Feature Preserving Mesh Generation from 3D Point Clouds
Texte intégral
Figure



Documents relatifs
The fact that quadratic potentials play a special role has been known for many years: as established in [21], the fundamental solution associated to the linear solution is smooth
In order to obtain a dense depth map, the expression of the ratio between the gradient magnitude of the sharp image and the gradient magnitude of the blur image has to be defined
Dealing with the customized footwear, we choose a novel algorithm, which combines the NARF key point detector and the FPFH descriptor, to improve the efficiency of the
A l'inverse de la biodégradation aérobie, la digestion anaérobie des composés organiques s'effectue en l'absence d'oxygène et forme du dioxyde de carbone, du méthane et de l'eau.
tion of the foot point of the spacecraft (Figure 8) well inside the FOV of the neighboring station, FSMI, and slightly magnetically south of FSIM, one may rightly conclude that
To support the defined use cases, two basic further layers to the semantic one are added to ontology in order to ensure the geometry detection and annotation process
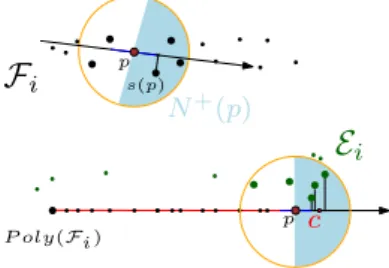
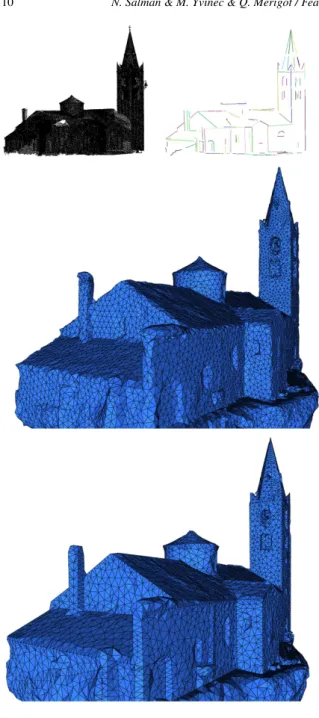
We present a new method for estimating normals that ad- dresses the requirements of real data: sensitivity to sharp features, robustness to noise, to outliers, and to
In order to increase the number of points inside N p and simultaneously increase the precision of the sharp feature, the set of feature points in N p is increased by up-sampling
