CONSERVATOIRE NATIONAL DES ARTS ET MÉTIERS PARIS
MÉMOIRE
présenté en vue d’obtenir
le DIPLÔME D’INGÉNIEUR CNAM
SPÉCIALITÉ : Électronique
par
Frédéric MAURY
Réalisation d’une interface graphique de
reconstruction d’un signal TNT pour le radar passif
Soutenu le 24 Novembre 2014
JURY PRÉSIDENT :
M. Didier LE RUYET - Professeur des Universités - CNAM MEMBRES :
LCL Laurent BOVET - Division Stratégie Évolution - École de l’Air Mme Françoise BRIOLLE - Maître de Conférences - École de l’Air M. Pascal CHEVALIER - Professeur Titulaire de Chaire - CNAM
Remerciements
Je tiens tout particulièrement à remercier Madame Françoise BRIOLLE pour son aide, son investissement, sa disponibilité et son soutien tout au long de ce mémoire.
Je souhaite également remercier mes collègues de bureau : Monsieur Ghislain GASSIER pour son soutien, ses conseils et les bons moments passés ensemble et Amandine PERROT pour son aide et sa compagnie.
Merci à Monsieur Pascal RISCHETTE et Madame Agnès SANTORI pour leurs conseils et pour m’avoir accueilli au sein de l’équipe MAS’Air.
Merci également à Monsieur Pascal CHEVALIER pour les conseils qu’il m’a apportés.
Et enfin un grand merci à ma famille pour son soutien durant ce projet malgré mes absences.
Glossaire
ACCS Air Command and Control System. APF All Pass Filter.
CFO Carrier Frequency Offset.
CNRS Centre National de Recherche Scientifique. CREA Centre de Recherche de l’École de l’Air. CReA Centre de Recherche de l’Armée de l’air. DAB Digital Audio Broadcasting.
DGA Direction Générale de l’Armement. DSTA Defense Science Technology Agency. DVB-S Digital Video Broadcasting - Satellite. DVB-T Digital Video Broadcasting - Terrestrial. FBCF Feed Backward Comb Filter.
FFCF Feed Forward Comb Filter. FFT Fast Fourier Transform.
GNSS Global Navigation Satellite System. GSM Global System for Mobile communications. GUI Graphical User Interface.
GUIDE Graphical User Interface Development Environement. IFFT Inverse Fast Fourier Transform.
IM2NP Institut Matériaux Microélectronique Nanosciences de Provence. INTACT INTerface de trAitement aCousTique.
LMA Laboratoire de Mécanique et d’Acoustique. LTE Long Term Evolution.
Glossaire
MAS’Air Morpho Analyse du Signal Air. NSU National University of Singapore.
OFDM Orthogonal frequency-division multiplexing.
ONERA Office National d’Etudes et de Recherches Aérospatiales. POESIE PlatefOrme d’Etude du SIgnal de rEference.
QAM Quadrature Amplitude Modulation. RNT Radio Numérique Terrestre.
SFO Sampling Frequency Offset.
SINBAD Safety and security Improved by New functionality for Better Awareness on airport approach and departure Domain.
SONDRA Supélec ONERA NUS DSTA Research Alliance. TNT Télévision Numérique Terrestre.
Table des matières
Remerciements 1
Glossaire 2
Table des matières 4
Introduction 6 1 Généralités 7 1.1 Environnement . . . 7 1.1.1 Présentation du CReA . . . 7 1.1.2 Le projet . . . 9 2 Radar Passif 11 2.1 Principe général . . . 11 2.1.1 Avantages et inconvénients . . . 14 2.1.2 Etat de l’art . . . 15 2.2 Modélisation . . . 15 2.2.1 Problématique . . . 16
2.2.2 Les émetteurs d’opportunité . . . 17
2.2.3 Intérêt des émetteurs de diffusion numérique . . . 17
2.3 Conclusion . . . 20
3 Le signal TNT 21 3.1 La transmission numérique . . . 21
3.2 La transmission OFDM . . . 24
3.2.1 Notion d’orthogonalité . . . 25
3.2.2 Intervalle de garde ou préfixe cyclique . . . 26
3.3 La norme DVB-T . . . 27
TABLE DES MATIÈRES
4 Développement d’interfaces utilisateur 30
4.1 Langage de programmation . . . 30
4.2 Elaboration d’une interface graphique GUI . . . 31
4.2.1 L’interface graphique GUI . . . 31
4.2.2 Le programme GUIDE . . . 32
4.3 Le GUI POESIE . . . 37
4.3.1 Méthode de reconstruction du signal de référence . . . 37
4.3.2 Analyse fonctionnelle . . . 40
4.3.3 Réalisation du GUI . . . 41
4.3.4 Validation sur des signaux simulés . . . 46
4.3.5 Résultats sur des signaux réels . . . 48
4.4 Conclusion . . . 53
Conclusion générale et perspectives 54 Références bibliographiques 55 Annexes 56 A Elaboration du GUI INTACT 57 B Callback de l’interface graphique 63 B.1 Callback du bouton poussoir "Produce sequence" . . . 63
C Code Matlab pour l’amélioration de l’ergonomie du GUI 66 C.1 Ouverture d’un axe dans une autre figure . . . 66
C.2 Définition d’une image en arrière-plan . . . 67
Liste des figures 69
Introduction
La particularité d’un radar passif est de ne pas avoir de source d’émission ; il uti-lise des ondes électromagnétiques présentes dans l’environnement pour locauti-liser les cibles mobiles. Voué à un avenir très prometteur, il suscite un fort engouement dans le domaine de la recherche. En effet, ses nombreux avantages que je détaillerai dans ce rapport, font de lui un excellent moyen pour compléter les radars actuels civils et surtout militaires. Le Centre de Recherche de l’Armée de l’air (CReA) acquiert cette expertise en développant une plateforme (radar passif) et en menant des recherches avec des universitaires tels que l’Institut Matériaux Microélectronique Nanosciences de Provence (IM2NP) et Supélec ONERA NSU DSTA Research Alliance (SONDRA). Il pourra ainsi être aux côtés de l’Armée de l’air et de la Délégation Générale de l’Arme-ment (DGA) pour définir auprès de l’industriel une expression du besoin cohérente.
Le signal reçu par un radar passif est un mélange du trajet direct provenant d’un émetteur d’opportunité, des échos réfléchis par les réflecteurs fixes tels que les mon-tagnes, les bâtiments, le sol, etc. et des échos réfléchis par des cibles mobiles. A la différence du radar actif, l’émetteur ne fait pas partie du système et on ne dispose pas du signal émis. Il est donc nécessaire, à partir du signal reçu, d’estimer un signal de référence proportionnel au signal émis, auquel sera comparé les échos provenant des cibles mobiles, permettant ainsi de connaître la distance et la vitesse bistatique des cibles.
L’objectif du projet est de réaliser une interface graphique sous Matlab, permet-tant de visualiser et de contrôler les étapes de reconstitution du signal provenant d’un émetteur d’opportunité de type Télévision Numérique Terrestre (TNT). Comment réa-liser une telle interface permettant d’une part de configurer les paramètres utilisés pour cette reconstitution et d’autre part de visualiser les résultats obtenus à partir de signaux simulés et réels ?
Dans ce mémoire, après avoir défini l’environnement du stage, je présenterai le radar passif dans ses généralités. Dans un deuxième temps je détaillerai le signal de l’émetteur d’opportunité utilisé, ici le signal TNT. Puis je présenterai le développement de l’interface utilisateur réalisée durant ce projet.
Chapitre 1
Généralités
1.1
Environnement
1.1.1
Présentation du CReA
Depuis sa création, le CReA est implanté à Salon de Provence, au sein de l’École de l’Air, Grande École assurant la formation de l’ensemble des officiers de l’Armée de l’air.
1.1.1.1 Historique, missions et organisation
Créé en 2002, le Centre de recherche de l’École de l’Air (CREA) a pour mission de former par la recherche les élèves officiers de l’Armée de l’air dans différentes disciplines académiques. Les enseignants-chercheurs qu’il accueille, issus du monde universitaire et militaire, ont pour mission de poursuivre et de développer la recherche à l’École de l’Air. En 2006, le CREA se transforme en CReA. Il assure désormais une quadruple mission :
— Développer des activités de recherche afin de permettre les échanges de connais-sances avec les réseaux de la recherche scientifique et technologique et de jouer un rôle actif, participer à la diffusion d’une culture aéronautique et mettre en valeur les atouts de l’arme aérienne.
— Contribuer à la formation initiale et continue des officiers de l’Armée de l’air à travers la délivrance d’un corpus d’enseignements dans le domaine des sciences humaines et en sciences de l’ingénieur qui nourrissent les formations proposées par les Écoles d’Officiers de l’Armée de l’Air (EOAA).
— Mettre en oeuvre les compétences acquises dans les réseaux de recherche acadé-mique pour contribuer à la réflexion conceptuelle et prospective de l’Armée de l’air à travers la réalisation d’études appliquées et de contrats de recherche.
Chapitre 1 : Généralités
— Constituer un pôle de compétences et d’expertises capable d’accueillir et de for-mer les officiers engagés dans des parcours de formation de haut niveau (thèses de doctorat notamment).
Actuellement, le centre est composé de deux laboratoires et six équipes : — Laboratoire Sciences de l’ingénieur pour l’aéronautique :
— Morpho-analyse des signaux ;
L’équipe Morpho-Analyse du Signal (MAS’Air) est née en 2005 sous l’im-pulsion d’un maître de conférences et d’un officier. Elle compte actuellement trois enseignants-chercheurs et un doctorant. L’activité de recherche en trai-tement du signal de l’équipe MAS’Air repose sur deux piliers fondamentaux de la maîtrise de l’utilisation militaire du milieu aéronautique et spatial : la détection et la discrétion, tous deux considérés conjointement sous les angles théorique et expérimental.
L’axe détection traite plus particulièrement de la caractérisation de cibles, du radar passif terrestre et aéroporté ainsi que des antennes conformes. L’axe discrétion vise à développer des méthodes et des systèmes favorisant les aspects électromagnétique, visuel et acoustique.
— Dynamique du vol ; l’équipe « Dynamique du Vol » intervient dans la concep-tion et la mise en oeuvre du vecteur aérien : la mécanique du vol, la méca-nique des structures, l’aérodynamique, l’automatique et les mathématiques appliquées.
— Laboratoire Sciences humaines et sociales pour les milieux opérationnels : — Facteur humain et milieux opérationnel ; l’équipe « Facteur humain et
mi-lieux opérationnels (FHMO) » intervient dans les disciplines relevant des Sciences Cognitives et Comportementales.
— Histoire et sociologie militaires ; l’équipe «Histoire et Sociologie militaires» s’attache à analyser les expériences passées, à répondre et à anticiper les défis contemporains et à venir de l’Armée de l’air.
— Management des organisations de défense ; l’équipe de management des or-ganisations de Défense situe ses recherches dans le champ de la gestion du changement et de l’innovation.
— Prospective et études de sécurité. Les travaux conduits par l’équipe « Pros-pective et études de sécurité » portent essentiellement sur des thématiques relevant du droit international (paix et sécurité internationales), des rela-tions internationales et de la recherche à caractère prospectif.
Chapitre 1 : Généralités
1.1.2
Le projet
1.1.2.1 Contexte
Le contexte politique général impose une surveillance accrue de l’espace aérien, par-ticulièrement autour de zones sensibles (sites nucléaires, grandes agglomérations...). L’utilisation des radars classiques ne permet pas toujours de détecter à basse alti-tude et à vitesse lente les petits aéronefs (hélicoptère, drones...) et ces radars restent pour la plupart totalement aveugles face à la furtivité de certains aéronefs ou missiles. C’est dans ce contexte que des recherches sur l’utilisation du radar passif, utilisant des émetteurs d’opportunités (TNT, radio FM...) ont été initialisées au CReA au sein de l’équipe MAS’Air, notamment par une thèse du lieutenant-colonel Raout soutenue en décembre 2010 portant sur les traitements spatio-temporels adaptés aux radars bista-tiques à émetteurs non coopératifs [1]. Aujourd’hui, le CReA et l’équipe de l’IM2NP ont réalisé une interface graphique sur Matlab permettant de simuler d’une part les signaux reçus par un radar passif associé à un émetteur (TNT) en présence de cibles et d’autre part de détecter ces cibles au moyen d’une méthode d’extraction des échos effi-ciente [2, 3]. De plus, une méthode de reconstruction du signal de référence nécessaire pour les raisons exposées dans l’introduction a été réalisée dans le cadre d’un mémoire de master 2 (Amandine Perrot, Université du Sud-Toulon-Var) [4].
1.1.2.2 Objectif
Le projet se déroulera au sein de l’équipe MAS’Air sous la direction de Madame Françoise Briolle, enseignant chercheur Aix Marseille Université, détachée à l’École de l’Air. L’objectif qui s’inscrit dans la continuité du travail effectué par Amandine Perrot consiste à élaborer une interface graphique sous Matlab permettant de configurer des paramètres et visualiser les résultats des différentes étapes de la reconstruction du signal de référence correspondant au trajet direct en rouge sur la figure 2.1. En effet contrairement à un radar actif qui dispose de son propre émetteur et donc de son propre signal de référence, un radar passif reçoit le trajet direct noyé dans le signal reçu. Ce signal contient le trajet direct, les échos dû à l’environnement et la cible ainsi que du bruit. Il s’agit donc d’extraire ce trajet direct du signal reçu pour reconstituer le signal de référence.
Enfin je réalise ce projet depuis 18 mois en parallèle de ma formation à l’École Militaire de l’Air. Durant cette période mon projet de stage a évolué pour s’adapter au projet développé par les chercheurs de l’équipe, en pleine évolution, ce qui implique des incertitudes au niveau du cahier des charges et un travail d’adaptation au contexte évolutif.
Chapitre 1 : Généralités
1.1.2.3 Planning
Afin de respecter le temps imparti à l’aboutissement de ce projet, le planning suivant donnera les ordres de grandeurs des différentes étapes de sa réalisation.
Chapitre 2
Radar Passif
2.1
Principe général
La majorité des radars actuels fonctionnent activement en éclairant l’environne-ment de la cible afin d’en analyser l’écho et ainsi déterminer sa position et sa vitesse. L’émetteur et le récepteur sont alors situés au même endroit et partagent la même antenne.
Dans le cas du radar passif, il n’y a pas d’émetteur dédié : le récepteur utilise des émetteurs présents dans l’environnement (Fig. 2.1). Le radar passif est donc par nature un radar bistatique (l’émetteur et le récepteur ne sont pas situés au même endroit).
TNT Radar passif
Echo
Trajet direct
Figure 2.1 – Configuration bistatique du radar passif
Un radar nous permet de connaître la position de la cible et éventuellement sa vitesse. Dans le cas d’un radar monostatique, la portée mesurée définit un cercle centré sur le radar sur lequel la cible doit se situer (Fig. 2.2).
Chapitre 2 : Radar Passif
Cible
Tx Rx Dt
Dr
Figure 2.2 – Coupe de la sphère dans le plan monostatique
Dans le cas d’une configuration bistatique, la distance Dbist = Dt+ Dr appelée
distance bistatique, défini une forme elliptique en trois dimensions dont les foyers sont les lieux d’émission et de réception séparés d’une distance DL (Fig. 2.3).
Dt Dr Tx Rx Cible N N DL Trajet direct Va β/2 δ θr
Figure 2.3 – Coupe de l’ellipsoïde dans le plan bistatique1
Afin de déterminer cette distance bistatique, on doit disposer : de la différence des trajets τ entre l’écho réfléchi par la cible et le trajet direct ; du temps de propagation du trajet direct tDL; et de la célérité de la lumière dans le milieu de propagation c. La
relation s’écrit alors :
Dbist = c ∗ (τ + tDL) (2.1)
Cette distance bistatique ainsi que l’angle θr (voir figure 2.3) permet de calculer la
distance séparant la cible du récepteur grâce à la loi des cosinus [5] :
Dt2 = Dr2+ D2L−2DrDLcos( π
Chapitre 2 : Radar Passif D2r −2DrDLsin(θr) = Dt2− D 2 L 2D2 r −2DrDLsin(θr) + 2DtDr = Dbistat2 − D 2 L Dr= D2 bistat− D2L 2(Dbistat− DL.sin(θr)) (2.2)
La configuration bistatique donne de bonnes performances concernant la détection, mais sa capacité de localisation reste limitée car la cible se situe sur une ellipsoïde. Seule une configuration multi-statique, où plusieurs émetteurs ou récepteurs sont utilisés, permettra d’estimer la position de la cible.
Le radar passif nous permet également de déterminer la vitesse apparente Va de la
cible2 à partir du décalage en fréquence entre le signal émis et l’écho réfléchi par la
cible (Fig. 2.3). En effet, lorsque la distance bistatique entre l’émetteur et le récepteur en passant par la cible varie au cours du temps, il se produit un décalage en fréquence du signal émis par rapport à l’écho. Ce décalage est appelée la fréquence doppler fd et
est défini par [5] :
fd= f0 c[ d dt (Dt+ Dr)] = 1 λ[ dDt dt +dDr dt ] (2.3)
Avec f0 la fréquence porteuse du signal émis, c la célérité de la lumière dans le milieu
de propagation et λ la longueur d’onde du signal.
Lorsque l’émetteur et le récepteur sont fixes et la cible en mouvement, la vitesse radiale apparente dDt
dt , qui est la projection de Va sur Tx− Cible, est égale à : dDt
dt
= Vacos(δ − β/2) (2.4)
De la même manière, dDr
dt qui est la projection de Va sur Rx− Cible est égale à : dDr
dt
= Vacos(δ + β/2) (2.5)
La combinaison des équations 2.3, 2.4 et 2.5 donne :
fd= Va λ [cos(δ − β/2) + cos(δ + β/2)] fd= 2Va λ .cosδ.cos(β/2) (2.6)
Chapitre 2 : Radar Passif
La vitesse apparente Va est donc égale à :
Va=
λfd
2cosδcos(β/2) (2.7)
Afin de pouvoir résoudre les équations 2.1 et 2.7, il nous faut déterminer le retard
τ et la fréquence doppler fd entre le signal émis et l’écho au moyen de la fonction
d’inter-ambiguïté [6, 7, 8] définie par :
A(τ, fd) =
1
T
Z
[T ]
secho(t)s∗ref(t − τ)e
2iπfd(t)dt .
La première difficulté consiste à extraire le signal émis du mélange reçu sur le ré-cepteur radar : on reconstitue un signal qui lui est proportionnel, qu’on appelle signal de référence sref(t).
La seconde difficulté est d’extraire les seuls échos provenant de cibles mobiles afin d’ob-tenir le signal secho(t). L’émetteur d’opportunité est généralement omnidirectionnel ce
qui implique que les échos provenant des cibles mobiles sont généralement extrêmement faibles, masqués par le trajet direct et les multiples réflexions.
2.1.1
Avantages et inconvénients
Les principaux avantages du radar passif sont :
— le coût du radar, plus faible qu’un radar conventionnel, dû à l’absence d’émetteur, — la discrétion : ce radar est indétectable puisque qu’il n’y a aucune émission autres que les ondes radios et télévisées locales ; les cibles sont donc détectées sans le savoir,
— l’utilisation de bande de fréquences réservées aux télécommunications civiles per-met la détection d’avions furtifs. La conception de ces avions, qui minimise le retour de l’onde électromagnétique dans la bande de fréquences utilisée par les radars militaires, n’est pas optimisée pour les fréquences des émetteurs civils, — la possibilité de détecter des cibles volant à basse altitude : les émetteurs
d’oppor-tunité "éclairent" le sol et permettent ainsi de détecter des cibles volant à basse altitude.
Ses principaux inconvénients sont :
— une dépendance à la qualité et la fiabilité des émetteurs d’opportunité utilisés. Aucune maîtrise n’est possible sur eux,
— la complexité des traitements à réaliser qui nécessitent des calculs lourds et une mémoire informatique de grande capacité.
Chapitre 2 : Radar Passif
2.1.2
Etat de l’art
L’idée d’utiliser les émetteurs radio présents dans l’environnement pour détecter des cibles mobiles n’est pas récente. Elle a été validée en 1935 par des ingénieurs du Royaume-Uni qui ont pu détecter un bombardier à 12 km en utilisant les ondes radio d’un émetteur de la BBC. Pendant la seconde guerre mondiale, les allemands ont aussi utilisé un radar passif pour surveiller le sud de la mer du Nord.
Le développement des radars actifs mono-statiques, terrestres et aéroportés, a fait que cette technologie n’a pas été réellement développée.
Ce n’est que dans les années 1980, avec la baisse du coût de l’informatique et le déve-loppement des télécommunications numériques, que le radar passif a fait l’objet d’un regain d’intérêt.
Dès les années 1990, la DGA a financé des programmes d’études amont qui ont dé-bouché, dans les années 2010, aux démonstrateurs MORAPA et HA100 utilisant res-pectivement les émetteurs de télévision analogique et de radio FM. En Europe, des démonstrateurs ont été développés, notamment par l’Allemagne (Fraunhofer Institut), le Royaume-Unis, la République Tchèque, la Pologne, l’Italie et la Norvège.
En 1998, les Etats-Unis ont commercialisé un radar passif (Silent Sentry System) qui utilise les émissions des radios FM et de télévision analogique. Pendant la guerre du Kosovo, on pense que les forces serbes croates ont utilisé un radar passif de fabrication tchèque pour abattre un bombardier furtif américain le 27 mars 1999.
L’utilisation des techniques de communication numérique pour la diffusion de l’infor-mation (Digital Video Broadcasting - Terrestrial (DVB-T) pour la TNT, Digital Video Broadcasting - Satellite (DVB-S) pour le satellite, et Digital Audio Broadcasting (DAB) pour la radiodiffusion numérique, . . . ) permet de reconstruire le signal émis. Lorsque les émetteurs utilisent de large bande de fréquences (la TNT, par exemple), il est alors possible de détecter des cibles lentes, volant à basse altitude. On envisage d’utiliser les émetteurs TNT qui couvrent le territoire national de la plupart des pays européens pour surveiller des zones sensibles comme les centrales nucléaires, les grandes villes, etc.
La société Thales a développé, dans les années 2010, les démonstrateurs SINBAD et NECTAR 3D qui utilisent des émetteurs TNT. En 2013, le démonstrateur PREMIER 3D montre la faisabilité et l’intérêt d’utiliser simultanément des émetteurs FM et TNT.
2.2
Modélisation
La figure 2.4 illustre une configuration typique de détection d’une cible mobile (aéronef) par un radar passif utilisant une source d’opportunité. Le signal reçu par le détecteur radar est un mélange du trajet direct provenant de l’émetteur d’opportunité
Chapitre 2 : Radar Passif
TNT (bleu), des échos réfléchis par la cible mobile (rouge) et les réflecteurs fixes tels que les montagnes, les bâtiments, etc. (noir).
Figure 2.4 – Radar passif : contexte opérationnel
Sur le récepteur radar on considère le signal reçu en bande de base3, s(t), comme
une combinaison linéaire du signal émis par l’émetteur, se(t), suivis d’échos provenant
de réflecteurs fixes et mobiles, additionné de bruit de capteurs n(t).
s(t) = β0.se(t − t0) + X i βi.se(t − τi − t0) + X j γj.se(t − τj − t0)ei2πfdjt+ n(t) (2.8)
— t0est le retard lié à la propagation du trajet direct entre l’émetteur et le récepteur,
— τi+t0, (respectivement τj+t0) est le retard lié à la propagation du signal provenant
de l’émetteur, réfléchi par le ieme réflecteur fixe (respectivement la jeme cible
mobile), et le récepteur.
— βi et γj sont les amplitudes liées à la position et au coefficient de réflexion des
différents réflecteurs.
— fdj est le décalage en fréquence induit par la vitesse de la j
eme cible mobile.
2.2.1
Problématique
Dans le cadre du radar passif, le signal provenant de l’émetteur, se(t), n’est pas
connu. Il faut donc reconstituer les données numériques transmises à partir des si-gnaux émis au format DVB-T, et ainsi reconstituer, en bande de base, un signal de référence noté sref(t) qui correspondra au signal se(t − t0).
3. Le signal DVB-T, de largeur de bande ' 8M Hz, est porté par une fréquence fp ' 500M Hz .
Par une démodulation synchrone le signal est ramené en bande de base, c’est-à-dire entre [-4 MHz, 4 MHz]
Chapitre 2 : Radar Passif
Le signal reçu s’écrira alors en fonction de sref(t).
s(t) = β0.sref(t) + X i6=0 βi.sref(t − τi) + X j γj.sref(t − τj)e i2πfdjt+ n(t) (2.9)
2.2.2
Les émetteurs d’opportunité
Les émetteurs d’opportunité utilisés sont conçus pour : — la diffusion vidéo : TNT (signal DVB-T) ;
— la diffusion audio : radio AM, radio FM, Radio Numérique Terrestre (RNT) en cours de déploiement en France (signal DAB) ;
— les réseaux de téléphonie mobile : Global System for Mobile communications (GSM), Universal Mobile Telecommunications System (UMTS), Long Term Evo-lution (LTE) ;
— les réseaux métropolitains et locaux : Wifi, Wimax ;
— les émissions satellitaires utilisées pour les télécommunications et la géo-localisation : Global Navigation Satellite System (GNSS), DVB-S.
Figure 2.5 – Bande de fréquences des émetteurs d’opportunité
2.2.3
Intérêt des émetteurs de diffusion numérique
L’utilisation des émetteurs de diffusion de la TNT présente un certain nombre d’avan-tages :
— ils couvrent tout le territoire français,
— leur puissance est relativement élevée (100 kW pour l’émetteur de Bastia, par exemple),
Chapitre 2 : Radar Passif
— l’émission est large bande (' 8MHz) portée par des fréquences parfaitement connues,
— le flot de données émis peut être reconstitué.
— La largeur de bande du signal DVB-T (B ' 8MHz) et la possibilité d’avoir un long temps d’intégration permettent respectivement une bonne résolution en distance et en vitesse [5] :
◦ La résolution en distance est la distance minimale ∆Xβ séparant deux cibles
de même vitesse et de même amplitude pouvant être résolue (Fig. 2.6). Pour un radar bistatique comme pour un radar monostatique, cette résolution en distance est donnée par l’équation cτ
2 , où τ représente la largeur de
l’impul-sion émise. Pour générer cette séparation dans une configuration bistatique, deux cibles telles que les cibles 1 et 2 de la figure 2.6, doivent se trouver sur des courbes isodistance séparées d’au moins :
∆Xβ = cτ
2.cos(β
2)
.
La largeur de bande du signal DVB-T (B ' 8MHz) est supérieure à la largeur de bande utilisée par les radars actifs, impliquant donc une meilleur résolution en distance. Par exemple, pour un angle bistatique β de 120° et une durée d’impulsion τ de 1
B = 1 8.106Hz s, ∆Xβ a pour valeur : ∆Xβ = c.τ 2.cos(β 2) = 2.8.103.106 8 .cos(1202 ) '37m Dt Dr Tx Rx Cible 1 Trajet direct DL Cible 2 ∆Xβ Ellipses β/2
Chapitre 2 : Radar Passif
◦ La résolution Doppler ∆Vβ est la vitesse minimale séparant deux cibles de
même amplitude situées à la même distance pouvant être résolue (Fig. 2.7). Pour un radar bistatique comme pour un radar monostatique, la résolution Doppler est dépendante du temps d’intégration T c. Par conséquent fd1 − fd2= T1c.
En reprenant l’équation 2.6 pour chaque cible, on obtient l’expression de la résolution doppler pour un radar bistatique :
∆Vβ = V1cosδ1 − V2cosδ2 =
λ
2.Tc.cos(β2)
(2.10) Par exemple, pour un temps d’intégration cohérent Tc = 0, 1s (' 90
sym-boles DVB-T), un angle bistatique de 120° et une fréquence DVB-T de 600Mhz : ∆Vβ = λ 2.Tc.cos(β2) = 300.106 600.106 2.0, 1.cos(120 2 ) '5m/s = 18km/h Dt Dr Tx Rx Cible 1 et 2 Trajet direct DL β/2 V2 V1 δ2 δ1
Figure 2.7 – Résolution Doppler
De plus, comme les émetteurs TNT "éclairent" le sol, un radar passif associé à cet émetteur pourra détecter des cibles lentes volant à basse altitude car ces derniers renverront un écho de forte amplitude.
Chapitre 2 : Radar Passif
2.3
Conclusion
Le radar passif est totalement dépendant des signaux émis par les émetteurs d’op-portunité. Avant l’arrivée du numérique, les formes d’ondes analogiques utilisées ne permettaient pas d’obtenir du radar passif des performances à la hauteur du radar actif. C’est avec l’arrivé des transmissions numériques et notamment de la Télévision Numérique Terrestre que le radar passif devient vraiment intéressant puisque l’on est généralement capable de reconstituer le signal émis avec une grande précision. L’ob-jectif de mon travail est d’illustrer les différentes étapes de reconstitution de ce signal.
Chapitre 3
Le signal TNT
L’émetteur d’opportunité utilisé dans le cadre de notre radar passif est un émetteur TNT utilisant la norme DVB-T. Cette norme de diffusion, de part ses nombreux avan-tages (haut débit, meilleure qualité d’image, réception hertzienne mobile de qualité, jusqu’à 6 programmes par canal,. . . ) est utilisée en Europe, au proche et Moyen-Orient, dans la zone pacifique ainsi que dans certains pays d’Asie, d’Afrique et d’Amérique. Dans ce chapitre, nous donnerons une description de la transmission numérique et du multiplexage par répartition de fréquences orthogonales (Orthogonal Frequency Divi-sion Multiplexing (OFDM) en anglais) ainsi que de la norme DVB-T. Cette description nous permettra de comprendre la méthode de reconstitution du signal émis détaillée au paragraphe 4.3.1.
3.1
La transmission numérique
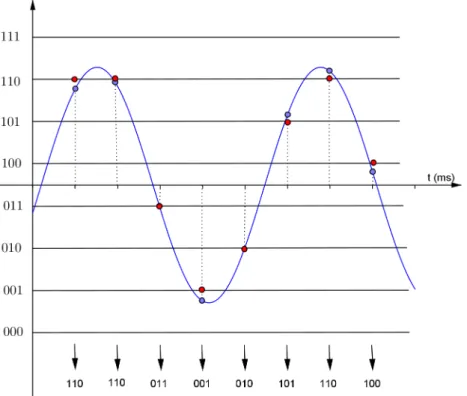
Un signal analogique est la manifestation des variations d’une grandeur physique (pression, température, courant, tension, . . . ) transportant l’information. Même si ce signal est borné, il peut prendre une infinité de valeurs. En numérique ce signal ana-logique est converti en une suite de 0 et de 1 que l’on appelle des bits au moyen d’un convertisseur analogique-numérique. Son principe est de prélever des valeurs du signal analogique à intervalles réguliers (échantillonnage). Chaque valeur est ensuite associée à un niveau prédéfini le plus proche (quantification) comme représenté figure 3.1. On procède alors au précodage qui consiste à affecter un nombre de bits à ces valeurs quantifiées. Le nombre de bits n nécessaire en fonction du nombre de niveau N est donnée par la relation :
n = log2N
Le signal est donc une succession d’échantillons de n bits. Dans l’exemple de la figure 3.1, le signal est donc la suite numérique 110110011001010101110100.
Chapitre 3 : Le signal TNT
Figure 3.1 – Etape de quantification : chaque échantillon est associé à un niveau prédéfini le plus proche
afin d’augmenter le débit d’information. Pour cela il existe une multitude de techniques de modulation dont la modulation d’amplitude en quadrature (Quadrature Amplitude Modulation (QAM) en anglais) qui est utilisée pour la transmission OFDM.
La modulation QAM
Cette modulation permet de regrouper les bits par paquets de 2, 4, 6 ou n bits correspondant respectivement aux modulations 4, 16, 64, et
QAM-N avec N = 2n. Prenons par exemple la suite binaire ci-dessous issue de l’étape de
précodage. On la découpe pour former des paquets de 4 bits appelés mots. Il existe donc L = 24 = 16 possibilités de mots différents.
Les 2 premiers bits (en noir) sont représentés par un nombre a qui peut prendre 4 valeurs différentes, selon la valeur des bits :
00 → +1 01 → +3 10 → −1 11 → −3
Chapitre 3 : Le signal TNT
Les 2 derniers bits (en vert) sont représentés par un nombre b et peuvent prendre les 4 mêmes valeurs différentes.
Le mot k est représenté par la donnée complexe dk = ak+ ibk. Cette donnée dk est
multipliée par un filtre de mise en forme h(t). Le mot n°k est représenté alors par le signal :
uk(t) = dk.h(t − k.Tu)
avec Tu la durée du symbole. La suite binaire est donc représentée maintenant par une
suite de données complexes (dL
1, dL2, . . . , dLm, . . . , dLM) et le signal : u(t) = u1(t) + u2(t) + . . . + um(t) + . . . + uM(t)
par une suite de symboles (u1, u2, . . . , um+ . . . + uM).
Le signal u(t) est porté par la fréquence ν0. En notation complexe, il s’écrit :
x(t) = u(t)e2iπν0t
La transformé de Fourier rapide (Fast Fourier Transform (FFT) en anglais) de ce signal nous permet d’observer son amplitude complexe sur un diagramme appelé constellation (partie réelle en fonction de la partie imaginaire) et représenté figure 3.2.
Figure 3.2 – Constellation pour QAM − 16
L’étape suivante consiste à envoyer ces symboles à travers un canal de transmission qui est le support utilisé pour véhiculer l’information. Dans ce canal, appelé canal de transmission, les trajets multiples dus aux réflexions sur les obstacles environnants (voir paragraphe 2.2) modifient fortement le signal transmis en atténuant certaines bandes de fréquences et en amplifiant d’autres. Ce canal de transmission peut être modélisé comme un filtre linéaire. Pour lutter contre ce phénomène, la norme DVB-T utilise une transmission multi-porteuses de type multiplexage par répartition en fréquence
Chapitre 3 : Le signal TNT
3.2
La transmission OFDM
L’OFDM est un type de modulation multi-porteuses qui est de plus en plus uti-lisé dans les radiocommunications. Citons par exemple le wifi et la norme 802.11, la télévision numérique terrestre développée avec le standard DVB-T ou bien encore la quatrième génération de téléphonie mobile utilisant le standard LTE. L’OFDM est un format différent des modulations traditionnellement utilisées : il utilise un grand nombre de porteuses pour transmettre les données.
Dans un système mono-porteuse, les symboles sont transmis de manière à ce que chaque donnée occupe l’intégralité de la bande disponible. Le principe de l’OFDM est de diviser la totalité de la bande passante allouée à la transmission en un nombre fini de sous-porteuses. Par conséquent, le train binaire sera reparti sur N sous-porteuses orthogonales entres elles afin d’annuler l’interférence entre sous-porteuses.
Le flux de données d’entrée est modulé par un modulateur QAM, qui produit une suite de données complexes d0, ..., dk, dn−1. Cette suite de données est ensuite envoyée
à travers un convertisseur série-parallèle qui donnera en sortie un ensemble de N don-nées QAM en parallèle transmise chacune par une sous-porteuse. Cet ensemble de N sous-porteuses constitue un symbole OFDM.
Définissons Tula durée utile d’un symbole OFDM avant l’ajout de l’intervalle de garde.
Chaque donnée dk module une sous-porteuse de fréquence fk = Tku donnant ainsi le
signal individuel dkei2πfkt.
Le signal s(t) représentant un symbole OFDM émis pendant le temps Tu peut
donc s’écrire comme la somme des N signaux individuels, N étant le nombre de sous-porteuses : s(t) = N −1 X k=0 dkei2πfkt= N −1 X k=0 dkei2π kt Tu (3.1)
L’implémentation physique nécessiterait autant d’oscillateurs que de sous-porteuses, ce qui n’est pas exploitable en pratique. Or, l’expression mathématique du signal nous montre qu’il peut être considéré comme une transformée de Fourier inverse (IDFT). En effet, lors de l’échantillonnage du signal s(t) à la période Te= TNu, nous obtenons le
signal s(nTe) noté s(n) suivant :
s(n) = N −1 X k=0 dkei2π nk N
Avec n ∈ 1, 2, ..., N et N le nombre de sous-porteuses.
Chapitre 3 : Le signal TNT
de la séquence de symboles S(m) =P
m dmδ(f − m) .
La séquence temporelle s(t) ainsi obtenue est alors portée par la porteuse ei2πF0t et le
signal transmis est de la forme u(t) = Re{(P
k
dkei2πfkt)ei2πF0t}.
En réception il suffira de faire la transformée de Fourier discrète du signal temporel reçu pour retrouver les symboles {dk} complexes.
La transformée de Fourier discrète est un outil intéressant du fait qu’il existe dans la pratique des algorithmes de calcul numérique rapide que sont la transformée de Fourier rapide (Fast Fourier Transform (FFT) en anglais) et la transformée de Fourier rapide inverse (Inverse Fast Fourier Transform (IFFT) en anglais) pouvant être implémentées dans les processeurs de signaux numériques (Digital Signal Processor (DSP) en anglais).
Lors d’une transmission OFDM, les sous-porteuses séparées de 1/Tu occupent toute
la bande utile allouée à la transmission. Pour garantir une efficacité spectrale optimale, il faut que les fréquences des sous-porteuses soient les plus proches possibles, tout en garantissant une absence d’interférence entre les informations qu’elles transportent afin que le récepteur soit capable de retrouver l’information. Pour cela il est nécessaire d’utiliser la relation d’orthogonalité entre toutes les sous-porteuses de la bande.
3.2.1
Notion d’orthogonalité
L’orthogonalité de deux fonctions f1(t) et f2(t) est définie par la relation :
< f1, f2 >=
Z Tu 0
f1(t) ∗ f2∗(t)dt = 0 si n 6= m
Cette condition est réalisée avec :
f1(t) = ei2π n
Tut, f2(t) = ei2π m
Tut avec m et n entiers
Cette orthogonalité permet d’avoir un recouvrement entre les spectres des diffé-rentes sous-porteuses, et malgré ceci d’éviter les interférences entres celles-ci si l’échan-tillonnage est fait précisément à la fréquence Te = TNu.
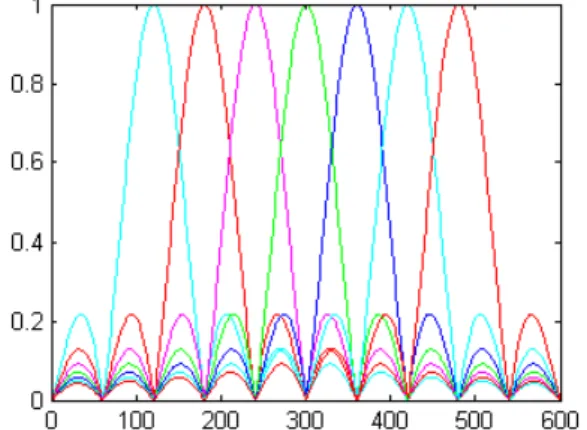
Dans le domaine temporel, le signal OFDM est composé de N sinusoïdes de pé-riodes respectives 1
fk transmises durant une durée Tu. La condition d’orthogonalité est
respectée lorsque la durée Tu est un multiple entier de la période f1k de chaque
sinu-soïde. fk doit donc être égale à Tku avec k entier comme présenté figure 3.3.
Chapitre 3 : Le signal TNT
temps Tu revient à appliquer une fonction porte de même durée dont la transformée
de Fourier est un sinus cardinal qui s’annule pour fk +/-Tnu avec n entier. Il n’y aura pas
d’interférence inter-porteuse (ICI) si fk−1 = fk−T1u et fk+1 = fk+T1u. L’orthogonalité
dans le domaine fréquentiel est présentée figure 3.4.
Figure 3.3 – Orthogonalité dans le
do-maine temporel Figure 3.4 – Orthogonalité dans le do-maine fréquentiel
3.2.2
Intervalle de garde ou préfixe cyclique
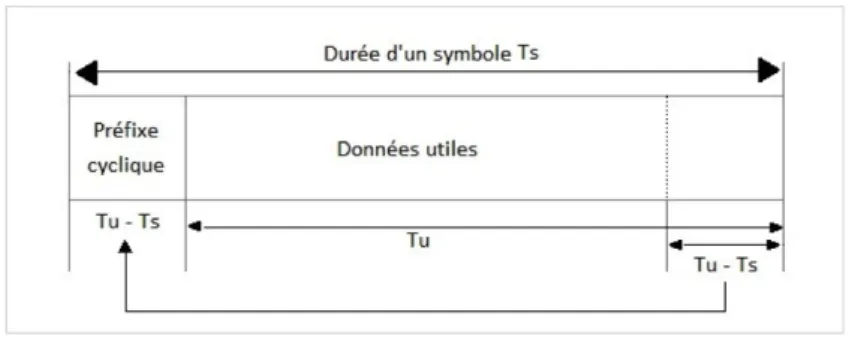
Un problème majeur dans les systèmes de communication sans fil est la présence de multi-trajets dus au canal de propagation. Dans cet environnement, le signal trans-mis est réfléchi par plusieurs obstacles et des versions retardées du signal étrans-mis se superposent au signal direct. Pour un système OFDM, cela entraîne de l’interférence inter-symbole (ISI) qui a lieu lorsque le symbole transmis est pollué par le symbole pré-cédemment transmis. L’effet est similaire à l’interférence inter-symbole pouvant exister dans un système de modulation mono-porteuse. La solution pour contourner ce pro-blème est l’insertion d’un intervalle de garde dont la durée est supérieure aux retards des échos par rapport au signal direct.
Cet intervalle pourrait être une succession de valeurs nulles transmises avant chaque symbole OFDM. Cependant, ce principe n’est pas utilisé en pratique car il entraînerait un deuxième type d’interférence qui est unique aux systèmes multi-porteuses, il s’agit de l’interférence inter-porteuse (ICI) qui agit entre les sous-porteuses au sein du sym-bole OFDM. L’insertion d’un intervalle de garde entrainerait une perte d’orthogonalité entre celles-ci et empêcherait un bon décodage du symbole. A la place de cet intervalle de garde, on ajoute un préfixe cyclique qui est une recopie de la fin du symbole OFDM. Il permet ainsi d’assurer l’orthogonalité entre les sous-porteuses en assurant un nombre entier de périodes pendant la durée du symbole OFDM (Fig. 3.5).
Chapitre 3 : Le signal TNT
Figure 3.5 – Préfixe cyclique du symbole OFDM
3.3
La norme DVB-T
Chaque symbole OFDM est constitué de N sous-porteuses (N = 8192 en mode 8K ou 2048 en 2K). Pour assurer l’orthogonalité, elles sont émises pendant le temps
T u= N.T (avec T la période élémentaire T = 7/64µs ).
Chaque sous-porteuse fka une amplitude complexe dmk représentant la donnée à
trans-mettre. Cette amplitude complexe ne peut prendre que L valeurs différentes correspon-dant à un alphabet fini (d1, d2, ..., dL) de taille L défini par la modulation QAM utilisée.
Dans le cas d’une modulation QAM-16, cet alphabet contient 16 valeurs différentes, représentant une séquence de 4 bits (cf. 3.2).
La table 3.1 représente la configuration retenue pour la nome DVB-T [11]. On ob-serve que toutes les sous-porteuses ne transmettent pas de données. En effet, le spectre du signal OFDM n’est pas limité sur les bords à cause de sa forme en sinus cardinal, si toutes les sous-porteuses étaient utilisées, cela créerait des interférences avec les ca-naux d’émission adjacents. Pour pallier ce problème, des sous-porteuses sont mises à zéro au début et à la fin du symbole utile afin de respecter la norme concernant la bande de fréquence allouée à l’OFDM. D’autre part, certaines sous-porteuses sont uti-lisées pour transporter 3 types de sous-porteuses pilotes : les pilotes fixes, disséminées et TPS (Transmission Parameter Signal en anglais). Ces pilotes permettent d’assurer la synchronisation en fréquence, en temps ainsi que l’estimation du canal.
La largeur fréquentielle du canal est de 7.61 MHz quel que soit le mode de transmis-sion 8K ou 2K utilisé. Pour un débit utile identique, le mode 8K permet de choisir un intervalle de garde plus grand que le mode 2K, et donc une meilleure robustesse aux échos.
Le signal DVB-T peut être émis par des émetteurs selon deux modes de diffusion : — le mode MFN (Multi Frequency Network) : utilisation de fréquences porteuses différentes pour deux émetteurs de diffusion voisins pour la diffusion
Chapitre 3 : Le signal TNT Mode de transmission 8K 2K Nombre de sous-porteuses 8192 2048 Nombre de sous-porteuses portant l’information 6817 1705 Nombre de sous-porteuses transportant des données utiles
6048 1512
Durée utile d’un
sym-bole : T u 896µs 224µs
Espace entre
sous-porteuses 1116Hz 4464Hz Largeur du canal 7.61MHz 7.61MHz Taille de l’intervalle de garde 1/4 1/8 1/16 1/32 1/4 1/8 1/16 1/32 Durée de l’intervalle de garde ∆ 224µs 112µs 56µs 28µs 56µs 28µs 14µs 7µs Durée totale : T s = T u+ ∆ 1120µs 1008µs 952µs 924µs 56µs 28µs 14µs 7µs
Nombre de pilotes
conti-nus 177 45
Nombre de pilotes
dis-persés 568 142
Nombre de pilotes TPS 24 6
Table 3.1 – Configuration retenue pour la norme DVB-T
de la même information. Par exemple, la chaîne TF1 sera diffusée sur le canal 21, donc à la fréquence porteuse 306 + 8 ∗ 21 = 474MHz, par l’émetteur de l’Etoile. Ce même flot numérique sera diffusé sur le canal 19, donc à la fréquence porteuse 306 + 8 ∗ 19 = 458MHz par l’émetteur voisin.
— le mode SFN (Single Frequency Network) : utilisation de la même fré-quence porteuse pour la diffusion des signaux. Quel que soit l’émetteur considéré, le flot numérique de TF1 sera diffusé sur le même canal donc à la même fréquence porteuse.
En France et au Royaume-uni, la diffusion de la DVB-T est assurée par un réseau MFN (Multiple Frequency Network). En Allemagne, en Chine, dans les pays nordiques, en Espagne, aux Pays-bas..., la diffusion est assurée par un réseau SFN (Single Fre-quency Network).
Chapitre 3 : Le signal TNT
3.4
Conclusion
La large diffusion de la TNT fait que les signaux DVB-T sont puissants et omni-présents dans notre environnement. L’utilisation de ces signaux par un radar passif est par conséquent intéressante. Cependant, contrairement au radar actif, le radar pas-sif n’émet pas de signal et ne connaît donc pas le signal de référence lui permettant de résoudre la fonction d’inter-ambiguïté (cf. paragraphe 2.1). Toute la problématique réside dans la capacité à retrouver ce signal de référence à partir du signal reçu. Aupa-ravant, l’équipe MAS’Air exploitait les signaux de référence au travers d’un algorithme propriétaire fourni par Thales. Aujourd’hui, elle a développé une méthode permettant de retrouver ce signal de référence de manière autonome. Cette méthode nécessite une interface graphique présentée au chapitre suivant.
Chapitre 4
Développement d’interfaces
utilisateur
4.1
Langage de programmation
Il existe plusieurs langages permettant de réaliser des interfaces graphiques inter-actives avec l’utilisateur. J’ai envisagé d’utiliser le langage python, Java et Matlab, chacun de ces langages ayant leurs avantages et leurs inconvénients. J’ai donc défini quel langage serait le plus approprié en fonction du :
— matériel mis à disposition : une station de travail Windows 7 avec Matlab R2012b, une connexion internet permanente (ce qui implique un accès aux langages de pro-grammation libres et aux forums des développeurs), un accès à la documentation (interne au laboratoire et bibliothèque de la base aérienne).
— temps dont je dispose pour réaliser l’interface, apprentissage du langage compris : un total de 13 semaines sur 18 mois en parallèle de ma formation académique et militaire à l’École Militaire de l’Air.
— langage avec lequel la méthode de reconstruction du signal de référence a été codé : Matlab.
Au vu de ces contraintes je me suis orienté sur Matlab dont j’avais un accès aisé et de la documentation. Le programme Matlab permet de développer des interfaces utilisateur (GUI) d’une part à la main et d’autre part à l’aide de l’environnement de développement des interfaces utilisateurs graphiques (Graphical User Interface Deve-lopment Environement (GUIDE) en anglais). Le tableau 4.1 montre les avantages et inconvénients pour les deux modes de programmation.
Chapitre 4 : Développement d’interfaces utilisateur
A la main Avec GUIDE
Avantages
- Contrôle total sur le code. - Environnement graphique convivial et intuitif, pour le design comme pour les nom-breuses propriétés des ob-jets.
- Evolution aisée en fonction des versions Matlab utili-sées.
- Une seule structure «handles» (§4.2.2.1) pour accéder à tous les objets graphiques.
- Actions des objets faciles à programmer grâce aux fonc-tions callback (§4.2.2.4). - Debugging et modification facile.
Inconvénients - Changement de design àéviter absolument. -de l’IHM difficile à com-Code d’initialisation prendre.
- Partie actions des objets graphiques plus délicates à programmer.
- Attention au passage aux nouvelles versions Matlab. - Accessibilité aux multiples
propriétés des objets fasti-dieuses.
- Code partie purement graphique crypté (.fig) (§4.2.2.1).
Table 4.1 – Avantages et inconvénients des deux modes de programmation. Au regard de ce tableau et des contraintes exposées ci-dessus, j’ai choisi de pro-grammer avec le GUIDE. Cet outil m’a permis de développer différentes interfaces utilisateur :
— le GUI INTACT, qui est une interface de traitement acoustique, est présenté dans le détail en annexe A. J’ai développé cette interface afin de me familiariser avec le programme GUIDE qui m’était inconnu.
— le GUI POESIE, qui est une plateforme d’étude du signal de référence. Cette interface permet à l’utilisateur, en réglant des paramètres, d’extraire le signal DVB-T émis à partir du signal reçu par une antenne.
4.2
Elaboration d’une interface graphique GUI
4.2.1
L’interface graphique GUI
Le GUI est un affichage graphique dans une ou plusieurs fenêtres permettant à l’utilisateur de réaliser des tâches interactives. Un exemple d’interface interactive est présenté figure 4.1 qui est une copie d’écran. L’utilisateur utilise des boutons qui sont
Chapitre 4 : Développement d’interfaces utilisateur
situés à gauche de l’écran pour activer certains traitements ou ajuster les paramètres via l’interface. Dans l’exemple présenté, les signaux traités et non traités sont affichés dans quatre fenêtres dédiées respectivement aux représentations temporelle, fréquentielle et temps-fréquence. L’utilisateur a aussi la possibilité d’écouter les signaux traités. Cette interface que j’ai appelée GUI INTACT est présentée en annexe A.
Figure 4.1 – Interface du GUI INTACT
4.2.2
Le programme GUIDE
Le programme permettant de réaliser une interface graphique (un GUI) est le GUIDE. Il regroupe tous les outils dont le programmeur a besoin pour créer cette interface graphique de façon intuitive.
Il s’ouvre, soit en cliquant sur l’icône de la barre d’outils Matlab, soit en tapant la commande "guide" dans la fenêtre de commande Matlab. L’interface qui s’ouvre alors est présentée figure 4.2. Elle est divisée en 3 parties :
— une barre d’outils,
— une palette de composants1,
— un plan de disposition (défini en 4.2.2.2).
1. Le terme composant, traduit de l’anglais component, désigne l’ensemble des éléments sur la gauche de la figure 4.2
Chapitre 4 : Développement d’interfaces utilisateur
Figure 4.2 – Interface GUIDE 4.2.2.1 La barre d’outils
La barre d’outils permet entre autre :
— d’aligner les composants dans le plan de disposition,
— d’ouvrir un explorateur contenant les composants présents dans le plan de dis-position,
— d’ouvrir un inspecteur de propriété qui permet de modifier les paramètres d’un composant,
— de sauver le GUI réalisé.
Lors du premier enregistrement, le GUIDE crée :
— un fichier .fig qui contient la définition des objets (position, propriétés),
— un fichier .m qui contient les lignes de code qui assurent le fonctionnement de l’interface graphique,
— une structure handles où sont stockés les identifiants des composants et du plan de disposition du GUI. Cette structure est aussi utilisée par le programmeur pour stocker, récupérer ou modifier des variables nécessaires à la réalisation du programme. Cette structure est envoyée comme argument d’entrée dans chaque
Chapitre 4 : Développement d’interfaces utilisateur
4.2.2.2 Le plan de disposition
C’est le plan sur lequel seront disposés les différents composants. Il constitue l’inter-face graphique GUI qui sera présentée à l’utilisateur. Le plan de disposition en lui-même possède un inspecteur de propriétés au même titre que les composants (l’inspecteur de
propriétés est expliqué plus en détail au paragraphe 4.2.2.4).
Pour le GUI POESIE, le plan de disposition de l’interface est présenté figure 4.3. Il comprend à gauche un certain nombre de boutons et à droite quatre axes où seront affichés les résultats.
Figure 4.3 – Plan de disposition du GUI POESIE
4.2.2.3 Palette des composants
L’interface du GUIDE permet de manipuler facilement les composants dans le plan. J’ai donc utilisé pour le GUI POESIE les composants suivants :
— Push Button : bouton poussoir permettant à l’utilisateur de déclencher une ac-tion,
— Static Text : texte ne pouvant être modifié par l’utilisateur, — Edit Text : texte ou nombre pouvant être modifié par l’utilisateur,
— Pop-up Menu : liste déroulante permettant à l’utilisateur de choisir une option dans la liste,
— Axes : permet l’affichage graphique des résultats, — Panel : permet de grouper plusieurs composants.
Chapitre 4 : Développement d’interfaces utilisateur
4.2.2.4 L’inspecteur de propriétés et le callback
Chacun de ces composants ainsi que le plan de disposition possèdent un
inspec-teur de propriétés obtenu par clic droit "Property Inspector" ou par double clic sur le
composant ou plan de disposition. C’est au travers de cet inspecteur que sont définies les propriétés, les données et les actions relatifs au composant sélectionné. Un exemple d’inspecteur de propriétés du Push Button est présenté figure 4.4.
Figure 4.4 – inspecteur de propriété du Push Button Mapping
Parmi ces propriétés, les plus importantes concernant l’interaction avec l’utilisateur sont les callbacks. Quand un évènement est généré par l’utilisateur (click sur la souris, activation d’une touche...), le logiciel Matlab fait appel au callback lié à cet évenement et exécute le code défini par le programmeur qui y est associé. Il existe vingt types de callback qui sont disponibles en fonction du type de composant choisi. Pour le Push Button de l’exemple figure 4.4, il en contient cinq types qui sont :
— ButtonDownFcn : s’exécute lors de l’appui sur un bouton de la souris alors que le pointeur de la souris est sur un composant ou une figure ;
— Callback : s’exécute, par exemple, lorsque l’utilisateur clique sur un Push Button, sélectionne un Radio Button, choisit une option d’un Pop-up Menu... ;
Chapitre 4 : Développement d’interfaces utilisateur
— CreateFunction : s’exécute entre la création du composant et son affichage ; — DeleteFunction : s’exécute juste avant la destruction du composant ;
— KeyPressFunction : s’exécute lorsque l’utilisateur appuie sur une touche du cla-vier tout en ayant le focus sur ce composant.
Chaque callback est défini comme une fonction prenant trois arguments en entrée : — hObject : nombre correspondant à l’identifiant du composant dont le callback
dépend,
— eventdata : structure contenant les données des événements générés par le compo-sant ou le plan de disposition (pour les Push Button et autres compocompo-sants qui ne génèrent aucune donnée d’événement, cet argument contient une matrice vide). Par exemple, le callback KeyPressFcn associé au plan de disposition permet de connaître la touche du clavier activée par l’utilisateur, sa valeur (a, b, c,...x, y,
z, return...) est alors mémorisée dans la structure eventdata. Il est ainsi possible
d’utiliser ces données pour effectuer des actions.
— handles : structure des identifiants et des variables du programme, elle peut être modifiée et mis à jour si nécessaire (voir paragraphe 4.2.2.1).
Un exemple de callback du Push Button "Produce sequence" est présenté en annexe B.
Les autres propriétés concernent la mise en forme et la gestion du composant. Les principales pour le Push Button de l’exemple figure 4.4 sont :
— BackgroundColor : permet de définir une couleur d’arrière plan ; — CData : permet d’insérer une image sur le composant ;
— FontAngle, FontName, FontSize, FontUnits, FontWeight et ForgroundColor : per-mettent la mise en forme du texte ;
— Position : définit la position du composant sur le plan de disposition ; — String : permet d’insérer du texte ;
— Style : définit le type de composant (Push Button, Edit Text...) ;
— Tag : label qui est utilisé dans le nom donné aux callbacks lorsqu’ils sont générés dans le fichier .m ;
— UserData : données stockées par l’utilisateur qui n’est pas utilisé par Matlab mais qui peuvent être récupérées ou modifiées à l’aide de commandes spécifiques ; — Visible : permet de définir si le composant sera visible ou pas.
Chapitre 4 : Développement d’interfaces utilisateur
4.3
Le GUI POESIE
Le GUI POESIE permet de reconstruire le signal de référence à partir d’un si-gnal reçu sur un capteur contenant un mélange du sisi-gnal de référence additionné de nombreux échos provenant de réflecteurs fixes ou mobiles (affecté de l’effet Doppler).
4.3.1
Méthode de reconstruction du signal de référence
Ce travail a été réalisé par Amandine Perrot [4] dans le cadre de son stage de master 2 effectué dans l’équipe MAS’Air du CReA, sous la direction de F. Briolle. J’ai réalisé l’interface utilisateur graphique (Graphical User Interface (GUI) en anglais) POESIE (PlatefOrme d’Etude du SIgnal de référencE), qui permet à un utilisateur de recons-truire un signal de référence, en contrôlant toutes les étapes. Je n’exposerai ici que les principales étapes du traitement.
A partir du signal s(t) reçu sur le récepteur, on cherche à reconstruire un signal proportionnel au signal émis se(t − t0). Les émetteurs de Télévision Numériques
Ter-restre diffusent des signaux construits avec la norme DVB-T (voir paragraphe 3.3). Ces signaux sont une succession de symboles de durée Ts. Chaque symbole est constitué
d’une partie utile de durée Tu, précédée d’un intervalle de garde de durée Tg = Tu/n.
L’intervalle de garde permet de s’affranchir des nombreuses réflexions, c’est une fraction (1
n, n = 4, 8, 16ou32) de la partie utile, placée en début de symbole.
En mode 8K, la partie utile du symbole est constituée de 8192 sous-porteuses or-thogonales dont 6817 portent l’information (data) codées en QAM (4, 16 ou 64), les autres sous-porteuses sont mises à zéro. Parmi les sous porteuses portant l’information, 769 d’entre elles (193 en 2K), appelées fréquences pilotes, portent des valeurs fixées par la norme DVB-T. Leur position (νk), fixée par la norme DVB-T, se répète tous
les 4 symboles. Au paragraphe 3.3, on trouvera une description détaillée de cette norme.
La reconstruction d’un signal proportionnel au signal émis se(t − t0) s’effectue
sym-bole par symsym-bole. La première étape est donc la synchronisation temporelle.
1. Synchronisation temporelle
Pour connaître le début de chaque symbole, on génère un signal temporel sp(t)
ne contenant que les fréquences pilotes. Le maximum de la fonction de corréla-tion entre ce signal et le signal reçu s(t) nous permet de connaître le début du symbole.
On considère que le signal reçu est une succession de symboles filtrés par le canal de transmission.
Chapitre 4 : Développement d’interfaces utilisateur
2. Reconstruction temporelle du signal émis
Pour chaque symbole, dont on connaît la durée Ts = Tg+Tu, on enlève l’intervalle
de garde, pour ne garder que la partie utile du symbole. (a) Estimation du canal de transmission
La transformée de Fourier de la partie utile du symbole s’écrit :
S[νm] =
8192
X
m=1
drmδ(ν − νm)
Pour chaque fréquence pilote νk, le filtre linéaire représentant le canal de
propagation est connu, sa fonction de transfert vaut :
H[νk] = dek dr k δ(ν − νk) avec de
k valeur émise et drk valeur reçue du pilote. La fonction de transfert
du filtre canal sera interpolée pour toutes les fréquences νm.
(b) Egalisation
Une première estimation du symbole émis est obtenue en multipliant le symbole par ce filtre, ce qui permet de corriger les effets du canal de trans-mission : ^ Se[ν m] = S[νm].H ∗ [νm] = 8192 X m=1 ˜ de mδ(ν − νm) (c) Corrections CFO
Pour transmettre un signal à bande étroite sur un canal radio, il est né-cessaire de transposer ce signal vers une haute fréquence appelée fréquence porteuse et notée fp. Cette action est réalisée au moyen d’un oscillateur
à l’émission et d’un autre oscillateur en réception tous deux réglés à la même fréquence (fp ' 514Mhz pour un signal DVB-T, sa valeur précise
dépend du canal, car en TNT, plusieurs canaux transportant des données différentes sont envoyés simultanément). En pratique il existe toujours un décalage entre les deux oscillateurs. Ce décalage, appelé erreur de synchro-nisation fréquentielle (Carier Frequency Offset (CFO) en anglais), entraîne une dégradation du signal en réception.
Le signal reçu en bande de base en présence de CFO s’écrit :
Chapitre 4 : Développement d’interfaces utilisateur
Cet écart en fréquence ∆f introduit donc un déphasage sur le signal en bande de base qui augmente au cours du temps. Ce déphasage varie li-néairement sur plusieurs symboles OFDM. On calcule donc par régression linéaire la pente de la droite définie par l’ensemble des phases moyennes. Cette pente a pour valeur 2π∆f.
Il suffit donc de multiplier le signal reçu r(t) par e−i2π∆f t pour corriger l’effet
de la CFO. (d) Mapping
Les data émises ne peuvent pas prendre n’importe quelle valeur. Elles ap-partiennent à un alphabet fini (de 64 valeurs pour une modulation QAM-64, par exemple).
Il suffit donc de réaffecter les valeurs estimées ˜de
m à la valeur la plus proche
de l’alphabet pour reconstituer le flot de données contenu dans ce symbole. On obtient donc le signal :
Se[νm] =
8192
X
m=1
demδ(ν − νm)
(e) Reconstruction temporelle du symbole
Une transformée de Fourier inverse (Inverse Fast Fourier Transform (IFFT) en anglais) permet d’obtenir la partie utile du symbole en fonction du temps. Il suffit de la faire précéder par l’intervalle de garde, qui est une partie de la partie utile, pour reconstituer le symbole émis en fonction du temps.
Dans le cadre du stage d’Amandine Perrot, le traitement permettant de cor-riger le décalage de la fréquence d’échantillonnage (Sampling Frequency Offset (SFO) en anglais), c’est-à-dire l’écart entre la fréquence d’échantillonnage utilisée à l’émission et à la réception, n’a pas été développé.
Chapitre 4 : Développement d’interfaces utilisateur
4.3.2
Analyse fonctionnelle
L’analyse fonctionnelle de cette interface graphique a été réalisée dans le but de définir les besoins de l’équipe MAS’Air concernant le GUI POESIE. J’ai donc inter-rogé chaque personne de l’équipe afin de définir les attentes concernant cette interface graphique. L’ensemble des besoins sont recensés dans le graphe fonctionnel présenté sur la figure 4.5. Ce graphe fonctionnel identifie et classe les fonctions de service comme fonctions principales de l’interface ou fonctions contraintes. Il permet alors de carac-tériser les fonctions de service dans un tableau en définissant pour chaque fonction le composant ou l’action le plus approprié afin de répondre aux besoins (Tab. 4.2). La démarche et les résultats de cette analyse fonctionnelle constituent le cahier des charges du GUI POESIE.
Chapitre 4 : Développement d’interfaces utilisateur
Fonctions Critères Niveaux d’exigences
FP1 : Le produit permet à l’utilisateur de configurer les paramètres sur signaux simulés ou réels
Types de paramètre Liste ou edit texte Type de signaux Signaux simulés et réels
Organisation Paramètres regroupés dans des panneaux
FP2 : Le produit permet à l’utilisateur de visualiser les résultats sur signaux
simulés ou réels
Forme Axe
Nombre 4
Disposition Sur le plan de disposition à droite des paramètres
Affichage Possibilité d’ouvrir un axe dans une autre figure. FP3 : Le produit permet à
l’utilisateur de sauver chaque étape du traitement sur signaux simulés ou réels
Forme Boîte de dialogue
Emplacement sauvegarde Laisser le choix à l’utilisa-teur
Type de fichier Fichier *.mat FC1 : Le produit doit
respec-ter la norme DVB-T Standard Standard DVB-T ETSI EN300 744 V1.6.1 FC2 : Le produit doit être
multiplateforme Système d’exploitation Windows et Mac FC3 : Le produit doit gérer
les erreurs de configuration des paramètres
Type d’erreurs Mauvais paramètres
Avertissement Pop-up avec un message d’erreur
FC4 : Le produit doit avoir
une version standalone Outil Matlab compiler runtime(MCR) Versions Une version Mac et une
ver-sion Windows FC5 : Le produit doit
fonc-tionner avec des signaux réels
Type Fichiers *.bin
FC6 : Le produit doit fonc-tionner avec des signaux si-mulés
Type Fichiers *.mat
Table 4.2 – Caractérisation des fonctions de service.
4.3.3
Réalisation du GUI
La figure 4.6 est extraite du GUI POESIE (partie bleue de la figure 4.3). Cette figure se décompose en plusieurs zones définies au moyen du composant Panel, ces zones comprennent :
— la définition du type de signal (settings of DVB-T signal) que l’on souhaite étudier (en haut à gauche),
— les conditions expérimentales (experimentals conditions) qui permettent de ca-ractériser les échos fixes et mobiles ainsi que le bruit (au milieu à gauche), — les paramètres de réception (settings of reception) où l’on fixe la CFO et la
désyn-Chapitre 4 : Développement d’interfaces utilisateur
Figure 4.6 – Description des composants utilisés pour le GUI POESIE est prévue par le paramètre "Doppler effect" (en bas à gauche),
— des fenêtres d’information où s’affiche la progression du processus ainsi que des messages utiles pour l’utilisateur (en haut à droite),
— les différentes phases du traitement (processing of reference signal) qui com-prennent la production d’une séquence de pilotes, la synchronisation, l’égalisation, la correction CFO et mapping ainsi que les résultats (au milieu à droite),