Mémoire de fin d’études
En vue de l’obtention du diplôme : Master Académique en Géologie
Option : Génie Géologique
Thème
Numéro d’ordre (bibliothèque) :……….…..….
يلك
ـ
ع ة
ـــــ
طلا مول
ـــ
عيب
ـ
حلا و ة
ــــــ
ةاي
سق
ــــــ
م
نوكلا و ضرلاا مولع
Faculté des Sciences de la Nature et de la VieDépartement des Sciences de la Terre et de L’univers.
ةــــعماـــج
يحي نب قيدصلا دمحم
-ـجــــيــج
ــــ
لـ
Université Mohammed Seddik Benyahia - Jijel
Année Universitaire 2016-2017
Caractérisation de la résistance à la compression
simple des roches par deux techniques différentes:
Essai Uniaxial et Scratch Test
Présidente : Mme TEBIB Houria
BENSABRA Karima
Examinatrice : Mme KHERROUBA Hassiba
Encadrants : Dr. BENZAID Riad
Mr. TEKKOUK Mustapha
Je tiens avant tout à remercier, ALLAH, le tout puissant, le tout miséricordieux, qui, grâce à sa protection et sa bienveillance, nous a permis d'acquérir le savoir et d'arriver à ce niveau.
Mon premier remerciement va à Monsieur MEKERRI Kamel, Ingénieur en Géo-mécanique au service Mécanique des Roches pour ses conseils judicieux, ses orientations ainsi qu’à sa contribution à la réalisation de ce modeste travail.
Je tiens à exprimer également mes vifs remerciements au personnel du service Mécanique des Roches ainsi que l’ensemble du personnel de la Direction DLCC qui ont mis à notre disposition tous les moyens nécessaires pour accomplir notre travail dans de bonnes conditions.
Je remercie Messieurs BENZAID Riad et TEKKOUK Mustapha, mes deux encadrants pour leur soutien ainsi que pour leur orientation.
Mes remerciements s’adressent également à tous les membres de jury pour l’honneur qu’ils nous font en acceptant de juger notre travail.
Enfin je remercie mes parents et tous ceux qui ont contribués de prés ou de loin à l’élaboration de ce modeste travail, qu’ils trouvent ici l’expression de notre profonde gratitude et respects.
Résumé
Notre mémoire présente l’étude de la caractérisation des propriétés mécaniques des roches par deux techniques différentes, mais uniquement par le biais de la mesure de la résistance à la compression simple sur des carottes entières ainsi que sur des échantillons de carottes (plugs). Ces carottes et l’échantillon sont pris de quatorze (14) puits de trois (03) types de réservoirs (Schiste, Quartzites, Grès) provenant de différentes régions pétrolières Algériennes.
A l’issue des deux techniques utilisées, nous avons effectué une comparaison entre les résultats obtenus ; et ceci nous a permis de déduire que la méthodologie adoptée joue un rôle très important dans la maîtrise de la caractérisation mécanique des roches en permettant de renforcer les modèles géomécaniques par des mesures exactes et fiables.
Mots Clés : Propriétés mécaniques, résistance, carottes, plugs, caractérisation mécanique,
modèles géomécaniques.
Abstract
Our paper presents the study of the characterization of the mechanical properties of rocks by two different techniques, but only by measuring simple compressive strength on whole carrots
and on samples of plugs.
These samples and samples are taken from fourteen (14) wells of three (03) types of reservoirs (Shale, Quartzites, Tights) from different Algerian oil regions. At the end of the two techniques used, we compared the results obtained; and this allowed us to deduce that the methodology adopted plays a very important role in the control of the mechanical characterization of rocks by allowing reinforcing the geomechanical models by exact and reliable measurements.
Key Words: Mechanical properties, resistance, carottes , plugs, mechanical characterization.
ةيكيناكيملا صئاصخلا ةسارد انتركذم مدقت نيتفلتخم نيتقيرطب روخصلل طغضلا ةمواقملا سايقب انمق نكل و ، طيسبلا طقف و تبٍُع ىهع كنزك و ةهيبك ةشخظنا ىهع كنر اهنم ِزه زخأ ىج ذقن و وسىخظن ا تانيعلا ( ششع ةعبسأ ٍي 41 شئب ) ةثلاثن ( عاىَأ 30 ( يشئازدنا طفُنا قطبُي فهحخي ٍي تبَازخنا ٍي ) ـٌبش ،م زجساىك ثٌ )ًهيس شدح، بعهج ةذًحعًنا ةقٌشطنا ٌأ ىنا بُهطىج ازهب و ةَسبقي ءاشخإب بًُق ٍٍحقٌشطنا لبًعحسإ ٍي ةهظححًنا حئبحُنا ٍي بقلاطَإ سود ءبُغإب ذبًسنا و سىخظهن ةٍكٍَبكًٍنا ضئبظخنا ذٌذحج ٍي ٍكًحنا ًف لبعف و وبه جذامنلا مخأ ٍي ةٍكٍَبكٍيىٍدنا ثكأ و ةقٍقد تبسبٍق ش ةٍقاذظي . تاملكلا لا ةيحاتفم : ةٍكٍَبكًٍنا صاىخنا , ةيوبقي , ةهيبك ةشخظنا , تبٍُع ٍي ةشخظنا , ةٍكٍَبكًٍنا فٍطىج , جربًُنا ةٍكٍَبكٍيىٍدنا .
Remerciements Résumé Sommaire
Liste des tableaux Liste des abréviations Liste des figures
Introduction generale --- 01
CHAPITRE 1 : Étude bibliographique 1.1.Introduction---03
1.2. État de contrainte en un point ---04
1.2.1. Notions de contraintes --- 04
1.2.2. La contrainte moyenne --- 04
1.2.3. Vecteur de contrainte --- 05
1.2.4. Notations et conventions de signes --- 06
1.2.5. Accroissement des composantes de la contrainte --- 07
1.2.6. Loi de réciprocité des contraintes tangetielles --- 08
1.2.7. Contraintes et directions principales --- 10
1.2.8. Tenseurs déviatorique et sphérique --- 11
1.2.9 Ellipsoïde des contraintes (ellipsoïde de Lamé) --- 12
1.3. Déformation des roches --- 13
1.3.1.Types de déformation --- 13
1.3.2. Mesure de la déformation --- 14
1.4. Mécanisme physiques de la déformation des matériaux sous chargement mécanique --- 15
1.5. Comportement mécanique des corps solides --- 16
1.6. Comportement mécanique des roches et phénomène d’écrouissage --- 17
1.7. Comportement des roches au laboratoire --- 18
1.7.1.Résistance à la compression simple d’une roche --- 18
1.7.1.1. Facteurs influençant la résistance à la compression d’une roche --- 19
1.7.1.2. Comportement des roches sous chargement axial --- 19
1.7.2.2. Modèle de coupe en grattage --- 24
1.7.3. Approche compression simple-scratch test --- 25
1.7.4. Conclusion --- 27
CHAPITRE 2 : Techniques expérimentales et procédures d'essais 2.1.Introduction: --- 28
2.2. Domaine d’utilisation des deux techniques --- 28
2.3. Equipement Scratcher --- 29
2.3.1. Définition --- 29
2.3.2. Avantage de scratch test --- 29
2.3.3. Principe de mesure --- 29
2.3.4. Description de l’équipement --- 30
2.3.5. Système d’acquisition des données --- 31
2.3.6. L’outil de grattage --- 32
2.3.7. Conditions d’essai --- 33
2.3.7.1. Vitesse de déplacement --- 33
2.3.7.2. Profondeur de coupe --- 33
2.3.8. Mode opératoire --- 33
2.3.8.1. Mise en place de la carotte --- 34
2.3.8.2. Préparation de la surface du test --- 34
2.3.8.3.Test et photographie de la rainure --- 35
2.3.8.4. Analyse et traitement des données du test --- 36
A. La sélection des meilleurs passes de grattage --- 36
B. Elimination des parties insignifiantes du profil UCS --- 37
C. Création du fichier data numérique et graphe coloré --- 39
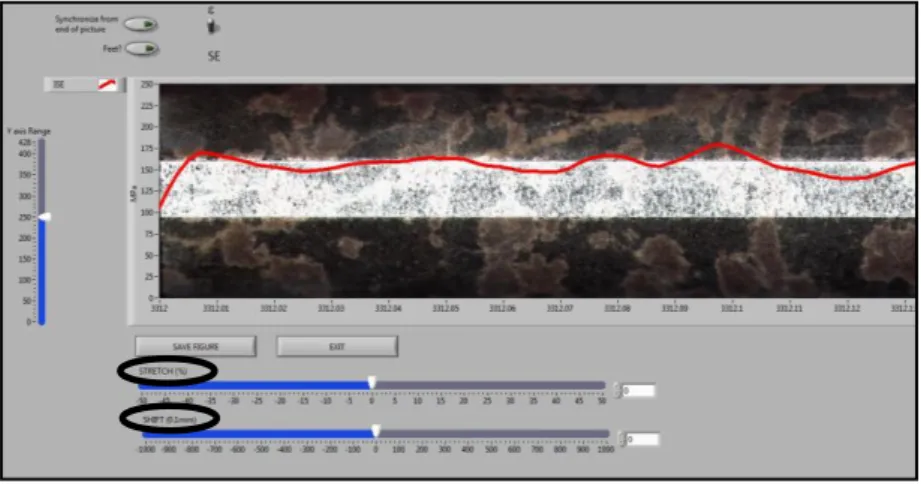
D. Superposition du profil de l’UCS sur la photo de la rainure --- 39
2.4. Banc d’essai triaxial --- 40
2.4.1. Définition --- 40
2.4.2. Gamme des essais réalisés par l’équipement --- 40
2.4.3. Principe de mesure --- 40
2.4.4. Description de l’équipement --- 41
2.4.4.1. Les générateurs de pression (pompes): --- 42
2.4.4.4. Organes de sécurité de l’équipement --- 45
2.4.5. Conditions d’essai --- 45
2.4.6. Mode opératoire --- 45
2.4.6.1. Préparation des échantillons --- 45
2.4.6.2. Mise en place de l'échantillon --- 46
2.4.6.3. Test (l’essai proprement dit) --- 47
2.4.6.4.
I
nterprétation des données --- 482.5. Conclusion --- 52
CHAPITRE 3 : Étude expérimentale 3.1. Introduction: --- 53
3.2. Programme expérimental --- 54
3.2.1. Essais sur carottes (scratch test) --- 54
3.2.2.Essais sur éprouvettes cylindriques (plugs): --- 57
3.3. Paramètres d'essai --- 58
3.3.1. Essai de scratch --- 58
3.3.2. Essai de compression simple --- 59
3.4. Methodes d'analyse des donneés expérimentales --- 59
3.5. Présentation et discussion des résultats --- 61
3.5.1. Résultats de l’essai scratch --- 61
3.5.1.1. Les Schistes (Shale) --- 61
3.5.1.2. Quartzites --- 64
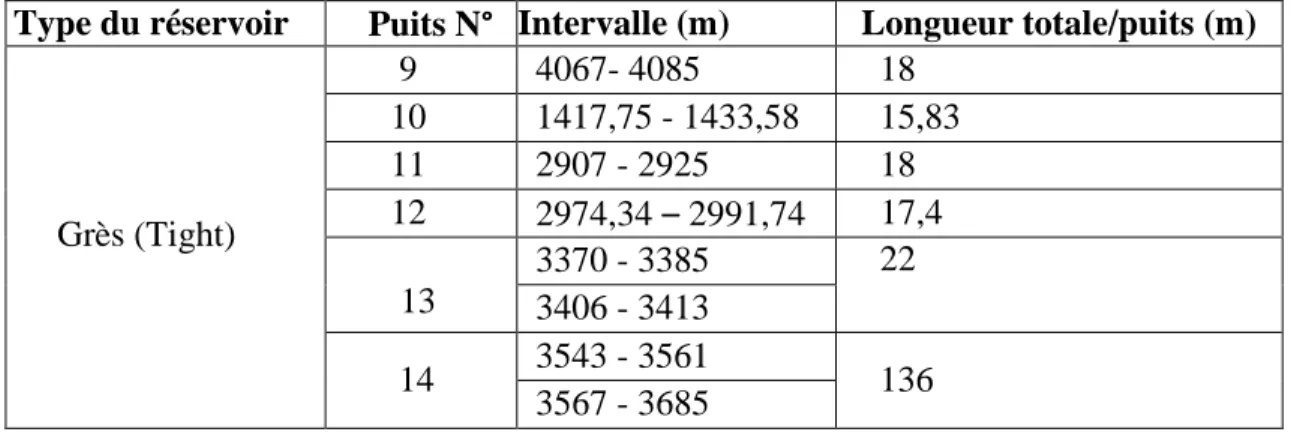
3.5.1.3. Grès (Tights) --- 70
3.5.1.4. Conclusion --- 76
3.5.1.5.Comparaison entres les UCS des trois types de réservoirs --- 76
3.5.2. Résultats de l’essai de compression un-iaxial --- 77
3.5.2.1. Les Shales --- 77
3.5.2.2. Quartzites --- 77
3.5.2.3. Les Grès (Tights) --- 77
3.5.2.4. Conclusion --- 79
3.6. Comparaison entres les résultats des essais de scratch et ceux de essai UCS --- 79
3.6.3. Les Tights --- 84 3.7. Conclusion --- 90 Conclusion générale --- 91 Recommandations --- 92 Références bibliographiques Annexes
Tableau 2.1: les caractéristiques techniques de l’équipement scratcher --- 30
Tableau 2.2: Caractéristiques techniques du banc triaxial --- 42
Tableau 2.3: Exemple de données brutes --- 48
Tableau 2.4: Input et output d’EXCELSHEET du traitement de données --- 49
Tableau 3.1: Intervalles et longueur des carottes des puits de Schiste (Shale) --- 55
Tableau 3.2: Intervalles et longueur des carottes des puits de Quartzite --- 55
Tableau 3.3: Intervalles et longueur des carottes des puits de Tight --- 55
Tableau 3.4: Nombre d'éprouvettes cylindriques des puits Schiste (Shale) --- 57
Tableau 3.5: Nombre d'éprouvettes cylindriques des puits Quartzite --- 57
Tableau 3.6: Nombre d'éprouvettes cylindriques des puits Grés (Tight) --- 57
Tableau 3.7: Résultas des essais uniaxiaux puits de quartzites --- 78
Tableau 3.8: Résultas des essais uniaxiaux puits de Grès (Tights). --- 78
DTD : Division Technologies et Développement, MDR : Mécanique des Roches,
ISRM: International Society for Rock Mechanics, ASTM: American Society for Testing and Materials, P : Pression, (Pa)
ΔF: Unité de force, (N) ΔA: Unité de surface, (m2) σ: Contrainte normale, (Pa) ΔN: Unité de force normale, (N) τ: Contrainte tangentielle, (Pa) E : Module de Young, (GPa) ɛ : Déformation, (μm/m)
UCS : Unixial Compressive Strength, (MPa) Δσaxi: Variation de contrainte axiale, (MPa) Δεaxi: Variation de déformation axiale, (μm/m) d0 : Diamètre initial de l’échantillon, (m) L0 : Longueur initiale, (m)
d1 : Diamètre final de l’échantillon, (m) L1 : Longueur finale de l’échantillon, (m) ɛaxiale : Déformation axiale, (μm/m) ɛradiale : Déformation radiale, (μm/m)
ΔL: Variation de longueur de l’échantillon, (μm) Δd: Variation de diamètre de l’échantillon, (μm) ν: Coefficient de Poisson,
ΔV: Variation de volume de l’échantillon, V : Volume initial de l’échantillon, σdév: Contrainte déviatorique, (MPa) σax: Contrainte axiale, (MPa)
σrup: Contrainte de rupture, (MPa)
σax max : Contrainte axiale maximale, (MPa) σ1: Contrainte verticale ou axiale, (MPa) w : Largueur de couteau, (mm)
d : Profondeur de coupe, (mm)
V : Vitesse de déplacement de couteau, (mm/s) Fcn: Force de coupe normale, (N)
Fct: Force de coupe tangentielle, (N)
: Rapport de proportionnalité des forces de coupe normale et tangentielle,Ψ : l’angle d’inclinaison de la force de coupe avec la normale portée par la surface du couteau, (°)
wd : section transversale de la rainure ou surface de contact couteau-roche, (mm2)
R2: Coefficient de corrélation, Ρc : Pression de confinement, (MPa) P1 : Pression axiale, (MPa)
P2 : Pression de confinement, (MPa)
Def,axi : Déformation axiale à temps t, (μm/m) Def,radi : Déformation radiale à temps t, (μm/m) Def,voli : Déformation volumique à temps t, (μm/m) (Δ σax)i : Variation de contrainte axiale, (MPa)
(Δ Def, axi)i : Variation de déformation axiale, (μm/m) (Δ Def, rad)i : Variation de déformation radiale, (μm/m)
Liste des figures
CHAPITRE 1: Etude bibliographique
Figure 1.1 : Un corps solide en équilibre --- 04
Figure 1.2 : Contrainte normale et tangentielle --- 05
Figure 1.3 : Composantes de contraintes --- 06
Figure 1.4 : Elément soumis à une contrainte normale --- 07
Figure 1.5 : Réciprocité des contraintes tangentielles --- 09
Figure 1.6 : L’ellipsoïde des contraintes --- 13
Figure 1.7 : Différents types de déformation --- 14
Figure 1.8 : Déformations fragile et ductile --- 14
Figure 1.9 : Déformation relative d’un matériau --- 14
Figure 1.10 : Comportement réversible --- 15
Figure 1.11 : Comportement non réversible --- 15
Figure 1.12 : Modèles de comportement fondamentaux --- 16
Figure 1.13 : Exemples de comportement des corps réels --- 17
Figure 1.14 : Courbe effort-déformation d’un essai de compression simple --- 18
Figure 1.15 : Différentes phases de déformation d’une roche sous chargement uniaxial - 19 Figure 1.16 : Déformation élastique --- 20
Figure 1.17 : Phase plastique. --- 21
Figure 1.18 : La déformation sous chargement uni-axial --- 21
Figure 1.19 : Processus du test de scratch et les forces générées. --- 22
Figure 1.20 : Modes de grattage lors du scratch test --- 23
Figure 1.21 : Schéma du régime de grattage ductile et fragile --- 23
Figure 1.22: Représentation schématique du principe de coupe --- 24
Figure 1.23 : Modèle de coupe de l’essai scratch --- 25
CHAPITRE 2 : Techniques expérimentales et procédures d'essai
Figure 2.1 : Vue frontale de l’équipement Scratcher --- 31
Figure 2.2 : Photos de l'outil de grattage --- 32
Figure 2.3 : Fenêtre principale du logiciel --- 34
Figure 2.4 : Fenêtre principale de logiciel d’acquisition et traitement de données --- 35
Figure 2.5 : Sélection des meilleures passes de grattage. --- 37
Figure 2.6: Elimination des parties insignifiantes --- 36
Figure 2.7: Configuration du graphe coloré --- 39
Figure 2.8: Superposition du profil de l’UCS sur la photo de la rainure --- 40
Figure 2.9: Vue de face du banc triaxial --- 41
Figure 1.10: Jauges de déformation --- 44
Figure 2.11: LVDT et extensomètre --- 44
Figure 2.12: Processus de préparation des échantillons pour essais de compression --- 46
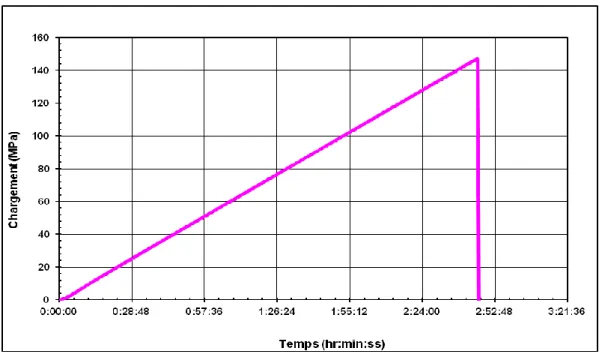
Figure 2.13: Programmation des essais de compression --- 48
Figure 2.14: Augmentation de la contrainte axiale au cours d’un essai de compression --- simple --- 50
Figure 2.15: : Graphe contraintes-déformations d’un essai de compression simple --- 50
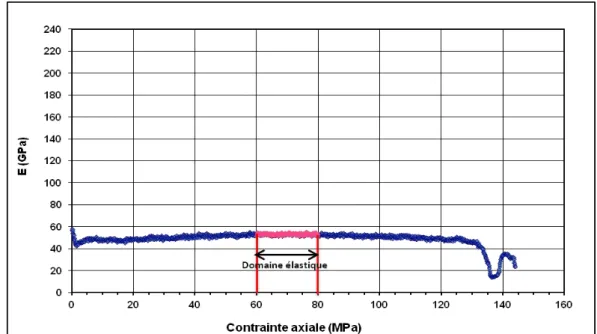
Figure 2.16: : Variation du module de Young en fonction de la contrainte axiale --- 51
Figure 2.17: : Variation du coefficient de Poisson en fonction de la contrainte axiale --- 51
CHAPITRE 3 : Etude expérimentale Figure 3.1 : Carottes de Schiste (Shale) --- 56
Figure 2.2 : Carottes de Qaurtzite --- 56
Figure 3.3 : Carottes de Grès (Tight) --- 56
Figure 3.4 : plugs qaurtzites --- 58
Figure 3.5 : plugs de (Grès) Tight --- 58
Figure 3.6 : plugs de Schiste (shale) --- 58
Figure 3.7 : Processus de traitement des données de l'essai de scratch --- 60
Figure 3.8 : Profils de la résistance à la compression simple de puits N°1 et 2 --- 62
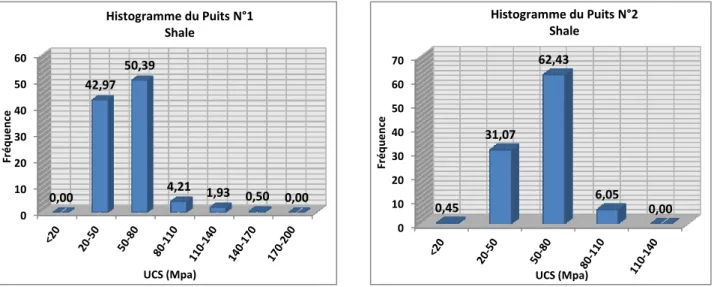
Figure 3.9 : Histogrammes de l’UCS de puits N°1 et N°2 --- 63
Figure 3.10 : Profils de la résistance à la compression simple de puits N°3 et 4 --- 65
Figure 3.11 : Histogrammes de l’UCS de puits N°3 et N°4 --- 65
Figure 3.12 : Profils de la résistance à la compression simple de puits N°5 et 6 --- 67
Figure 3.15 : Histogrammes de l’UCS de puits N°7 et N°8. --- 68
Figure 3.16 : Profils de la résistance à la compression simple de puits N°9 et 10. --- 71
Figure 3.17 : Histogrammes de l’UCS de puits N°9 et N°10 --- 71
Figure 3.18 : Profils de la résistance à la compression simple de puits N°11 et 12 --- 73
Figure 3.19 : Histogrammes de l’UCS de puits N°11 et N°12 --- 73
Figure 3.20 : Profils de la résistance à la compression simple de puits N°13 et 14 --- 75
Figure 3.21 : Histogrammes de l’UCS de puits N°13 et N°14 --- 75
Figure 3.22 : Histogrammes de l’UCS des trois réservoirs --- 76
Figure 3.23 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 1 --- 80
Figure 3.24 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 3 et 4 --- 81
Figure 3.25 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 5 et 6 --- 82
Figure 3.26 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 7 et 8 --- 83
Figure 3.27 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 9 et 10 --- 84
Figure 3.28 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 11 et 12 --- 85
Figure 3.29 : Comparaison entre UCS Plugs et UCS Scratch du puits N° 13 et 14 --- 86
Figure 3.30 :Corrélation UCS Plugs-UCS Scratch de roches Tights --- 88
Figure 3.31 :Corrélation UCS Plugs-UCS Scratch de roches Quartzites --- 88
Figure 3.32 :Corrélation UCS Plugs-UCS Scratch de trois roches réservoirs, shale, --- quartzites et Grés (tight) --- 89
1
Introduction générale
Les propriétés mécaniques des roches sont fondamentales pour résoudre et prédire les différents problèmes d’ordre géomécanique où la difficulté principale consiste à obtenir des informations sur les roches rencontrées et traversées le long des puits pétroliers. La résistance à la compression simple est l’une des propriétés mécaniques les plus importantes et la plus utilisée en mécanique des roches. Cette propriété est connue aussi sous le nom UCS (Uniaxial Compressive Strentgh).
En géomécanique, les ingénieurs se basent essentiellement sur les essais de compression uni-axial pour mesurer la résistance en compression simple des roches rencontrés dans les différentes situations auxquelles ils sont confrontés au cours de l’exploitation des hydrocarbures. Nous citons à titre d’exemple : la stabilité de la paroi des puits, la compressibilité de la matrice rocheuse, la compaction des couches induite par la variation de la pression de gisement, la maîtrise de la géométrie des fractures hydrauliques, la prédiction et la réduction des problèmes des venues de sable, la complétion (1) et l’injection des fluides. Cependant, les progrès scientifique et technologique réalisés dans le domaine de caractérisation de cette propriété mécanique permettent, aujourd’hui, de réaliser ces essais d’une manière indirecte et continue ; et par conséquent avoir des mesures de plus en plus fiables.
Notre mémoire présente la caractérisation des propriétés mécaniques des roches à partir de deux méthodes expérimentales différentes : la première est une méthode classique, il s’agit de l’essai à la compression uniaxial, la seconde est plutôt nouvelle connue sous le nom de l’essai de scratch. En l’occurrence, nos objectifs seront les suivants :
Mieux cerner le processus de caractérisation en résistance à la compression simple des roches pétrolières, adopté au sein du laboratoire mécanique des roches de la Division Technologies et Développement de SONATRACH ; et permettant d’associer les résultats des deux techniques de part et d’autre, afin d’obtenir un ensemble de données expérimentales précises et fiables indispensable pour les modèles géomécaniques.
Améliorer nos connaissances en matière de caractérisation mécanique des roches. Réaliser une comparaison entre les deux techniques et leurs résultats obtenus.
2
Ce mémoire comporte trois (03) chapitres. Dans le premier chapitre, essentiellement bibliographique, nous faisons d’abord un rappel portant sur les notions et les définitions des contraintes, déformations et comportements rhéologiques des matériaux. Puis, nous introduisons le comportement des roches au laboratoire sous l’effet d’un effort axial et celui de grattage. Nous terminons ce chapitre en présentant l’approche entre les deux essais, compression simple et scratch. Les deux techniques ainsi que leurs principes de mesure proprement dit font l’objet du second chapitre. Plus précisément, nous présentons deux machines (le scratcher et le banc d’essai triaxial) et l’intérêt de leur utilisation dans le domaine pétrolier ainsi que leurs modes opératoires. Les méthodes de traitement de données des deux essais ont été aussi exposées dans ce chapitre.
Dans le troisième chapitre, nous présentons un ensemble de résultats expérimentaux obtenus à partir des campagnes d’essais uni-axiaux et de scratch, menés sur trois types de roches réservoirs pétrolières en permettant de tirer quelques conclusions quant à la caractérisation mécanique de ces types de réservoirs. Ces résultats expérimentaux, une fois synthétisés, seront discutés et comparés entre eux pour illustrer, d’une part, l’apport de chaque mesure, et d’autre part, la complémentarité et la relation dégagée entre les résultats de ces deux techniques qui enrichissent davantage la caractérisation mécanique des roches.
Enfin, des conclusions et des recommandations seront présentées.
Aussi, nous présentons dans les annexes des informations complémentaires qui permettent de mieux appréhender le sujet traité dans ce mémoire.
3
1.1. Introduction
La géomécanique est l’étude du comportement mécanique des roches soumises à des sollicitations extérieures. On entend par sollicitations extérieures les effets pouvant avoir des influences sur les propriétés de la roche. Parmi ces sollicitations nous citons les pressions, la température, les réactions chimiques, etc.
Dans notre cas d’étude, on s’intéresse qu’aux sollicitations qui ont une grande influence sur le comportement mécanique des roches, à savoir, les forces et les pressions. En théorie et dans la plupart des cas observés en pratique, on a rapporté l’existence de plusieurs cas d’instabilité des ouvrages souterrains, notamment les puits pétroliers, dus à l’état des contraintes autour de ces derniers. Donc, la connaissance de l’état des contraintes est très importante qui est essentiellement estimé à partir de plusieurs propriétés mécaniques des roches qui se résument principalement en deux familles : la rupture (représentant l’état de résistance) et la déformabilité (représentant l’état de déformations).
Les propriétés mécaniques des roches sont évaluées avec plusieurs méthodes et par différentes sollicitations mécaniques (compression simple, grattage, traction, compression triaxiale, cisaillement, etc.), et ceci, à partir des échantillons continus de différentes dimensions et formes.
Dans le cadre de ce chapitre, nous allons nous intéresser uniquement au cas de mesure de la résistance à la compression simple (UCS1). Après avoir présenté quelques généralités et définitions, nous passerons au comportement de la roche sous l’effort d’écrasement et de grattage, réalisés successivement par les deux techniques qui ont fait l’objet de ce mémoire à savoir l’essai de compression simple (uni-axial) et l’essai de scratch.
(1)
4
1.2. État de contrainte en un point 1.2.1. Notions de contraintes
L’état de contrainte est l’ensemble des forces de réaction qui se développent à l’intérieur d’un corps sous l’effet de charge extérieures. Considérons un corps solide soumis à diverse sollicitation, et proposons-nous de lui appliquer la méthode du plan coupant (méthode des sections) en vue de déterminer les forces intérieures qui s’exercent au niveau d’un point donné de ce corps (Figure 1.1a). La section ainsi pratiquée partage le corps en deux parties dont chacune, prise isolément, se comporte comme étant en équilibre sous l’action des forces extérieures qui lui sont appliquées et des réactions exercées sur elle par l’autre partie et considérées ici comme force extérieures elle aussi (Figure 1.1b).
Figure 1.1. Un corps solide en équilibre (Benzaid, 2011).
Avec cette méthode du plan coupant, les forces internes à l’origine deviennent externes et, doivent être égale aux sollicitations externes (pour maintenir l’équilibre de la partie subsistante du corps). Ces forces sont uniformément réparties sur la section (a-a) et leur répartition suivant cette section représente leur intensité (Figure 1.1b). Dans le cas d’effort interne, cette intensité s’appelle contrainte (Megnounif et Djafour, 1994 ; Benzaid, 2011).
1.2.2. La contrainte moyenne
Dégageons autour du point (A) une petite aire ∆s, soit F la résultante des forces intérieures appliquées à cette aire (Figure 1.1c), le rapport de la force appliquée à la surface en question est :
A A Forces extérieures (a) (b) Forces intérieures élémentaires (c) Δs F
5 P (a) P τzy τ zx (b) N Pmoy = s F (1.1)
Cette quantité s’appelle contrainte moyenne.
1.2.3. Vecteur de contrainte
Si nous faisons tendre ∆s vers zéro, le rapportPmoy tend, en vertu de la continuité supposée
de la matière, vers une limite déterminéeP. Par définition, le vecteur de contrainte totale en un point de la surface ∆s est :
P = lim F/ ∆s = Fd/ds (1.2)
Lorsque ∆s 0
La quantité Preprésente lacontrainte réelle ou simplement la contrainte au point donné de la section donnée. Ce vecteur peut être décomposé en deux composantes (Figure 1.2a) : La première normale au plan de la section notée oun
et appelée contrainte normale. L’autre reposant dans le plan de section (tangentielle), notéeet dite tangentielle.
Suivant les forces appliquées, peut avoir dans le plan de la section une direction quelconque. Par commodité, est représentée sous la forme de deux composantes orientées dans le sens des axes des coordonnées (Figure 1.2b).
Le vecteur de contraintePvarie d’un point à l’autre ; mais en un point donné, il varie également avec l’orientation de ∆s ou autrement dit, il change avec l’orientation du vecteur normalN .
6 Y Z X σz σx σy τYX τYZ τXZ τZX τZY τXY τYX τYZ σy
1.2.4. Notations et conventions de signes
D’une façon générale un seul indice est utilisé pour définir une contrainte normale. Cet indice représente la direction de la normale à la face sur laquelle agit cette contrainte. Par exemple σx : représente la contrainte normale agissant sur un plan perpendiculaire à l’axe X.
Une contrainte normale est considéré positive lorsqu’elle agit à la traction, c’est-à-dire lorsqu’elle s’écarte de la surface sur laquelle elle agit. Si elle se dirige vers la surface, c’est une contrainte de compression et elle est considérée négative. Pour les contraintes de cisaillement (tangentielles), deux indices sont utilisés pour les définir. Le premier indique la direction de la normale au plan considéré et le deuxième, la direction de la composante elle-même. Pour le sens positif des contraintes tangentielles, il est défini en fonction du sens positif des contraintes normales.
A la base de ceci, sur le petit élément de la Figure 1.3 on a représenté toutes les composantes de contraintes qui peuvent agir sur un élément quelconque, d’une façon générale dans leurs sans positifs (Megnounif et Djafour, 1994 ; Benzaid, 2011). .
Figure 1.3. Composantes de contraintes (Benzaid, 2011).
Enfin on considérons toutes ces composantes de contraintes, on peut dire que la contrainte en un point quelconque A avec : A (x,y,z), est généralement définie par la matrice suivante : = z y z zx yz y x y xz y x x
, cette matrice est appelée tenseur des contraintes (1.3)
7
1.2.5. Accroissement des composantes de la contrainte
Concéderons le petit élément plan de la Figure 1.4 de dimensions (dx, dy) ; d’une façon générale la contrainte varie d’un point à un autre. Pour définir cette variation, on considérera le cas le plus simple ou l’élément est soumis uniquement à une contrainte normale dans la direction de l’axe X comme le montre sur la Figure 1.4.b.
Figure 1.4. Elément soumis à une contrainte normale (Benzaid, 2011).
Si la contrainte au point A est σX, la contrainte au point B obtenue par un calcul différentiel
classique est (Megnounif et Djafour, 1994 ; Benzaid, 2011) :
XB = X + dx x x (1.4)
La dérivée partielle est utilisée car la contrainte σX dépend non seulement de l’axe X mais
de Y et éventuellement de Z. De manière similaire les contraintes aux points C et D seront :
XC = XB + dy y B X (1.5) XD = X + dy y X (1.6)
D’où, l’équation (1.4) dans (1.5) donne :
XC = X + X X X d + dy y X (1.7)
Où les termes d’ordre supérieur sont négligés puisque (dx) et (dy) sont très petits. En négligeant ainsi ces termes, on remarque que les contraintes sur les faces AD et BC sont linéairement distribuées.
D’où la force agissant sur la face AD sera : 2 2 1 ) ( 2 1 dy y dy F dy F X X AD XD X AD (1.8) A B C D dx dy (a) A X D X B X C X (b) X X X X d X C D A B (c)
8 Et sur la face BC : 2 2 1 ) ( 2 1 dy y dy d x dy F dy F X X X X BC XC B X BC (1.9)
Ce qui implique que, la force résultante agissant ainsi sur l’élément ABCD sera : dy dx F F F X X AD BC ABCD . (1.10) En expriment cette force par unité de surface (dy.1) on obtient l’accroissement de contrainte suivant (dx) ; soit : X X X d (1.11)
Finalement, si la face AD est soumise à une contrainte σX , la contrainte résultante sur la face
BC sera : X + X X X d (1.12)
1.2.6. Loi de réciprocité des contraintes tangentielles
Considérons un petit élément tridimensionnel de dimensions (dx, dy et dz) suivant les directions X, Y et Z respectives, (Figure 1.5).
En prenant l’équilibre des moments produits par les composantes des contraintes par
rapport à l’axe (A-A) on aura (Megnounif et Djafour, 1994 ; Benzaid, 2011) : (τyz.dx.dz). 2 dy - (τzy.dx.dy). 2 dz + 2 ) ( dy dx dz dy y yz yz + 2 ) ( dz dx dy dz z y z y z = 0 (1.13)
En négligeant les différentielles d’ordre supérieur on aura :
τyz . dx. dy. dz – τzy. dx. dy. dz = 0 (1.14)
D’où :
τ
yz= τ
zy(1.15)
De la même manière on peut démontrer que :
τ
xy= τ
yx etτ
xz= τ
zxRemarque : on a représenté sur la Figure 1.5b que les composantes de contraintes
donnant réellement un moment par rapport à l’axe (A-A) ; les autres composantes ne produisent pas de moments.
9 Y X Z dz z zy y z zy yz y dy yz yz dy dz dx
●
A A (+) Mts dx x x x x dx x xy xy Y X Z dx x xz xz xy xz dz z zx zx zx y yx dy y y y dy y yx yx dz z z z zy yz dz z zy zy dy y yz yz z (a) Cas général des contraintes (en tenant compte de l’accroissement)
(b) Les composantes de contraintes donnant réellement un moment par rapport à l’axe (A-A) Figure 1.5. Réciprocité des contraintes tangentielles (Benzaid, 2011).
10
1.2.7. Contraintes et directions principales
Le tenseur des contraintes est défini dans un repère quelconque X, Y, Z. Dans certains cas il est plus commode de choisir un repère de telle façon à ce que les contraintes de cisaillement τij soient nulles et seules les contraintes normales sont différentes de zéro. Ce
type de repère est appelé repère principal et les contraintes normales correspondantes sont appelées contraintes principales.
Le tenseur des contraintes principales s’écrit dans le nouveau repère comme suit :
= 3 2 1
0
0
0
0
0
0
; cette matrice est appelée tenseur des contraintes (1.16)
Les contraintes normales
1,
2 et
3 sont appelées contraintes principales et lesorientations des axes du repère seront appelées directions principales.
Ces directions principales sont donc obtenues en résolvant le système d’équations suivant, pour chaque valeur de la contrainte principale (Megnounif et Djafour, 1994 ; Benzaid, 2011) : l
I i m = 0 (2.22) nPar exemple en portant la valeur de σ1 dans l’équation suivante :
l (σx - σ) + m τxy + n τxz = 0 l τxy + m (σy - σ) + n τyz = 0 (2.23) l τxz + m τyz + n (σz - σ) = 0 On aura :
0 0 0 1 1 1 Z YZ XZ YZ Y XY XZ XY X n m l n m l n m l (2.24)11
Ce qui donne le premier groupe des cosinus directeurs : l1, m1, n1, pour σ1. De la même
manière pour σ2 on aura : l2 , m2 , n2 et pour, σ3 on aura : l3 , m3 , n3
1.2.8. Tenseurs déviatorique et sphérique
Pour l’étude du comportement des matériaux il est préférable, dans plusieurs cas, de décomposer le tenseur de contrainte [σ] en un tenseur sphérique [σS] et un tenseur déviatorique [σd
] soit (Megnounif et Djafour, 1994 ; Benzaid, 2011). :
[σ] = [σs] + [σd] (2.25) Avec : [σS] = m m m 0 0 0 0 0 0 Où m= 3 3 3 2 1 X y Z
(appelée contraintes moyenne).
A partir de l’équation (2.25) le tenseur déviatorique peut s’écrit comme suit :
m Z YZ XZ YZ m y Xy XZ Xy m X S d (2.26)En calculant la trace du tenseur [σd
] on aura :
Trace = (σx – σm) + (σy – σm) + (σz – σm) =σx + σy + σz – 3 σm = 0
Si le tenseur des contraintes a une trace nulle, on dit que ce tenseur est déviatorique.
Remarques :
- La partie sphérique [σs] est un tenseur ayant même trace que le tenseur [σ] (c’est-à-dire la Σ des termes de la première diagonale de [σS] = celle de [σ]) et ayant 3 valeurs propre
égale entre elles et valant m ce qui implique que toute direction de l’espace est une direction principale.
- La partie déviatrice [σd] est un tenseur ayant une trace nulle. C’est la présence du tenseur déviatorique qui induit des déviations sur les directions des contraintes. Ce tenseur est le responsable de l’existence de contrainte tangentielles et de la différence qui apparaît entre les contraintes normales et la contrainte moyennem. Ceci s’explique, à l’évidence, par le fait que la partie sphérique ne fait intervenir aucune contrainte tangentielle ni aucun écart concernant les contraintes normales.
12
Les directions principales du tenseur [σ] sont les mêmes que celles du tenseur dévaitorique [σd] et les contraintes principales s’obtiennent par simple translation des contraintes
principales dévaitoriques. Si (σdi ) désigne la contrainte principale déviatorique, le calcul
des trois valeurs de (σdi ) revient à résoudre le polynôme du troisième degré :
σd3 – j1.σd2 – j2.σd – j3 = 0 (2.28)
Où j1, j2, j3 sont les trois invariants du tenseur déviatorique.
1.2.9. Ellipsoïde des contraintes (ellipsoïde de Lamé)
Dans un repère principal X, Y, Z, les composantes de la contrainte agissante sur tout plan inclinée sont définies par :
qX = l σx
qY = m σy (2.39)
qZ = n σz
En faisant varier la position deN , il est possible de déterminer l’ensemble des positions de
l’extrémité deqdonc de trouver la distribution des contraintes autour d’un point M d’un milieu continu. Dans le repère global, on montre qu’il s’agit d’un ellipsoïde dont l’équation rapportée au repère principal s’écrirait comme suit (Bùi Công Thành 2001; Benzaid, 2011) :
D’où : 1 2 2 2 Z Z y Y x X q q q (2.40)
C’est l’ellipsoïde des contraintes dont les demi-axes sont les contraintes principales aux points considérés (Figure 1.6).
A partir de cette équation d’ellipsoïde on peut définir quelques cas particuliers d’état de contraintes :
(a) si l’une des contraintes principales est nulle l’ellipsoïde se réduit à une ellipse. C’est un état de contrainte plane.
(b) si deux des trois contraintes principales sont nulles, il s’agit d’un état de contrainte uni axial, correspondant à une traction ou compression simple.
(c) si deux des trois contraintes principales sont égales l’ellipsoïde est de révolution. (d) si les trois contraintes principales sont égales l’ellipsoïde devient une sphère. Dans ce
cas trois (03) directions quelconques mais perpendiculaires entre elles peuvent être prisses comme axes principaux.
13 Y Z X M qz qy r Ơ1 Ơ2 Ơ3
●
●
●
qx●
Remarque : l’ellipsoïde des contraintes est interpréter comme étant le lieu géométrique
des extrémités des vecteurs des contraintes totales.
Figure 1.6. L’ellipsoïde des contraintes (Benzaid, 2011)
Dans le cas de l’enfouissement, un volume de roche subit selon l’axe vertical une pression
lithostatique créée par le poids des roches qui correspondent à
1. Il subit aussi dans leplan horizontal l’action des roches voisines exerçant une pression de confinement
exprimée par
2 et
3 qui sont égales dans le cas d’un état isotrope.1.3. Déformation des roches 1.3.1. Types de déformation
La déformation caractérise la manière dont réagit une roche quand elle est soumise à des sollicitations mécaniques, elle représente le changement de forme d’une roche sous l’effet d’une contrainte.
Un champ de contraintes peut produire deux types de transformations sur un volume de roche à savoir (Figure 1.7) :
- Un déplacement global du volume par translation et rotation rigide, q
14
Déformation ductile Déformation fragile
- Un changement des positions relatives des particules constituant le volume ce qui représente à la déformation au sens strict.
Figure 1.7. Différents types de déformation
La déformation traduit les changements de forme subis par la roche elle peut être ductile ou fragile (Figure 1.8). Selon les forces appliquées et leurs directions, il se produit soit une compression, soit une extension ou un cisaillement.
Figure 1.8. Déformations fragile et ductile (Benzaid, 2011). 1.3.2. Mesure de la déformation
Si on note par l0 la langueur d’un corps solide avant chargement et par l sa longueur après
chargement (Figure 1.9), alors la quantité
ε
= (l – l0)/ l0 est appelée déformationlongitudinale ou déformation relative dans l’une des directions du repère considéré. Cette
déformation sera notée
ε
(Benzaid 2011).
Figure 1.9. Déformation relative d’un matériau (Beauchanp, 2003). Rotation
15 Limite élastique σe (déformation permanente) ∆ε ε σ
1.4. Mécanisme physiques de la déformation des matériaux sous chargement mécanique
Élasticité : l’application d’efforts mécanique modifie les distances interatomiques à partir des distances d’équilibre au repos et leur suppression conduit au retour à la position initiale, (Figure 1.10). Les courbes contrainte-déformation sont réversibles en élasticité mais pas toujours linières à cause des hétérogénéités (Benzaid, 2011).
Figure 1.10. Comportement réversible (Benzaid, 2011).
En élasticité, la déformation est réversible et proportionnelle à l’intensité de la contrainte.
Plasticité : au terme plasticité sont associées l’existence de déformations permanentes et la non linéarité des courbes contrainte-déformation. La déformation conserve la valeur atteinte lorsque la contrainte cesse (le déchargement est effectué à un niveau de contrainte plus élevé, Figure 1.11 (par exemple : à la fin de linéarité des déformations axiales ε1, des déformations irréversible apparaissent). Celles-ci sont qualifiées de
plastiques et le matériau à un comportement élasto-plastique.
16 ε σ ε σ ε σ
(a) Corps élastique (b) Corps rigide plastique (c) Corps visqueux
Endommagement : l’endommagement est la détérioration du matériau ; détérioration progressive de la cohésion de la matière sous l’action des sollicitations monotones ou répétées, conduisant à la rupture de l’élément de volume. Il y a donc une notion de variation des propriétés physiques et mécaniques liées à des phénomènes de décohésion entraînant une irréversibilité (les grains ne se recollent pas). Les défauts initiaux de la matière jouent un rôle non négligeable dans l’amorçage et/ou la propagation des fissures (Benzaid, 2011).
1.5. Comportement mécanique des corps solides
On étudie expérimentalement la réaction d’un corps solide à l’action d’un champ de contrainte en lui appliquant une force de valeur croissante et en mesurant la déformation totale produite. On distingue trois modèles de comportement fondamentaux (Figure 1.12).
(a) Les corps élastiques : la déformation est réversible et proportionnelle à l’intensité de la
contrainte ; le temps n’intervient pas dans la déformation.
(b) Les corps plastique : la déformation ne se produit qu’à partir d’un certain seuil de
contrainte. Lorsque ce seuil est atteint, la déformation se produit sans qu’il soit possible d’augmenter la valeur de la contrainte (la déformation conserve la valeur atteinte lorsque la contrainte cesse).
(c) Les corps visqueux : la valeur de la déformation dépend de la durée d’application de la
contrainte, pour une contrainte donnée non nulle, la déformation se fait à vitesse constante. Après suppression de la contrainte, le système conserve son état final.
17 Durcissement plastique ε σ Fluage Élastique Durcissement ε σ Rupture Élastique σe σe
σe : limite élastique ou seuil de plasticité
(a) Roche, déformation ductile
(Comportement élastique parfaitement plastique)
(b) Roche, déformation fragile
(Comportement élasto-plastique)
Les corps réels ne sont jamais parfaitement élastiques, plastique ou visqueux. Dans le cas général, ils combinent les propriétés des trois types fondamentaux. C’est le cas par exemple, des roches qui sont élastique pour une contrainte faible et deviennent plastique lorsque la contrainte devient plus forte (Figure 1.13). Le passage du comportement élastique au comportement plastique s’appelle Le durcissement (la roche subit des modifications irréversibles dans sa structure). La déformation de la roche peut rester ductile mais s’accroître au cours du temps, bien que la valeur de la contrainte reste constante, c’est le fluage. Dans d’autre cas, il apparaît une rupture, la roche est dite fragile.
Figure 1.13. Exemples de comportement des corps réels (Benzaid, 2011). 1.6. Comportement mécanique des roches et phénomène d’écrouissage
Représentons par un diagramme orthogonal les résultats d’un essai de compression uni- axiale, nous obtiendrons la courbe de la Figure 1.14.
Le long du chemin OA le comportement est élastique, c.à.d. lorsque on décharge on revient en O. Le point A, est un point limite au-delà duquel on n’a plus le comportement élastique, il correspond à une contrainte caractéristique dite seuil de plasticité initial ou limite élastique.
Après l’avoir franchi, et si étant au point B, par exemple, on décharge, le chemin de déchargement ne sera pas BAO mais BCD. Ce qui implique que la déformation qui reste (OD = εP
) est une déformation irréversible, dite plastique, on est donc entré dans le domaine plastique.
Si on recharge, le chemin sera DEF. Le point F étant le prolongement du chemin OAB, il rejoint alors le chemin du premier chargement.
18 σ ε F H B A D E C G O
•
•
•
•
•
•
•
•
σ1 σoOn peut assimiler en général la courbe BCDEF à la droite DGH et admettre que les déformations sont réversibles le long de cette ligne. Ce qui implique que le nouveau seuil de plasticité est alors le point H qui est plus élevé que le point précédent A. Cette élévation du seuil de plasticité s’appelle l’écrouissage.
Figure 1.14. Courbe effort-déformation d’un essai de compression simple (Benzaid, 2011).
1.7. Comportement des roches au laboratoire
Dans cette partie, nous décrivons seulement le comportement de la roche au cours des deux sollicitations mécaniques, écrasement et grattage, appliquées pour mesurer la résistance à la compression simple dans les deux essais de laboratoire ciblés par la présente étude à savoir l’essai de compression uni-axiale et le scratch test.
1.7.1. Résistance à la compression simple d’une roche
La résistance à la compression simple est la contrainte maximale par une roche soumise à une charge d’écrasement. Cette propriété mécanique est déterminée par l’amplitude de la contrainte nécessaire pour provoquer une rupture.
Dans un essai de compression uni-axial, la résistance à la compression est égale au quotient de la charge maximale supportée par l’aire initiale de la section de l’éprouvette souvent sous forme cylindrique.
19
Autrement dit, la contrainte de rupture en compression simple correspond à la contrainte qu’il est nécessaire d’appliquer verticalement sur l’échantillon testé à une pression de confinement nulle pour obtenir la rupture. Cette propriété est exprimée en MPa ou en bars.
1.7.1.1. Facteurs influençant la résistance à la compression d’une roche
Les propriétés mécaniques d’une roche, à l’instar de la résistance à la compression simple, varient selon la nature de la roche (type de roche), mais aussi selon la densité, la porosité, la composition minéralogique, le type de ciment, la température, la vitesse de déformation appliquée au cours d’un essai, etc. Ces facteurs influencent aussi le comportement rhéologique de la roche (Beauchanp, 2003).
Les études sur l’influence de la profondeur ont montrées que la résistance à la compression simple semble être indépendante de la profondeur et que les résultats obtenus présentent une grande dispersion dans une même couche.
1.7.1.2. Comportement des roches sous chargement axial
Le comportement d’un matériau sous chargement axial met en évidence trois phases principales. Une première phase non-linéaire contractante dans laquelle on a une diminution du volume de roche, une deuxième phase linéaireréversible et une troisième phase non-linéarité plus importante avec un comportement dilatant tardive.
Lors de l’application d’une charge d’écrasement sur une roche lors d’un essai de compression simple, cette dernière se comportera selon quatre phases de déformation distinctes : (1) phase de serrage, (2) élasticité, (3) plasticité et (4) rupture (Figure 1.15).
Figure 1.15.Différentes phases de déformation d’une roche sous chargement uniaxial (Beauchanp, 2003).
20
(a) Phase de serrage :ce phénomène est du à la fermeture des microfissures mais aussi à l’adaptation des palteaux de la machine de copression avec les deux faces de l’échantillon (Beauchanp, 2003).
(b) Phase d’élasticité : dans cette phase, la relation entre les déformations et les contraintes qui sont appliquées est univoque. La linéarité signifie que l’application d’une contrainte double engendre une déformation double, où toute déformation est annulée lors de la suppression de la contrainte appliquée (Beauchanp, 2003).
Dans ce cas, on dit que la roche a un coportement élastique (Figure 1.16) et obéit à la loi
de Hooke qui est exprimée comme suit :
σ = E. ε (1.41) Avec σ la contrainte, E le module d’ Young et ε la déformation relative.
Figure 1.16. Déformation élastique (Beauchanp, 2003).
Deux principaux paramètres élastiques sont définis dans cette phase et qui sont le module de Young et le coefficient de Poisson.
Module de Young (E) : Le module de Young « E »est le rapport entre la variation de la
contrainte axiale et la variation des déformations axiales associées durant la phase de déformation élastique.
E = Δ σ /Δ ε (1.42)
Les roches à haute résistance tendent également à avoir un grand module de Young, dépendant du type de roche et de ces propriétés physico-mécaniques.
Coefficient de Poisson (ν) : On appel coefficient de Poisson, le rapport des déformations
transversale à la déformation longitudinale, lorsque le chargement uni-axiale est orienté suivant la direction longitudinale
Physiquement un coefficient de Poisson négatif n’a pas de sens, donc, il est précédé d’un signe négatif pour le rendre positif.
21
Le coefficient de Poisson est sans dimension, il est généralement compris entre 0 < ν < 0,5, alors que pour la plupart des roches il se situe entre 0,1 < ν < 0,35.
(c) La phase plastique : cette phase est caractérisée par son non linéarité à cause de la
création des fissures ce qui rend les déformations de cette phase non réversible (Figure 1.17).
Figure 1.17. Phase plastique (Beauchanp, 2003).
(d) La phase de rupture : si la contrainte appliquée dépasse le seuil de rupture, la roche
est déformée de façon permanente ; il en résulte une déformation plastique ou une déformation cassante en fonction du comportement ductile ou fragile de la roche. Dans un essai de compression simple, la rupture de l’échantillon se fait par écaillage ou en
colonnettes. L’éprouvette se casse selon une fente parallèle à la direction de
σ
1 (Figure1.18).
22
1.7.2. Comportement des roches sous l’effort de grattage (scratch test)
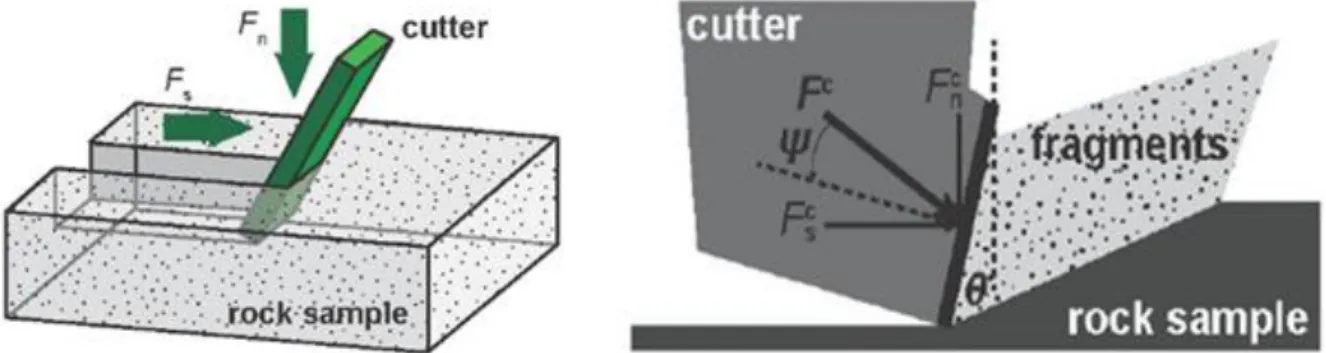
Le test de grattage est une technique utilisée pour évaluer les propriétés mécaniques des roches. Le test en lui-même est réalisé sous un déplacement constant de l’outil de grattage (sous forme de couteau) sur la surface de la roche (échantillon) contrôlé par deux paramètres constants (profondeur de coupe et vitesse de déplacement). L’interaction couteau-roche se caractérise généralement par la coexistence de deux processus, à savoir : la fragmentation de la roche devant la face du couteau et le frottement le long de la surface (Voir Figure 1.19). Cela génère une déformation par cisaillement sur la surface de contact couteau-roche équivalente à celle produite lors d’un test de compression simple.
Figure 1.19. Processus du test de scratch et les forces générées (EPSLOG, 2013)
.
1.7.2.1. Modes de grattage de la roche
Lors du test de grattage sur les roches, la force de coupe est transmise via le contact particule-particule en formant un chargement de résistance linéaire sur la roche. Ce phénomène crée des micro-cracks sur la surface de la roche et finit par une rupture.
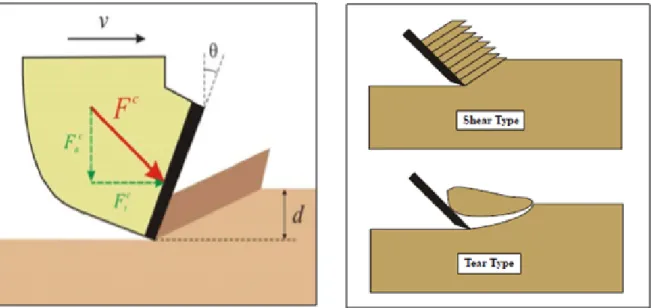
La rupture générée par le test de scratch est liée à deux modes de grattage qui dépendent directement de la profondeur de coupe (Figure 1.20) :
- Mode ductile (Shear Type), - Mode fragile (Tear type).
A de petites profondeurs de coupe, la roche est fortement cisaillée devant l’outil de
grattage (couteau en diamant industriel) et écrasée à la pointe. L’avancement de l’outil de grattage procède de la même manière le long de l’échantillon. Ce mode de grattage se caractérise principalement par une décohésion de la matrice consécutive et des grains de la roche, avec l’accumulation progressive des grains et de la poudre devant le couteau. De ce point de vue, ce mode de grattage est définie comme ductile.
23
Figure 1.20. Modes de grattage lors du scratch test (EPSLOG, 2013)..
A de grandes profondeurs de coupe, une transition vers le mode de grattage fragile se
produit. Les événements isolés du mode de grattage fragile peuvent facilement être reconnus. Des fissures macroscopiques sont initiées à partir du bout du couteau et se propagent d’une manière instable devant l’outil de grattage. Des fragments de roche, appelés « chips », sont créés et éliminés par l’outil. Ce processus est cyclique et se caractérise par une déformation instable accompagnée d’un bruit important (EPSLOG, 2013).
La différence entre les deux modes de grattage est visible dans la forme du signal de forces. Avec une roche homogène possédant un faible degré de changement de résistance le long de la direction de grattage, le signal de forces peut apparaitre plus stable (mode ductile), alors qu’en mode fragile le signal apparait très fluctuant, comme les dents d’une scie (Voir Figure 1.21).
24
1.7.2.2. Modèle de coupe en grattage
Le principe de ce test est d’enlever un volume de roche V de l’échantillon testé, en appliquant une énergie appelée énergie spécifique. Cette dernière représente l’énergie nécessaire pour enlever une unité de volume de roche à l’aide d’un couteau, ayant une relation directe avec le processus de coupe avec une technique basée sur l’énergie spécifique interne ε ou la résistance à la compression simple (UCS) de l’échantillon.
Le travail généré par l’outil de grattage est représenté par la relation liant la résistance à la compression simple de la roche et le volume de roche enlevé, comme illustré dans la relation suivante :
W = ε . V (1.43)
W : le travail (énergie spécifique) fourni par l’outil de grattage pour arracher une unité
de volume de roche,
ε : l’énergie spécifique intrinsèque ou résistance à la compression simple, V : le volume de roche arraché.
Dans ce modèle de coupe, la résistance à la compression simple a également une relation directe avec la force tangentielle à la surface de contact couteau-roche.
Le test lui-même consiste à tracer une rainure sur la surface de l’échantillon à une faible profondeur de coupe d fixe avec une vitesse constante v durant l’essai. L’essai est réalisé à l’aide d’un couteau en diamant synthétique possédant une largeur (w) et une inclinaison d’un angle θ, comme montré sur la Figure 1.22.
25
Le déplacement du couteau le long de l’échantillon de roche génère des forces normales Fcn et tangentielle Fct qui sont mesurées en continu à l’échelle centimétrique
et sur lesquelles est basé le modèle de coupe de l’interaction couteau – roche.
Le test est réalisé en plusieurs passes en augmentant à chaque fois la profondeur de coupe. La relation entre la moyenne des forces tangentielles mesurées durant chaque passe en fonction de la profondeur de coupe permet de dégager la résistance à la compression simple, comme illustré dans la Figure 1.23.
Figure 1.23. Modèle de coupe de l’essai scratch (EPSLOG, 2013).
1.7.3. Approche compression simple – scratch test
Selon l’effort appliqué, on distingue plusieurs modes de rupture des roches. Dans notre cas, nous nous intéressons qu’au processus de déformation des roches par l’effort d’écrasement et de grattage. Vu que ces derniers fournissent la même propriété mécanique qui fait l’objet de ce travail, Il est également important de comprendre le lien entre les deux processus de rupture de roche.
Fct= ε wd (1.44) Fcn =
ε wd (1.45) FctFct
26
Les mesures des contraintes et des déformations lors des essais de compression
simple permettent de tracer la courbe contraintes-déformations (Figure 1.24), à
partir de laquelle on peut calculer les propriétés mécaniques et le travail de rupture (c.à.d. l’énergie spécifique, W).
Figure 1.24. Diagramme contraintes-déformation d’un échantillon de roche (EPSLOG,
2013).
La résistance à la compression simple est définie comme suit :
UCS = σ = F/A (1.47)
L’énergie spécifique de rupture est égale à :
W = σ . ε (1.48)
Avec,
σ : la résistance à la compression simple de la roche, A : La section,
ε : la déformation de la roche.
Le principe de mesure du scratch test est basé aussi sur la mesure du travail (l’énergie spécifique, W) nécessaire pour arracher une unité de volume de roche, modélisé par la relation (1.43) donnant W = ε . V .
Avec :
W : le travail (énergie spécifique) fourni par l’outil de grattage pour arracher une
unité de volume de roche,
ε : l’énergie spécifique intrinsèque équivalente à la résistance à la compression
simple de la roche,
V : le volume de roche arraché. σ
ε Fragile
27
Donc, le point commun entre le phénomène de rupture généré par l’effort d’écrasement et celui généré par l’effort de grattage du scratch test, est l’énergie
spécifique nécessaire pour créer une rupture dans un échantillon de roche. 1.7.4. Conclusion
Le but de cette étude bibliographique est, d’une part, de connaitre les comportements rhéologiques fondamentaux des roches, et d’autre part, de mieux cerner le comportement des roches au cours des deux essais de mesure de la résistance à la compression, adoptés au sein du laboratoire mécanique des roches de la Division Technologies et Développement de SONATARCH.
28
2.1. Introduction
Le comportement et les propriétés mécaniques des roches sont définis après avoir fait une large gamme d’essais au laboratoire ; et cela à partir des échantillons continus de différentes dimensions et formes. Ces essais fournissent les propriétés mécaniques des roches nécessaires à la résolution des problèmes qui surviennent régulièrement au cours de l’exploitation des réservoirs pétroliers.
Pour mesurer la résistance à la compression simple au laboratoire, il existe plusieurs techniques et cela dépend parfois, de type, forme et taille d’échantillon de roche, des conditions du test ou de l’objectif de mesure (le volume de données nécessaires pour résoudre les problèmes géomécaniques existants).
Nous présenterons, au cours de ce chapitre, les deux techniques (le banc d’essai triaxial et le scratcher) de mesure de la résistance à la compression simple des roches adoptés au sein du laboratoire mécanique des roches (DTD (1) de SONATRACH) et la méthodologie à suivre pour chaque technique.
L’objectif de ce chapitre est de donner au lecteur les éléments nécessaires pour mieux appréhender l’utilisation de ces deux techniques dans la mesure de la résistance à la compression simple des roches.
Vu que la technique de scratch test est nouvellement introduite dans la caractérisation mécanique des roches, une attention particulière est portée sur cette technique.
2.2. Domaines d’utilisation des deux techniques
Vu l’importance du paramètre mesuré par ces deux techniques et son large utilisation dans les différentes modélisations géomécaniques, l’application de ces deux techniques dans le domaine pétrolier s’étale principalement sur les activités suivantes :
- Le forage : optimiser de la densité de boue en cours de forage et traitement des
problèmes de la stabilité des parois du puits,
- La fracturation hydraulique : améliorer le design de la fracturation hydraulique, - La production : traiter des problèmes des venues de sable,
- La géologie : améliorer de la description géologique en identifiant d’une manière
précise la variation des faciès.