© Houda Lamarfa, 2019
Développement d’une méthode multi-échelle de
traitement des nuages de points LiDAR mobile pour la
détection de convergence des tunnels miniers
souterrains
Mémoire
Houda Lamarfa
Maîtrise en sciences géomatiques - avec mémoire
Maître ès sciences (M. Sc.)
Développement d’une méthode multi-échelle de traitement des nuages de points LiDAR mobile pour la détection de convergence des tunnels miniers
souterrains
Mémoire
Houda Lamarfa Sous la direction :
Mir Abolfazl Mostafavi, directeur de recherche Christian Larouche, codirecteur de recherche
iii
Résumé du mémoire
La sécurité dans les mines souterraines est l’une des principales préoccupations des entreprises d’exploitation minières. La surveillance des moindres changements ou déformations au niveau des tunnels et galeries miniers, notamment la convergence des tunnels (rétrécissement diamétral d’une section de tunnel), figure parmi les principales priorités de ces entreprises. Les techniques de surveillance de la convergence des tunnels miniers communément utilisées se basent essentiellement sur des mesures ponctuelles et limitées qui sont généralement longues et coûteuses. Les technologies LiDAR mobiles émergentes et prometteuses amènent des pistes de solutions qui permettent de gagner en efficacité et en sécurité. Cependant, la détection et la mesure précise de convergence des tunnels miniers au moyen de données LiDAR mobile demeurent problématiques en raison des enjeux suivants : la précision des nuages de points, l’irrégularité de la zone observée, la variabilité de la densité des scans et de leur prise de vue, la présence d’obstructions, la complexité de l’alignement parfait des nuages de points.
La recherche visée dans ce mémoire de maîtrise s’inscrit dans le cadre du projet « MinEyes » et elle a pour objectif principal de détecter et de mesurer la convergence de tunnels miniers souterrains à partir de données LiDAR mobile. Pour ce faire, nous proposons une méthode multi-échelles de comparaison de nuages de points qui prend en considération les irrégularités de surface des tunnels miniers et qui permet une meilleure détection de leurs changements et une mesure plus précise de leur convergence. La méthode proposée se base sur une approche de comparaison modèle à modèle locale des nuages de points LiDAR mobile souterrain. Les résultats obtenus sont très prometteurs comparés à ceux d’autres méthodes de détection de changement dans les nuages de points LiDAR (ex. : méthodes C2C, C2M). Une analyse statistique des résultats a également permis de confirmer la robustesse de la méthode proposée surtout dans des zones rugueuses des tunnels miniers.
iv
Abstract
Security in underground mines is one of the main concerns of mining companies. Monitoring any changes or distortions in mining tunnels and galleries, including tunnel’s convergence, is one of the top priorities for those companies. Commonly used convergence monitoring techniques in underground tunnels are based on limited measurements that are usually very time-consuming and costly in terms of process. Emerging mobile LiDAR technologies offer alternative solutions that are far more efficient and lower in risk. However, the accurate measurements of convergence in mining tunnels using mobile LiDAR data remains challenging because of the following issues: limited precision of LiDAR point clouds, the roughness and irregularity of the studied surfaces in the tunnels, the irregularity of the scan density, the presence of occlusions and the complexities of reliable registration of point clouds.
This research work is defined as a part of the ‘MinEyes project’ in collaboration with the company Pecktech which main objective is to detect and measure the convergence of underground mining tunnels from mobile LiDAR data. To do so, we propose a multi-scale point cloud comparison method that considers the surface irregularities of the mining tunnels and allows a better detection of their changes and a more precise measurement of their convergence. The proposed method is based on a local model-to-model comparison method of underground mobile LiDAR point clouds. The results obtained are very promising compared to other LiDAR point cloud comparison methods (e.g. C2C, C2M methods). A statistical analysis of the results also has confirmed the efficiency of the proposed method, especially in the rough areas of the mining tunnels.
v
Table des matières
Résumé du mémoire ... iii
Abstract ... iv
Table des matières ... v
Liste des tableaux ... viii
Liste des figures ... ix
Dédicace ... xiii
Remerciements ... xiv
Introduction ... 1
Chapitre 1 : Présentation du cadre du projet ... 2
1.1 Mise en contexte ... 2
1.2 Problématique ... 5
1.2.1 Problèmes spécifiques de la recherche ... 7
1.3 Question et hypothèse de recherche ... 9
1.4 Objectifs ... 9
1.5 Méthodologie ... 10
Chapitre 2 : Revue littérature ... 14
2.1 Les déformations dans les tunnels ... 14
2.1.1 L’Extrusion ... 15
2.1.2 La convergence relative ... 16
2.1.3 La convergence absolue... 19
2.2 Les technologies de mesure de convergence dans les tunnels ... 21
2.3 Auscultation de la déformation par LiDAR ... 24
vi
2.3.2 Technologies LiDAR (Light Detection And Ranging) ... 24
2.3.3 État de l’art de la surveillance de déformation par LiDAR ... 31
2.3.4 État de l’art de la surveillance de déformation des tunnels par LiDAR ... 35
2.3.5 Possibilités et limites des technologies LiDAR dans la surveillance des déformations des tunnels ... 39
Conclusion ... 41
Chapitre 3 : Méthode proposée pour la détection de convergence ... 42
3.1 Les sources d’erreurs liées aux nuages de points LiDAR affectant l’estimation de changement et la comparaison des nuages de points LiDAR ... 42
3.1.1 L'incertitude liée à la position des points dans le nuage de points ... 43
3.1.2 L’incertitude d'alignement entre les nuages de points ... 45
3.1.3 L’incertitude lié à la rugosité de surface... 47
3.2 Les approches de mesure de changements par les données LiDAR ... 48
3.2.1 Approche modèle à modèle ... 48
3.2.2 Approche nuage à nuage... 50
3.2.3 Approche nuage à modèle ... 53
3.3 Proposition d’un processus de détection de changement adaptif dans les tunnels miniers ... 54
3.3.1 Algorithme détaillé ... 54
3.3.2 Explication du processus proposé... 55
i- Étape 1 : Estimation de la normale ... 55
ii- Étape 2 : calcul de distance... 57
3.3.3 Le calcul d’un intervalle de confiance ... 59
Chapitre 4 : Implémentation et résultats ... 63
vii
4.1.1 Présentation du Plugin de la méthode de comparaison proposée ... 65
4.1.2 Comparaisons nuage à nuage évaluées ... 69
4.1.3 Comparaison nuage à modèle : ... 74
4.2 Définition du cas d’étude ... 75
4.2.1 Spécifications des données de base ... 75
4.2.2 Simulation de la convergence ... 77
4.2.3 Implémentation de la simulation de la convergence... 79
4.3 Résultats de détection de la convergence simulée ... 85
4.3.1 Comparaison par l’approche nuage à nuage ... 86
4.3.2 Comparaison par l’approche nuage à modèle... 89
4.3.3 Détection de convergence en utilisant la méthode multi-échelle proposée .... 91
4.4 Analyse statistique des résultats... 95
4.5 Expérimentation en utilisant des données réelles ... 97
Conclusion et perspectives ... 102
viii
Liste des tableaux
Tableau 4.1: Métadonnées du nuage de points utilisé ... 76
Tableau 4.2 : Illustration des coordonnées originales et des coordonnées converties... 81
Tableau 4.3 : Erreurs des méthodes nuage à nuage ... 88
Tableau 4.4 : Erreurs de la méthode nuage à modèle ... 90
Tableau 4.5 : Erreurs concernant la méthode proposée ... 92
Tableau 4.6 : Tableau statistique ... 96
ix
Liste des figures
Figure 1.1 : La technologie TIMMS de Trimble (source : https://www.applanix.com) ... 3 Figure 1.2 : La technologie UGPS Rapid Mapper de la compagnie Pecktech (https://ugpsrapidmapper.com) ... 4 Figure 1.3 : Déformations au niveau d'une section de tunnel (source : Riaz et al., 2015) ... 6 Figure 1.4 : Surestimation de la distance due à la désorientation de la normale; les flèches pleines représentent les plans d’ajustement à la surface et les flèches pointillées représentent les normales estimées à la surface ... 8 Figure 1.5 : Diagramme d'activités représentant la méthodologie de recherche ... 13 Figure 2.1 : Déformations au niveau d'une section de tunnel (source : http://gramme.be) .. 15 Figure 2.2 : Extrusion et convergence au niveau des tunnels ... 16 Figure 2.3 : Mesure de convergence relative par des distancemètres (source : Dossier pilote des tunnel, 1998)... 18 Figure 2.4 : Exemple de courbes de convergence déduite de la mesure de convergence relative par chainage en utilisant des points de contrôle fixes 1, 2, 3, 4 et 5 (Barla et al., 2008) ... 19 Figure 2.5 : Mesure de convergence absolue (source : Dossier pilote des tunnel, 1998)... 20 Figure 2.6 : Mesure de la convergence en utilisant des réflecteurs optiques (Schubert et al., 2002) ... 22 Figure 2.7 : Principe de l’écholocation (Schorsch, 2005) ... 25 Figure 2.8 : Schéma du principe de fonctionnement du LiDAR (Limahn, 2014, Wikipédia) ... 26 Figure 2.9 : Exemples de capteurs LiDAR mobile existants ... 28 Figure 2.10 : Exemple de nuage de points acquis par le uGPS Rapid Mapper dans une galerie montante ... 29 Figure 2.11 : Le capteur mobile uGPS Rapid Mapper ... 30
x
Figure 2.12 : Le système uGPS Rapid Mapper ... 31
Figure 2.13 : Cartes des déformations de la face en aval du Barrage, les points verts et jaunes représentent les grandes déformations du barrage (Alba et al., 2006)... 33
Figure 2.14 Ajustement cylindrique du nuage de points (Van Gosliga et al., 2006) ... 36
Figure 2.15 : Conversion des coordonnées cartésiennes en coordonnées cylindriques (Van Gosliga et al., 2006) ... 36
Figure 2.16 : Mesure de distance entre les deux nuages de points; MDP signifie ‘minimum distance projection’ (Han et al., 2013) ... 38
Figure 2.17 : Simulation d'une déformation en utilisant un bâton en bois fixé sur la paroi du tunnel (Han et al., 2013) ... 38
Figure 3.1 : L’exactitude vs la précision des mesures (source: 3dlasermapping.com) ... 44
Figure 3.2 : Illustration de l’alignement des nuages de points (source : Gelfand et al., 2005) ... 46
Figure 3.3 : Illustration de l’influence de l’erreur d’alignement des nuages de points LiDAR d’une portion d’un tunnel minier ... 46
Figure 3.4 : Influence de la rugosité sur l’estimation de l’orientation de la normale à la surface ... 48
Figure 3.5 Illustration de la comparaison modèle à modèle ... 49
Figure 3.6 : Mesure de distance nuage à nuage moyennant du voisin le plus proche ... 51
Figure 3.7: Illustration de l’approche nuage à modèle face à l’approche nuage à nuage ... 53
Figure 3.8 : Mesure d’une distance par L'algorithme M3C2 (Barnhart et al., 2013) ... 55
Figure 3.9 : Estimation de la normale dans la méthode proposée ... 57
Figure 3.10 : Calcul de distance par le biais de la méthode proposée ... 58
Figure 3.11: Cas de figure de la désorientation de la normale due au choix de la valeur de l’échelle de la normale D ... 59
xi
Figure 4.1 : Les méthodes implémentées expérimentées dans le cadre de notre cadre d'étude
... 64
Figure 4.2 : Paramètres principaux de la méthode proposée pour la détection de la convergence ... 66
Figure 4.3 : Paramètres avancés de l’estimation de la normale; ‘Onglet Normales’ ... 67
Figure 4.4 : Paramètres avancés optionnels de la méthode proposée ... 68
Figure 4.5 : Choix d’export de données en sortie ... 69
Figure 4.6 : Comparaison nuage à nuage ... 69
Figure 4.7 : Principe de la structure Octree (Girardeau-Montaut et al., 2005) ... 70
Figure 4.8 : Principe de la distance au plus proche voisin selon la distance de Hausdorff (source : wikipédia.com) ... 72
Figure 4.9 Interface de la méthode de comparaison nuage à modèle ... 74
Figure 4.10 : Extrait du nuage de points de référence utilisé acquis par le capteur LiDAR mobile uGPS Rapid Mapper ... 76
Figure 4.11 : Cas de figures de déformations des tunnels (Pinto et al., 2006) ... 78
Figure 4.12 : Déformation sous le mode 'Squeezing' (lynch et al., 2017) ... 79
Figure 4.13 : Déformation sous le mode 'Sagging' (lynch et al., 2017) ... 79
Figure 4.14 : Diagramme des étapes d’implémentations de la simulation de la convergence ... 80
Figure 4.15 : Illustration des coordonnées originales et des coordonnées converties de la première ligne de scan ... 81
Figure 4.16 : Simulation de la convergence suivant le mode squeezing ... 83
Figure 4.17 : Simulation de la convergence suivant le mode sagging ... 84
Figure 4.18 : Simulation exagéré de 0,5 mètres suivant le mode Squeezing ... 85
Figure 4.19 : Visualisation du nuage de points de référence et du nuage de points simulé . 86 Figure 4.20 : Détection de convergence du tunnel par les méthodes nuage à nuage ... 87
xii
Figure 4.21 : Influence de la rugosité sur la mesure de distance nuage à nuage ... 88
Figure 4.22: Distribution de l'erreur le long de la ligne de scan d'origine de la méthode nuage à nuage ... 89
Figure 4.23 : Détection de la convergence par méthodes nuage à modèle ... 90
Figure 4.24 : Détection de convergence par la méthode multi-échelle proposée en utilisant des paramètres optimaux ... 91
Figure 4.25 : Détection de convergence par la méthode proposée en utilisant des paramètres non satisfaisants ... 92
Figure 4.26 : Distribution de l'erreur le long de la ligne de scan d'origine en utilisant la méthode proposée ... 93
Figure 4.27 : Diagramme de comparaison des erreurs entre la méthode proposée et la méthode nuage à nuage avec modélisation quadrique ... 93
Figure 4.28 : Visualisation des zones de changement significatif ... 95
Figure 4.29 : Les nuages de points après l'alignement ... 98
Figure 4.30: Les matrices de transformation résultant des alignements effectués ... 99
Figure 4.31 : Visualisation des changements significatifs entre les nuages 01 et 02 ... 100
Figure 4.32 : Visualisation des changements significatifs entre les nuages 01 et 03 ... 100
xiii
Dédicace
Aux nombreuses personnes qui m’ont permis d’en arriver là en particulier à mes parents. J’ai beau essayer mais je n’ai pas pu trouver les mots pour exprimer mon respect et ma profonde gratitude envers les meilleurs parents du monde pour l'éducation qu'ils m'ont prodiguée; avec tous les moyens et au prix de tous les sacrifices qu'ils ont consentis à mon égard, pour le sens du devoir qu'ils m’ont enseigné depuis mon enfance.
xiv
Remerciements
Au terme de ce travail de recherche, je tiens à exprimer ma profonde gratitude et mes chaleureux remerciements à mon directeur de recherche M. Mir Abolfazl Mostafavi pour sa disponibilité, sa collaboration et ses précieux conseils qui m’ont permis d’avancer dans mon projet et d’atteindre mes objectifs.
Je tiens à exprimer mes sincères remerciements et ma forte reconnaissance à M. Christian Larouche, mon codirecteur de recherche, pour son soutien, sa bienveillance, sa serviabilité et son encouragement. J’aimerais également remercier M. Martin Grenon et Mme Mojgan Jadidi d’avoir accepté de faire partie du jury d’évaluation de mon mémoire.
J’exprime également mes sincères remerciements à tous les partenaires du projet MinEyes pour leur soutien et leur collaboration à savoir la compagnie Pecktech, le Centre de Recherche en Géomatique de l’Université Laval, le Centre de Géomatique de Québec et également les Fonds de Recherche sur la Nature et le Développement de Québec (FRQNT) qui financent ce projet dans le cadre du programme de développement durable du secteur minier.
Mes remerciements vont également à Patrick Walther Morales Coayla, professionnel de recherche au Centre de Recherche en Géomatique, pour son aide apprécié lors de la réalisation de ce projet.
Je remercie tout le corps professoral du Département des sciences géomatiques de l’Université Laval pour leurs efforts, leur disponibilité et leur engagement.
Finalement, je tiens à remercier toute personne ayant aidé de près ou de loin à réaliser ce projet de recherche.
1
Introduction
La thématique de ce projet de recherche repose sur trois volets : la détection de changement et de déformations, la convergence des tunnels miniers souterrains et les technologies LiDAR mobiles. Ce projet vise notamment l’amélioration de l’auscultation des déformations dans les galeries minières souterraines par l’utilisation de technologies innovatrices comme les systèmes LiDAR mobiles. Ce mémoire cristallise les travaux de recherche réalisés dans ce cadre et il est divisé en quatre chapitres. Le chapitre 1 permet de présenter le projet de recherche à travers la mise en contexte des travaux réalisés, la problématique, les objectifs et la méthodologie de travail préconisée. Le chapitre 2 présente la revue de littérature reliée au projet y compris la définition des déformations au niveau des tunnels et particulièrement la convergence des tunnels miniers, les méthodes et technologies d’auscultation de la déformation des tunnels miniers puis la présentation des technologies LiDAR. La mesure de déformations à l’aide de ces technologies, spécialement celle du LiDAR mobile, ses possibilités et ses limites sera présentée. Le chapitre 3 décrit les différentes approches de comparaison de nuages de points 3D existantes, leurs limites et les sources d’incertitudes liées à la comparaison de nuages de points LiDAR multi-temporels. Il détaille également la méthode de détection de déformation proposée, son algorithme de base, ses paramètres et ses étapes de réalisation. Le chapitre 4 présente les expérimentations et expose les résultats obtenus en utilisant la méthode de détection de changement proposée. L’analyse de ces résultats sera également présentée, lesquels seront comparés avec ceux obtenus par d’autres méthodes de comparaison de nuages de points en guise de validation des résultats. Ce mémoire s’achève par la conclusion de ces travaux qui permettra de mettre en avant les recommandations et les perspectives du projet.
2
1.
Chapitre 1 : Présentation du cadre du projet
Ce premier chapitre présente le contexte du projet lié à la détection de changements et de déformations par LiDAR mobile pour la prévention de la convergence des tunnels miniers ainsi que la problématique associée au travail réalisé dans le cadre de cette maîtrise. Les objectifs de la recherche et la méthodologie utilisée pour les atteindre sont également abordés. Finalement, une description du contenu de ce mémoire est présentée.
1.1 Mise en contexte
La sécurité étant la première préoccupation des entreprises d’exploitation minière, l’observation et la caractérisation des moindres changements ou déformations dans les tunnels miniers demeurent les principales priorités de ces entreprises et engendrent des problématiques et des enjeux majeurs. Les travaux dans les tunnels (ou les galeries) miniers souterrains s’exposent à de risques graves et fréquents qui doivent faire l'objet d'une analyse poussée des risques pour permettre la mise en œuvre des mesures de prévention, d’intervention et de soutènements adéquats en considérant à la fois l'environnement matériel et technique (outils, machines, produits utilisés) et l'efficacité des moyens de protection existants.
En effet, les travaux souterrains figurent parmi les travaux les plus accidentogènes. En effet, Selon le nombre total de décès compilés par l’ACATC (Association des commissions des accidents du travail du Canada), les industries minières figurent parmi les travaux les plus dangereuses au pays. Dans ce contexte, le principal enjeu est de pouvoir acquérir l’information optimale et pertinente de manière simple, rapide, automatique et sécuritaire qui permet la prévention des risques dans les ouvrages miniers souterrains pour pouvoir intervenir à temps et entreprendre les mesures de soutènement adéquates.
Les techniques traditionnelles de surveillance de la déformation des tunnels miniers se basaient essentiellement sur des mesures ponctuelles et limitées généralement longues et coûteuses par télémètres laser, distancemètres, fil d’invar, arpentage au laser (Cavity
3
Monitoring Survey) ou par des instruments d'arpentage classiques telles que les stations totales et gyroscopes (mesures d'azimuts géographiques).
Toutefois ces techniques traditionnelles présentent plusieurs inconvénients et demeurent consommatrices en termes de temps et d’argent. Jusqu’à présent, l’émergence des technologies LiDAR permet de répondre mieux à cette problématique vue que ces technologies sont relativement moins coûteuses, plus efficaces et permettent l’acquisition du maximum d’informations précises en moins de temps. De plus l’utilisation du LiDAR mobile permet de mobiliser moins de ressources humaines ce qui peut diminuer les dangers causés par le milieu minier souterrain, tout en permettant une couverture plus large dans une marge de temps plus réduite. Les technologies LiDAR mobile qui permettent l’acquisition intérieure sont peu nombreuses mais prometteuses. On donne à titre d’exemples : le système TIMMS (Trimble Indoor Mobile Mapping Solution) de la société Trimble (figure 1.1) qui est adapté aux bâtiments et le système U-GPS Rapid Mapper de la société Peck Tech (figure 1.2) qui est spécialement dédié aux mines souterraines.
4
Figure 1.2 : La technologie UGPS Rapid Mapper de la compagnie Pecktech (https://ugpsrapidmapper.com)
Le présent projet de recherche s’inscrit dans le cadre du projet MinEyes qui consiste au développement et l’optimisation de la technologie LiDAR Mobile pour la modélisation 3D précise et la surveillance de la convergence des tunnels miniers. L’objectif principal du projet MinEyes est d’améliorer les systèmes LiDAR mobiles (SLM) afin de permettre l’observation et la modélisation 3D précises et rapides des tunnels miniers et ainsi faciliter et améliorer les processus de surveillance de ces ouvrages. Ce projet concrétise une étroite collaboration entre le Centre de Recherche en Géomatique de l’Université Laval, le Centre de Géomatique de Québec et la compagnie Pecktech et il est financé par les fonds de recherche sur la nature et le développement de Québec (FRQNT) dans le cadre du programme de Développement durable du secteur minier.
5
1.2 Problématique
Le principe général de détection, de déformation ou de changement géométriques 3D est bien celui de l’identification, de la localisation et de la caractérisation des changements survenus sur un objet ou une zone d’étude quelconque à savoir des déformations, des déplacements, des disparitions ou des apparitions. Les applications de détection de changements sont assez nombreuses. On cite à titre d’exemples :
• le contrôle géométrique et structurel des ouvrages d’art de génie civil • le suivi des chantiers
• la cartographie d’urgences (diagnostic des dommages, analyse de l’état des voies d’accès, planification des secours, détection des effondrements potentiels, suivi de chantier de déblaiement…)
• le suivi et la caractérisation du développement urbain • la surveillance des conditions écologiques
• l’agriculture, le suivi des cultures.
Certes dans le contexte minier, le creusement d’une excavation souterraine entraîne des changements dans les roches entourant l'excavation sous forme de déformation mécanique localisée ou d’altération de la répartition des contraintes ou de changements dans le débit d'eau et des propriétés hydrauliques de la masse rocheuse environnante.
La convergence est une forme des déformations dans les tunnels. Pendant l'excavation du tunnel, la convergence est une tendance à la réduction de la section du vide formé et elle est observée en raison de la redistribution des contraintes autour de la surface libre de l'excavation. Cette déformation s'accumule avec une décroissance progressive jusqu'à l'obtention d'un niveau d'équilibre (Riaz et al., 2015), d’où la nécessité de surveiller la convergence des tunnels fréquemment et avec précision.
Le terrain se déforme à deux endroits tel qu’il est illustré sur la figure 1.3. Ces déformations surviennent:
6
• au parois, on parle de convergence qui est un rétrécissement diamétral d’une section de tunnel.
Figure 1.3 : Déformations au niveau d'une section de tunnel (source : Riaz et al., 2015)
Les technologies communément utilisées pour la détection de déformations au niveau des tunnels, à savoir des instruments fixés sur les parois intrados du tunnel sous forme d’extensomètres ou de fils d’invar ou mis en place à l’intérieur des galeries sous forme de scanners lasers ou de stations totales, se basaient essentiellement sur des processus généralement statiques et couteux (Riaz et al., 2015).
Peu d’études ont abordé la détection de changement par LiDAR mobile et plus particulièrement dans le contexte minier souterrain d’où la nécessité de mettre l’accent sur le potentiel de ces technologies dans le domaine par rapport au moyens existants. Certes l’utilisation des technologies LiDAR mobile pour la détection de changement dans les tunnels miniers dispose d’un fort potentiel, cependant elle présente des enjeux à savoir : la
7
précision limitée des nuages de points LiDAR souvent formés de plusieurs millions de points, l’irrégularité de la zone observée, la variabilité de la densité des scans, la variabilité des prises de vue considérant le caractère mobile de ces technologies, la présence d’obstructions ou d’occlusions, le positionnement souterrain et l’alignement des nuages de points.
La comparaison de nuages de points devient de plus en plus complexe dû au volume des données LiDAR ainsi qu’aux exigences de détection de changement en temps réel pour certaines applications (e.g. navigation, robotique) (Loménie, 2007, Ployon et al., 2011). Par conséquent, la méthode de comparaison de nuages de points demeure problématique. En effet, les méthodes de comparaison de nuages de points existantes demeurent assez limitées et peu performantes surtout dans les milieux à surfaces complexes et irrégulières. Il existe tout de même trois approches de comparaison de nuages de points. L’approche modèle à
modèle se base sur la génération de modèles des deux nuages de points comparés puis du
calcul de distance entre ces deux modèles cellule par cellule du modèle. La modélisation engendre plusieurs sources d’erreurs et d’incertitudes. La deuxième approche est l’approche
nuage à nuage, laquelle n’a recours ni à la modélisation ni au calcul de normales. Elle
demeure la méthode la plus simple et la plus rapide mais la moins efficace. La troisième approche est l’approche nuage à modèle. Le changement est mesuré par le calcul de la distance entre un nuage de point et un modèle 3D de référence.
1.2.1 Problèmes spécifiques de la recherche
Vu que la détection de changements et de déformations par LiDAR mobile exige la comparaison de nuages de points multi-temporels, cela exige l’alignement ou le calage des nuages de points, opération qui reste difficile à réaliser dans un milieu souterrain ou le positionnement absolu est compliqué, voire impossible. Par conséquent, la différentiation de l’erreur et du vrai changement demeure également problématique.
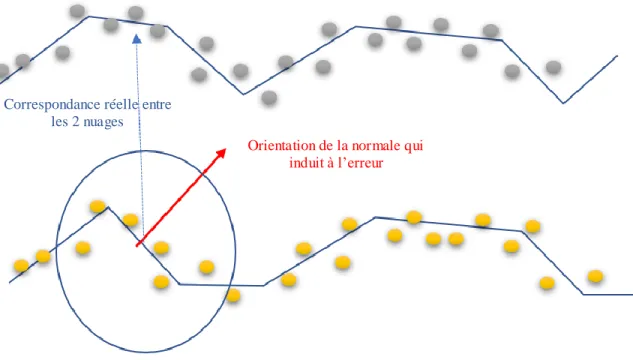
Par ailleurs, un des enjeux de comparaison des nuages de points dans les environnements complexes dépend de l’estimation de la normale ou la détermination de l’orientation de mesure de changement entre les deux nuages de points. La désorientation de la normale due à la rugosité d’une surface peut causer une surestimation de la distance ou du changement tel qu’illustré à la figure 1.4.
8
Figure 1.4 : Surestimation de la distance due à la désorientation de la normale; les flèches pleines représentent les plans d’ajustement à la surface et les flèches pointillées représentent les normales
estimées à la surface
L’estimation de la normale à la surface est l’une des étapes importantes dans le traitement de nuages de points en général et dans la comparaison de nuages de points multi-temporelles en particulier. Dans les surfaces rugueuses ou surfaces irrégulières, l’estimation de la normale demeure de plus en plus complexe. De plus, les méthodes existantes ne prennent pas en compte la rugosité et ne s’adapte pas aux irrégularités de la surface.
9
1.3 Question et Hypothèse de recherche
La question de recherche peut être formulée ainsi : Comment élaborer un processus de détection de changement - y compris la méthode de comparaison de nuages de points - efficace et adaptée aux données LiDAR mobile dans le contexte des tunnels miniers souterrain qui prend en considération la complexité de surfaces des tunnels miniers ?
L’hypothèse fondamentale qui a conduit à cette recherche est la suivante : « Une méthode de comparaison de nuages de points adaptive basée sur l’algorithme de ‘comparaison modèle
à modèle multi-échelle’ (Lague et al., 2013) laquelle permet une détection plus efficace des
changements au niveau des tunnels miniers souterrains en utilisant des nuages de points LiDAR Mobile. » La méthode proposée permet en premier lieu de mesurer la rugosité locale au voisinage d’un point du nuage de points pour ensuite estimer la normale à la surface locale conformément à cette rugosité et enfin mesurer la distance au voisinage de ce point et suivant la normale préalablement estimée.
1.4 Objectifs
Compte tenu de la problématique, l’objectif général de ce projet de maitrise est l’amélioration de la détection de changement et l’analyse de déformation par LiDAR Mobile pour des fins d’estimation de la convergence des tunnels miniers souterrains permettant le meilleur rapport coût-qualité-sécurité. Afin de réaliser l’objectif global de cette recherche, les objectifs spécifiques suivants ont été définis :
• Effectuer l’inventaire et l’analyse des méthodes de détection de changement existantes en explorant l’état de l’art de la détection de changement par LiDAR en général et en passant en revue les approches de comparaison de nuages de points en les comparant et en évaluant leur potentiel dans les milieux souterrains rugueux tels que les tunnels miniers.
• Adapter une méthode multi-échelles adaptative à notre contexte d’étude, une méthode robuste de comparaison de nuage de points basée sur l’algorithme de ‘comparaison
10
modèle à modèle multi-échelle’ qui estime la normale à la surface d’une manière
conforme à la rugosité locale et mesure la distance locale suivant la normale préalablement estimée.
• Expérimenter cette méthode proposée en premier lieu en comparant un nuage de points d’un tunnel réel et un nuage de point qui comprend une convergence simulée puis comparer par rapport à différentes méthodes existantes pour des fins d’évaluation et dans un deuxième lieu en utilisant des nuages de points multi-temporels présentant une vraie convergence.
• Valider les résultats au moyen d’une analyse statistique basée sur une estimation de l’erreur de la méthode proposée et celle d’autres méthodes expérimentées lors de la réalisation du projet.
1.5 Méthodologie
L’approche préconisée pour mener à bien le projet s’articule sur 3 phases en mutuelle interconnexion, lesquelles sont présentées dans les sections suivantes et illustrées à la figure 1.5.
Phase 1 : Revue de littérature
La revue de littérature, première phase de réalisation d’un projet, conditionne sa réussite dans la mesure où elle définit les besoins réels de ceux qui vont utiliser le résultat final. Phase de communication et d’échange, elle est souvent le reflet du résultat final. Il conviendra donc d’y définir précisément et conjointement le périmètre du projet, de cibler où se situe la difficulté pour identifier les mesures à entreprendre pour vérifier l’hypothèse et répondre ainsi à la problématique.
Cette phase comprend alors la réalisation d’un inventaire des méthodes de comparaison de nuages de points existantes et l’identification des possibilités et des limites qu’elles présentent dans le contexte de l’étude pour ainsi mettre en évidence la pertinence de la méthode multi-échelle proposée.
11
Phase 2 : Proposition d’une méthode multi-échelle de mesure de convergence
Une deuxième phase d’analyse théorique comprend la compréhension des trois grandes approches de comparaison de nuages de points 3D (nuage à modèle, nuage à nuage et modèle à modèle) et l’évaluation théorique de ces méthodes. Les sources d’incertitudes liées à la comparaison des nuages de points 3D, à savoir l’incertitude d'alignement des nuages de points, l’incertitude liée à la rugosité de surface due à la difficulté de réoccuper exactement la même position de balayage et l'incertitude de position des points dans les nuages de points. Cette phase explique davantage la méthode de comparaison de nuage de points proposée et son application dans le domaine des mines souterraines en utilisant des données LiDAR mobile. On y présente l’algorithme et les étapes nécessaires à la réalisation de ce processus de comparaison de nuage de points et des différents paramètres qui y interviennent, pour enfin la positionner par rapport aux méthodes existantes.
Phase 3 : L’implémentation de la méthode proposée et l’analyse des résultats
Afin d’effectuer une analyse efficace et contrôlée des méthodes de comparaison de nuages de points, nous avons opté pour la simulation de la convergence, et ce pour nous assurer que la méthode fonctionne correctement et qu’elle réponde parfaitement aux besoins initialement tracés pour vérifier et évaluer ainsi la pertinence des résultats et confirmer la qualité de la solution proposée.
Une fois la méthode de comparaison de nuages de points spécifiée, nous avons procédé à l’expérimentation de notre solution par le biais de données sous forme de nuages de points LiDAR acquis par la plateforme uGPS Rapid Mapper de la compagnie PeckTech et de données simulées de convergence de 10 cm basées sur ces nuages de points de référence.
Cette phase inclut également l’expérimentation de la comparaison du nuage de point de référence et du nuage de points simulé par différentes méthodes nuage à nuage (C2C ou cloud to cloud) ou nuage à maillage (C2M ou cloud to mesh) implémentées dans le logiciel open source CloudCompare. En effet, tel qu’initié en 2004 dans le cadre d’une thèse issue de la collaboration de Telecom ParisTech et EDF R&D, CloudCompare est un logiciel de
12
traitement et de comparaison de nuages de points 3D dense qui avait comme objectif initial la détection et la visualisation des différences entre des nuages de points. Aujourd’hui, la plateforme a largement évolué pour devenir un projet indépendant, libre, gratuit et une référence dans le traitement de nuages de points. En opérant dans le même contexte de détection de changement, ce logiciel permettra d’évaluer et de positionner la solution proposée par rapport aux solutions existantes.
Ainsi cette expérimentation a permis d’effectuer une comparaison des méthodes de détection de changement basée sur une analyse statistique permettant de mesurer l’erreur de chaque méthode et ainsi isoler la méthode la plus efficace dans le contexte de cette recherche. De plus, afin de bonifier notre travail de recherche, nous avons également réalisé des expérimentations en utilisant des données multi-temporelles présentant une convergence réelle pour évaluer de plus près l’application de la méthode proposée dans notre contexte d’étude. Finalement, la dernière étape du projet présente les conclusions et perspectives qui permettent la confirmation de l’atteinte des objectifs de notre projet et l’ouverture vers d’autres perspectives de recherche.
13
14
2.
Chapitre 2 : Revue littérature
Ce chapitre présente une revue bibliographique entourant le sujet de ce projet de recherche, et ce à travers la définition des différents types de déformations au niveau des tunnels y compris la convergence des tunnels ainsi que la présentation des technologies utilisées pour l’auscultation de la convergence des tunnels. Ce chapitre présente aussi une synthèse des travaux de recherche dans le domaine de la surveillance des structures par LiDAR et spécialement pour le monitoring des tunnels. Ce chapitre fait également une présentation des technologies LiDAR statique et mobile et leur principe de fonctionnement ainsi que leurs possibilités et limites dans la surveillance des déformations des tunnels miniers souterrains.
2.1 Les déformations dans les tunnels
Lorsque l’on creuse un tunnel, on parle d’excavation. Étant donné qu’un massif rocheux est initialement comprimé sous l’action des contraintes naturelles, le creusement d’une excavation va perturber cet état de contraintes, il en résultera un mouvement des terrains appelés mouvement induit (Fine, 1998).
Tel qu’il a été mentionné au début dans le chapitre précédent, lors de l’excavation, le terrain se déforme à deux endroits (figure 2.1) :
• au niveau la partie frontale du tunnel, appelée front de taille ou front d’avancement, dans ce cas il s’agit d’extrusion;
• au niveau des parois, dans ce cas on parle de convergence dont la mesure est l’objet de ce projet de recherche.
15
Figure 2.1 : Déformations au niveau d'une section de tunnel (source : http://gramme.be)
Ainsi, on distingue différentes mesures de déformations dans les tunnels. Les sections suivantes décrivent plus en détails ces déformations.
2.1.1 L’Extrusion
L’extrusion est le déplacement longitudinal du noyau d’avancement, en avant du front de taille du tunnel (figure 2.2), en raison de la réduction du confinement quand le front de taille s’approche’ (Manh et al., 2014). Cette déformation dépend du comportement rhéologique du matériau du terrain; c’est à dire du comportement causé par la déformation et l'écoulement de la matière sous l'effet d'une contrainte appliquée, du comportement mécanique, de la couverture et de la méthode de renforcement du noyau d’avancement autour de la section.
En génie civil, la mesure d’extrusion se fait avec un extensomètre d’une longueur équivalente à deux à trois fois le diamètre du tunnel installé au centre du front de taille dans la direction du tunnel et des plots de convergence (environ 8) sur le front de taille pendant les phases d’arrêt du front (Manh et al., 2014).
16
Figure 2.2 : Extrusion et convergence au niveau des tunnels
2.1.2 La convergence relative
La mesure de convergence est l’opération la plus courante dans le domaine d’auscultation des déformations des tunnels (ou galeries) souterrains. Elle se concrétise généralement par la mesure de variation de distance.
En effet, la convergence relative est la variation de la distance entre deux points situés sur la paroi intrados du tunnel et diamétralement opposés. Elle consiste en ‘la mesure de la variation de la distance entre deux points, matérialisés par des repères fixés en paroi de l’excavation, au soutènement ou au revêtement’ (Manh et al., 2014).
Sous la forme mathématique, la convergence relative est définie par :
C (t) = D0− D(t) Eq (2.1)
Convergence
Extrusion
17
Où C(t) est la convergence en fonction du temps entre deux points de la paroi, D0 est la
distance initiale et et D(t) est la distance mesurée au temps ‘t’.
Généralement, on mesure la convergence verticale du tunnel, c’est-à-dire le rapprochement du toit et du sol du tunnel mais on peut également avoir de l’intérêt pour la mesure du rapprochement des deux parements qui représente la convergence horizontale.
Selon Sulem et al., 1994, la convergence dépend de deux facteurs :
• Le comportement rhéologique du matériau : les changements et les déformations au niveau des tunnels sont dites différées qui évoluent en fonction du temps. En effet vue que le comportement des roches suit généralement des lois viscoélastiques ou viscoplastiques ou élastoplastiques, leur déformation n’apparait pas directement après être décomprimées ou surchargées.
• L’avancement du front de taille : l’influence du front de taille est prédominante à sa proximité et au-delà d’une certaine distance, la convergence dépendra seulement du comportement des roches. Il est à noter qu’au-delà d’une distance égale à deux fois le diamètre de la galerie minière, le front de taille n’aura plus d’effet sur les déformations des tunnels.
En effet, les travaux de Panet, 1979 sont les premiers à initier que la convergence peut s’écrire sous la forme suivante découplant l’effet d’avancement du front de taille 𝐶1(𝑥) et du comportement rhéologique du milieu 𝐶2(𝑡) :
𝐶(𝑥, 𝑡) = 𝐶1(𝑥) + 𝐶2(𝑡) Eq (2.2)
De plus, selon Sulem (1994) :
𝐶(𝑥, 𝑡) = 𝐶∞𝑥[1 − ( 𝑋 𝑥 − 𝑋) 2 ] {1 + 𝑚 [1 − ( 𝑇 𝑡 + 𝑇) 𝑛 ]} Eq (2.3) où :
18
• t est le temps depuis le passage du front de taille ;
• T est un temps caractéristique du comportement différé du terrain ;
• X est un paramètre homogène à une longueur, dépendant de l’extension de la zone plastique, ainsi que de la distance d’influence du front de taille, avec X = 0,84rp (rp
est le rayon plastique) ;
• C∞x est la convergence instantanée pour un avancement infiniment rapide ;
• m est le rapport entre la convergence différée et la convergence instantanée; • n est un paramètre qui est souvent fixé à 0,3.
La méthode utilisée pour la mesure de convergence relative est soit à la canne télescopique ou cannes de convergence pour les petites galeries soit au moyen d'un distancemètre à fil invar (figure 2.3) ou à ruban ou par méthode optique pour les plus grandes sections. La figure 2.4 ci-après présente un exemple de courbes de convergence déduite de la mesure de convergence relative par chainage en utilisant des points de contrôle fixes. Notons que nous allons présenter les méthodes d’auscultation de la convergence des tunnels plus loin dans ce chapitre.
Figure 2.3 : Mesure de convergence relative par des distancemètres (source : Dossier pilote des tunnel, 1998)
19
Figure 2.4 : Exemple de courbes de convergence déduite de la mesure de convergence relative par chainage en utilisant des points de contrôle fixes 1, 2, 3, 4 et 5 (Barla et al., 2008)
2.1.3 La convergence absolue
Il s’agit du déplacement d’un point de la paroi du tunnel dans la direction perpendiculaire à la paroi. Par exemple pour un tunnel de forme circulaire, il s’agit d’un déplacement radial ou de la variation de distance entre un point de la paroi du tunnel et un point situé à l’extérieur du tunnel dans la direction perpendiculaire à la paroi tel qu’illustré à la figure 2.6. Il est important de signaler que cette mesure est plus difficile à effectuer car il faut disposer d’un point de référence situé loin de la zone d’influence du tunnel et supposé immobile (Manh et al., 2014).
Le mouvement des terrains induit par le creusement d’une excavation souterraine provoque la création d’une zone décomprimée au voisinage du tunnel. La mesure de la convergence absolue permet la mesure à l’intérieur du massif rocheux du déplacement d’un point de la paroi par rapport à une référence fixe loin de la zone d’influence de l’excavation. Ainsi le déplacement d’un point dans cette zone peut être décomposé suivant trois directions: longitudinale, radiale et tangentielle et permet d’analyser le comportement de la zone décomprimée.
20
La mesure est effectuée soit manuellement à l’aide d’une jauge de profondeur ou d’un comparateur (extensomètre manuel à tiges), soit avec des capteurs de déplacement reliés à une centrale de mesure (extensomètre à tiges avec capteur). En effet, la mesure de la convergence « absolue » se base généralement sur l’utilisation des extensomètres de forage mis en place depuis la paroi du tunnel dans des forages radiaux selon différentes orientations tel qu’il est illustré sur la figure 2.5 ci-après.
Figure 2.5 : Mesure de convergence absolue (source : Dossier pilote des tunnel, 1998)
La convergence représente un risque majeur au niveau des tunnels miniers. En effet, en l’absence des mesures de soutènement du tunnel, deux cas de figures se présentent :
• une stabilité de la convergence due à une évolution de la convergence vers une valeur asymptotique;
21
2.2 Les technologies de mesure de convergence dans les tunnels
Il existe de nombreuses technologies pour mesurer la convergence des parois intrados du tunnel, à savoir les extensomètres à ruban, les levés par stations totales ou d'autres méthodes géodésiques et les profileurs laser. Il existe également des technologies photogrammétriques ou des dispositifs de balayage vidéo (Delaloye et al., 2012, Kavvadas et al., 2005, Hashimoto et al., 2006, Gay et al., 2013 etc). Les mesures de déformation sont généralement effectuées pendant le creusement de l’excavation, et même parfois poursuivies bien après la fin de la construction si les déformations ne se sont pas stabilisées (Kontagianni and Stiros, 2005).
Traditionnellement, la déformation dans les tunnels a été mesurée en utilisant des extensomètres ou des fils d’invar, qui fournissent le déplacement relatif entre deux points. Avec l'avènement des nouvelles technologies d’arpentage telles que les stations totales, les distances peuvent être facilement mesurées et les déformations peuvent même être géoréférencées donc liées à des systèmes de coordonnées externes. (Delaloye, 2012).
Les extensomètres à ruban sont les plus précis de toutes les technologies de surveillance de la déformation communément utilisées avec une précision allant jusqu’à +/- 0,2 mm sur 10-15 m du tunnel (Dunnicliff, 1993). Cependant, le principal inconvénient de l’utilisation des extensomètres à ruban est qu'ils ont seulement la capacité de mesurer le mouvement le long d'une ligne spécifique. Ils doivent également être installés en permanence sur les parois du tunnel, ce qui interrompt toute activité le long de la section du tunnel. (Kavvadas, 2005). De plus ces techniques exigent l’intervention des ressources humaines et le temps alloué à ces opérations demeure important.
L’analyse de la déformation en utilisant des stations totales utilise des réflecteurs optiques installés autour du profil du tunnel, généralement de cinq à sept points, ainsi qu'un point de référence stable en dehors de la zone de convergence pour mesurer les déformations. La station totale doit être déplacée progressivement de l'emplacement des points de référence stables vers le front de taille du tunnel, au fur et à mesure de son avancement. L’utilisation des stations totales ont une précision d'environ +/- 2,5 mm sur 100 m (Kavvadas, 2005). De
22
nos jours, les stations totales de Leica à titre d’illustration, ont pu atteindre une précision de mesure de distance de 1,5 mm + 2ppm sur 1500m. La figure 2.6 présente un exemple des vecteurs de déplacement de cinq points de contrôle sur une coupe transversale pour montrer le mouvement vertical, et sur une coupe longitudinale pour montrer la translation latérale (Schubert et al., 2002).
Figure 2.6 : Mesure de la convergence en utilisant des réflecteurs optiques (Schubert et al., 2002)
En termes de technologies photogrammétriques, elles exigent qu’un certain nombre de points de référence soient installés sur la surface du tunnel. Les dispositifs photogrammétriques, où la position de la caméra est obtenue à l'aide d'une station totale, ont une précision d'environ +/- 5 mm. Ces technologies considèrent des cibles sur trois lignes de mesures pour chaque point de mesure. En effet, pour la reconstruction du modèle 3D du tunnel, trois images ou plus doivent être obtenues à chaque point, sur les deux dernières lignes de mesure, six cibles se chevauchent continuellement pour reconstruire des modèles 3D afin que six ou plus d'entre eux puissent être partagés par deux modèles 3D (Kim et al., 2008)
Il existe également des méthodes de surveillance de la déformation des tunnels ou galeries souterraines en utilisant des dispositifs d’auscultation vidéo pour l’observation détaillée. Cette méthode permet de réaliser un balayage vidéo et photo précis ainsi que des mesures de trajectoire, de plus ces mesures peuvent être couplées à une station totale afin que
23
les mesures soient géoréférencées. Cependant ces méthodes demeurent très couteuses. (Gay et al., 2013).
Hashimoto et al., 2006 ont développé un système de surveillance de la convergence réalisé par l'assemblage de bielles, de jauges de déplacement et d’inclinomètres fixés à l'intérieur d'un revêtement de tunnel pour surveiller sa déformation dans le sens de la section transversale. Cette méthode a donné des résultats précis toutefois elle nécessite l'installation permanente des dispositifs de mesure.
Les méthodes d’auscultation des déformations et de surveillance de convergence au niveau des tunnels diffèrent en termes de technologies d’acquisition de données, de types et formats de données acquises, de processus de mesure et de traitements de données, de précision de mesure et également du temps et du coût de mise en œuvre.
Certes chaque méthode présente des avantages et des inconvénients liés à la méthode, cependant, la majorité de ces méthodes existantes se basent sur des processus statiques ou fixes qui nécessitent l’utilisation de technologies statiques à savoir des stations totales ou des technologies photogrammétriques ou même des dispositifs installés d’une manière permanente sur la parois des tunnels chose qui non seulement interrompt le mouvement au niveau des tunnels mais nécessite également l’intervention des ressources humaines. De plus, par l’utilisation de technologies statiques, la mesure de déformation est limitée seulement au long de la direction des lignes de mesure, dans ce cas le choix des directions de mesure demeure également problématique et influence la mesure de déformation. Il est à noter que malgré l’existence de processus assez sophistiqués comme le balayage vidéo mais ces techniques demeurent coûteuses.
De ce fait, la détection de convergence au niveau des tunnels miniers souterrains nécessite l’utilisation de technologies de mesure plus détaillées, rapides et précises qui permettent d’avoir le meilleur rapport qualité coût et à même d’assurer la sécurité durant la mise en œuvre.
24
2.3 Auscultation de la déformation par LiDAR
2.3.1 IntroductionLa détection des changements et la surveillance de la déformation constituent un domaine de recherche en effervescence et actif dans plusieurs disciplines à savoir l'arpentage et la surveillance des structures et des ouvrages d’art de génie civil. Par ailleurs, ces dernières années, la capacité des systèmes LiDAR à fournir des données tridimensionnelles à haute résolution spatiale de façon rapide et précise a attiré l’attention des spécialistes de ces domaines en termes de monitoring des déformations. La section suivante présente le principe de fonctionnement des technologies LiDAR terrestres en général et les spécificités de la technologie uGPS Rapid Mapper en particulier. Elle expose ensuite l’état de l’art de la surveillance de déformation structurelle par LiDAR et spécialement dans les tunnels souterrains. Cette section présente également les avantages et limites de l’utilisation des technologies LiDAR mobile dans la détection de changement et l’analyse de déformations dans les tunnels souterrains.
2.3.2 Technologies LiDAR (Light Detection And Ranging)
2.3.2.1 Principe de fonctionnement du LiDAR
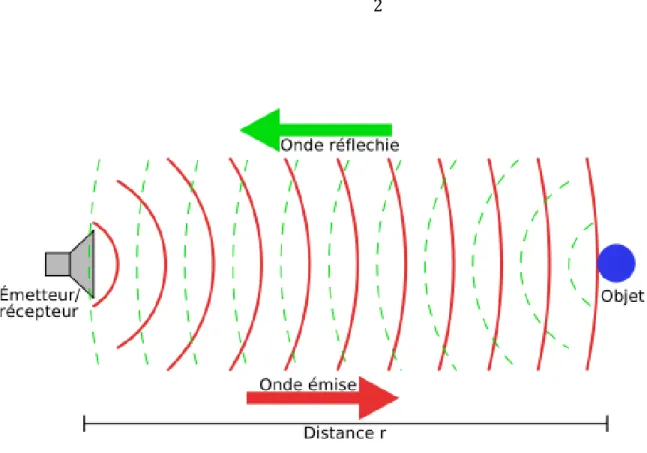
Connu sous l’accronyme LiDAR (Light Detection and Ranging) ou LaDAR (Laser Detection and Ranging), les technologies LiDAR sont des technologies qui font partie des capteurs actifs. Le LiDAR est une technique de mesure basée sur le principe de l’écholocation (figure 2.7) qui consiste en l’émission et le retour d’ondes lumineuses à des longueurs d'onde courtes (ultraviolet, visible, proche et moyen infrarouge). La distance est donnée par la mesure du temps mis entre l’émission des impulsions lumineuses et leur retour à l’appareil de mesure, divisé par la vitesse de la lumière. Les appareils modernes de mesure LiDAR émettent généralement jusqu’à 1 million de pulsions par seconde et même plus. En effet, ayant la position et l'orientation de la plateforme de scan laser et l’intervalle de temps qui sépare l’émission de l’impulsion laser du signal retour après rétrodiffusion, la distance est donnée par la formule suivante :
25
𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑒 = 𝑣𝑖𝑡𝑒𝑠𝑠𝑒 𝑑𝑒 𝑙𝑎 𝑙𝑢𝑚𝑖𝑒𝑟𝑒 × 𝑖𝑛𝑡𝑒𝑟𝑣𝑎𝑙𝑙𝑒 𝑑𝑒 𝑡𝑒𝑚𝑝𝑠 2
Figure 2.7 : Principe de l’écholocation (Schorsch, 2005)
Un appareil LiDAR est un système opto-électronique composé d’un émetteur laser, d’un récepteur comprenant un collecteur de lumière et un photodétecteur qui transforme la lumière en signal électrique, et une chaîne électronique de traitement du signal qui extrait l’information recherchée tel qu’il est illustré sur la figure 2.8 suivante :
26
Figure 2.8 : Schéma du principe de fonctionnement du LiDAR (Limahn, 2014, Wikipédia)
2.3.2.2 Technologies LiDAR statique
Les scanners LiDAR statiques sont des instruments sophistiqués qui fonctionnent un peu comme les stations totales à grande vitesse et qui collectent des nuages de points LiDAR à partir d'un emplacement statique. Généralement, le capteur LiDAR est monté sur un trépied ou un appareil stationnaire et il s’agit d’un système de télémétrie laser et d’imagerie entièrement portable. Le LiDAR statique recueille des points très denses et précis, qui permettent d'identifier précisément les objets. La technologie LiDAR statique contribue à des applications d'arpentage et de cartographie telles que la vérification de la construction, la collecte de données géologiques et la planification minière.
27 2.3.2.3 Technologies LiDAR mobile
L'industrie du LiDAR mobile est émergente à un rythme rapide. Les systèmes LiDAR mobiles sont des capteurs LiDAR généralement monté sur une plateforme mobile (avion voiture, rails, camion, …). Ils présentent plusieurs avantages notamment la rapidité de la capture de données, l’amélioration en termes de productivité, efficacité et sécurité. La vitesse d'acquisition des données LiDAR mobile par rapport aux méthodes de balayage laser statique ou traditionnelles est nettement plus rapide. En plus de rassembler rapidement d'énormes volumes de données de nuages de points, les instruments de numérisation mobiles sont souvent associés à des caméras numériques pour créer des nuages de points colorés représentant la réalité de la zone observée.
Un système mobile est généralement composé de :
• Capteur LiDAR qui mesure la portée, les angles et l’intensité et génère les nuages de points,
• Caméra numérique haute résolution ou panoramique (360°) qui permet de capturer des séquences d’images,
• Récepteur GNSS qui mesure la position géographique,
• Centrale Inertielle (IMU) qui permet l’estimation du positionnement relatif par la mesure de l’orientation, de la vitesse et de la position du capteur,
• Instrument de mesure de distance (DMI) qui permet d’assister la centrale inertielle en cas de perte de signal GNSS.
Plusieurs Systèmes LiDAR mobile existent dans le marché, on donne à titre d’exemples tel que présenté sur la figure 2.9 : le capteur VLS-128 de Velodyne LiDAR, Si-Track de la compagnie Leica Geosystems, RIEGL VMX-250 de la compagnie Riegl, la solution Zeb-Revo de Géoslam et uGPS Rapid Mapper de la compagnie Pecktech lequel est utilisé dans cette étude. L’exactitude des capteurs LiDAR mobiles varie généralement entre ±5mm et ±100mm, dans la section qui suit nous allons présenter plus en détails le système uGPS Rapid Mapper.
28
Figure 2.9 : Exemples de capteurs LiDAR mobile existants a - VLS-128 de Velodyne
b- ZEB REVO de Géoslam
29
2.3.2.4 Exemple de capteurs LiDAR mobile : uGPS Rapid Mapper
La technologie de uGPS Rapid Mapper a été initié en 2008 dans le cadre d’un projet universitaire dirigé par le Dr Joshua Marshall de l’Université de Queen, un projet qui vise à rendre la localisation souterraine aussi précise que par le biais d’un système GPS. Portant un intérêt au potentiel de cette technologie, la compagnie Peck Tech décide d’en faire la commercialisation. Le uGPS Rapid Mapper peut être utilisé dans plusieurs processus à savoir : la planification minière, l’inspection des puits/galeries montantes par l’installation du capteur sur des dispositifs d’acheminement des galeries montantes (figure 2.10), le contrôle géotechnique et la surveillance de la ventilation. (Source : https://ugpsrapidmapper.com)
Figure 2.10 : Exemple de nuage de points acquis par le uGPS Rapid Mapper dans une galerie montante
L'uGPS Rapid Mapper (figure 2.11) est un scanneur laser mobile qui permet l'acquisition rapide de nuages de points 3D. Il est conçu pour les mines souterraines et pour faciliter la saisie des applications de planification minière. Ce capteur est robuste et il peut s’adapter à différentes températures (de -30° à + 60° C), à la poussière et à l'humidité. Le capteur peut facilement s’installer sur la plupart des véhicules utilitaires de mines, exigeant seulement un câble d'alimentation pour l'opération (figure 2.12). Une interface Web intégrée est utilisée pour configurer et contrôler le capteur et peut être accédée à l'aide de tout appareil
30
compatible Web. Les données collectées peuvent être téléchargées via l'interface Web ou auto synchronisées sur un périphérique de stockage USB inséré dans le port USB du scanner.
Figure 2.11 : Le capteur mobile uGPS Rapid Mapper
Ce capteur LiDAR est composé de deux scanners planaires SICK LMS 111 montés orthogonalement l’un à l’autre, ainsi que d’une centrale inertielle (IMU) Microstrain 3dm-gx3 15 permettant le positionnement relatif de l’appareil.
Les scanners SICK LMS111 font des mesures en 2 dimensions, sur un angle de 270º, avec une résolution angulaire de 0.25º à 0.5º, une fréquence de scan de 25 Hz ou 50 Hz et 541 points mesurés par ligne scan. Selon le fabriquant, ce capteur présente une exactitude de mesure de ± 3cm et une divergence du faisceau de 0.86º.
Le uGPS Rapid Mapper est conçu pour répondre aux normes IP67. IP (Ingress
Protection) est un standard établie par la Commission électrotechnique internationale (CEI)
qui classe le niveau de protection qu'offre un matériel aux intrusions de corps solides et liquides.Le premier chiffre du code IP représente le degré de protection contre l’intrusion de corps étrangers solides comme les doigts ou la poussière. Cet indice va de 0 à 6. Le second chiffre du code représente le degré de protection contre l’intrusion de l’humidité avec un indice allant de 0 à 8. IP67 indique une protection totale des contacts avec la poussière, et
31
une protection contre une immersion temporaire jusqu’à 1 m de profondeur pendant 30 minutes.
Figure 2.12 : Le système uGPS Rapid Mapper
2.3.3 État de l’art de la surveillance de déformation par LiDAR
Linderbergh et Pietrzyk (2015) font la distinction entre la détection de changement et l’analyse de déformation, en spécifiant que la détection de changement cherche une réponse binaire, s’il y a eu un changement ou non, tandis que l’analyse de déformations cherche à quantifier et caractériser le changement. Ainsi, dans le cadre de la présente recherche, il s’agit non seulement de la détection de changement mais également de l’analyse de déformations au niveau des tunnels miniers souterrains.
L’observation des tunnels dans le but de surveillance ou le monitoring de la déformation peut être effectuée à différentes périodes. Ensuite, l’identification des changements géométriques se fait en se basant sur les données acquises entre deux époques respectives.
La capacité des systèmes LiDAR à acquérir des données 3D de haute résolution spatiale a pu attirer l’attention des spécialistes du domaine au cours des récentes années. En effet, les systèmes LiDAR ont pu être utilisés dans plusieurs domaines d’ingénierie dont l’analyse de déformation structurale à savoir dans les bâtiments et les ouvrages d’art de génie civil etc. (Abbas et al., 2013).
32
La motivation est que les systèmes LiDAR appliqués à l’analyse de déformation offre plusieurs avantages à savoir : la précision de la mesure de distance (Vezonik et al., 2009), la densité des nuages de points et la minimisation des capteurs et des cibles installées sur la scène observée (Gordon et al., 2003). En effet, de nos jours, les nouvelles générations des capteurs LiDAR peuvent acquérir des nuages de points de haute résolution dans un temps d’observation réduit et avec une densité très élevée. Ces capteurs peuvent réaliser des balayages LiDAR à 360 ° avec une précision millimétrique, une densité qui dépasse 300 000 points par seconde et à des portées allant jusqu'à 100 m (spar3D.com, 2018). Le LiDAR terrestre statique peut atteindre une densité qui dépasse 1000 points par m2 avec une précision
inférieure à 1 mm et le LiDAR mobile offre une densité qui dépasse 100 points par m2 avec
une précision inférieure à 1 cm (IGN et Matis lab, 2013).
Plusieurs études ont traité du sujet d’analyses de déformation des structures à savoir les tunnels, les ponts, les viaducs, les barrages et les tours etc. Alba et al. (2006) présentent des résultats initiaux d’un projet qui traite de la faisabilité de l’analyse des déformations d’un grand barrage en béton par LiDAR terrestre. Les problématiques associées à ce travail de recherche portent sur deux éléments principaux : le premier est la précision et la stabilité du géoréférencement, ce qui est fondamental pour des comparaisons entre des scans multi-temporels ; le second est le calcul de la déformation basé sur les nuages de points acquis. À cet effet, un site d'essai a été établi sur le barrage du lac Cancano en Italie. Celui-ci est constitué d'un réseau géodésique permettant de géoréférencer les données acquises. Un grand nombre de cibles rétro réfléchissantes ont été positionnées et mesurées par une station totale. Certains d'entre eux ont été placés sur la structure du barrage pour servir de points de contrôle indépendants, les autres dans les environs pour servir de points de contrôle au sol. Les mesures ont été réalisées avec deux scanners LiDAR: un Riegl LMS-Z420i à longue portée et un Leica HDS 3000 à moyenne portée. Deux approches d’analyse des déplacements des surfaces ont été présentées : une approche modélise un seul nuage de points ou une autre qui modélise deux nuages multi-temporels. Les résultats obtenus sont sous formes de cartes de déformations de la face aval du barrage tel que présenté sur la figure 2.13. Les images 1 et 2 de la figure montrent les déformations mesurées avec le critère de la plus courte distance entre chaque point d'un scan et la surface considérée de l'autre scan. Les images 3 et 4 montrent les déformations mesurées en considérant la correspondance des nœuds d'une grille
33
régulière. Cette étude a conclu sur la nécessité d’améliorer le géoréférencement des scans vu son influence sur l’analyse des déformations, et ce, en améliorant la distribution géométrique des points de contrôle ou en augmentant le nombre de cibles afin d’assurer la fiabilité du géoréférencement et l’exactitude de leur mesure.
Figure 2.13 : Cartes des déformations de la face en aval du Barrage, les points verts et jaunes représentent les grandes déformations du barrage (Alba et al., 2006)
Une approche intéressante qui répond à la problématique précédente a été présentée par Gonzalez-Aguilera et al. (2008). La nouveauté est dans l’utilisation de la RBF « Radial Basis Function » pour la paramétrisation de la surface et l’incorporation d’une méthode originale pour le géoréférencement et le contrôle de la précision des mesures WEOP «