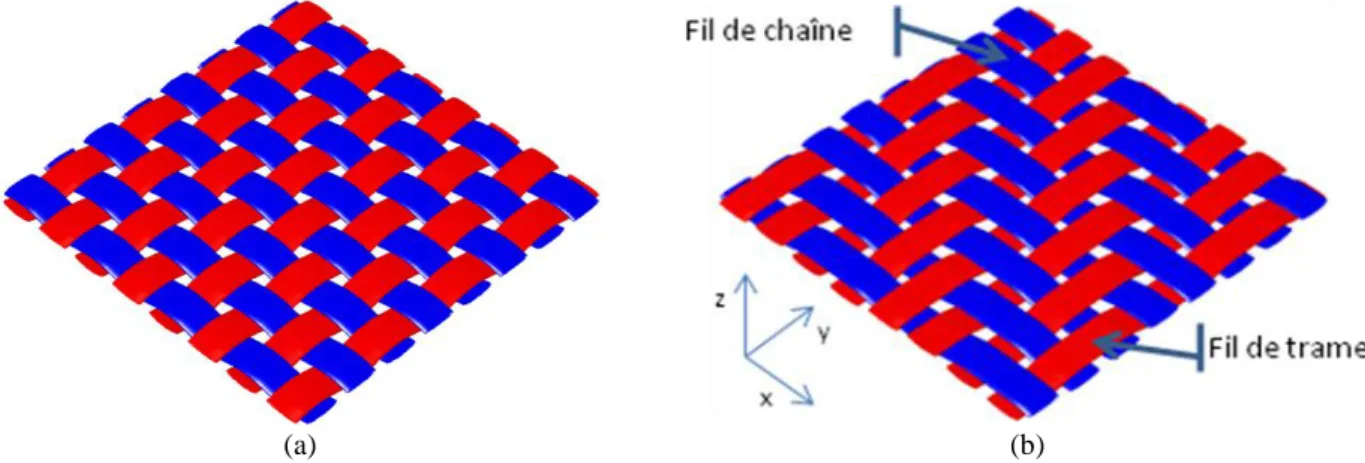
Modélisation des propriétés mécaniques de tubes composites tressés SiCf/SiC
Texte intégral
Figure

Documents relatifs
L’écrouissage isotrope a été choisi pour décrire le comportement des matériaux mais les essais de traction ne sont pas suffisants pour être sûrs du type
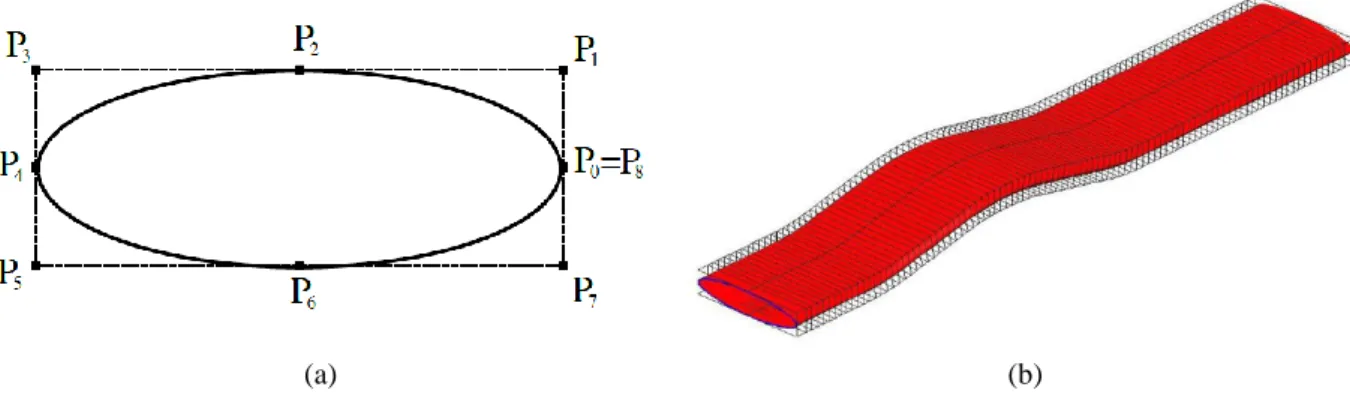
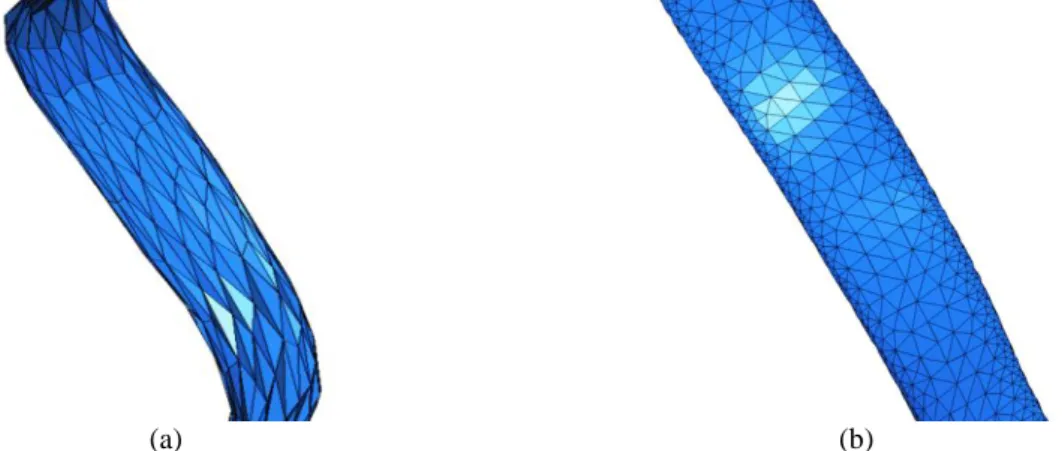
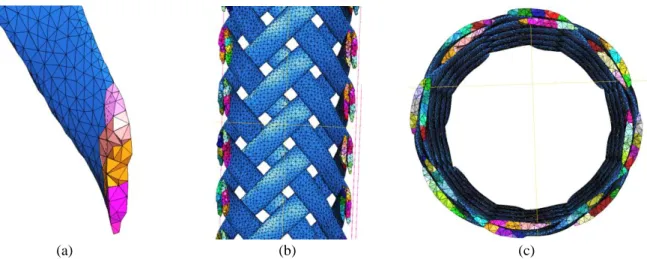
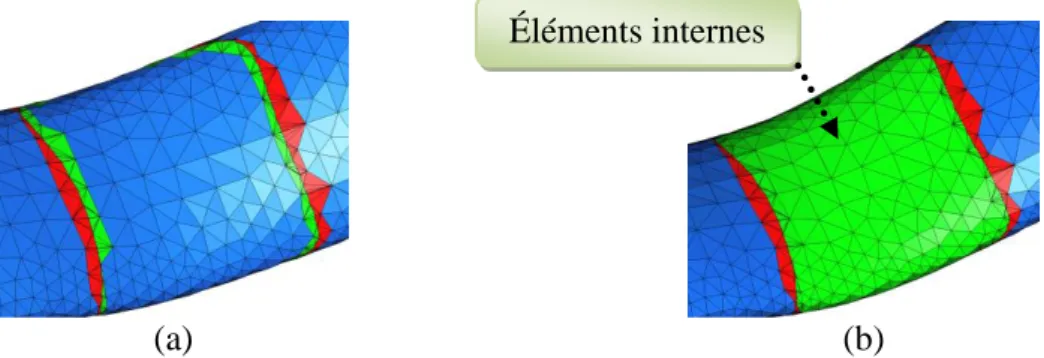
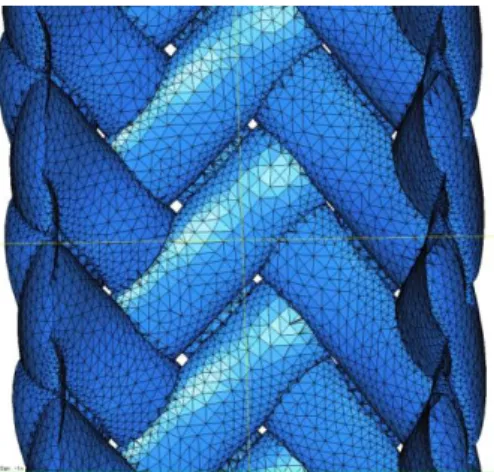
Une méthode de simulation par éléments finis est proposée afin de déterminer la configuration initiale a priori inconnue des ces structures tressées, et d’évaluer les contraintes
Dans un matériau monophasé, le couplage intrinsèque entre l’état électrique et l’état magnétique est défini comme l’effet magnéto-électrique.. Effet intrinsèque
Les (( lois d'évolution » que notre homme cherche à établir, ce sont (dans notre terminologie moderne) les lois qui régissent les réactions nucléaires, c'est-à-dire
Si la performance du cours de l’action Michelin est supérieure de 15 points ou plus à l’évolution de l’indice Stoxx Europe 600, la totalité du critère sera atteint,
La différence symétrique qui contient tous les éléments de l’ensemble A et tous les éléments de B qui ne sont pas à la fois élément de l’ensemble A et élément de l’ensemble
In the full field method part, we introduce the notion of Representative Volume Element (RVE) and recall the basic principle of effective properties computation of a composite
De plus, certaines fonctions sont si étroitement liées aux données (en fait, elle peuvent être les données dans le cas d'une description virtuelle – voir la section 3)
