Modelling and flexible predictive control of building space-heating demand in district heating systems
Texte intégral
Figure



Documents relatifs
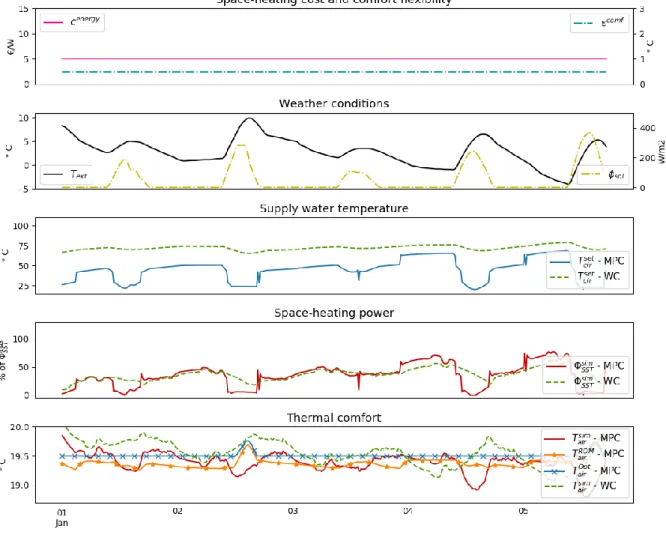
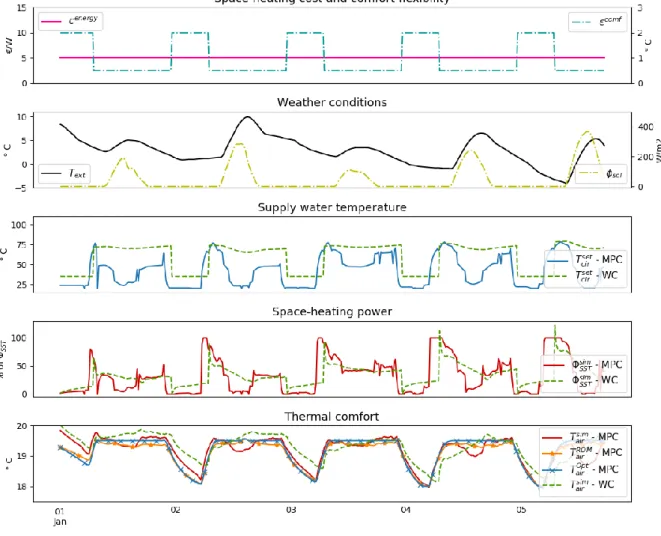
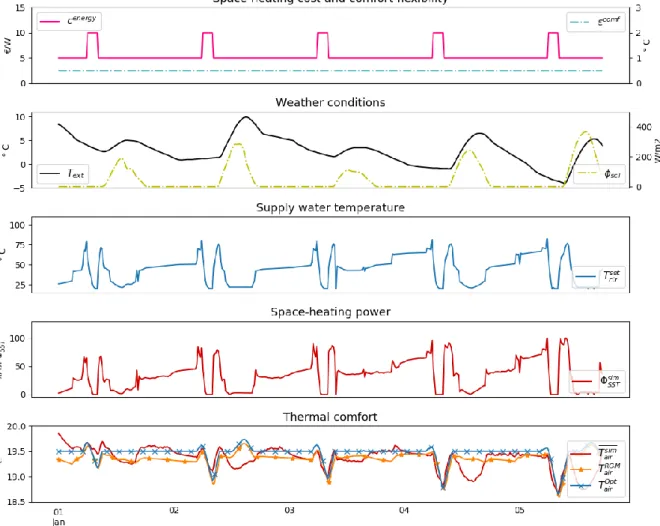
If we look at the thermal comfort, it is clear that the two predictive controllers give very interesting results because the in- door operative temperature is maintained in the
Private Membership Query using PBR. This protocol essentially follows the same prin- ciple as the one which combines PIR and a Bloom filter. Again k PBR invocations are required
Celui qui se prévaut d'un contrat de travail doit apporter la preuve de 11nexac- titude de la qualification de contrat d'entreprise par l'apport d'éléments
Differences between direct and reversed polarity treatment administration indicated that FEAST is clearly initiating seizure activity in the frontal region (right 4 left).
In this study, data collected on the passive seismic network have been used to further understand the reservoir by: 1) locating hypocenters to identify active faults / fractures in
Unite´ de recherche INRIA Lorraine, Technoˆpole de Nancy-Brabois, Campus scientifique, 615 rue de Jardin Botanique, BP 101, 54600 VILLERS LE`S NANCY Unite´ de recherche INRIA
The spectacular growth of Río Bec style construction in Group C since Makan 2, its parallel evolution with Group B during the Terminal Classic period and their spatial proximity
مﺎﳋا ﻲﻠﶈا ﺞﺗﺎﻨﻟا ﰲ عﺎﻄﻘﻟا ﺔﳘﺎﺴﻣ ﺎﻣأ 8 (PIB ) ﺎﲟ ﺔﻴﺣﺎﻴﺴﻟا تاداﺮﻳﻹا ﰲ ةدﺎﻳﺰﻟا رﻮﻄﺗ لﺪﻌﲟ ﺖﻧﺎﻜﻓ برﺎﻘﻳ 7 ﱃإ 9 ﺔﻨﺴﺑ ﺔﻧرﺎﻘﻣ فﺎﻌﺿأ تاﺮﻣ 2007 عﺎﻄﻗ ﺎﻫﺮﻓﻮﻳ ﱵﻟا
