COMMUNAUTE FRANCAISE DE BELGIQUE ACADEMIE UNIVERSITAIRE WALLONIE-EUROPE UNIVERSITE DE LIEGE - GEMBLOUX AGRO-BIO TECH
UNIVERSITÉ PARIS-EST ÉCOLE DOCTORALE MSTIC
Thèse de doctorat
Application des techniques de photogrammétrie
par drone à la caractérisation des ressources
forestières
LISEIN Jonathan
Essai présenté en vue de l'obtention du grade
de docteur en sciences agronomiques et ingénierie biologique
Soutenue publiquement le 15 décembre 2016 devant le jury composé de :
M. Laurent POLIDORI CESBIO Rapporteur
M. Cédric VEGA IGN Rapporteur
M. Philippe LEJEUNE Ulg-Gembloux ABT Directeur de thèse
M. Marc PIERROT-DESEILLIGNY ENSG – Paris-Est Directeur de thèse
M. Hugues Claessens Ulg-Gembloux ABT Examinateur
Mm. Aurore Degré Ulg-Gembloux ABT Examinateur
COMMUNAUTE FRANCAISE DE BELGIQUE ACADEMIE UNIVERSITAIRE WALLONIE-EUROPE UNIVERSITE DE LIEGE - GEMBLOUX AGRO-BIO TECH
UNIVERSITÉ PARIS-EST ÉCOLE DOCTORALE MSTIC
Thèse de doctorat
Application des techniques de photogrammétrie
par drone à la caractérisation des ressources
forestières
LISEIN Jonathan
Essai présenté en vue de l'obtention du grade
de docteur en sciences agronomiques et ingénierie biologique
Soutenue publiquement le 15 décembre 2016 devant le jury composé de :
M. Laurent POLIDORI CESBIO Rapporteur
M. Cédric VEGA IGN Rapporteur
M. Philippe LEJEUNE Ulg-Gembloux ABT Directeur de thèse
M. Marc PIERROT-DESEILLIGNY ENSG – Paris-Est Directeur de thèse
M. Hugues Claessens Ulg-Gembloux ABT Examinateur
Mm. Aurore Degré Ulg-Gembloux ABT Examinateur
par drone à la caractérisation des ressources forestières (Thèse de doctorat). cotutelle Université de Liège – Gembloux Agro-Bio Tech et Université Paris-Est, 96 p., 11 tabl. 23 fig.
R É S U M É
Une gestion raisonnée et multifonctionnelle des forêts n’est possible qu’avec une description à jour de l’état de la ressource naturelle. Les inventaires forestiers traditionnels, réalisés sur le terrain, sont couteux et ne couvrent qu’un échantillonnage de la surface boisée. L’essor des drones civils pour la cartographie a initié une révolution dans le domaine de la télédétection environnementale. La polyvalence et la diversité des systèmes drones sont une aubaine pour la foresterie de précision. Ceux-ci sont utilisés pour la réa-lisation de cartographie très fine des habitats naturels avec une résolution temporelle et spatiale sans précédent.
Nous explorons les possibilités d’utilisation de mini-drones pour la carac-térisation quantitative et qualitative de la ressource forestière. Nous nous intéressons en particulier à l’estimation de la hauteur des arbres et à la carac-térisation de la composition spécifique au sein de peuplements forestiers. La hauteur de la canopée est une variable dendrométrique de première impor-tance : elle est un bon indicateur du stade de développement des peuplements et intervient notamment dans les estimations de biomasse ou de niveau de productivité. La composition spécifique est une information essentielle en re-gard des principales fonctions que remplit la forêt (conservation, production, récréation, etc). Nous avons comparé l’estimation de la hauteur des peuple-ments à partir de mesures LiDAR et celle obtenue par photogrammétrie. Bien que permettant une mesure de hauteur individuelle avec une incertitude de l’ordre de 1.04 m (RMSE) en feuillus, la photogrammétrie par drone sur des zones forestières est systématiquement moins précise que les mesures par LiDAR (RMSE de 0.83 m). Ces résultats sont cependant prometteurs, étant donné que la mesure sur terrain de la hauteur totale des arbres est égale-ment sujette à une importante imprécision. De plus, la grande flexibilité que confère les petits drones permet d’acquérir, au moment propice du stade de végétation, et l’information de relief de la canopée, et l’information spectrale. La période de fin de feuillaison, au début du mois de juin, s’est avérée le moment le plus propice à une discrimination automatique de cinq groupes d’essences feuillues (le chênes pédonculé, les bouleaux, l’érable sycomore, le frêne commun et les peupliers). Une erreur globale de classification des houp-piers de 16% est obtenue avec des acquisitions monotemporelles, alors que l’utilisation d’images acquises à différentes dates permet encore d’améliorer cette classification (erreur globale de classification de 9% pour la meilleure combinaison de 3 dates).
Les contraintes de la législation régissant l’utilisation des aéronefs sans pilote à bord restreignent le champs d’action des drones civils. Ainsi, afin
male du télépilote, ce qui ne permet pas une utilisation optimale de cette technologie pour la couverture de grands domaines forestiers (plusieurs mil-liers d’hectares). De plus, d’autres outils de télédétection utilisés en foresterie, tels que le LiDAR et l’imagerie satellite et aéroportée, sont plus compétitifs que les drones dès qu’il s’agit de couvrir de grandes surfaces (plusieurs mil-liers d’hectacre). C’est pourquoi nous pensons que les drones resterons un outils d’analyse de petites surfaces (dizaines voire centaines d’hectares), plus utiles à des fins de recherches scientifiques qu’à une utilisation en gestion forestière.
of forest ecosystem ressources (PhD thesis in french). cotutelle Université de Liège – Gembloux Agro-Bio Tech et Université Paris-Est, 96 p., 11 tabl. 23 fig. S U M M A R Y
The recent development of operational small unmanned aerial systems (UASs) opens the door for their extensive use in forest mapping, as both the spatial and temporal resolution of UAS imagery better suit local-scale investigation than traditional remote sensing tools. Along with this rising use of drones, dense three-dimensional reconstruction through the combined use of pho-togrammetry and Structure from Motion techniques enables now the fine modelization of the canopy surface relief from a set of overlapping images. Forest management is evolving and has to cope with numerous news de-mands. A sustainable managemnent practice requires beforehand up-to-date and comprehenvise forest inventory. Traditionnal forest ressources inven-tories are carried out on the field. They are expensive and focus only on an sample of the forest. Information is delivered at the stand level, and specific measurements for individual tree is missing. The use of mapping drones can potentially changes the story by describing forest ecosystems on a tree-level. This thesis aims at investigating the use of unmanned aerial systems for the characterization of temperate forests (in Wallonia, Belgium). Firstly, mode-lization of the vegetation heigth also is investigated by the combinaison of photogrammetric canopy surface measurements with digital terrain elevation acquired by LiDAR. Secondly, the study of a time series of 20 drone fligths through the growing season enables to determine when is the optimal period for automatic classification of deciduous species.
Photogrammetric measurements of individual deciduous tree heigth are al-ways less precise than high density LiDAR measurements (RMSE of 1.04 m versus 0.83 m for the latter). Nevertheless, this presicion is considered as good, regarding that the measurement of tree height on the field is even more imprecise. Moreover, the versatility of drones is far higher than LiDAR data, with the possibility of flying at the appropriate time and delivering both spectral and 3D information with a very high resolution. Spetral information is relevant among other for tree species identification. The optimal phenology state for the discrimination of deciduous species was demonstrated to be the end of leaf flush. The intra-species phenology is indeed well synchronized during this time windows ranging from late spring to early summer. A global classification error of 16% is reached by using single date UAS imagery, and multitemporal UAS acquisitions still improve the process of species discrimi-nation (up to 9% of global error for 3 dates combidiscrimi-nation).
Altough precision forestry can largely benefits from UAS technology, legis-lation constraints limit the operationnal use of drones. Thus, UAS flights are most of the time restricted under a specific altitude and within a certain distance from the remote pilot. These constraints are sub-optimal for the mapping of forest, which requires beyond line of sigth fligth at relatively high altitude. Moreover, others remote sensing technologies as airborne laser
surface to cover exceeds a few thousands of hectares. We thus believe that the drone technology will be more developped for scientific investigations at a local scale (dozens or hundreds of hectares) than for forest inventory of large forest estate.
et les droits voisins seul l’auteur a le droit de reproduire partiellement ou complètement cet ouvrage de quelque façon et forme que ce soit ou d’en autoriser la reproduction partielle ou complète de quelque manière et sous quelque forme que ce soit. Toute photocopie ou reproduction sous autre forme est donc faite en violation de la dite loi et des modifications ultérieures.
Gembloux, le 7/05/15 J’aimerais profiter de ce paragraphe dédié aux remerciements pour mettre en contexte la réalisation de ce présent doctorat. Cette thèse ayant été réalisée en cotutelle entre une institution belge, l’Université de Liège, et une institution française, l’Ecole Nationale des Sciences Géographiques, j’ai eu la chance de bénéficier de l’encadrement de deux équipes distinctes.
Du côté Belge, mon promoteur le Professeur Philippe Lejeune est la personne qui m’a introduit dans le monde de la télédétection, et du même coup dans le monde de la recherche scientifique. Son enthousiasme débordant fut une source d’inspiration inépuisable, et le mot est faible. La confiance fut réci-proque tout au long de la thèse, et l’esprit d’initiative toujours mis à l’honneur dans nos échanges. La liberté dont j’ai bénéficié fut parfois déstabilisante, mais très formatrice. Mon encadrement par le professeur Cédric Vermeulen pour l’ingénierie de publication fut également des plus utiles, en particulier en début de thèse, et je l’en remercie tout spécialement. L’aide au niveau statistique apportée par Yves Brostaux et l’expertise forestière de Hugues Claessens m’ont permis de lier mes recherches consacrées à l’outil "drone" avec celles touchant à une thématique plus forestière (ex : autécologie, sylvi-culture, etc.). Je les en remercie également tout spécialement. Les nombreuses aides spécifiques et les divers échanges avec les membres du groupe de travail ’télédétection’ de l’unité de Gestion des Ressources forestières et des Milieux naturels (renommé récemment "Axe Gestion des Ressources forestières") m’ont permis d’aboutir à la maîtrise d’outils et de techniques très diversifiés, sans lesquels le déroulement de cette thèse aurait été tout autre. Les pilotes de drone de l’unité eurent quant à eux un effet de ciment qui m’a permis de ne jamais succomber à la fatigue durant toutes ces heures passées derrière un ordinateur. Nos sorties sur le terrain ont souvent été vécues avec l’excita-tion des vols réussis ou échoués, mais aussi avec une agréable détente , en
mesures forestières, l’aide et la compagnie des techniciens forestiers furent remarquables. Je remercie ainsi vivement toutes les personnes mentionnées ci-dessus de l’équipe gembloutoise de télédétection (Stéphanie Bonnet, Adrien Michez, Sébastien Bauwens, François Toromanoff dit Toto, et Laurent Dedry), les droneurs (Cédric Geerts, Alain Monseur, Philippe Bouché, Julie Linchant, Power Cycle !), l’équipe de geek (Gauthier Ligot et Samuel Quevauvillers) et les forestiers (Coralie Mengal et Frédérick Henrotay). Enfin, je remercie le ciment de l’unité, nos secrétaires Marie Fombona et Marie-Ange Golard, pour tout leur travail laborieux et silencieux. Pour finir, je remercie Philippe Lejeune pour avoir obtenu l’appui financier de l’Accord-Cadre de recherches et de vulgarisation forestière qui a permis le financement des 6 derniers mois de cette thèse.
Du côté français, , je tiens à remercier tout particulièrement mon co-promoteur, le Professeur Marc Pierrot-Deseilligny, qui a été un guide incroyable pour tout ce qui relève de la photogrammétrie, de l’utilisation, conception et pro-motion de logiciels libres. J’ai même fini par adopté ce système d’exploitation dont le logo est un pingouin. Sa manière de travailler est plus qu’une attitude professionnelle, c’est avant tout une philosophie. Une philosophie que je partage et qui me donne foi en la science. L’accueil qui m’a été fait lors de mes nombreux courts séjours à Marne-la-Vallée fut toujours chaleureux et très enrichissant. L’équipe de l’Ecole Nationale des Sciences Géographiques m’a permis de mettre en perspective mon travail, et les avancées de tout un chacun sur certains protocoles photogrammétriques et/ou outils de la suite Micmac m’ont été très bénéfiques. Je remercie ainsi vivement Vincent Tournadre et Charline, Mehdi Daakir, Ana-Maria Rosu et Sylvie Cach. Je remercie également l’ensemble des membres de mon comité de thèse pour leur accompagnement. Merci à M. Laurent Polidori et M. Cédric Véga d’avoir joué le rôle de rapporteurs. Je remercie également Hugues Dorchy pour ses conseils avisés, les membres de l’entreprise Gatewing pour leur formation et leur aide et Alexey Pasumansky d’Agisoft Photoscan pour avoir répondu à mes demandes.
Pour terminer, je remercie tous mes proches pour avoir supporté mes sautes d’humeur durant ce long travail et, en particulier, ma compagne Géraldine Le Mire pour son aide concernant l’utilisation de l’anglais, ainsi que mes colocataires pour tous ces bons moments partagés ensemble.
1 introduction 1
1.1 Contexte . . . 1
1.2 Objectif et structure de la thèse . . . 4
1.3 Travaux connexes à la thèse . . . 6
1.4 Les drones pour la cartographie . . . 7
1.4.1 Les types de châssis et leurs usages en foresterie . . . 8
1.4.2 Les images aériennes acquises par drone . . . 10
1.4.3 La photogrammétrie au départ d’imagerie drone . . . 12
1.4.4 Les capteurs utilisés pour nos travaux . . . 12
1.5 Le LiDAR aérien . . . 14
2 a photogrammetric workflow for the creation of a forest canopy height model from small unmanned ae-rial system imagery 17 2.1 Introduction . . . 17
2.2 Material and Methods . . . 20
2.2.1 Study Site and Field Measurements . . . 20
2.2.2 Unmanned Aerial System Survey . . . 21
2.2.3 LiDAR Data . . . 22
2.2.4 Photogrammetric Workflow . . . 23
2.2.5 Investigation of Photo-CHM Quality . . . 26
2.3 Results . . . 28
2.3.1 Photo-DSM Generation . . . 28
2.3.2 Investigation of Photo-CHM Quality . . . 30
2.4 Conclusions and Perspectives . . . 35
2.5 Supplementary material . . . 38
3 modélisation de la canopée forestière par photogram-métrie depuis des images acquises par drone 39 3.1 Introduction . . . 40
3.2 Objectifs . . . 42
3.3 Matériel et Méthode . . . 42
3.3.1 La zone d’étude, le vecteur et le capteur d’acquisition . . . 42
3.3.2 Le calcul des éléments d’orientation du bloc d’images . . . 44
3.3.3 Les stratégies de corrélation dense . . . 48
3.3.4 Utilisation du modèle numérique de canopée pour la pré-diction de la hauteur dominante . . . 50
3.4 Résultats et Conclusion . . . 51
3.4.1 Acquisitions par drone . . . 51
3.4.2 Modélisation de la canopée par photogrammétrie . . . 53
3.4.3 Inventaire à deux phases de la hauteur dominante . . . 55
4 discrimination of deciduous tree species from time
series of unmanned aerial system imagery 57
4.1 Abstract . . . 57
4.2 Introduction . . . 57
4.2.1 Context . . . 57
4.2.2 Discrimination of forest species by remote sensing . . . . 58
4.2.3 Objectives . . . 60
4.3 Material and Methods . . . 61
4.3.1 The study site . . . 61
4.3.2 Unmanned Aerial System survey . . . 61
4.3.3 Field inventory and species phenology . . . 66
4.3.4 Classification of tree species using Random Forest . . . 67
4.4 Results and discussion . . . 69
4.4.1 The time series of orthophotomosaics . . . 69
4.4.2 Classification of tree species . . . 69
4.5 Conclusions and Perspectives . . . 74
4.5.1 UAS operations and orthophotomosaic generation . . . 74
4.5.2 Classification of species groups . . . 75
4.5.3 Perspectives . . . 76
4.6 Supporting Information Legends . . . 77
5 conclusion et perspectives 79 5.1 Conclusion . . . 79
5.1.1 Comment et avec quelle précision peut-on mesurer la hauteur des arbres à partir d’imagerie aérienne à très haute résolution ? . . . 81
5.1.2 Comment et avec quelle précision discriminer les es-sences forestières via l’information spectrale de mosaïques d’ortho-images ? . . . 82
5.1.3 Comment utiliser les techniques de photogrammétrie avec un drone pour la caractérisation de la ressource forestière . . . 83
5.2 Perspectives . . . 84
Figure 1 Exemple d’utilisation d’imagerie drone en foresterie : suivi de la défoliation du frêne atteint de Chalarose
(Cha-lara fraxinea). La très haute résolution des images
per-met d’apprécier le degré de défoliation (chiffre indiqué
en rouge). . . 4
Figure 2 Les deux catégories les plus courantes de châssis drones
sont les drones à voilure tournante (drone à rotors de type hélicoptère) et les drones à voilure fixe (type aile volante ou planeur). Sur l’image à droite, le modèle
Ga-tewing X100 et à gauche, le modèle GX8. . . 8
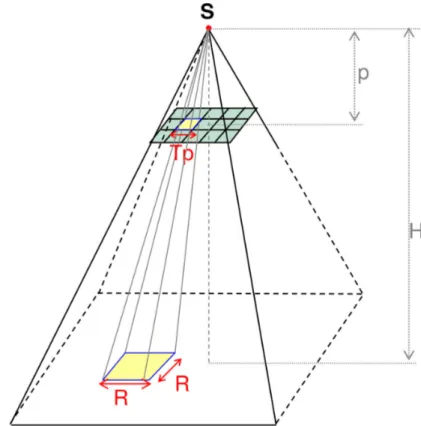
Figure 3 Géométrie d’une image isolée, d’aprèsPinte(2014). Les
drones volent à basse altitude, la résolution des images en est donc très fine mais la fauchée (emprise) des images est réduite. S : Sommet de prise de vue, Tp : Taille du photosite, R : La résolution de l’image, mesurée par la distance d’échantillonnage au sol, H : Hauteur de vol, p : distance focale. La résolution R est fonction de la hauteur de vol et de la focale, suivant la relation
R = H
p[pixels]. La fauchée de l’image, représentée par
le rectangle en pointillé projeté au sol, est fonction de l’altitude de vol, de la taille du capteur et de la distance
focale. . . 11
Figure 4 Représentation schématique des filtres (lignes) et de la
sensibilité spectrale des canaux (surfaces) pour l’appareil photographique RGB (au-dessus) et l’appareil photogra-phique adapté pour le proche infra-rouge (en dessous). L’utilisation à tour de rôle (deux vols séparés) des deux appareils photographiques permet théoriquement le cal-cul d’indice de végétation basé sur le rouge (au-dessus) et le proche infra-rouge (en-dessous, surface bleue), comme
illustré sur le graphique de droite. Schéma adapté de
Ni-jland et al.(2014). . . 13
Figure 5 Illustration de la résolution et de la largeur de la fauchée pour deux images capturées avec le Ricoh GRIII. A des fins de cartographie forestière, il est préférable d’acqué-rir des images à moins bonne résolution mais avec une plus grande fauchée, avec donc plus d’objets présents sur l’image. La première image en haut est une prise de vue à 100 mètres d’altitude : la résolution y est de 3.4 cm/pixel et la largeur de la fauchée est de 125 mètres. La deuxième image en bas et une prise de vue à 225 mètres, de 6.8 cm/pixel et d’une emprise de 275 mètres de large. En rouge sur l’image du bas, les limites de la fauchée de
l’image du haut. . . 14
Figure 6 The small unmanned aerial system (UAS) Gatewing
X100 on its launcher, ready for take-off. . . 21
Figure 7 Elements of the orientation of individual aerial images
were computed by automatic aerotriangulation. (Left) One of the 439 images ; (Right) the aerotriangulated
model. Camera poses are displayed with green dots. . . . 28
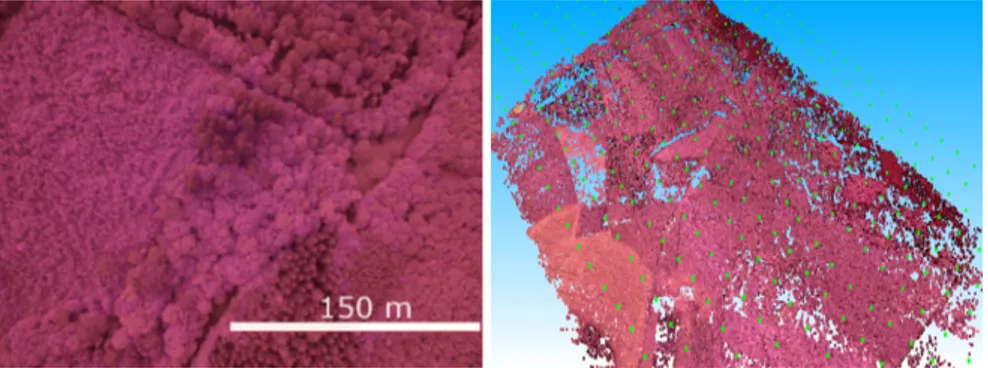
Figure 8 Comparison of two matching strategies : Malt (Left) and
MICMAC (Right). Red circles highlight the positions of trees that have not been reconstructed with Malt. The optimal photo-DSM used, further, is the DSM produced with MICMAC. The grey scale is related to the height
of the vegetation. . . 29
Figure 9 Close-up of the canopy surface model. (Left) The canopy
surface model (the grey scale is related to the height of the vegetation) ; (Center) map of the normalized cross-correlation score, expressing the similarity of the images (the normalized cross-correlation score ranges from zero (dark area, low similarity) to one (white area, high
simi-larity)) ; (Right) false color ortho-photo mosaic. . . 29
Figure 10 Comparison between photogrammetric and LiDAR point
clouds along a transect of 80 meters. LiDAR pulses pe-netrate the forest canopy and better account for small
gaps and peaks, than the photogrammetric point cloud. . 30
Figure 11 Evaluation of the differences between LiDAR and photo
canopy height models : enlargement of a small part of the Felenne forest for visual comparison (units are in meters). (Top Left) photo-canopy height model (CHM) ; (Top Right) LiDAR-CHM ; (Bottom Left) difference in elevation between photo-CHM and LiDAR-CHM ; (Bottom Right) false color ortho-photo mosaic. The units of height and height differences are meters and the grey scale is related to the height of the vegetation (Top)
Figure 12 Les deux pilotes à distance récupèrent le drone Gatewing X100 après un atterrissage. Le pilote de gauche tient la liste de vérification des opérations et le pilote de droite effectue les opérations, tantôt sur le drone, tantôt sur la
station de contrôle au sol qu’il tient à la main. . . 43
Figure 13 Une des 441 images dans le proche infra-rouge acquises
sur le massif forestier de Felenne. . . 45
Figure 15 Corrélation multi-stéréo en géométrie terrain : pour
chaque position (X,Y) dans la géométrie terrain, l’altitude Z est recherchée le long d’un intervalle d’incertitude par
la mise en correspondance des vignettes des n-images. . . 49
Figure 16 Corrélation stéréo en géométrie image avec MMByP :
pour chaque position (u,v) dans la géométrie de l’image maitresse, la profondeur (z) est recherchée le long d’un intervalle d’incertitude par la mise en correspondance
des 2 images. . . 50
Figure 17 Surface de la canopée forestière reconstruite au moyen
de différentes stratégies de corrélation (de haut en bas) :
Malt, MMByP et Micmac. Les niveaux de gris
repré-sentent l’altitude [m] de la canopée et du sol. En bas :
une orthophotomosaique fausse couleur. . . 52
Figure 18 Comparaison visuelle par transect du modèle de
sur-face de canopée photogammétrique (points bleus) et du nuage de point LiDAR haute densité (points jaunes). Une image aérienne en couleur issue d’un autre vol drone est ajoutée en haut pour faciliter l’interprétation du transect
(80 mètres de long) dans les deux nuages de points. . . . 54
Figure 19 MNC photogrammétrique généré avec l’outil MICMAC
(figure au centre) centré sur une placette d’inventaire (cercle rouge). À gauche : une orthophotomosaique en fausse couleur. À droite : le MNC LiDAR. Les niveaux
de gris représentent la hauteur de la canopée [m]. . . 56
Figure 20 Differences in spectral response captured with a
com-pact camera mounted on an UAS for two tree crowns (birch and poplar species). Density curves for the red,
green and blue band are depicted on the right. . . 59
Figure 21 Individual aerial RGB images of a forest opening from
survey 1 (spring), 5 (summer) and 10 (autumn). . . 64
Figure 22 Summary of the photogrammetric workflow. Recent
de-velopment in software facilitates the automatic proces-sing of hundred of images in order to produce a 3D model (Digital Surface Model) and an orthophotomosaic (seeLisein et al.(2013b) for additional detail). . . 65
Figure 23 Part 1 of 2. Zoom-in overview of the time series of high resolution forested orthophotomosaics (20cm GSD). The 10 RGB orthophotomosaics are illustrated. Delineated trees are colored by species ; English oak : green - po-plars : orange - sycamore maple : blue - common ash :
white - birches : purple. . . 70
Figure 23 Part 2 of 2. Zoom-in overview of the time series of high
resolution forested orthophotomosaics (20cm GSD). The 10 RGB orthophotomosaics are illustrated. Delineated trees are colored by species ; English oak : green - po-plars : orange - sycamore maple : blue - common ash :
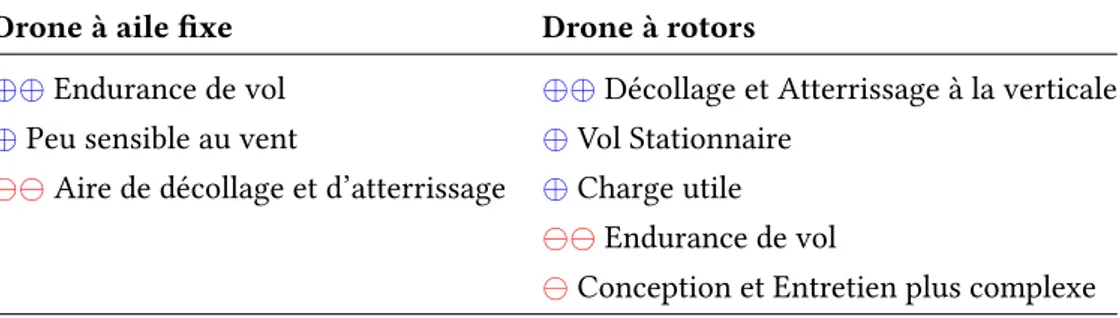
Table 1 Synthèse de la comparaison des drones à voilure fixe et
à voilure tournante pour leur usage en foresterie. . . 10
Table 2 Résolution et largeur de fauchée d’image du Ricoh GRIII
pour différentes hauteurs de vol, en supposant une prise
de vue nadir. . . 12
Table 3 Parameters applied for multi-image, multi-resolution
digital surface model (DSM) generation. The simplified tool, Malt, was not further used, since it did not offer the opportunity to finely adapt the altimetric dilatation. * Two consecutive dense matching processes at the same resolution can potentially refine the result, as hidden
parts are detected and used in the following step . . . 26
Table 4 Correlation between photo-CHM and LiDAR-CHM
win-dow metrics. Bold figures represent the highest
correla-tion scores. . . 32
Table 5 Characteristics of deciduous stands. Statistics were
ob-tained from the 36 measured field plots (mean, minimum,
maximum and standard deviation values). . . 33
Table 6 Comparison of dominant height (Hdom) models for
de-ciduous irregular stands (n = 36) based on photo-CHM and LiDAR-CHM metrics. Model performance is
des-cribed in terms of adjusted r2, root-mean-square error
(RMSE) (m) and relative RMSE (%). ID stands for model
identification number. . . 33
Table 7 Comparison of individual tree height models (n = 86)
based on photo-CHM and LiDAR-CHM metrics. Model
performance is described in terms of adjusted r2, RMSE
(m), relative RMSE (%) and average deviation at the 90th
percentile (|e|90). . . 34
Table 8 Modèles de régression à une et deux variables
expli-catives pour prédire la hauteur dominante (Hdom) en peuplements feuillus irréguliers (n=36). Les variables explicatives sont des statistiques synthétisant le mo-dèle numérique de canopée photogrammétrique (p99 :
99ième percentile ; mean : moyenne ; std : écart-type).
Les performances des modèles sont exprimées en terme
de coefficient de détermination ajusté (r2aj.), d’erreur
moyenne quadratique (RMSE) et d’erreur moyenne
qua-dratique relative (RMSE %). . . 53
Table 9 Characteristics of the 20 image blocks composing the time series of UAS imagery. 2 successive flights were performed for all 10 acquisition dates ; one flight was performed with a visible camera, and one flight was performed with a modified camera for near infra-red acquisition (respectively denoted as RGB and CIR ca-mera). The minimum and maximum altitude, GSD, and the number of images, are emphasized in bold writing.
?Growing Degree Days.??Ground Sample Distance
[cm/pixel]. . . 63
Table 10 Classification error for each flight and for each survey
(combination of CIR and RGB flights). Surveys in spring and early summer gave the best results and the RGB
camera clearly outperforms the color infra-red camera. . 72
Table 11 Added value of multitemporal datasets for species
dis-crimination. The 5 best two-date combinations and the 5 best three-date combinations. Survey 3 (2013-05-28, highlighted in bold) was present in all the combinations, and survey 4 (2012-06-05, in italic writing) was involved
ABL Above Ground Level
AHRS Attitude and Heading Reference System
ALS Airborne Laser Scanning
APERO Aérotriangulation Photogrammétrique Expérimentale Relativement
Opérationnelle
BBA Bundle Block Adjustment
BLOS Beyond Line Of Sight
CCD Charge-Coupled Device
CHM Canopy Heigth Model
CIR Color Infra-Red
CBH Circumference at breast height
DEM Digital Elevation Model
DG Direct Georeferencing
DGAC Direction Générale de l’Aviation Civile (France)
DGTA Direction Générale des Transports Aériens (Belgique)
DSM Digital Surface Model
DTM Digital Terrain Model
ENSG Ecole Nationale des Sciences Géographiques
FPV First Person View
GCP Ground Control Point
GCS Ground Control Station
GDD Growing Degree Day
GPS Global Positioning System
GSD Ground Sample Distance
Hdom Hauteur Dominante
IGN Institut National de l’information Géographique et forestière
IMU Inertial Measurement Unit
LiDAR Light Detection and ranging
MALT MAtching Light Tool
MICMAC Multi-Images Correspondances, Methods for Automatic Correlation
MAP Manuel d’Activité Particulière
MNC Modèle Numérique de Canopée
MNE Modèle Numérique d’Elévation
MNH Modèle Numérique de Hauteur
MNS Modèle Numérique de Surface
MNT Modèle Numérique de Terrain
OOB Out Of Bag error
RF Random Forest
RGB Red Green Blue
RMSE Root-Mean-Square Error
RTK Real Time Kinematic
SIFT Scale-Invariant Feature Transform
SfM Structure from Motion
UAS Unmanned Aerial System
UAV Unmanned Aerial Vehicle
ULG Université de Liège
VTOL Vertical Take-Off and Landing
VLOS Visual Line Of Sight
1
I N T R O D U C T I O N 1.1 contexte
Depuis toujours, l’Homme a interagi avec son environnement, en façonnant les écosystèmes afin de répondre à ses besoins. Ainsi, la forêt endosse diverses fonctions dont la production de bois, l’accueil du public, la protection de la biodiversité et la séquestration du carbone. La demande en matière première pour l’industrie est régie par une compétition intense et de plus en plus globale, dûe à la libéralisation des marchés. Parallèlement, la nécessité de protéger des écosystèmes forestiers est mise en exergue par les changements globaux dont l’espèce humaine est responsable (réchauffement planétaire,
perte de biodiversité, etc.) (Chapin et al.,2009). Les informations requises aux
gestionnaires forestiers pour faire face à ces attentes antagonistes sont de plus en plus complexes, ce qui pose de nouveaux défis méthodologiques pour
les programmes d’inventaires forestiers (White et al.,2016). Ces informations
doivent être précises, peu couteuses, géolocalisées et à jour. Elles doivent renseigner la composition de la forêt, son potentiel récréatif et enfin, son potentiel de production en bois. Le défi rencontré par le gestionnaire est d’assurer une gestion intégrée et durable de ces écosystèmes. Relever ce défi nécessite la maîtrise de nombreuses disciplines, ainsi qu’une bonne connais-sance de la ressource. La complexité de la planification forestière découle de la difficulté d’appréhender la dynamique forestière sur de grandes surfaces
et pendant un laps de temps suffisant (Lejeune,1994). Les forestiers ont été
parmi les premiers, après les militaires, les géographes et les géologues, à
utiliser de manière importante et récurrente les techniques de télédétection1
dans leurs démarches d’inventaire et de cartographie de la ressource (Koch
et al.,2008). Ces techniques de télédétection sont aussi bien terrestres que satellitaires et aéroportées. Elles offrent la possibilité au gestionnaire d’appré-hender de larges surfaces et d’y mener à bien un aménagement sur le long terme.
Le développement fulgurant des drones civils a introduit cette technologie de pointe dans de nombreux secteurs. Un drone est un aéronef télécommandé
sans pilote à bord, disposant d’une certaine autonomie de vol (Eisenbeiss,
2009). Cette autonomie est conférée à ces robots volants par les instruments
de navigation embarqués dans le drone : GPS, station inertielle (mesure de l’orientation), boussole, baromètre (mesure de la hauteur de vol), etc. Les drones peuvent jouer un rôle d’acteur, lorsque ceux-ci sont munis d’une charge utile permettant d’interagir avec leur environnement (prélèvement de matériel génétique sur de grands mammifères, destruction de nids de frelons, livraison de colis, etc.). Cependant, la grande majorité des drones joue un rôle d’observateur, et ont pour charge utile un capteur tel qu’un simple appareil
1 Remote Sensing
photographique. Bien qu’un aéromodèle puisse être considéré comme un
drone2, les systèmes entièrement autonomes, navigant sur base d’un plan
de vol composé d’un ensemble de points de navigation, ont, grâce à leur précision de navigation et leur fiabilité, la préférence des professionnels du secteur de la cartographie. La miniaturisation des capteurs, l’ère de l’imagerie numérique et les avancées en traitement d’images, portées par la grande puissance de calcul disponible aujourd’hui, promettent au secteur de la
carto-graphie par drone de nombreuses perspectives (Remondino et al.,2011). Ainsi,
de récentes études tentent de mettre au point des protocoles d’utilisation des
drones pour des domaines aussi divers que l’archéologie (Verhoeven et al.,
2012), l’agriculture de précision (Torres-Sánchez et al.,2014), la topographie
(Fonstad et al.,2013) et le recensement de la grande faune (Linchant et al.,
2015). Les défis rencontrés pour une utilisation opérationnelle des drones sont
pluridisciplinaires. Ainsi, le système drone doit être lui-même fiable3, doté
d’une endurance de vol suffisante et d’un mode de pilotage en adéquation avec la réalisation de la prise de vue. La prise de vue doit être planifiée avec un recouvrement important entre images, sans omission de la scène survolée (telles que des zones non visibles sur les photographies). De nombreux para-mètres de vol vont influencer la qualité du résultat, à commencer par l’altitude et la distance entre deux lignes de vol, qui vont conditionner le recouvrement latéral des images. Les traitements d’images, qui aboutiront à la création de modèles tridimensionnels et de mosaïques d’ortho-images, doivent sa-tisfaire les exigences en terme de précision et de qualité spectrale requises pour l’usage défini a priori. La photogrammétrie moderne est en constante évolution, et de nombreuses questions subsistent à propos du paramétrage de ces chaînes de traitement, en fonction des objectifs poursuivis. Enfin, le respect de la législation en vigueur, nécessitant typiquement l’agréation de la plateforme drone, la formation adéquate du télépilote et l’autorisation de vol pour chaque travail aérien, sont des contraintes majeures sur la facilité et la flexibilité de déploiement des drones civils. En fonction des objectifs recherchés, différents systèmes de drones ont été développés, variant en taille et à même d’embarquer une large diversité de capteurs. L’utilisation de cette technologie a dès lors abouti à un succès plus ou moins prononcé. En archéologie par exemple, l’utilisation de drones pour l’auscultation tridimen-sionnelle d’ouvrages est quasiment devenue une routine dans les pays où la
législation ne présente pas de contrainte majeure à leur utilisation (
Verhoe-ven et al.,2012;López et al.,2016). En foresterie, les caractéristiques de la canopée forestière, discontinue et répétitive par nature, rendent l’utilisation
de la photogrammétrie par drone plus complexe (Véga and St-Onge,2008).
En effet, la canopée forestière est un milieu poreux, en perpétuel mouvement, et présentant un micro-relief important. La discontinuité de la canopée va à l’encontre de l’hypothèse sous-jacente à la modélisation d’une surface par photogrammétrie, car, simplement, la canopée forestière n’est pas une surface. Un nombre important d’études se sont penchées sur cette problématique,
2 le terme drone renseigne le caractère non-récréatif de l’usage d’avion sans pilote à bord. Les aéromodèles sont quant à eux réservés à un usage purement récréatif.
3 Les systèmes drones sont rendus fiables entre autres par des procédures de sécurité automa-tiques et par la redondance de matériel (capteurs et moteurs)
en particulier sur l’étape d’appariement dense4d’images en milieu forestier
(Järnstedt et al.,2012;Baltsavias et al.,2008;White et al.,2013). Les limi-tations rencontrées en appliquant les processus de photogrammétrie à des images de la canopée sont bien connues : occlusions multiples, objets de géo-métrie répétitive, objets transparents, objets en mouvement, jeux d’ombres, etc. L’établissement de protocoles de prise de vue et de traitements adaptés aux scènes forestières pourrait néanmoins permettre la bonne réalisation de
cartes du relief (2.5D) de la canopée à partir d’imagerie drone (Dandois et al.,
2015).
Le développement de drones civils utilisés pour de la prise de vue aé-rienne offre de nouvelles opportunités en termes de caractérisation de la forêt. L’avènement de cette source d’information de très haute résolution sous-tend activement le développement du concept de foresterie de précision, avec une caractérisation et une action sylvicole se focalisant sur les arbres
individuels, et non plus seulement au niveau du peuplement (Drauschke et al.,
2014). La sylviculture d’arbres objectifs, nécessitant le détourage5des arbres
d’avenir sur lesquels est concentrée la production de qualité (Bastien and
Wilhelm,2000;De Saint-Vaulry,1969), est un exemple typique de foresterie de précision. Pour mener à bien ce type de sylviculture, il est important d’effectuer le suivi du degré de fermeture de la canopée autour des houppiers des arbres objectifs, afin d’ajuster la fréquence et l’intensité des éclaircies. Ces informations peuvent typiquement être obtenues depuis des images ac-quises par drone, et ce de manière plus aisée que par un inventaire sur le
terrain. Une sylviculture de peuplements forestiers mélangés et irréguliers6
profiterait également d’une cartographie de l’ensemble des arbres observés
depuis le ciel. En outre, une caractérisation de l’essence7des arbres est
pos-sible par utilisation de l’information spectrale obtenue par photographie aérienne. La discrimination de l’essence des arbres est une étape préalable à la détermination de l’adéquation des essences avec la station forestière. De même, l’étude de l’autécologie des espèces, visant à la description des exigences des essences vis-à-vis des facteurs du milieu, nécessite de facto la connaissance des essences. A noter que l’individualisation des couronnes d’arbres et la détermination de l’essence depuis de l’imagerie drone - par photointerprétation par exemple - n’est pas une étape aisée, et ne fournit pas un résultat intrinsèquement plus précis que des mesures d’inventaire sur le terrain. La différence réside dans la capacité de couvrir rapidement, avec un drone, une surface en plein qui permet l’étude de phénomènes à une échelle relativement étendue. De plus, la géolocalisation précise des cou-ronnes d’arbre depuis l’imagerie drone permet le croisement des informations relatives à ces arbres (essences, hauteur, état sanitaire) avec les données de description des conditions du milieu (topographie, pédologie, climat) dispo-nibles dans des systèmes d’information géographique. La technologie drone
4 corrélation dense, ou mise en correspondance
5 Le détourage est une opération vigoureuse d’enlèvement de tous les arbres (ou tiges) qui sont en contact avec des arbres d’avenir et qui gênent leur développement optimal. Il est effectué localement autour d’un petit nombre de tiges de qualité
6 composé d’arbres d’essence et d’âge divers 7 espèce de l’arbre
Figure 1: Exemple d’utilisation d’imagerie drone en foresterie : suivi de la défoliation du frêne atteint de Chalarose (Chalara fraxinea). La très haute résolution des images permet d’apprécier le degré de défoliation (chiffre indiqué en rouge).
est avantageusement utilisée par les scientifiques et par les acteurs d’une sylviculture de précision pour pousser leurs investigations à une échelle qui
n’est pas couverte par les autres technologies de télédétection (Anderson and
Gaston,2013). Parmi les applications les plus prometteuses, citons le suivi
de l’état sanitaire des arbres (Michez et al.,2016b;Lehmann et al.,2015)(voir
figure1), l’inventaire de dégâts causés par des épisodes de tempête, de feu de
forêt ou de quelconque évènement climatique extrême (Torresan et al.,2015),
la détection des trouées (Getzin et al.,2014), le suivi du degré de détourage
d’arbres objectifs et le suivi de l’irrégularisation de peuplement résineux. Enfin, les techniques de reconstruction tridimensionnelle à partir d’images rendent envisageable la mesure de la géométrie des houppiers, ainsi que celle
de la hauteur de la canopée (Dandois and Ellis,2010;Puliti et al.,2015).
1.2 objectif et structure de la thèse
C’est dans ce contexte de foresterie de précision et du développement ful-gurant des applications civiles de la technologie drone que s’inscrit cette thèse. Elle vise à explorer les possibilités d’utilisation de mini-drones pour la caractérisation quantitative et qualitative de la ressource forestière. Pour évaluer ces possibilités, nous avons choisi de nous intéresser respectivement à l’estimation de la hauteur des arbres et à la caractérisation de la composition spécifique au sein de peuplements forestiers. La hauteur de la canopée est une variable dendrométrique de première importance : elle est un bon indicateur du stade de développement des peuplements et intervient notamment dans les estimations de biomasse ou de niveau de productivité. La composition
spécifique est une information essentielle en regard des principales fonctions que remplit la forêt (conservation, production, récréation, etc.).
Ce travail est une thèse dite à articles, à savoir que le présent manuscrit s’articule autour d’une compilation de trois articles indépendants. Chacun de ces articles adopte la structure conventionnelle d’une publication scientifique et comporte ainsi une introduction, une description du matériel et de la méthode, les résultats obtenus et une conclusion. Ces articles couvrent les deux questions principales de cette recherche, que nous formulons de la manière suivante :
a. Comment et avec quelle précision peut-on mesurer la hauteur des arbres à partir d’imagerie aérienne à très haute résolution ?
b. Comment et avec quelle précision discriminer les essences forestières via l’information spectrale de mosaïques d’ortho-images ?
Les deux articles des chapitres 2et3portent sur la mesure de la hauteur
des peuplements (question A). La dimension "mesure 3D" par photogrammé-trie est l’élément central de cet axe de recherche. Ces deux chapitres sont basés sur le même jeu de données (images drone et inventaire forestier) et
sont donc très similaires. Néanmoins, le chapitre2cible de manière plus
spécifique un public "forestier". Le chapitre3, quant à lui publié dans une
revue de photogrammétrie et de télédétection, met l’accent sur les techniques de traitements d’images. Pour remettre dans le contexte cette investigation sur les chaînes de traitements permettant de modéliser finement le relief de la canopée, il faut préciser qu’elle coïncide avec l’apparition des tech-niques de photogrammétrie moderne. Auparavant, l’appréhension de bloc d’images via les techniques de photogrammétrie traditionnelle nécessitait de nombreuses étapes manuelles, rendant la technique totalement prohibi-tive sur des données drones de plusieurs centaines d’images. Dans ces deux chapitres, les algorithmes de traitements d’images sont renseignés avec de nombreux détails. Mais nous tenons à préciser qu’il est actuellement possible d’effectuer de manière opérationnelle des mesures de hauteurs d’arbres par photogrammétrie, sans pour autant disposer du bagage d’un expert en trai-tement d’images. De nombreuses suites logicielles offrent actuellement des solutions automatiques et efficientes. Les références bibliographiques de ces deux articles sont les suivantes :
• Lisein, J., Pierrot-Deseilligny, M., Bonnet, S., Lejeune, P., 2013. A photo-grammetric workflow for the creation of a forest canopy height model from small unmanned aerial system imagery. Forests 4 (4), 922-944.
• Lisein, J., Bonnet, S., Lejeune, P., Pierrot-Deseilligny, M., 2014. Mo-délisation de la canopée forestière par photogrammétrie depuis des images acquises par drone. Revue Francaise de Photogrammétrie et de Télédétection1-10.
La question relative à la détermination de la composition spécifique
(ques-tion B) est abordée au chapitre4, où la discrimination automatique d’essences
d’ortho-images individuelles, mais également sur des combinaisons de mo-saïques d’ortho-images acquises tout au long de la saison de végétation. Alors que le premier axe de travail est centré sur l’aspect tridimensionnel, ce tra-vail sur la "discrimination des essences forestières" au départ de l’information spectrale est davantage interdisciplinaire. Outre les disciplines d’utilisation d’un drone et de la photogrammétrie, la phénologie des essences y est in-vestiguée. De plus, des algorithmes de classification supervisée (les forêts
aléatoires8) sont utilisés dans une approche d’analyse d’images basée sur des
objets, c’est-à-dire des groupes de pixels spatialement connectés. En outre,
l’article du chapitre4est publié dans une revue généraliste pour un public
plus large, allant de l’écologue à l’expert en télédétection :
• Lisein, J., Michez, A., Claessens, H., Lejeune, P., 2015. Discrimination of deciduous tree species from time series of unmanned aerial system imagery. Plos ONE 10 (11).
Enfin, ce document de thèse se clôture par le chapitre5présentant les
conclusions ainsi que les perspectives qu’apportent l’utilisation des drones à l’inventaire des ressources forestières.
1.3 travaux connexes à la thèse
Nos travaux, initiés en septembre 2012, ont marqué le début des recherches menées à Gembloux Agro-Bio Tech sur l’application des drones dans les problématiques environnementales. Notre rôle de « poisson pilote » dans cette matière au sein du Département BIOSE nous a amené à participer à de nombreuses réflexions et à plusieurs projets pilotes visant à démontrer l’utilité des drones dans d’autres domaines que la foresterie : agriculture de précision, gestion de la grande faune, hydrologie, etc. Ces nombreux échanges avec des chercheurs œuvrant dans différentes disciplines, nous ont permis de faire partager notre expérience naissante dans les domaines du fonctionnement des drones et de la photogrammétrie. Si ces travaux connexes ont pu, à certains moments, ralentir la bonne progression de notre recherche principale, ils ont eu le mérite de nous offrir une bonne vue d’ensemble des possibilités offertes par les drones dans le domaine environnemental, en débordant largement de la seule sphère forestière. Ils se sont traduits par une participation en tant qu’auteur principal ou que co-auteur à 7 autres publications scientifiques :
• Vermeulen C., Lejeune P., Lisein J., Sawadogo P., Bouché P. [2013]. Unmanned Aerial Survey of Elephants. PLOS ONE 8 (2), e54700. • Lisein J., Linchant J., Lejeune P., Bouché P., Vermeulen C. [2013].
Aerial survey of large ungulates using an Unmanned Aerial System (UAS) : comparison of different methods for estimating the surface area of sampling strips. Tropical Conservation Science 6 (4), 506–520. • Linchant J., Lisein J., Semeki J., Lejeune P., Vermeulen C. [2015]. Are
unmanned aircraft systems (UASs) the future of wildlife monitoring ? A review of accomplishments and challenges. Mammal Review.
• Ouédraogo M.M., Degré A., Debouche C., Lisein J. [2014]. The eva-luation of unmanned aerial system-based photogrammetry and ter-restrial laser scanning to generate DEMs of agricultural watersheds.
Geomorphology 214, 339–355.
• Lisein J., Pineux N., Pierrot-Deseilligny M., Degré A., Lejeune P. [2014]. Détection de l’érosion dans un bassin versant agricole par comparaison d’images multidates acquises par drone. Colloque scien-tifique francophone : Drones et moyens légers aéroportés d’observation. Montpellier - France, 1–9.
• Michez A., Piégay H., Lisein J., Claessens H., Lejeune P. [2016]. Mapping of riparian invasive species with supervised classification of Unmanned Aerial System (UAS) imagery. International Journal of
Applied Earth Observation and Geoinformation 44, 88–94.
• Michez A., Piégay H., Lisein J., Claessens H., Lejeune P. [2016]. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial sys-tem. Environmental monitoring and assessment 188 (3), 146.
Ces publications ne font pas partie du présent document mais sont ac-cessibles sur le répertoire institutionnel de dépôt des publications de l’ULG (ORBI : Open Repository and Bibliography).
1.4 les drones pour la cartographie
Drones... represent the cold, tech-nological embodiment of observa-tion.
Ryan Calo
Drones... they extand our senses. They extand our vision, giving us "eye in the sky", overhead or accros the globe.
Chris Anderson
La technologie des drones présente une importante diversité de plate-formes et d’utilisations. La polyvalence des drones est la clé de leur succès : l’identification d’une nouvelle utilisation potentielle mène directement à
l’adaptation des systèmes drones en conséquence (Finn and Wright,2012).
Figure 2: Les deux catégories les plus courantes de châssis drones sont les drones à voilure tournante (drone à rotors de type hélicoptère) et les drones à voilure fixe (type aile volante ou planeur). Sur l’image à droite, le modèle Gatewing X100 et à gauche, le modèle GX8.
d’espionnage. La genèse de cette technologie, issue du domaine militaire, en est une cause certaine. Pourtant, cette vision est fortement réductrice. Afin d’éviter tout amalgame, nous précisons ici que notre utilisation des drones se limite à la télédétection environnementale, c’est-à-dire l’acquisition d’images d’espaces naturels pour la génération d’information spatiale à très haute résolution. Par souci de clarté et de concision, nous décrirons brièvement dans cette section une catégorie très spécifique de drones ; ceux utilisés pour la télédétection relative à l’observation de l’environnement naturel. Nous passons uniquement en revue les petits drones à voilure fixe et à voilure tournante, avec un descriptif succinct de leurs avantages et inconvénients respectifs. Pour une description plus exhaustive des catégories de drones et des enjeux relatifs à la cartographie des espaces naturels, nous renvoyons le
lecteur vers les travaux deWatts et al.(2012) et deHardin and Jensen(2011).
1.4.1 Les types de châssis et leurs usages en foresterie
De par la multifonctionnalité des forêts, le scientifique ou le gestionnaire éprouve des besoins divers en termes de nature de l’information requise et de surface à couvrir. C’est pourquoi il est bon d’évoquer les forces et faiblesses
des drones à aile fixe et des drones à voilure tournante (voir figure2). Bien
qu’en majorité, les surfaces forestières à couvrir excèdent facilement le km2
(soit 100 ha), il faut préciser que la capacité de vol d’un drone à motorisation électrique dépasse rarement une à deux heures de vol. Cette endurance de vol étant le facteur le plus limitant pour un usage forestier, il faut convenir
que l’utilisation d’un drone restera un outil d’analyse à l’échelle locale (Puliti et al.,2015). La catégorie de drones à aile fixe est naturellement plus adaptée aux besoins forestiers, ceux-ci ayant une meilleure autonomie de vol. En effet, ceux-ci utilisent, pour se maintenir en vol, la portance que leur pro-cure le déplacement d’air sous leurs ailes. Leur vitesse en vol est également plus élevée que celle des drones à voilure tournante, entrainant une plus grande surface couverte pour une endurance de vol équivalente à un drone
de type hélicoptère (Linchant et al.,2015). En outre, les drones à aile fixe
sont plus simples de conception que les drones à voilure tournante : un seul et unique moteur fournit la propulsion nécessaire. Cependant, les drones à aile fixe présentent moins de manœuvrabilité et sont moins polyvalents que les drones à voilure tournante. Ces derniers sont capables d’effectuer des vols stationnaires, d’embarquer de plus grosses charges utiles et sont moins sensibles aux changements de centre de gravité de la plateforme (ré-sultant par exemple de l’ajout d’un capteur sur le châssis). De plus, ceux-ci
permettent un décollage et un atterrissage à la verticale9. Le décollage et
l’atterrissage à la verticale sont les avantages les plus notables des drones de cette catégorie, la nécessité de disposer d’une aire d’atterrissage exempte d’obstacles étant un facteur limitant du déploiement des drones en milieu forestier. En effet, si en Belgique les voiries et la proximité de champs cultivés permettent systématiquement de disposer d’une aire d’atterrissage pour un avion à aile fixe, il en est différemment dans d’autres types d’habitat. En forêt tropicale, en dehors des voiries et des aires d’aéroport, il est rare de disposer d’une aire libre de tout obstacle. A titre indicatif, 150x30 mètres est l’aire
d’atterrissage que nécessite le Gatewing X100 (figure2).
Si les drones peuvent soit être pilotés à distance, soit naviguer automati-quement sur la base d’un plan de vol conçu préalablement au vol, ou encore avoir une combinaison du vol manuel et automatique, la nécessité de couvrir
de grandes surfaces requiert d’effectuer des vols hors vue10, et ce de manière
automatique. La législation qui régit les vols hors vue, quand celle-ci existe, est plus contraignante que la législation relative aux vols à vue. En parallèle à une filière industrielle portant sur l’utilisation des drones pour la gestion forestière, l’utilisation de drones à des fins de recherches expérimentales est une activité très prometteuse. Les études en sciences forestières ou environne-mentales nécessitent une récolte de données importante, qui s’avère souvent très coûteuse, sur des parcelles ou peuplements de taille limitée. Les drones à voilure tournante sont dès lors plus indiqués pour un usage sur une surface limitée. De plus, l’utilisation de divers capteurs dans le cadre de recherches expérimentales (caméra infra-rouge, multispectrale, thermique, laser, etc.) est largement plus aisée avec des drones à voilure tournante. Ceux-ci sont géné-ralement dotés d’une nacelle, ou d’un espace sous leur châssis, permettant la mise en place d’un ou plusieurs capteurs de poids plus importants. Bien entendu, une charge utile importante va d’autant plus grever l’autonomie de vol.
9 Vertical Take-Off and Landing 10 Beyond Line of Sight
Table 1: Synthèse de la comparaison des drones à voilure fixe et à voilure tournante pour leur usage en foresterie.
Drone à aile fixe Drone à rotors
⊕⊕Endurance de vol ⊕⊕Décollage et Atterrissage à la verticale
⊕Peu sensible au vent ⊕Vol Stationnaire
Aire de décollage et d’atterrissage ⊕Charge utile
Endurance de vol
Conception et Entretien plus complexe
Type d’usage en foresterie
Gestion forestière Recherche scientifique
Une synthèse des avantages et inconvénients des drones à aile fixe et des
drones à voilure tournante est présentée tableau1. Pour résumer, les ailes
fixes ont la préférence du gestionnaire forestier grâce à leur capacité à couvrir de grandes surfaces (>100 ha), alors que les drones de type hélicoptère sont plus appropriés aux vols à caractère expérimental. Le vol stationnaire offre une liberté totale concernant la configuration de la prise de vue aérienne. Les images sont acquises avec un très haut recouvrement, à grande proximité des objets étudiés et avec une orientation de la caméra réglable à souhait (du nadir à fortement oblique). Pour les très nombreuses utilisations des drones se cantonnant à de petites surfaces (inspection d’ouvrage, relevés topographiques, archéologie, prise de vidéo aérienne, etc.), les drones à voilure tournante surpassent les drones à aile fixe. Pour balayer de grandes surfaces ou pour atteindre des zones hors de portée, les drones à aile fixe offrent une meilleure alternative à la prise de vue traditionnelle (par avion ou ULM). 1.4.2 Les images aériennes acquises par drone
L’imagerie drone est de nature bien différente de celle de l’imagerie aéroportée par avion. Les drones volant lentement et à basse altitude, l’emprise au sol d’une image brute est restreinte (entre 50 et 300 mètres en largeur) et la résolution est très fine (de subcentimétrique à décimétrique) (voir figure
3). Les appareils photographiques embarqués sur drone sont souvent d’une
qualité géométrique médiocre : les distorsions dues à la déformation de la
lentille sont conséquentes (Aber et al.,2010). Afin de garder une emprise
de l’image au sol relativement grande, les utilisateurs optent souvent pour des grands angles d’ouverture, ce qui augmente le phénomène de distorsion perspective. La qualité des images peut également souffrir d’un effet de filé, du au déplacement du drone au moment de la prise de vue, ou encore à un flou causé par les fortes vibrations des hélices. Enfin, les changements de reliefs de la scène survolée entrainent de nombreuses omissions (parties cachées). Il en résulte que pour couvrir une zone d’intérêt, il est nécessaire d’acquérir un nombre considérable d’images présentant un fort recouvrement entres-elles (Eisenbeiss,2009). Ce recouvrement entre images permet, au moyen de points
Figure 3: Géométrie d’une image isolée, d’aprèsPinte(2014). Les drones volent à basse altitude, la résolution des images en est donc très fine mais la fauchée (emprise) des images est réduite. S : Sommet de prise de vue, T p : Taille du photosite, R : La résolution de l’image, mesurée par la distance d’échantillonnage au sol, H : Hauteur de vol, p : distance focale. La résolution R est fonction de la hauteur de vol et de la focale, suivant la relation R= p[pixels]H . La fauchée de l’image, représentée par le rectangle
en pointillé projeté au sol, est fonction de l’altitude de vol, de la taille du capteur et de la distance focale.
homologues, de les orienter les unes par rapport aux autres et de corriger les distorsions du capteur.
Les acquisitions par drone génèrent donc un volume de données important, qu’il est nécessaire d’appréhender correctement afin de délivrer une carte synthétique de la zone d’intérêt et in fine des informations à l’échelle de l’arbre. Les capteurs embarqués par le drone ne sont pas calibrés et sont généralement de piètre qualité, alors que les caméras métriques utilisées en photogrammétrie aéroportée sont de grands capteurs dont les distorsions sont faibles et connues. De plus, l’orientation de l’appareil photographique au moment de la prise de vue par drone est légèrement oblique, et très variable entre deux prises de vue successives. La centrale inertielle ne fournit pas de données précises d’orientation externe des images (position et orientation de l’appareil photographique au moment de la prise de vue). Lorsque l’altitude de vol est réduite à quelques dizaines de mètres, les caractéristiques des images aériennes sont plus proches de celles d’images terrestres que de celles d’images aéroportées classiques.
Table 2: Résolution et largeur de fauchée d’image du Ricoh GRIII pour différentes hauteurs de vol, en supposant une prise de vue nadir.
Hauteur de vol[m] 100 125 150 175 200 225 250 275 300
Largeur de la fauchée[m] 123 154 185 216 247 277 308 339 370
Résolution[cm/pixel] 3.4 4.2 5.1 5.9 6.8 7.6 8.4 9.3 10.1
1.4.3 La photogrammétrie au départ d’imagerie drone
La complémentarité des techniques de photogrammétrie11(recherche de la
plus grande précision) et de vision par ordinateur (automatisation) a initié un regain d’intérêt pour la photogrammétrie. En particulier, les développements récents des algorithmes d’orientation externe qui permettent la détermination automatique de la position et de l’orientation relative des prises de vues d’une
collection d’images se recouvrant12ont révolutionné les protocoles
d’orien-tation de bloc d’images. Cette photogrammétrie "moderne" prend en considé-ration les caractéristiques de l’imagerie drone et délivre des résultats adaptés. L’omniprésence de la photographie numérique et l’amélioration continue de la puissance de calcul des ordinateurs rendent aujourd’hui les techniques
de photogrammétrie attrayantes et concurrentielles (Pierrot-Deseilligny and
Clery,2011b). Les chaînes de traitements photogrammétriques présentent un degré d’automatisation de plus en plus élevé, permettant la reconstruction tridimensionnelle depuis une masse d’images issues d’appareils photogra-phiques compacts non calibrés.
1.4.4 Les capteurs utilisés pour nos travaux
Nos travaux sont effectués avec la plateforme clé en main commercialisée en 2010 par la firme Gatewing, le Gatewing X100. Les capteurs embarqués dans ce drone sont des appareils photographiques compacts de modèle Ricoh GR3 ou GR4 (capteur photographique CCD de 10 megapixels de 7.6 x 5.7 mm de dimension). Ces appareils sont dotés d’un objectif rétractable de focale fixe
(distance focale équivalente en 35 mm de 28 mm). Le tableau2renseigne la
dimension de la fauchée des images et leur résolution pour diverses hauteurs de vol.
Une illustration de deux images acquises à différentes altitudes de vols
est présentée en figure5. Nous disposons en permanence de deux appareils
photographiques, qui sont renouvelés quand l’usure de ceux-ci les rend hors d’usage. Le premier est en tout point similaire à ceux que l’on peut acheter dans le commerce (dénommé par après appareil photographique RGB). Le deuxième est modifié par la firme Gatewing pour des acquisitions dans le proche infra-rouge. Les modifications apportées sont 1) la suppression du
11 L’American society for photogrammetry and remote sensing et al.définissent en 1980 la photogrammétrie comme étant "l’art, la science et la technologie permettant d’obtenir des informations fiables sur l’espace naturel ou sur les objets physiques par l’enregistrement, la mesure et l’interprétation d’images photographiques ou produites par rayonnements électromagnétiques ou autres phénomènes"
Figure 4: Représentation schématique des filtres (lignes) et de la sensibilité spectrale des canaux (surfaces) pour l’appareil photographique RGB (au-dessus) et l’appareil photographique adapté pour le proche infra-rouge (en dessous). L’utilisation à tour de rôle (deux vols séparés) des deux appareils photo-graphiques permet théoriquement le calcul d’indice de végétation basé sur le rouge (au-dessus) et le proche infra-rouge (en-dessous, surface bleue), comme illustré sur le graphique de droite. Schéma adapté deNijland et al.
(2014).
filtre miroir chaud et 2) l’ajout d’un filtre passe-haut jaune (voir figure4). Ces
appareils sont utilisés en mode manuel, afin de garder la même orientation interne durant toute l’acquisition. Une mise au point à l’infini est effectuée, la hauteur de vol étant supérieure à la distance hyperfocale. L’ouverture du diaphragme s’effectue au moyen d’un obturateur central et le nombre d’ouverture est fixée à 4. La sensibilité ISO (maximum de 400 pour limiter le bruit numérique) ainsi que le temps de pose (minimum 1/800 pour limité l’effet de filé) sont définis préalablement au décollage en fonction des conditions de luminosité.
Aucune calibration spectrale n’a été effectuée : les courbes de sensibilité
spectrale présentée figure4sont purement théoriques. Au vu de la figure4,
notons que la sensibilité spectrale de la bande rouge (surface en rouge) de l’appareil photographique modifié est plus importante que celle des autres bandes. En effet, cette bande est très peu résolue, et est sensible aux longueurs d’onde dans le rouge et dans le proche infra-rouge. En pratique, il résulte souvent que cette bande est surexposée, générant malheureusement une perte d’information. La stratégie d’acquisition mise en place et présentée au
chapitre4est la suivante : deux vols consécutifs de la même zone d’intérêt
permet d’acquérir des images en RGB et des images dans le proche infra-rouge. L’enregistrement conjoint des deux blocs d’images est assuré en effectuant conjointement l’orientation des images. Les traitements photogrammétriques permettent la génération de deux mosaïques d’ortho-images, une pour chacun des appareils photographiques. La combinaison de la bande rouge de la
Figure 5: Illustration de la résolution et de la largeur de la fauchée pour deux images capturées avec le Ricoh GRIII. A des fins de cartographie forestière, il est préférable d’acquérir des images à moins bonne résolution mais avec une plus grande fauchée, avec donc plus d’objets présents sur l’image. La première image en haut est une prise de vue à 100 mètres d’altitude : la résolution y est de 3.4 cm/pixel et la largeur de la fauchée est de 125 mètres. La deuxième image en bas et une prise de vue à 225 mètres, de 6.8 cm/pixel et d’une emprise de 275 mètres de large. En rouge sur l’image du bas, les limites de la fauchée de l’image du haut.
mosaïque RGB avec la bande rouge de la mosaïque dans le proche infra-rouge nous permet ainsi le calcul d’indices de végétation tel que l’indice de végétation par différence normalisé. Bien qu’il nous soit rapidement apparu que les variations de condition de luminosité au sein d’un même vol et, de manière encore plus marquée, entre deux vols consécutifs, rendent tout à fait illusoire la détermination d’indice de végétation de manière aussi robuste qu’avec l’emploi de capteur spécifique à cet usage (capteur multispectral), l’intérêt dans l’utilisation de ces deux appareils réside dans la possibilité d’en comparer les performances.
1.5 le lidar aérien
Les technologies de télédétection sont utilisées de manière de plus en plus récurrente comme information auxiliaire aux mesures d’inventaire sur le
photo-grammétrie aéroportée, de LiDAR terrestre et d’imagerie à haute résolution offrent un complément précieux à la réalisation d’inventaire et de cartes thé-matiques (discrimination des essences par photointerprétation, délimitation des ilots de peuplements, mesure de la hauteur de la canopée). En particulier,
le LiDAR aérien révolutionne les techniques d’inventaires forestiers (White
et al.,2016). De part sa capacité à pénétrer le couvert forestier, la technolo-gie LiDAR délivre une information précise et localisée sur la géométrie des
houppiers et la hauteur des arbres (Dubayah and Drake,2000).
Dans ce travail, la technologie LiDAR occupe une place omniprésence. En Belgique, une campagne d’acquisition LiDAR basse densité a été effectuée sur l’ensemble du territoire (2014-2015), permettant une connaissance fine du relief du sol sur l’ensemble du territoire. Le modèle numérique de terrain LiDAR est systématiquement utilisé conjointement aux modèles numériques de surfaces photogrammétriques pour le calcul de la hauteur de la végétation.
De plus, sur la zone d’étude de Felenne, présentée aux chapitres2et3, une
acquisition LiDAR haute densité nous permet une comparaison des mesures photogrammétriques par drone avec les mesures de hauteurs par LiDAR. En effet, malgré le fait que les rayons du LiDAR à petite empreinte ratent fréquemment le sommet des arbres, la mesure LiDAR est considérée comme l’information la plus précise et la plus complète dont nous disposons sur la structure forestière. Enfin, la technologie LiDAR mérite toute notre attention, car l’utilisation des drones en foresterie ne s’avère intéressante que dans la mesure où elle permet d’acquérir soit une information complémentaire à celle du LiDAR, soit concurrentiel sur l’aspect financier.
La miniaturisation des scanners laser fait l’objet d’attentions toutes par-ticulières, en vue d’une utilisation sur des plateformes drones pour le suivi
de la hauteur de la végétation (Wallace et al.,2012). On peut s’attendre d’ici
quelques années à la mise sur le marché de drones embarquant du LiDAR comme capteur, ce qui lèvera certains verrous pour leur utilisation en fores-terie.
2
A P H O T O G R A M M E T R I C WO R K F L O W F O R T H E C R E AT I O N O F A F O R E S T C A N O P Y H E I G H T M O D E L F R O M S M A L L U N M A N N E D A E R I A L S Y S T E M I M AG E R Y
Lisein J., Pierrot-Deseilligny M., Bonnet S. and Lejeune P.
abstract
The recent development of operational small unmanned aerial systems (UASs) opens the door for their extensive use in forest mapping, as both the spatial and temporal resolution of UAS imagery better suit local-scale investiga-tion than tradiinvestiga-tional remote sensing tools. This article focuses on the use of combined photogrammetry and “Structure from Motion” approaches in order to model the forest canopy surface from low-altitude aerial images. An original workflow, using the open source and free photogrammetric toolbox, MICMAC (acronym for Multi Image Matches for Auto Correlation Methods), was set up to create a digital canopy surface model of deciduous stands. In combination with a co-registered light detection and ranging (LiDAR) digital terrain model, the elevation of vegetation was determined, and the resulting hybrid photo/LiDAR canopy height model was compared to data from a LiDAR canopy height model and from forest inventory data. Linear regressions predicting dominant height and individual height from plot me-trics and crown meme-trics showed that the photogrammetric canopy height model was of good quality for deciduous stands. Although photogramme-tric reconstruction significantly smooths the canopy surface, the use of this workflow has the potential to take full advantage of the flexible revisit period of drones in order to refresh the LiDAR canopy height model and to collect dense multitemporal canopy height series.
Keywords —canopy height ; forestry ; photogrammetry ; MICMAC ;
Un-manned Aerial Systems ; UAS ; UAV ; forest inventory ; uneven-aged broadleaf stands
2.1 introduction
Unmanned Aerial Systems (UASs) are pre-programmed flying robots made up of an unmanned aerial vehicle (UAV) and a ground control system. UASs are now being designed for geomatic use and offer plenty of opportunities
in the area of environmental sciences (Watts et al.,2012). The spatial
reso-lution of UAS imagery can reach a sub-decimeter ground sample distance (GSD), and the revisit period between two acquisitions can be selected in order to fit diverse scales of ecological phenomena. Small and lightweight