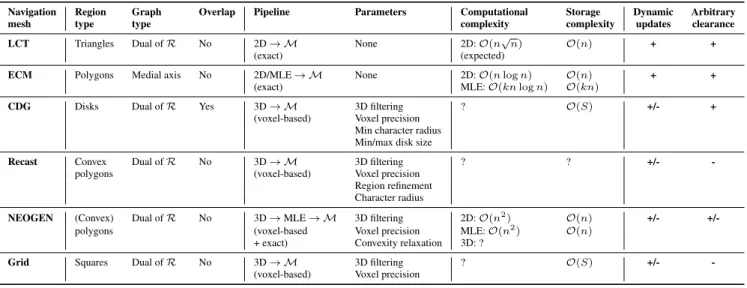
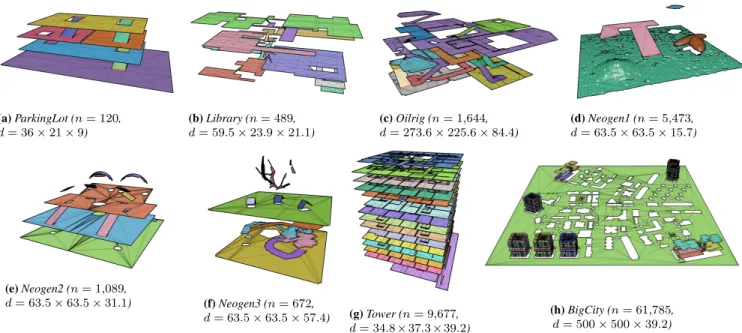
A comparative study of navigation meshes
Texte intégral
Figure

Documents relatifs
[7] corpus and our corpus (described in section 5) to evaluate a set of recent automatic seg- mentation algorithms, then we compare the obtained results by the two corpuses. We
This paper reports on a comparative study on co- designing a healthcare environment using the digital tool versus a traditional paper-based tool.. Discussion
These representations are used in different ways by the analyzed face recognition methods: (1) LBP Histograms are directly used as feature vectors together with
The three curves present the evaluation results of three different metrics 共 PAS, HAF1, and KUL metrics 兲 for the same localization results, i.e., the same ground truth and
The extraction of results for the liquid ligaments accumulated at the trailing edge of the pre-filmer plate such as ligament lengths and breakup length is challenging. To this end,
▪ GLRT algorithm [4]: it leverages the advantages of Optimal Detectors and Steganalysis machine learning approaches to employ an accurate statistical model for the base
We also demonstrated that snowball sampling method is vulnerable against two network level centrality metrics, ec- centricity and closeness as repeated sampling on different data
Fracture toughness is calculated with models involving crack length measurements, and by models free of crack length measurements by considering critical force, chipping,
