Dielectric Resonator Antennas: Theory and Design
by
Beng-Teck Lim
Submitted to the Department of Electrical Engineering
in partial fulfillment of the requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
February 1999
(Beng-Teck Lim, 1999. All rights reserved.
The author hereby grants to M.I.T. permission to reproduce and distribute publicly
paper and electronic copies of he thesis and to grant others the right to do so.
A A
Author
...
k
= . . . .. . . .Department of Electrical Engineering
January 15, 1999 . I
Certified
by..,.--.· o,.. % ,; ".. I... . .. .. . .. .. ...Certified by
.. ... .. ... . .. .. ...Ali Tassoudji
Qualcomm Inc.
_J
Thesis Supervisor
Jin Au Kong
Professor
Thesis Supervisor
/ . ' ./Accepted
by...;
;-
-
L._:."I...
. .-.
...
.
...
Arthur C. Smith
Chairman, Department Committee on Graduate Theses
ARCHIVES
Dielectric Resonator Antennas: Theory and Design
by
Beng-Teck Lim
Submitted to the Department of Electrical Engineering
on January 15, 1999, in partial fulfillment of the requirements for the degree of
Master of Engineering in Electrical Engineering and Computer Science
Abstract
Theoretical models for the analysis of Dielectric Resonator Antenna (DRA) are developed. There are no exact solutions to many of the problems in analytical form, therefore a strong focus on the physical interpretation of the numerical results is presented alongside theoreti-cal models. I have used the physitheoreti-cal interpretation of the numeritheoreti-cal results to lay down some
important design rules. A few new inventions associated with the DRA are also included.
These are the elliptical DRA, the DRA with a rectangular slot, the adjustable reactance
feed, the triangular DRA and the dual band DRA-patch antenna.
Thesis Supervisor: Ali Tassoudji Title: Qualcomm Inc.
Thesis Supervisor: Jin Au Kong
Acknowledgments
It is my pleasure to acknowledge the assistance of the wonderful staff at Qualcomm library for helping me to find many of the research materials. Usually, I only need to send them an email for a paper, and within a few days, the paper would be ready for my perusal. I do try to look for many of the materials myself at the University of California at San Diego (UCSD) library. This is possible because the UCSD library extended to me via Qualcomm Library level 9 privilege to use their materials. Also important is the funding from Qualcomm via the VI-A internship program as well as discussions regarding the thesis subject with Ali Tassoudji who is also my Qualcomm thesis supervisor. Yi-Cheng Lin and Randy Standke assisted me on using the HFSS which is a finite element simulation tool. The email correspondences with Professor Jin Jiang-Ming from University of Illinois on the subject of Method of Moments and Finite Elements, and Professor Allen Glisson from University of Mississippi on the subject of the Body of Revolution, were also very helpful.
It is also my pleasure to acknowledge the many good professors who have taught me important concepts in electromagnetism. These professors are Professor Jin Au Kong who taught me 2 semesters of graduate Electromagnetism, Professor Bose who taught me 1 semester of Acoustics, and Professor John Belcher who often responded so quickly to my questions on electromagnetism despite that he was never my professor for any subject. The
Junior Lab training - the experiments, the oral presentations, the Q and A sessions after
Contents
1 Introduction 11
1.1 Background ... 11
1.2 Basic Characteristics ... 13
1.2.1 Physical Dimensions and Electrical Properties ...
13
1.2.2 Modes ... 14
1.2.3 Feeding structures ... 15
1.2.4 Radiation Patterns ...
17
1.3 Method of Analysis . . . ... . 18
1.4 Summary ... 19
2 Resonance and Bandwidth
20
2.1 Introduction . . . ... 202.2 Formulation of the Cylindrical Dielectric Resonator using the Magnetic Wall
Model
... ...
. 21
2.2.1 Summary and physical interpretation ...
25
2.2.2 Perturbation Correction to the Magnetic Wall Model ... 27
2.3 A note on fine tuning . . . .. .. . . 32
2.4 Degeneracy and its similarities to the Zeeman effect - Symmetry ...
34
2.5 Formula for resonance frequency of DR ... .. 36
2.6 Bandwidth and Q-factor ... 39
2.7 The relationship between the resonant frequency and the Q-factor ...
40
2.8 Criteria for Qrad-factor for radiation applications and approximate formulas 41 2.9 Summary ... 42
3 Radiation for HE
1la mode
3.1 Introduction ...
3.2 Field lines and Multipoles ... ...
3.3 A Model for the Radiation Mechanism ...
3.4 Calculating the radiation pattern for the DRA using equivalence principle..
3.5 Finite Ground Plane Effects ...
...
3.6 Summary ...
4 Input Impedance of the DRA at HEllz mode
4.1 Introduction ...
4.2 Numerical Results.
4.3 Finite Ground Plane effects on the Input Impedance
4.4 Method for tuning the real part of the Impedance..
4.5 Summary ...
5 The
5.1 5.2 5.3 5.4 5.5 5.6 5.7 5.8Ring Resonator and a few DRA-Related Inventions
Introduction
...
Ring resonator ...
DRA with diagonal slot for Circular Polarization (CP) . .
Elliptical DRA for Circular Polarization (CP) ...
Triangular DRA for Circular Polarization ...
The Paddle Feed ...
Dual Band DRA-Patch Antenna ...
Summary.
6 Conclusion
A Simulation Results of Input Impedance for various Aspect Ratio
B Results of Input Impedance Simulation for the Ring Resonator
44
44 45 46 48 50 57 58 58 59 63 65 66 68 68 68 71 82 88 92 96 100 101 103 111List of Figures
1-1 Coordinate System ... 14
1-2 A DRA fed using a slot aperture ... 16
1-3 A DRA fed using a monopole. ... 17
1-4 Radiation Pattern as a function of elevation angle for a typical circular DRA with the two modes excited in quadrature phase ... 18
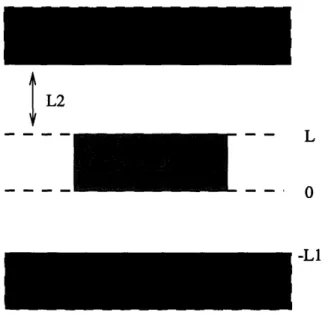
2-1 The DRA is placed at z=O and the boundary condition at z=-L1 and L2 is that of a perfect conductor ... 22
2-2 Top: The Electric Field vector seen from a side view cut for the HE11a mode. Bottom: The Magnetic field vector seen from a cut along the equatorial plane for the HE11, mode ... 27
2-3 Region around and at the DRA is separated into 6 regions ... 28
2-4 Capacitor electric field lines at DC ... 32
2-5 Resonant wavenumber of different modes of an isolated cylindrical dielectric
resonator with relative epsilon = 45. ...
38
2-6
Qradof different modes of an isolated cylindrical dielectric resonator with
Er = 45. ... 423-1 Top: E-field lines at the equatorial plane of the DRA. Bottom: the H-field
lines at 0 = 0 for TEo1 6 . ... 453-2 Top: H-field lines at the equatorial plane of the DRA. Bottom: the E-field lines at 0 = 0 for TMo,1. ... 46
3-3 A A/4 transmission line cavity ... 47
3-4 A A/2 transmission line cavity ... 48
3-6 Radiation pattern for Ground plane diameter = 2.96 inch ...
52
3-7 Radiation pattern for Ground plane diameter = 3.7 inch ...
53
3-8 Radiation pattern for Ground plane diameter = 6.06 inch ...
53
3-9 Radiation pattern for Ground plane diameter = 9.16 inch ... 54
3-10 Radiation pattern for Ground plane diameter = 12.28 inch ...
55
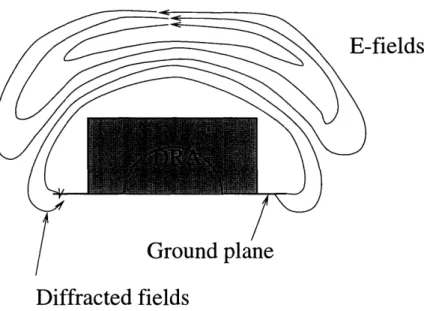
3-11 Electric field lines for the DRA on a finite ground plane for HEll11 mode .. 56
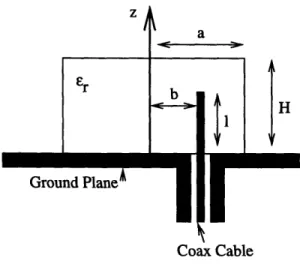
4-1 Geometry of probe-fed cylindrical DRA in the plane containing the axis of
the DRA and the probe ...
60
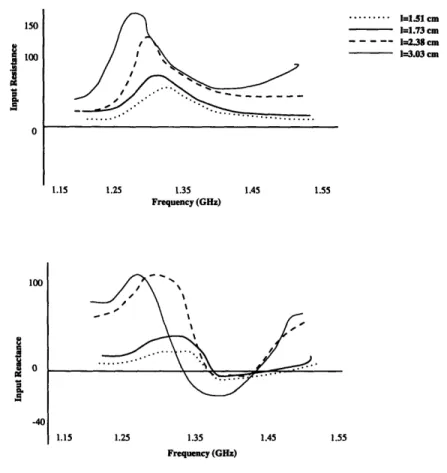
4-2 Input impedance of a dipole as a function of aspect ratio and electrical length 61 4-3 Input impedance of a DRA as a function of probe length, 1 ... 62
4-4 Model for the input impedance ... 63
4-5 Input Impedance as a function of ground plane size ... 64
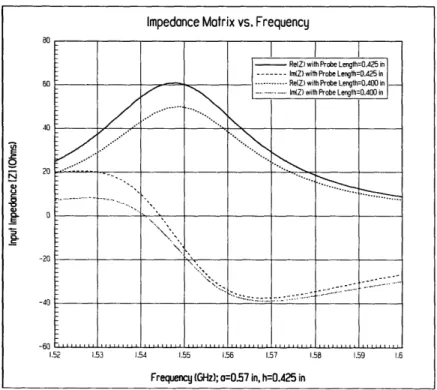
4-6 Input Impedance for a cylindrical DRA with a=0.57in, h=0.425 in and probe length 0.400 inch and 0.425 inch ... 65
5-1 Cylindrical and Ring Resonators . ... 69
5-2 Geometry of the diagonal Slot ... 72
5-3 Input Impedance for W=0.420 in, H=0.425 in, L=0.05 in ... 73
5-4 E-field lines at the equatorial plane of the DRA with rectangular slot. Top:
The field lines at 1.56 GHz (lower resonance) Bottom: The field lines at 1.65 GHz (higher resonance) ... 745-5 Radiation Pattern for W=0.420 in, H=0.425 in, L=0.05 in ... 75
5-6 Input Impedance for W=0.210 in, H=0.425 in, L=0.05 in ... 76
5-7 Input Impedance for W=0.530 in, H=0.425 in, L=0.05 in ... 77
5-8 Input Impedance for W=0.420 in, H=0.425 in, L=0.025 in ... 78
5-9 Input Impedance for W=0.420 in, H=0.425 in, L=0.075 in ... 79
5-10 The different parameter for the case run for L ... 80
5-11 Input Impedance for W=0.420 in, H=0.2125 (lower) in, L=0.05 in ... 80
5-12 Input Impedance for W=0.420 in, H=0.2125 (upper) in, L=0.05 in ... 81
5-14 E-field lines at the equatorial plane of the DRA with rectangular slot. Top: The field lines at 1.575 GHz (lower resonance) Bottom: The field lines at
1.620 GHz (higher resonance) ... 83
5-15 Real part of input impedance for an elliptical DRA with a=0.5 in, b=0.57
in, and h=0.425 in; excited with a monopole of height 0.425 in ... 845-16 Imaginary part of input impedance for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a monopole of height 0.425 in . . . 85
5-17 Smith chart for S11 for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a monopole of height 0.425 in ... . 86
5-18 Radiation Pattern as a function of elevation angle for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a monopole of height 0.425 in ... 87
5-19 Radiation Pattern as a function of azimuth angle for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a monopole of height 0.425 in ... 87
5-20 Geometry of the Triangular DRA ... 89
5-21 Reflections of the Wave inside a Triangular DRA ... 89
5-22 Input Impedance of the Triangular DRA . ... 90
5-23 Radiation Pattern of the Triangular DRA as a function of elevation angle 91 5-24 Radiation Pattern of the Triangular DRA as a function of azimuth angle .. 91
5-25 Geometry of the Paddle Feed in comparison with the traditional Monopole 92 5-26 Smith Chart showing the reflection coefficient parameter S1 1of the elliptical DRA using a Paddle Feed ... 94
5-27 Radiation Pattern as a function of elevation angle for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a capped probe of height 0.425 in ... 95
5-28 Radiation Pattern as a function of azimuth angle for an elliptical DRA with a=0.5 in, b=0.57 in, and h=0.425 in; excited with a capped probe of height 0.425 in ... 95
5-29 Geometry of the DRA patch antenna ... 97
5-30 Input Impedance of the DRA patch antenna near the resonant frequency for
the patch antenna ...
98
5-31 Input Impedance of the DRA patch antenna near the resonant frequency for
the DRA antenna. . . . ... 99
A-1 Input Impedance for a cylindrical DRA with a=0.57 in, h=0.15 in, 1=0.15
in, Er = 45 . . . . ... ... 104
A-2 Input Impedance for a cylindrical DRA with a=0.57 in, h=0.20 in, 1=0.20
in, Er = 45 . . . . ... ... 105
A-3 Input Impedance for a cylindrical DRA with a=0.57 in, h=0.30 in, 1=0.30
in, Er = 45 . . . ... ... 106
A-4 Input Impedance for a cylindrical DRA with a=0.57 in, h=0.425 in, 1=0.425
in, Er = 45 . . . . . . . ... 107
A-5 Input Impedance for a cylindrical DRA with a=0.57 in, h=0.475 in, 1=0.475
in, Er = 45 . . . ... 108
A-6 Input Impedance for a cylindrical DRA with a=0.57 in, h=1.5 in, 1=1.5 in,
Er = 45 ...
...
.
109
A-7 Input Impedance for a cylindrical DRA with a=0.57 in, h=1.5, 1=0.425 in,
Er = 45 ...
...
.
110
B-1 Input Impedance for a ring resonator for a=0.57 in, b=0.05 in, h=0.425 in,
r = 45 ...
...
. 112
B-2 Input Impedance for a ring resonator for a=0.57 in, b=0.15 in, h=0.425 in,
Er = 45 ...
...
.
113
B-3 Input Impedance for a ring resonator for a=0.57 in, b=0.25 in, h=0.425 in,
Er = 45 ...
...
. 114
B-4 Input Impedance for a ring resonator for a=0.57 in, b=0.3 in, h=0.425 in,
r = 45 ... . 115
B-5 Input Impedance for a ring resonator for a=0.57 in, b=0.35 in, h=0.425 in,
List of Tables
1.1 Salient Features of Modes of a Cylindrical DR ... 15
2.1 Comparison of Resonant Frequency for HEM 1 mode using empirical
for-mula by Mongia and the Magnetic wall model developed in this section. .. 26
2.2 Comparison of Resonant Frequency for HEM1ll mode for a cylindrical
res-onator in free space using empirical formula by Mongia and the magnetic
wall model with the perturbation correction (Perturbation) ...
31
2.3 Value of P for various modes of a cylindrical DR ... 40
2.4 Resonant Frequencies and Q Factors of the Five lowest modes for a cylindrical
DRA with dimensions a=5.25 mm, L=4.6 mm, and er = 38 ...
41
4.1 Input resistance as a function of Aspect Ratio ... 60
4.2 The Resonant Frequency and Input Impedance for various Ground plane sizes 64
5.1 Comparison of Resonant Frequency for HE 11 mode between numerical
sim-ulation by finite elements (FE) and the material perturbation (MP) model
Chapter 1
Introduction
1.1 Background
This thesis is the documentation of the research that was performed on Dielectric Resonator
Antennas when I was at Qualcomm. The significance of this thesis is that it resulted in
some important theoretical models for resonant frequency, radiation, and input impedance. It also gives the design rules for tuning the frequency and the input impedance. In the course of gaining this understanding, several novel radiating elements were invented.
Dielectric Resonator Antennas (DRAs) are ceramic resonators that radiate energy into
space when excited appropriately. Besides applications in antennas, these ceramic
res-onators are used in microwave circuits in areas such as filter and combiner applications. Usually they would be encased in a casing to prevent energy lost through radiation when used as such devices. The figures of merit for these resonators are their Q factor and temperature stability. The Q factor can range from 20 to 50000. The relative dielectric constant (,) for commercially available dielectric resonators (DRs) can range up to about
an cr = 90. The temperature coefficients of resonant frequency (f) can range from about
-6 to 4 ppm/°C. The general characteristics of dielectric resonators were described very
comprehensively by D. Kajfez and P. Guillon [24].
In recent years, DRAs have enjoyed a strong following among antenna engineers. At QUALCOMM, the interests in such antennas are due to its prospect of shrinking down the
sizes of antennas for satellite phone operations and its potential in reducing the cost and
ease of manufacturing. DRAs are one of the most recent progresses in antenna technology, taking its place on par among the more common antennas, such as wire, microstrip, horn,
and reflector antennas. Perhaps, for the reason that it is such a recent development that
there is still much room for development but with very little published material for reference.
The review paper by Mongia and Bhartia [26] is an excellent paper that outlines the major characteristics of the DRA with respect to modes and their respective resonant fre-quencies. The cylindrical DRA is emphasized in their paper. The rectangular and spherical DRAs were also touched on briefly. It is a good place to start. Equations for the resonant frequency and bandwidth of the cylindrical DRA were provided based on empirical formu-las. The drawback is that it was not intended to contain information such as impedance models or radiation on finite ground plane. There was not enough space for them to write everything.
A few weeks after I decided to embark on this subject as my thesis topic, a publication
appeared in the June issue IEEE Magazine entitled, Recent Advances in Dielectric Resonator
Antenna Technology [27]. This is a paper that describes the current DRA technology being
pursued at Communications Research Center in Canada that is done in collaboration with
the Royal Military College of Canada. The technologies being pursued are novel DRA ele-ments for wide-band, compactness, circular polarization, high gain and active applications.
I suspect that they are pursuing DRA array technology. Their paper has an unusually
strong emphasis on couple slot feed, circular polarization (CP) DRA, and arrays.
DRA has the inherent merit of having no metallic loss. This merit is especially good for high frequency applications where conductor loss is proportional to the frequency. The
exploitation of this characteristic is in millimeter wave satellites where they can be used for
satellite to satellite communication. The earth atmosphere is opaque to the electromagnetic
spectrum at millimeter wave due to absorption by 02 and N2 molecules in the atmosphere.
This means that information transmitted from one satellite to another satellite via
mil-limeter wave will have increased security due to the impossibility to tap such signals from
earth.
Another advantage is that because it is usually operated at high permittivity, it allows the antenna to be shrunk in physical dimensions because the wavelength is reduced by
approximately a factor of . DRAs also offer easy coupling schemes to transmission lines
by simply varying the position of the feed points. And there is much room for flexibility in design to optimize for bandwidth. On the manufacturing side, the DRA can be easily tuned to its resonant frequency by using a tuning screw attached above the DRA. The large
degree of freedom means that design is difficult because a lot of variables interplay with each other. However, if the physics is well understood, it is possible to design the DRA to
operate at nearly any rational input impedance, thus eliminating the need of a matching
circuit. The complexity of the DRA can be exploited.
I will now give the outline of what is to come. In the later part of this chapter, I would show some of the salient features of the DRA. In the next chapter, I derived, using the magnetic model, the expressions for the resonance frequency for the cylindrical DRA with
emphasis on the HElls mode. The topic of radiation is discussed next. Its relation to the
multipole expansion of the field distribution is important because it is this relation that
determines the radiation pattern of the DRA. Also important is the discussion on finite
ground plane effects [35], [36], [37], [38], [51]. The equivalence principle formulation [14], [1]
will be used to explain the radiating mechanism. In chapter 4, an impedance model for the
DRA is introduced based on data collected at QUALCOMM and also experimental results
published in [39]. Chapter 5 presents the analysis for the resonant frequency and bandwidth
of the ring resonator. The ring resonator is important because it allows the bandwidth to
be tuned. Some DRA related inventions are also discussed.
1.2 Basic Characteristics
1.2.1 Physical Dimensions and Electrical Properties
Like most good things in life, DRAs can come in many forms of shapes and sizes. The most common shape of the DRA is the cylindrical DRA. This is shaped like a cylinder with its
radius, a, and height, h. It usually has an aspect ratio - the ratio of radius over height (a/h)
- of about 0.5 to 4. The DRA usually sits on top of a ground plane and is excited using
a probe or aperture. The radiation pattern and the feeding method depend on the mode
of interest. The DRA can resonate at many different modes. For the cylindrical DRA, the modes are analyzed and indexed in a similar manner as that of the dielectric waveguide. As
with the dielectric waveguide, the three spatial coordinates are the radius, p, the azimuthal
TI
X
y
P
Figure 1-1: Coordinate System.
1.2.2 Modes
Transverse modes are defined as modes with transverse E or H fields to the z axis. In waveguides, it is advantageous to solve Maxwell's equations by considering the transverse E
and transverse H separately. The axial vector gives all the information needed to calculate
the rest of the vector components. As with the dielectric waveguide, to satisfy the boundary
condition of continuity of tangential fields at the boundary of the dielectric and air, the
only transverse fields that can exist are the modes with no azimuthal variation such as
TEol0 , TEo011+, TMol0 , and TMo011+. All the other modes are hybrid modes just like the
dielectric waveguide [14]. Table 1.1 summarizes some of the major modes that can exist
in a cylindrical DRA. Note that for the cos variation, we could replace it with sin
k
or
a linear sum of both. This is a degeneracy as both the orthogonal modes with cos
0and
sin
0variations can both simultaneously exist in a DRA with the same frequency. General
]
treatment of modes in cavities and waveguides can be found in electromagnetic textbooks
[7]- [15].
Mode
Plane of Symmetry at z=O
Fields inside Resonator
Far Fields
TEo1a Magnetic Wall H = Jo(hr) cos (z)
E
Mag. dipoleE,=O0
TE0 11+6 Electric Wall H, = Jo(hr) cos (z) Mag. quadrupole
E,=O0
TMo0 6 Electric Wall
Ez
= Jo(hr) cos (/3z) Elec. dipoleH,=O
TMo0l+6 Magnetic Wall
Ez
= Jo(hr) cos (z) Elec. quadrupoleH,=
0
HE1 15 Electric Wall E = J1 (hr) cos (z) cos q5 Mag. dipole
H,-O
HE2 16 Electric Wall Ez = J2(hr) cos (3z) cos 2q Mag. quadrupole
EHl1 1 6 Magnetic Wall H = J1 (hr) cos (3z) cos qS Elec. dipole
E, O
EH21 Magnetic Wall Hz = J2(hr) cos (z) cos 20 Elec. quadrupole
E,-0
Table 1.1: Salient Features of Modes of a Cylindrical DR
1.2.3
Feeding structures
The general feeding mechanism for waveguides and cavities is described in the classic book by Collin [4], [5] and also by Jackson [11]. These feeding structures are usually small electric or magnetic dipoles. The reason for why this is so is because the field distribution for the low order modes when expressed as an expansion in multipole terms would contain strong low order terms such as electric dipole or magnetic dipoles terms. Therefore to couple the energy from the probe into the cavity, electric or magnetic dipole probes are used. To obtain magnetic dipoles, small circular current loops are usually employed. However, in practice, variants of these methods are used. For example, it is more typical to see the DRA being
excited by a short monopole antenna rather than a dipole. Also, a half-circular current loop
is more common in practice.
The apprehension of the appropriate feed mechanism can be obtained in the following way. Firstly, the natural fields in the cavity can be expanded in multipoles. Van Bladel [21], [22] showed that for modes of any shape of the DR are the non confined type. The dominant
is the electric dipole term followed by higher order electric and magnetic multipoles. For resonator shape that is axisymmetric, it can also support confined modes. For confined modes, the electric dipole term contributes dominantly.
Therefore, we can picture that embedded in the DRA are these tiny electric or magnetic dipoles. The exact choice is dependent on which mode we choose to excite. For example,
to excite the HE1 1, mode which radiates like a horizontal magnetic dipole, we can create
an aperture underneath that radiates a magnetic dipole through the surface of the aperture
as shown in Figure 1-2. This is called slot-coupled. We can also use a vertical monopole as shown in Figure 1-3
Coupling Aperture
-- _____________
Microstrip Feed Line
DRA
Grounded substrate
Monopole feed probe
-
Ground
Plane
Coaxial Cable
Figure 1-3: A DRA fed using a monopole.
1.2.4 Radiation Patterns
From the last section, we know that the fundamental modes of the DRAs radiate like magnetic or electric dipoles. This is because the field distributions in the cavity for the
low order modes support these terms. For radiation study, a natural approach to study
is to expand the radiated fields using the multipole expansion technique. In the multipole
expansion technique, any arbitrary radiation pattern is decomposed into a sum of dipole,
quadrupole and higher order multipole terms. Jackson [11] has a good treatment of this
subject in Chapter 16 of his book.
For low profile antennas operated at low order modes, the contribution from the higher order poles are usually weak. Generally, the smaller the radiating element is compared to the free space wavelength, the better this approximation is. H. A. Bethe [33] has applied this method to the study of radiation from a small aperture in a waveguide.
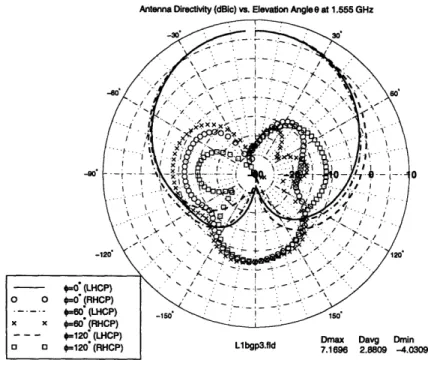
DRAs can also be used to produce circular polarization [29]. There are actually two
HEll, modes which are orthogonal. Some people prefer to call one of it as odd and the other
as even to distinguish between the two. To obtain CP from HE11s, each of the degenerate
mode must be excited at 900 phase difference. Figure 1-4 shows the radiation from a circular
DRA with dimensions of a=0.57 inch and h=0.425 inch with an
er= 45 for the elevation
cut when excited in this fashion. Throughout this thesis, in the polar radiation plots,
Dmax refers to the maximum directivity, Davg refers to the average directivity averaged
from -80
°<
< 800 for the major polarization direction (either Right Hand circular
polarized (RHCP) or Left Hand Circular Polarized (LHCP) ) for all 0 and Dmin refers to
the minimum directivity for the major polarization at 0 = 80
°.As a low profile antenna, the radiation from a DRA is sensitive to the ground plane size. This is discussed in Chapter 3 of this thesis. For finite ground plane sizes with large
Antenna Directivity (dBic) vs. Elevation Angle e at 1.555 GHz
Figure 1-4: Radiation Pattern as a function of elevation angle for a typical circular DRA
with the two modes excited in quadrature phase
diameter (greater than 1 A), geometrical theory of diffraction (GTD) can be used [38], [51]. For consumer applications, a smaller antenna size is desirable and therefore the ground plane is usually designed to be as small as possible. A small sized ground plane of less
than a quarter wavelength can be used with the DRA without significantly distorting the
radiation pattern.
1.3 Method of Analysis
There is no exact analytical solution to the Maxwell's equations for many of the complicated
structures of the dielectric resonators that are used as antennas. In view of this, to attempt
to gain some logical understanding, approximate models must be used to obtain answers in closed form. This is in accordance with the early developments of quantum theory. In the
beginning, when the radiation from the hydrogen atom was not understood, ad hoc methods
such as the Bohr planetary theory of the atom was used to predict the radiation spectra.
Of course, this cannot be correct for reasons of stability, because an electron moving in orbit would be accelerating and would thus radiate energy away and in the end collapse
into the nucleus. The rest is of course history. De Broglie proposed that those atoms were de Broglie waves, and given that they are waves, it was natural for an uncertainty principle
to be formulated and the need for a wave equation to describe the space time variation of
the wave. Thus, Bohr's theory led to new ideas that suggested the existence of the particle
wave duality. Perhaps using a model as ad hoc as it may be might lead to some insights
that were not captured from experience and intuition.
According to my research, the most popular models to analyze these DRAs are the mag-netic wall model, the transmission line model and numerical methods (Method of Moments [18] or Finite Elements[19], [20]). The magnetic wall model and the transmission line model are good for building physical insight. However, they are not as accurate as numerical
meth-ods. Numerical methods are the most accurate but they offer very little physical insight
and a good reliable finite element program may take as long as 6 hours to solve a problem
at a particular frequency. Thus, for anyone wishing to increase the rate of her design cycle,
it is usually good to start off with an analytical model and based on the analytic model
refine her design using numerical methods. For the remaining of the chapters, the magnetic wall model will be used to analyze these DRAs. The predicted results using the model will
then be corrected by analytical means if possible using perturbation theory or correction
factors. Design curves from numerical methods and reported experimental results will also be included.
1.4 Summary
In this chapter, I outlined some salient features of the DRA. Some reasons for using the DRA are its inherent merit of having no metallic loss, small physical size, easily tunable,
and the large degree of design freedom in choosing the parameters. The characteristics
of the major low order modes can be adequately approximated by keeping the low order
terms of the multipole expansion for the field distribution. The radiation pattern of the
DRA would ultimately depend on the field distribution inside the DRA. For example, for
the H 1ll mode, the fields inside the DRA can be approximated closely by a horizontal
magnetic dipole. Therefore the radiation pattern for that DRA at that particular mode will
be that of a horizontal magnetic dipole. Methods of feeding the DRA to excite the mode of interest using monopole probe and slot fed method are also discussed.
Chapter 2
Resonance and Bandwidth
2.1 Introduction
The formulation in terms of TE and TM modes in guided wave theory was motivated by the
observation that the complicated wave problem can be separated into two main problems
of finding the electric and magnetic fields transverse to the direction of propagation. When
these two quantities are found, one could obtain the other components by using Faraday's
Law and Ampere's Law as formulated in Maxwell's equations. The fields in a resonator
are standing wave fields and thus the problem can be solved by assuming that the waves
are guided waves propagating in +z and -z directions. To find the transverse components
the following equations called homogeneous Helmholtz equations are solved where z is the
direction of propagation:
[V2+ w2pe]Ez = 0
for transverse magnetic (TM) case and,
[V2 + w2pE]Hz = 0
for transverse electric (TE) case.
The other field components are given by Faraday's and Ampere's laws after doing some algebraic manipulation to solve for each vector components in terms of Ez and Hz. The final field expressions are given as:
E,
k _ [v. s-E + iwfV
- 8x Hz]
1 [s
H,
=
k2 _
[V, --H -
iwpV
x E]
where k = w2pe is the wave number and s is the transverse components. I am using the
same notation that was used by Kong [14]. In the case of cylindrical dielectric resonators,
the equations are expanded in cylindrical coordinates and substitution Hz = 0 for the TM
case into the above equations give:
Ep = k2 _ k2 [ p Ez (2.1)
1 1 (2.2)
Hp = k2
_ k
[iwE 'aEz] (2.3)H = k
2_k
[iwe
2a
Ez]
(2.4)
2.2 Formulation of the Cylindrical Dielectric Resonator
us-ing the Magnetic Wall Model
The physical dimensions and coordinate origin is as shown in figure 1-1 and 2-1. The
height of the resonator is L and the boundary condition at z=-L1 and Z=L2 is that of a
perfect conductor. For the HEll1 mode, Hz 0 so we will solve the problem for the TM
case. The field within the region 0 < z < L is,
E = J (kpp)cosq(Aeiz
+ Be
-iZ)
where p is the propagation constant in z direction. Knowing Ez we can find the other
field components by using equations (2.1) to (2.4). We get,
IL2
L2L
A
-L1
Figure 2-1: The DRA is placed at z=O and the boundary condition at z=-L1 and L2 is that
of a perfect conductor
(2.6)
(2.7)
E = I32)
[JI (kpp) sin (Aeiz - Be-iZ)]
iwe
H = p(k2 2) -[Ji(kpp) sin (AeiP + Be-iPZ)]
H
=
k2
-[(kpJo(kp)
-
Jl(kpp))cos (AeiZ +Be-iIZ)]
V - p2 P (2.8)
where
k2 = 2
t
= k + 2 (2.9)kp and P3
are the propagation constants in p and z respectively. The radial propagation
constant k can be obtained by using the condition that H is zero at p = a. This is due to the perfect magnetic conductor assumption at the curved surface. This condition yields
kpaJo(kpa)
=
J(kpa)
This gives kpa = 0, 1.85, 5.3, ....
Figure 2-1 shows the segmentation of the region around the DRA. Let region 1 be the
region where -L1 < z < O0. The Ez field here is,
Ezl = J (kpp) cos b(CeQ z + De- al z)
L
- -
-Similarly, the fields in region -L1 < z < 0 are:
a, 1 Z)
Ep=i
k2
-a
[kpJo(kpp)
-
Jl(kpp)] cos O(Ce
lz - De
a - a')
(2.10)
E1
=p(k
_ Jl(kpp) sin
q(CelZ
- DeZ)
(2.11)
iwo
Hpl
p(k
2_
a2
)J
l(k
pp) sin b(Ce
az + De
- alZ)
(2.12)
iwo 1
=
+
-
c2
[(kpJo(kpp)-J(kpp))(Celz + De-al) cos]
(2.13)
where al is the wave propagation constant in region 1.
The field E¢,1 must vanish at z = -L1 because of the conducting wall. This results in
D
= Ce
- 2alL1
Therefore the above equations can be rewritten in terms of one unknown, C, as
2Cae-aL1 1
Ep1=
k
2-a
[kpJo(kpp)
-
Ji(kp)]cossinh(al(z
+ L1))
(2.14)
--2Cale-aL1
E0
1=
2(k - 2)Jl(kpp)sinqksinh(a(z
+ L1))
(2.15)
Ez
= 2CJ1(kpp) cosqcosh (a(z + L
1))
(2.16)
2Ce-a
iweo
Hp = 2Cep(k
-aL)
J (kpp) sin k cosh (a (z + L1))
(2.17)
2CiwEoe -L1 1
Ho1
C=
i°e
[kpJ(kpp)- -Jl(kpp)]cosh (al(z + L)) cosq$
(2.18)
In an analogous manner, by making the substitution -L
1= L
2+ L, we obtain the
following fields for region 2:
2Fa2 ea2(L2±L) 1
Ep2 = k2 _2
[kpJo(kp)
-J(kpp)]
cosq sinh
(a2(z -L
2-L))
(2.19)
-2Fa2 e2 (L2+
L)E02
=
p(k2 _a2)
J(kpp) sinq0sinh
(a2(z - L
2-
L))
(2.20)
Ez2 =
2FJ
1(kpp)
cos0
cosh (a2(z - L2 -L))
(2.21)H
2Fa
2e
(L2+ )iWJ (kpp) sin 4cosh (a
2(z -
L2 -L))
(2.22)
2kpe(
a1
L+
)(kpp)]
[J(kp)-
cosh (2()
F k2 [J
(kp)
- J(kp)] cosh (a2(z - L2 - L)) cosq(2.23)
where
a2 = k2 k22 (2.24)
Next, we use the boundary condition at z=0. The boundary condition is that the
tangential fields must be continuous. This lead to the following condition,
E01
-if(Aeifz - Be-ifZ)
Hp(Ae + Be
E(AePz
+ Be-ifz)
=
E2
=
-2Cale
- a lL1
sinh
(al (z +
L1))
= Hp2
= 2coCe-, Li cosh
(al
(z + L1))Dividing the equation 2.26 by equation 2.28, we get
(Aeiz
-
Be-if z)
ip(Aeiz + Beifz)
= alE, tanh (al (z + L1))
(2.29)Now, we must remember to evaluate z at 0. Doing so we get from equation 2.29
(A - B)
if] (A -- B)
lEr tanh (ilL1)
(A + B)
(2.30)The boundary condition at z=L is the same as at z=0. Thus we just need to substitute
the variable L1 with -L - L2 and evaluate z at L. Doing so we get,
(Aei#L - Be-iPL)
iP
(Ae
+
Be-ifL)
= a2,tanh
(-a 2L2)
(2.31)Now, for a perfect standing wave, A and B must have the same amplitude. Thus
B
- = e
iA
With this, we can evaluate the left hand side terms
and
(2.25) (2.26)
(2.27) (2.28)
A-B
= -i tan 0/2
A+B
and
Aei3L - Be-i3LAe
i tan (L - 0/2)
Aei
L+ Be-i3
L Let02
-= arctan( _
tanh(aL1i))
(2.32)
2 2 l 02 -a2Er= arctan ( 13 tanh (-a
2L
2))
(2.33)
2 P
For an isolated DRA in free space, we let L1 and L2 approach oo. Then the above
conditions reduce to,
2=
-
= arctan(
)
(2.34)
02 _ 2 Er
= arctan (
)
(2.35)
2
In free space with e1 1, 2 = 1, and al = a2 we have,
O1 02 a6r
L =- + - = 2 arctan (
(2.36)
2 2
where a2 is given by equation 2.24 and P is given by equation 2.9, both which are the
z-propagation constants in the respective dielectric permitivities.
Now, we have the resonant frequencies for the HEll5 by applying equation 2.36.
2.2.1
Summary and physical interpretation
We attempted to solve the problem of an isolated DR in free space by using a simplified model. In this model, we assumed that the curved surface of the DR is a perfect magnetic conductor. When an EM wave propagates from region of high permittivity to low
What is the motivation of this concept?
Now, we know that the intrinsic impedance is inversely proportional to /.
Thus, in
region of high permittivity, the impedance is very low. In transmission line theory, the
reflection coefficient is given by RL- . For a wave traveling from high to low region of
permittivity, Ro is much smaller than RL. Thus, the reflection coefficient approaches 1.
This is an open circuit thus we can assume it to be a perfect magnetic conductor. On the
other hand, for a wave traveling from region of low permittivity to high permittivity, R is
much larger than RL. Thus the reflection coefficient approaches -1. This is a short circuit
in transmission line, or a perfect electric conductor.
Therefore with a curved surface as a perfect magnetic conductor and the ends as perfect
electric conductor at some distance away from the resonator, we derived the dispersion
relations. This allows us to find the resonant frequency of the DR.
Mongia and Bartha [26] have an empirical expression for the calculating the resonant frequency for the HEM116 mode. Table 2.1 compares the values obtained using the method developed in this section with their formula for a cylindrical dielectric resonator in freespace.
Table 2.1: Comparison of Resonant Frequency for HEM1 1 6 mode using empirical formula
by Mongia and the Magnetic wall model developed in this section.
Ier radius (in) height (in) Mongia (GHz) Magnetic Wall (GHz) Error
45
0.57
0.300
1.92
1.56
19
45
0.57
0.425
1.58
1.30
18
45
0.57
0.800
1.22
1.05
14
45
0.57
1.500
1.03
0.95
8
45
0.40
0.300
2.25
1.58
18
30
0.57
0.425
1.92
1.58
18
The error between the magnetic wall model and the formula obtained by Mongia is large. The reason is because the magnetic wall model is not a perfect model. The dielectric
resonator is not a perfect magnetic conductor, but fields actually penetrate across the curved
surface of the resonator.
Figure 2-2 shows the plots of the electric field vector for the HE11l mode. The top
figure is the electric field plot on the side of the resonator. The lower figure is the cut along
the equatorial plane. From both sketches, we can deduce that the dominant multipole
expansion term should be the horizontal magnetic dipole term.
E
H
II I IIv
I
I!
I I IIIFigure 2-2: Top: The Electric Field vector seen from a side view cut for the HE1ll mode.
Bottom: The Magnetic field vector seen from a cut along the equatorial plane for the HEl11
mode.
2.2.2
Perturbation Correction to the Magnetic Wall Model
The previous model gave a close answer but we can get a more accurate result by including a perturbation model. We know that the magnetic field does penetrate through the surface of the DR because it is not a perfect magnetic conductor. So let's move the perfect magnetic conductor out to a radius distance of oo. What is the new resonant frequency? We will solve this using the perturbation model.
From cavity theory, when an outward perturbation is made at a place of large magnetic field, the resonant frequency is lowered; if made at a place of large electric field, the resonant
frequency is raised. The opposite effect occurs for an inward perturbation [14].
Let us collect our results so far, in region 0 < z < L which I will label as region 6 using
equations 2.5 to 2.8 after substituting the appropriate constants for A and B,
E06
(2.37) (2.38)
= B° [kpJo(kpp)
-
Jl(kpp)] cos sin (z - 0)
iw= o p 2
01
Ez
6=
J1(kpp)coskcos(z-
-2)
Hp
6=
-EoJ1
c(kpp)sin cos (,z -
)
P 1 1
H0
=
--
,Eo[(kpJo(kp)-- .
(kpp))cos
Pcos(3z-
-)]
2~~~~ (2.39) (2.40) (2.41) where -iweo
-Eo
2
)
(k2 - P2)Now, let us break the region into 6 different regions as shown in the Figure 2-3. The region with the DR is region 6, and each corresponding region's fields will be subscripted with the region number. To use the perturbation model, we must first calculate all the fields in each region because we need to eventually calculate the energy.
i
5
3 :
i2
4
Figure 2-3: Region around and at the DRA is separated into 6 regions
For region -L1 < z < 0, using results from previous section, we can immediately write
down the fields ensuring continuity at boundary as,
Eo=
3 sin -1
1
=
sin
2o [kpJo(kpp) - J (kpp)] cos qsinh (al(z + L1))iwo sinhClL1
P
(2.42) I i 1 i i i iEo/3 sink
E01 =
s
Jl(kpp) sin 0 sinh (al(z + L1))
(2.43)
piweo sinhaIL 1 COs
Ezl
=cosh
Jl(kpp) cos cosh (al(z + L1))
(2.44)
cosh a, L1
1 cos
'-Hp
= -ErEO-pcosha L
h 2 J1 (kpp) sin b cosh (al (z + L1)) (2.45) 1cos
(246H,1 = -ErEoc
coshalL
2[kpJo(kpp)- -Jl(kpp)]coscosh(al(z
+ L1))
(2.46)
1
p
and similarly for region L < z < L2,
Esin (L - ~)
Ep2
=
Eo72ie
iwco sinh (-a[kJo (kp)
-
Jl(kpp)] cos
sinh
(a
2(z - L
2- L)2.47)
2L2) p
E
0sin (3L - -)
2
iwEo
sin( 2 J(kpp)
sin4
sinh (a2(z - L2- L)) (2.48)p iwEo
sinh (-a
2L
2)
cos (fL -
-)
E.z2 =2
cosh(-a
JI(kpp)
cos cosh (a2(z - L
2- L))
(2.49)
2
L
2)
=rEo
cos (L - )Hp2
(3L 2) J (kpp) sin bcosh (a2(z - L
2-
L))
(2.50)
p
cosh
(-a
2L
2)
co (L -
)
H2
-ErEo
-=(-
2L)[kp J(kpp)
-
J (kpp)] cos
q
cosh (a2(z - L
2- L))(2.51)
The fields in regions 3, 4, and 5 are now selected such that the solutions are of the forms of modified Hankel functions which are monotonically decaying with increasing p. Thus,
the fields in region 3, 4 and 5 are: In region 3:
E03 =
-Eo
.sin(
)JK(kpa)
(kp2p)
sin
0
sinh
(al(z + L))
(2.52)
iwEop sinh (alL1)Kl (kp2a)E 3 = COS( K1
(kp2p)
cos cosh(a
( + L1)) (2.53)cosh (alL1 )Kl(kp
2a)
co - J (k a)
Hp3 =
-erEo
co
2p
Kl(kp2p) sinqbcosh (al(z + L1))
(2.54)
p cosh (alL )K(kp2 a)
In region 4:
E04 = -Eo la J( (kpa) sin (2.55)
Ez4
=
( )
K (kp2p)
cos cos (z -
1
(2.56)K1(Ikp2a) 2
Hp4 =
-EEO
J(ka)
Ki(kp2p) sin 4 cos (z - 1) (2.57)pK1
(kp2a) 2In region 5:
E05 = -E0
if3
sin(L - )J(kpa)
K1(kp2p)
sin0
sinh(
2(z
- L2 -L))
(2.58)
wEo
psinh (-a
2L
2)Ki (kp2a)
cos (L
-
B-)J(k a)
Ez
5 =cos
(L-
)J(kpa)
Kl(kp2p)
cos cosh (a2(Z - L2 -
L))
(2.59)
cosh (-a2L2)K (kp2a)
Hp5 = EE cos
(
2(ka)
K(kp2p) sin qcosh (a2(z - L2- L)) (2.60)p
cosh (- a2L2)Ki (kp2a)
where
k2 = 2 _ k2
Now, we have all the field expressions from region 1 to 6. We can proceed to apply perturbation theory to the problem. We can use the expression given in [14]:
AWm- AWe
w = o(l
Wm- We
)(2.61)
where wo is the original frequency obtained using the Magnetic Wall model from the
previous section. lAWm and AWe are just the energies in regions 3, 4, and 5.
Written in a different form,
Wm3 + Wm4 + Wm5 - We3 - We4 - We5)
W( + Wm1 2+ Wm6 + Wel + We2 + We6
where
Wmi =
J
fvidV(plHo
)(2.63)
Wei =
Jvi
dV(ElEo12) (2.64)where Eo and Ho are the fields in the region where the fields in region i. Again, we compare the results to the empirical formulas obtained by Mongia. The values are shown
in the table below.
Table 2.2: Comparison of Resonant Frequency for HEM1 1
l
mode for a cylindrical resonatorin free space using empirical formula by Mongia and the magnetic wall model with the
perturbation correction (Perturbation).
IEr radius (in) height (in) Mongia (GHz) Perturbation (GHz) Error
45
0.57
0.3
1.92
1.90
1.1
45
0.57
0.425
1.58
1.61
1.6
45
0.57
0.8
1.22
1.27
4.1
45
0.57
1.5
1.03
1.09
5.8
45
0.4
0.3
2.25
2.27
0.9
30
0.57
0.425
1.92
1.95
1.6
because the magnetic field does penetrates across the walls of the DR. Thus, we perturbed our solution by moving the magnetic walls outwards. According to perturbation theory, depending on whether there is an increase in magnetic or electric energy, the resonant frequency would shift either up or down.
The physical interpretation of the perturbation result is in order. This is how I
under-stand it qualitatively. First, our unperturbed system is at resonance. At resonance, the
time averaged electric and magnetic field energies are equal. If you perturbed the system such that you take away from it equal quantities of time averaged electric and magnetic
field energies, then the system is still at resonance because those two quantities are still
equal.
Next, perturb the system again so that you take away more time averaged magnetic power than the time averaged electric power . The system is now not in balance. There is more time averaged electric field energy than the time averaged magnetic field energy.
Then, the resonant frequency must change to a new frequency such that the total time
averaged electric and magnetic field energy would be equal again. Here is another look at a thought experiment.
Imagine that we have a capacitor. At DC, the electric fields would be non time varying and the field arrows would point from the positive plate to the negative plate as shown in figure 2-4. The energy stored is purely electrical. The polarity of the terminals is now switched. If we change it slowly, the fields would point downwards when the polarity is switched - always pointing from the more positively charged plate to the negatively charged plate. Now, let us change the polarity of the plates at a faster rate. As we increase this
frequency, magnetic fields begin to appear in the space between the plates. This is due to
Ampere's Law. A time varying electric field produces magnetic field. Now, we have some magnetic energy. So, what began as a capacitor is now behaving more like an inductor.
Figure 2-4: Capacitor electric field lines at DC.
Let us increase the rate of change even faster. Now, more and more magnetic energy
builds up. There would be an interplay between Faraday's law and Ampere's law. The time
varying magnetic field would create electric field, and the time varying electric field would create a time varying magnetic field. Soon, the amount of time averaged electrical energy and magnetic energy within the space between the two plates would be equal. Our system
would then be at resonance. And at this point, we can place ,at locations where the fields
are null, conductors so that our original capacitor now becomes a cavity.
Perturb the system now by taking away some magnetic energy. After perturbation, there is more electrical energy than there is magnetic energy. To keep both the energy in balance again, we must increase the frequency to generate more magnetic field. This is
what is described by the theory.
In the same way, we could describe the thought experiment with an inductor in which
case, the result would be the opposite.
2.3 A note on fine tuning
Any derived empirical formula is not expected to be exactly precise. The derived formula
errors and many other sources. The antenna engineer must therefore understand the
un-derlying physics to know which parameter is to be reduced or increased to fine tune the
resonant frequency of the antenna.
Even if the antenna engineers fully understand the underlying physics, as the antenna
gets manufactured, manufacturing tolerances on design parameters will change the resonant frequency. Examples of such manufacturing tolerances are the radome thickness, and the
measurement tolerances for cutting and shaping the antennas.
One must therefore perform a sensitivity and manufacturing tolerance study. I like to
present here a method that can be used to solve this problem. The problem to solve is
the problem of fine tuning the resonant frequency of the cylindrical DRA and to determine
its manufacturing tolerances. It is based on a Taylor Series approximation. The idea is
that manufacturing tolerances are expected to be small changes in the design parameters. Therefore a first order Taylor Series approximation about the difference between the man-ufacturing sample and the ideal sample should be adequate to describe its effect on the resonant frequency.
Let the resonant frequency be a function of the radius a, height L and permittivity er
or f(a,L,Er).
Then, the differential change in the resonant frequency is,
df =
f
da
+
f
db
+
f
d
Making a 1st order Taylor Series approximation,
Afa+f
Ab
Of A
Af = af
Aa + -afAb
+ af
Ar
(2.65)
The goal now is to determine the value of the partial derivatives given by the above equation. At simulation stage, this can be easily done. For example, set Ab = Ae, = 0.
Then vary a by a small amount, Aa. Run the simulation and obtain Af from the simulation.
The value of -9 is then given by Af/Aa. The process can be repeated for the other partial
derivatives. The end result is that the above equation is now a design equation. It tells the designer exactly how much he or she needs to vary the parameters to further fine tune the resonant frequency.
be held constant. This does not present any problem in my formulation. Each of the
change in the parameter can be measured. The change in the resonant frequency can
also be measured. From one manufacturing sample, one would be able to rewrite the
above equation as an equation in n number of unknowns for n number of parameters that
are subjected to manufacturing tolerances. Then one needs n manufacturing samples to
produce n independent equations. The set of n equations in n unknowns are a set of linear
equations and they can be conveniently solved using linear algebra techniques where the set
of equations are expressed in the form Ax = b. If there are more samples than the number
of parameters, then this becomes an over determined system in which the solution can be
obtained by using least squares. The linear algebraic method solution to least squares is also
very straightforward. It is given by ATAx = ATb. The method can of course be generalized
to any arbitrary number of parameters.
This method is so general that it does not even require any understanding of the
un-derlying physics beyond the functional dependence of the resonant frequency. It is also applicable to all forms of manufacturing processes beyond antenna engineering. I believe that this is the power of a Taylor Series approximation. Newton was able to come up with
F = ma - an equation still used today despite lacking a true picture of the actual structure
of space-time. His famous equation was so accurate for describing macroscopic motions because it is a first order approximation in v/c where v is velocity of some object and c is the speed of light.
2.4 Degeneracy and its similarities to the Zeeman effect
-Symmetry
From the field expressions in the DRA, we had a choice of replacing the azimuthal term
cos with sin and vice versa or the linear sum of both and the equations would still
be a solution to Maxwell's equation. Thus, at the same frequency, there are actually two
orthogonal modes that exist for the HE
11l mode. What is the source of this degeneracy?
Degeneracy in atomic radiation is a very important subject in Quantum Mechanics.
Many of the physics of degeneracy between antenna radiation and atomic radiation share
the same explanations. I like to discuss this degeneracy in a more broader setting to
understanding of the same phenomena from other areas (Quantum Mechanics).
In the hydrogen atom, which consist of just a proton and an electron, degeneracy is
caused by the symmetry of the system. The Schroedinger equation, which is also a statement of conservation of energy, would contain a term involving the potential energy of the electron which is a function of the distance away from the nucleus, r. The other spatial variables, the
polar angle 0 and the azimuthal angle do not come into play at first order. The quantum
states of the different angular momentum of the electron are orthogonal states. However,
they all have the same energy. So we identify the system as having degeneracy because the energy levels of the different electrons are all at the same level.
Symmetry is also the reason for the existence of degenerate modes in the cylindrical
DRA. The DRA is symmetric in the azimuthal direction. There isn't any azimuthal angle
that is preferred. We could place our probe at any azimuthal angle and all the results would
still be the same had we placed the probe at some other azimuthal angle. But once we have
decided on the azimuthal angle to place our first probe, that would destroy the symmetry
and the other degenerate mode would have to be excited by a probe placed at 900 away
from the probe. This would then be the only other orthogonal mode at the same frequency.
The detection of degenerate energies and its related experiment in Quantum Physics
comes under the name of the Zeeman effect. In the Zeeman effect, magnetic fields are applied
that effectively breaks the symmetry of the system. The application of the magnetic field
interacts with the angular momentum of the electron. Depending on the quantum number of
the angular momentum, electrons at different angular momentum states which all previously
share the same energy will now have different energy levels. The degeneracy is broken. With the degeneracy broken, two or more slightly different frequencies are radiated and it can
be measured. Circular polarized radiation can be observed in Zeeman's experiment. The
interested reader can read more in [2].
We can do an analogy of the Zeeman effect on the DRA. In Chapter 5, I will show