Nonlinear control with integral sliding properties for circular aerial robot trajectory tracking: Real‐time validation
Texte intégral
Figure
Documents relatifs
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
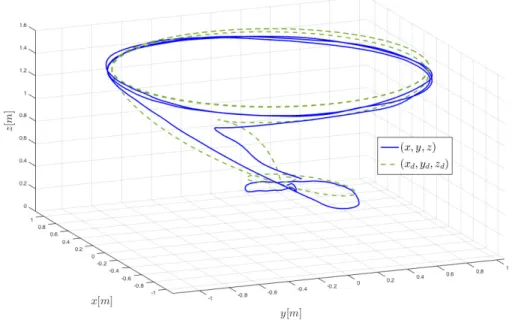
A robust sliding mode control algorithm using an integral sliding variable has been introduced in this paper and applied to solve the practical stabilization and tracking problems for
In this work control laws are developed for trajectory tracking of a hybrid terrestrial aerial vehicle.. These kinds of vehicles have the advantage to be used as a flying vehicle or
The aim of the lateral control of autonomous intelligent vehicles is to minimize the lateral displacement of the vehicle with respect to a given reference path... SMC AND
An approximation of the sign function has been given based on delayed values of the processed variable, which ensures chattering reduction for the sliding mode control and
It deals with the problem of closed-loop (feedback) control, using Sliding Mode methodology in order to design a robust feedback which tracks a given setpoint.. 2.2 Experimental
Since the control appears in the first derivative, the system has a relative degree equal to 1 w.r.t. the sliding variable. A first order sliding mode algorithm would have
Firstly, as a starting point, this work focuses on classical robust nonlinear model predictive control law under model parameters uncertainties implying solving a basic
