Transrectal Ultrasound Image-based Real-time Augmented Reality Guidance in Robot-assisted Laparoscopic Rectal Surgery: A Proof of Concept Study
Texte intégral
Figure



Documents relatifs
In the first part, our work is devoted to the construction of the recursive estimator of conditional hazard function for a real response variable conditioned to a functional
These are the entries of a finite elements model, which returns the interaction force between the tool tip and the membrane at the contact point (from which the robot command
Compared to current techniques, which are limited to a rigid registration of the pre-operative liver anatomy with the intra-operative image, we propose a real-time,
15th IFIP International Conference on Prod- uct Lifecycle Management (PLM), Jul 2018, Turin, Italy.. The construction industry is a project-based industry characterized by
The algorithm and tools of augmented reality were introduced into the adaptive control system of the pulp gas phase in the iron ore flotation process using a control action
CS: Computer Screen; VST: Video See-Through; HMD: Head Mounted Display; OST: Optical See-Through; HA: Home Automation; PoC: Proof of Concept; M: Medicine; BAV: Brain Activity
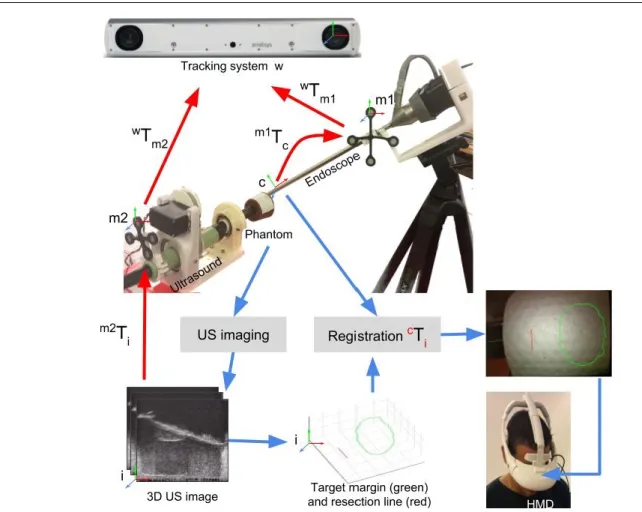
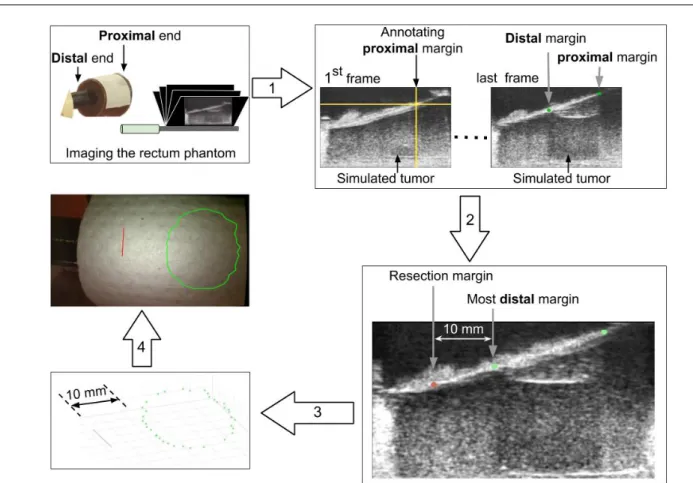
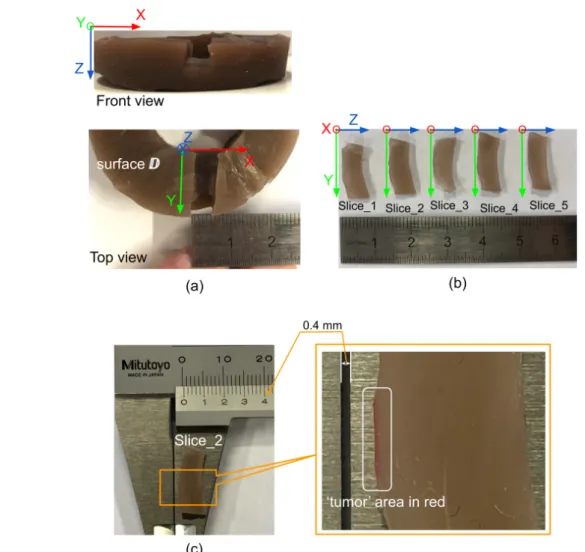
The proposed framework was evaluated by localizing a hidden target set inside a soft tissue phantom (Fig.4 (a)).. An US imaging was performed on the hollowed silicon phantom and
The algorithm has been tested on various images sequences and for various applications (visual servoing, augmented reality,...) which demonstrates a real usability of this
