Quartz probes for embedded micro-robotics and imaging
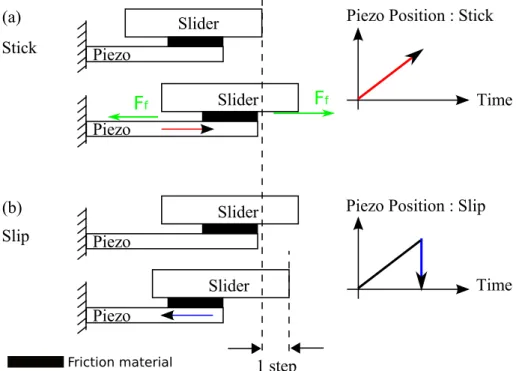
Texte intégral
Figure
![Figure 1.5 - Micro-robotic platforms and positioners designed for SEM integration; from left to right and top to bottom from the Universities of Toronto [ ? ], Shizuoka [ ? ], Oldenburg [ ? ] and Nagoya [ ? ].](https://thumb-eu.123doks.com/thumbv2/123doknet/14494804.718145/27.892.164.691.390.824/platforms-positioners-designed-integration-universities-toronto-shizuoka-oldenburg.webp)
Documents relatifs
Second, for each computation path from p\ to p2 not using more than 5 space, beginning and ending at the left margin of wm + lrn \ and never crossing its right margin, there exists,
A scientific note: Foragers deposit attractive scent marks in a stingless bee that does not communicate food location... Apidologie 40 (2009) 1–2 Available online
The initial task in Episode 2 was to find an osculating plane for a curve at a point, which was defined in terms of the unit tangent and normal vectors -- the objects that
Picard, Non linear filtering of one-dimensional diffusions in the case of a high signal to noise ratio, Siam J. Picard, Filtrage de diffusions vectorielles faiblement
In contrast to the standard investment game our modified games have two key features: (i) in order to achieve a higher performance than the subgame perfect payoff both players need to
Saber ver, analizar, reflexionar sobre todos los elementos que nos puede mostrar una buena evaluación es acercarnos a un proceso de mejora contínua y de calidad no sólo en el
In contrast, in the two lesioned animals (Mk1 and Mk2), the somatic cross-sectional areas of the SMI-32 positive neurons in layer V were significantly smaller in the
The 2D view of this line is depicted in Fig. 5B) and illustrates where the maximum acceleration factor for each image size is located in practice for this particular sequence to
