du choix et du placement successifs des départements jusqu'à ce qu'une conception de disposition soit réalisée. Certains des algorithmes de construction sont : HC66 (Hillier et Connors, 1966), ALDEP (Seehof et Evans, 1967), CORELAP (Lee et Moore , 1967), RMA Comp I (Muther et McPherson,
1970), MAT (Edwards et autres, 1970), PLANETE (Deisenroth et Apple, 1972), LSP (Zoller et Adendorff, 1972), algorithme linéaire (Neghabat, 1974), FATE (Black, 1978),
INLAYT (O'brien et Abdel Barr, 1980), SHAPE (Hassan et autres, 1986), NLT (Van Camp et autres, 1991), et QLAARP (Banerjee et autres, 1992). Ces algorithmes peuvent
2.3
LES DIFFÉRENTS TYPES DE MÉTAHEURIST/QUES
2.3.1 Les approches de recherche locale
Les méthodes de recherche locale sont des algorithmes itératifs qui explorent l 'espace "X" en se déplaçant pas à pas d'une solution à une autre. Une méthode de ce type débute à partir d'une solution "s0 EX" choisie arbitrairement. Le passage d'une solution admissible à une autre se fait sur la base d' un ensemble de modifications élémentaires '' L1 "qu'il s'agit de définir de cas en cas. Une solution " s' " obtenue à partir de " s "en appliquant une modification ''
o
E L1 '' est noté '' s'= s ffio ''.
Le voisinage '' N(s) ''d'une solution " sE X " est défini comme l'ensemble des solutions admissibles atteignables depuis '' s '' en effectuant des modifications élémentaires ''
o ''
On peut écrire la relation suivante :
N(s )= {s'E
Xj35
E Ll:s'=
s
EB 5}
Equ. 2.1Un tel processus d'exploration est interrompu lorsqu'un ou plusieurs critères d'arrêt sont satisfaits.
Fig.2.2 - Exploration de X par une approche de recherche locale
Des méthodes de recherche locale plus sophistiquées ont été développées au cours de ces vingt dernières années. Ces méthodes acceptent des solutions voisines moins bonnes que la solution courante afin d'échapper aux minima locaux de la fonction. En règle
générale, seule une portion du voisinage courant est explorée à chaque étape. Les méthodes les plus connues seront présentées dans les sections suivantes.
2.3.1.1 Le recuit simulé
Le recuit simulé est une méta-heuristique inspirée d'un processus utilisé en métallurgie. Ce processus alterne des cycles de refroidissement lent et de réchauffage (recuit) qui tendent à minimiser l'énergie du matériau. Elle est aujourd'hui utilisée en
optimisation pour trouver les extrema d' une fonction . Elle a été mise au point par trois chercheurs de la société IBM S. Kirkpatrick, C.D. Gelatt et MP. Vecchi, en 1983, et indépendamment par V Cerny en 1985.
Afin de transposer les propriétés physiques aux problèmes d'optimisation, on établit l'analogie présentée dans le Tableau 2.1.
Fonction objective Énergie libre
Paramètres du problème Coordonnées des particules La configuration optimale Trouver les états de basse énergie Tableau 2. ]-Analogie entre un problème d'optimisation et un système physique
L'algorithme du recuit simulé s'appuie sur deux résultats de la physique statistique. D'une part, lorsque l'équilibre thermodynamique est atteint à une température donnée (T), la probabilité pour un système physique de posséder une énergie donnée (E) est
proportionnelle au facteur de Boltzmann : e
D'autre part, pour simuler l'évolution d'un système physique vers son équilibre thermodynamique à une température donnée (T), on peut utiliser 1' algorithme de Metropolis partant d'une configuration donnée (dans notre cas un placement), on fait
subir au système une modification élémentaire (échange deux composants). Si cette transformation a pour effet de diminuer la fonction objective (ou énergie ) du système,
elle est acceptée; si elle provoque, au contraire, une augmentation !::.E de la fonction
-DE
objective, elle est tout de même acceptée, mais avec la probabilité de e r (en pratique cette condition est réalisée de la manière suivante : on tire au hasard un nombre réel compris entre 0 et 1, et on accepte la configuration dégradant de ilE la fonction
- DE
objective, si le nombre tiré est inférieur ou égal à e T ). L'itération se poursuit tant que
l'énergie du système diminue. Lorsque l'énergie reste stationnaire, on diminue un peu la température et l'on reprend le processus de décroissance de l'énergie. On arrête lorsque les diminutions de température restent inefficaces.
Dans la recherche locale, lorsque nous cherchons une solution et nous restons emprisonné dans une région probablement inférieure, il n'y a aucune manière de sortir de cette région et de rechercher d'autres solutions dans différentes régions.
La méthode du recuit simulé (SA) est employée pour résoudre le problème d'aménagement d'usines. On commence par une solution initiale et on fait une recherche locale pour trouver une solution améliorée. SA peut rechercher d'autres solutions dans différentes régions, lorsqu'une recherche locale est emprisonnée dans une région probablement inférieure ou quand il n'y a aucune manière de s'échapper de cette région en laissant le procédé se déplacer à une meilleure solution. Dans l'algorithme de recuit simulé, si la nouvelle valeur de la fonction objective est meilleure que celle de la précédente, la nouvelle solution remplace la solution courante. Quand la nouvelle solution
a une valeur non meilleure que la précédente, la nouvelle solution peut être acceptée selon une certaine probabilité.
Algorithme :
Initialisation
Choisir une solution initiale s E X ; s. : = 0;
K: = 0;
nouveau_ cycle : = vrai ;
t: =t0 ;
Processus itératif
(compteur d'itérations globales)
(variable booléenne indiquant s'il vaut la peine d'effectuer un nouveau cycle d'itérations)
(t0 =température initiale du système)
tant que nouveau_cycle = vrai faire
nbiter: = 0; (compteur il" itérations interne à un cycle)
nouveau_cycle := faux;
tant que (nbiter < nbiter_cycle) faire k: = k + 1; nbiter: = nbiter + 1;
générer une solution s' E N ( s) aléatoirement;
!'J.f :=/(s')-f(s);
si !'J.f(O alors s :=s' ; nouveau_cycle: =vrai;
sinon
prob(!'J.f,t):= exp(_!'::,./{);
générer q uniformément dans l'intervalle
[0 1[ ;
si q(prob(!'J.f,t) alors s: =s' ; nouveau_cycle :=vrai;
si f(s)(f(s*)alorss· :=s;
t:=a.t ( 0 (a (