Adaptive control of hydraulic shift actuation in an automatic transmission
Texte intégral
Figure



Documents relatifs
L’archive ouverte pluridisciplinaire HAL, est destinée au dépôt et à la diffusion de documents scientifiques de niveau recherche, publiés ou non, émanant des
The speed variation in the open-loop control is suppressed by the closed-loop control of the speed, and the speed waveform of the system during the whole blanking process is
We use a hydrodynamic model (cf., Sections 3.1 and 3.2) to investigate the consistency of river bed undulations derived from stage-discharge rating curves and the spatial and
In real-time classical approach to FTC problem, a suitable controller is selected from the set through the monitoring of plant with a certain logic that takes the role of an
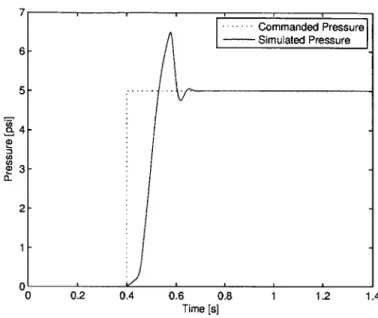
We design a novel hybrid controller, which ensures zero steady-state error and a fast non-overshooting response.. We show that the controller parameters can be conve- niently
Etablir la relation entre la vitesse angulaire du moteur par rapport au bâti, notée m et la vitesse de déplacement du piston par rapport au bâti, notée V... Fonctionnement
Velocity control system[1,2]is widely used in practical projects need for velocity control, such as turrets, radar, turntable, etc; and the projects need for
15: Estimation velocity and acceleration: (2OD, test 2) For N2OD, the position error and the control input are relatively similar than those given by 2OD. Consequently, only the
