On va étudier deux mouvements dans le but de déterminer les coordonnées du vecteur position en fonction du temps et en déduire les coordonnées des vecteurs vitesse et accélération .
4
0
0
Texte intégral
(3)
Figure
Documents relatifs
Réaliser et/ou exploiter une vidéo ou une chronophotographie pour déterminer les coordonnées du vecteur position en fonction du temps et en déduire les coordonnées approchées ou
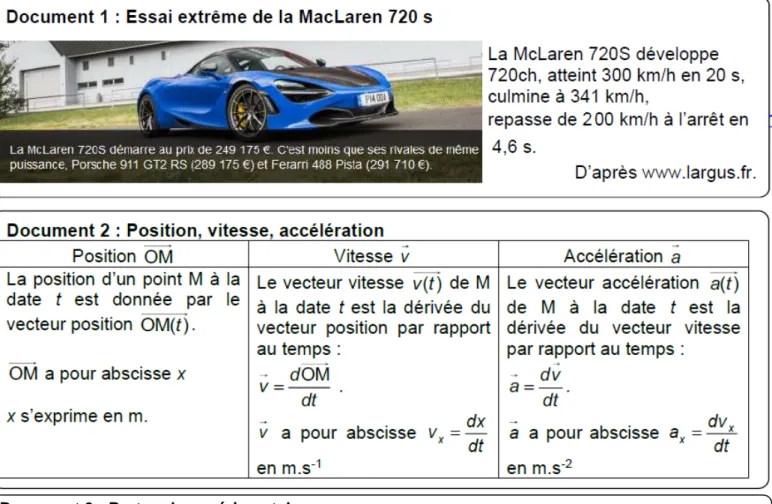
On va étudier deux mouvements dans le but de déterminer les coordonnées du vecteur position OM en fonction du temps et en déduire les coordonnées des vecteurs vitesse v
- Représenter des vecteurs vitesse d’un système modélisé par un point lors d’un mouvement à l’aide d’un langage de programmation.. L’échelle de la chronophotographie est 1
[r]
AB est un objet mathématique qui modélise la transfor- mation qui amène le point A sur le point B. On représente ce vecteur par une flèche qui n’est
- l'accélération normale existe dès lors qu'un solide est en mouvement de rotation, de translation circulaire, ou en mouvement plan. - l'accélération normale est aussi
- l'accélération normale existe dès lors qu'un solide est en mouvement de
Il représente un déplacement de 5 unités de longueur vers la droite, parallèlement à l’axe des abscisses.. Il représente un déplacement de 2 unités de longueur vers le haut,
