Improved error estimates for splitting methods applied to highly-oscillatory nonlinear Schrödinger equations
Texte intégral
Figure
Documents relatifs
The Crank-Nicolson method is a well known method of order 2 but is fully implicit and one may prefer a linearly implicit method like the relaxation method introduced in [10] for
A both mathematical and numerical detailed study of the method has thus led to a fully complete adaptive time stepping strategy that guarantees an effective control of the errors
Operator splitting methods have gained a lot of attention in recent years to solve numerically partial differential equations, as the subsystems obtained are usually easier to solve
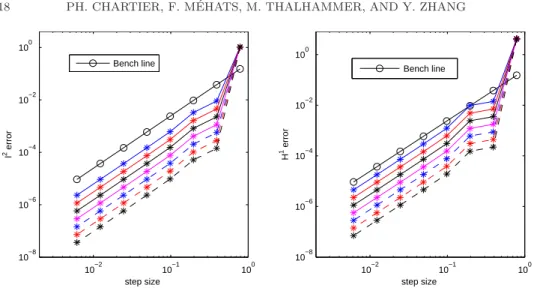
In Figure 3, the global errors of the second-order and fourth-order multi-revolution composition methods combined with the fourth-order splitting method, obtained for the linear
We first present numerical experiments for the nonlinear Klein-Gordon equation in the nonrelativistic limit regime, then we consider a stiffer problem, the nonlinear Schr¨
Considering (4.2) as initial data, Table 4.2 shows the failure in the spatial error by solving the original equation (1.1) in the highly oscillatory regime, where we use the
Moreover, when this splitting is coupled with spectral methods (and under some assumptions detailed in the sequel), the so-obtained method is able to capture to a very high accuracy
When applied to the numerical integration of highly oscillatory systems of differential equations, the technique benefits from the properties of standard composition methods: it
