Variational integrators for reduced magnetohydrodynamics
Texte intégral
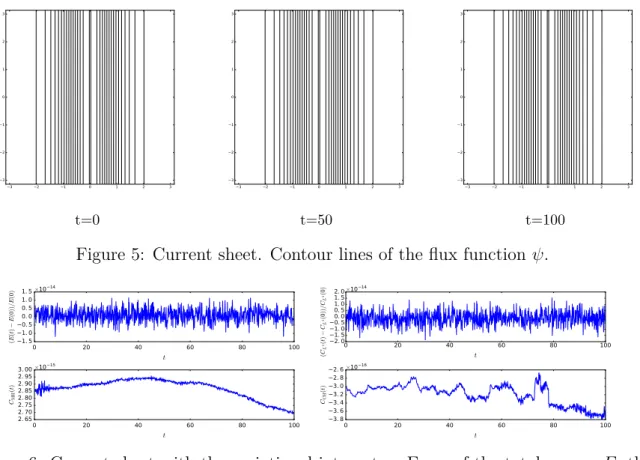
Figure
Documents relatifs
Conclude to the existence and uniqueness of a global (in time) variational solution to the nonlinear McKean- Vlasov equation..
On the other hand, for the case q = 0, the problem on the global existence of smooth solution to (1.1)–(1.4) with large initial data remains unsolved even though the
We introduce a family of DG methods for (1.1)–(1.3) based on the coupling of a DG approximation to the Vlasov equation (transport equation) with several mixed finite element methods
10, the resulting hydrodynamics (later on referred to as hydrodynamic model for self-alignment with precession) consists of a conservation law for the density and a
The main result regarding the interior error estimate is summarized in Theorem 4.5, in which we obtain that the L 2 and H 1 norms of the error in an interior region away from z
We also study deformations of minimal Lagrangian tori and show that if a deformation preserves the conformal type of the torus, then it also preserves the area, i.e.. preserves
Maintaining himself loyal to Hegel, he accepts the rel- evance of civil society, but always subordinate to the State, the true “we”, as the interests of the civil society and the
The schemes are con- structed by combing a discontinuous Galerkin approximation to the Vlasov equation together with a mixed finite element method for the Poisson problem.. We
