On the ternary spatial relation "Between"
Texte intégral
Figure
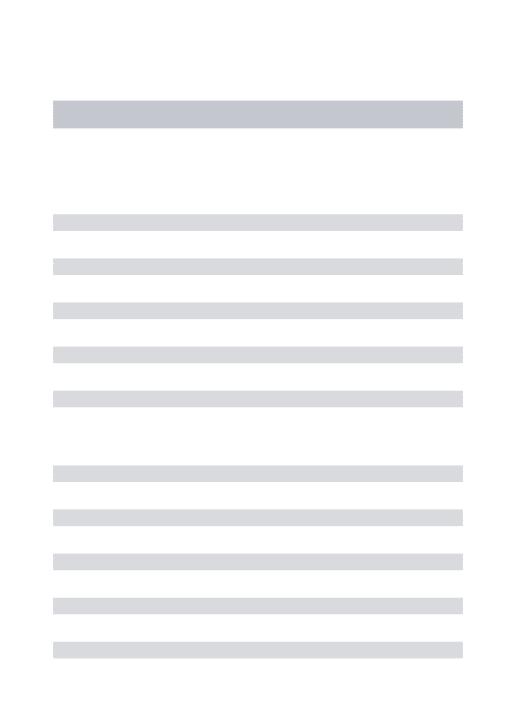
![Fig. 2. An example where is considered to be between and according to the definition of [9].](https://thumb-eu.123doks.com/thumbv2/123doknet/11636502.306606/5.918.325.586.563.693/fig-example-considered-according-definition.webp)
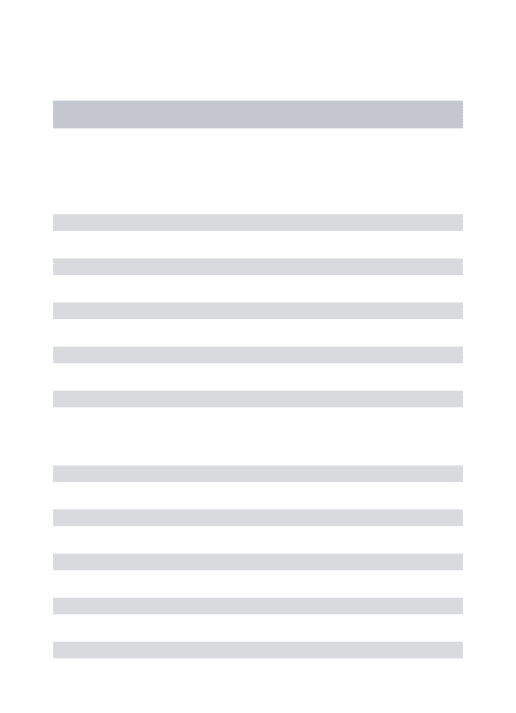
![Fig. 4. Illustration of the function !"$#&%(' proposed in [12] ( ) is a parameter expressing the tolerance in the idea of between).](https://thumb-eu.123doks.com/thumbv2/123doknet/11636502.306606/6.918.284.634.395.555/fig-illustration-function-proposed-parameter-expressing-tolerance-idea.webp)
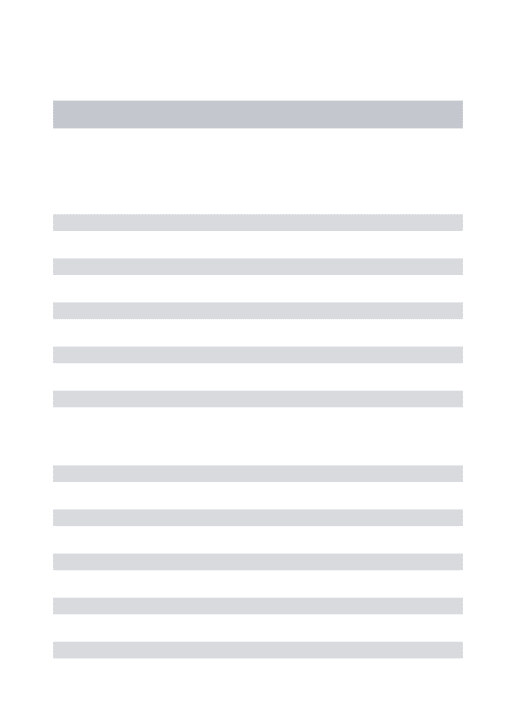
![Fig. 6. Illustration of the definition of [13]. (a) A case of ambiguity: and are considered to satisfy the relation according to this definition, while is between and but not between and](https://thumb-eu.123doks.com/thumbv2/123doknet/11636502.306606/7.918.248.669.426.566/illustration-definition-ambiguity-considered-satisfy-relation-according-definition.webp)
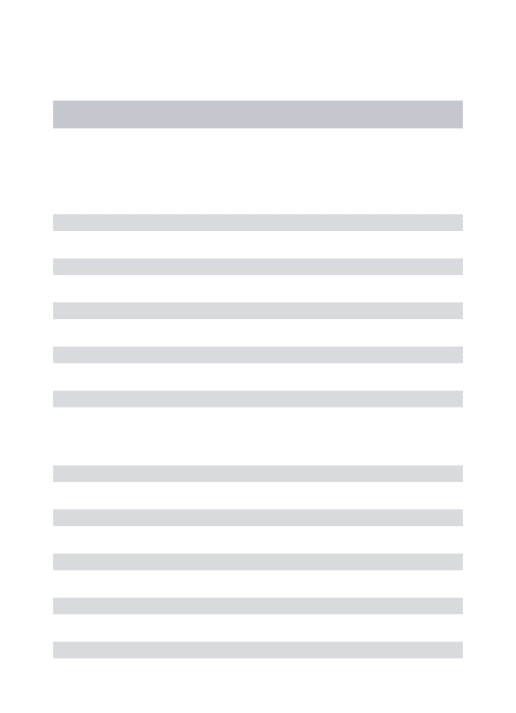
![Fig. 8. An example of objects with different spatial extension where a contextual definition is the most appropriate one [6].](https://thumb-eu.123doks.com/thumbv2/123doknet/11636502.306606/8.918.285.624.653.851/example-objects-different-spatial-extension-contextual-definition-appropriate.webp)
Documents relatifs
2 Until a refrigerator-stable vaccine becomes available, however, varicella vac- cine will not be incorporated into the recommend- ed immunization schedule in Canada, as most
Given a classification problem D, we use our algorithm and the genetic algorithm to search the feature f with high- est fitness λ D (f ) and we compare the sets of features ex-
If q ∈ ∂Ω is an orbit accumulation point, then ∆ ∂Ω q is trivial and hence there does not exist a complex variety on ∂Ω passing through
(c) On a shared link as under (b), the Network Manager may wish to ensure that usage of the link (which might be a high-performance trunk line on a network or an
a) a data description language, permitting the user to define the physical structure of files, to define logical files, and to categorize data fields for
Any LDAP operation may be extended by the addition of one or more controls ([RFC2251] Section 4.1.12). A control’s semantics may include the return of zero or
While the IPv6 protocols are well-known for years, not every host uses IPv6 (at least in March 2009), and most network users are not aware of what IPv6 is or are even afraid
o Network administrators SHOULD NOT accept prefixes when the first AS number in the AS path is not the one of the peer’s unless the peering is done toward a BGP
