Autonomous Personal Mobility Scooter for Multi-Class Mobility-On-Demand Service
Texte intégral
Figure
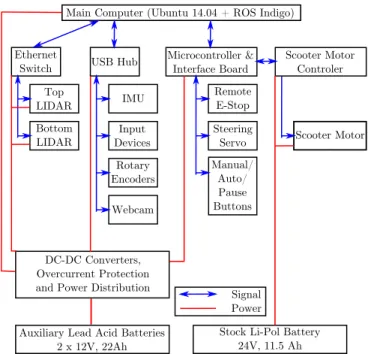
![Fig. 5. System Architecture, [Source [2]]](https://thumb-eu.123doks.com/thumbv2/123doknet/14137087.469824/6.918.84.838.73.337/fig-system-architecture-source.webp)
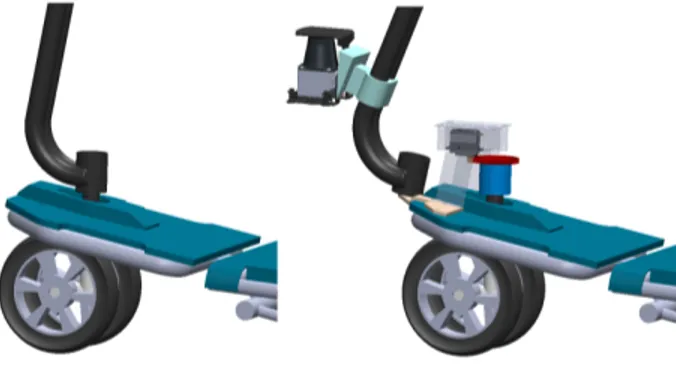
![Fig. 7. An illustration of the dynamic virtual bumper [Source [8]]](https://thumb-eu.123doks.com/thumbv2/123doknet/14137087.469824/7.918.95.450.83.241/fig-illustration-dynamic-virtual-bumper-source.webp)
Documents relatifs
Social Sensing for Trajectories of Moving Objects Asking the Right Questions to the
E : batterie de 18V.. Question 1 : écrire en assembleur le sous programme INITADC réalisant l’initialisation du module ADC en mode start/stop et cascadé, pour permettre la
En cas de défaut de la poignée d’accélérateur, le voyant défaut sera allumé (IOPB5=1). Elle est active au niveau haut. La PWM est en mode asymétrique. La vitesse du moteur
Si vous vous débarrassez d’une vieille patinette et quand votre patinette sera hors d’usage, contactez votre centre de recy- clage de déchets afin d’obtenir les
À Bastia le compteur de son scooter marque 000739.. Arrivé à Centuri, il lit le panneau CORTI
A l’aide de la notice technique de la batterie, déterminer la capacité C de la batterie lorsque celle- ci fournit au scooter le courant pour se déplacer à 45
Double cliquer sur le bloc résistance au roulement, puis saisir la valeur du couple résistant (couple nominal calculé à la question 2.3)... ÉTUDE DU SYSTÈME EN
While these forms of migration cannot be directly assimilated to the free movement of West Europeans prior to 2004 – despite theoretical arguments about the integration of the
