MINISTRE DE L’ENSEIGNEMENT SUPERIEUR ET DE LA RECHERCHE
SCIENTIFIQUE
Université de Jijel
Faculté des Sciences et de la Technologie
Département d’automatique
MEMOIRE DE FIN D’ETUDES EN VUE DE L’OBTENTION DU
DIPLÔME DE MASTER EN AUTOMATIQUE
Option : Automatique & informatique industrielle
Dirigé par : Réalisé par :
pr.Hamid BOUBERTAKH Zahira SID
Moufida ZAABAT
Année Universitaire : 2019/2020
Commande PID floue adaptative
classe des systèmes non linéaire
REMERCIEMENT
Nous tenons a remercier Dieu tout puissant qui nous a accordé la chance de vivre ce jour pour voir le fruit de nos études et passer les meilleurs moments de cette joie ; celle du succès avec nos
famille qui nous ont porté toujours au chaud de leurs cœurs, et qui ont toujours cru en nous, et nous les en remerciant infiniment.
A nos parents,
frères et sœurs, à tous ceux qui nous ont accompagnés tout au long de ce parcours,
Nos remerciements vont à notre encadreur,monsieur :Hamid Boubertakh
Nous sommes Très Honorées d'avoir eu l'occasion d'être dirigée par vous. Nous vous remercions pour la gentillesse et la spontanéité avec lesquelles vous avez bien voulu diriger ce travail. Nous
avons eu le grand plaisir de travailler sous votre direction. Aux membres de jury:
C'est pour nous un grand honneur de vous voir membre dans notre jury. Nous vous sommes très reconnaissantes de la spontanéité et de L’amabilité avec lesquelles vous avez accepté de juger
notre travail. Veuillez trouver, le témoignage de notre grande reconnaissance et de notre profond respect.
Liste des figures
Figure 1.1 : Régulateur PID de type série………...3
Figure 1.2 : Régulateur PID type parallè…...3
Figure 1.3 : Régulateur PID type mixte……….………4
Figure 1.4 : Fonction triangulaire……….………..7
Figure 1.5 : Fonction d’appartenance trapézoïdale……….…………...8
Figure 1.6 : Fonction d’appartenance Gaussienne……….8
Figure 1.7 : Fonction d’appartenance sigmoïdale………..9
Figure 1.8 : La structure de système flou……….10
Figure 2.1 :Fonctions d'appartenance des systèmes flous pour l’entrée ………….21
Figure 2.2 : Fonctions d'appartenance des systèmes flous pour l’entrée ∫ …….. ……….….21
Figure 2.3 : Fonctions d'appartenance des systèmes flous pour l’entrée ……….….22
Figure 2.4 : Position angulaire , trajectoire désirée ………..22
Figure 2.5 : Vitesse angulaire ̇ , dérivée de la trajectoire désirée ̇ ……….23
Figure 2.6 : Evolution des paramètres de la commande PI...………..23
Figure 2.7 : . Réponses du système (trait continu), trajectoires de référence (trait discontinu).………..……….…24
Figure 2.8 : Dérivée de la sortie du systéme (trait continu), dérivée de la trajectoire de référence ̇ (trait discontinu)………..….…25
Figure 2.9 : Signal de commande u(t)……….….26
Figure 2.10 : Réponses du système (trait continu), trajectoires de référence (trait discontinu)……….…26
Figure 2.11: Dérivée de la sortie du système (trait continu), dérivée de la trajectoire de référence ̇ (trait discontinu)………...27
Quoi que de plus que de pouvoir partager les meilleurs moments de sa vie avec
les êtres qu’on aime.
Arrivé au terme de mes études, j’ai le grand plaisir de dédier ce modeste travail :
A ma très chère mère, qui me donne toujours l’espoir de vivre et qui n’a jamais
cessé de prier pour moi.
A mon très cher père, pour ses encouragements, son soutien, surtout pour son
amour et son sacrifice afin que rien n’entrave le déroulement de mes études.
A toute ma grande famille
T
ABLE DES MATIERES
Introduction générale………...1
Chapitre 1 Commande PID adaptative et système fous 1.1. Introduction ………...2
1.2. Différentes structures de régulateur PID ………...…...2
1.3. Domaine d'application et limites du régulateur PID………..4
1.4. Les avantages et les inconvénients du régulateur PID ………...…5
1.5. Commande PID adaptative des systèmes non linéaires…………...…….…...5
1.6. Système floue ………...6
1.6.1. Logique flou………..…6
1.6.2. Définition de la logique floue ………...6
1.6.3. Principe de logique floue ………...6
1.7. Fonction d’appartenance………...7
1.8. Les opérateurs flous ………...9
1.9.La structeure de système flou………..9
1.9.1. Fuzzification ………...10
1.9.2. Base de règles floues ……….……....10
1.9.3. Défuzzificateur ………...………...10
1.9.4. Approximation floue ………...11
1.10. Conclusion……….……...12
Chapitre 2
2.1. Introduction………...13
2.2. Position du problème………13
2.3. Première approche de commande PID floue adaptative………...14
2.3.1. Conception de la première approche de commande PID floue adaptative... ………...………...…14
2.3.2. Analyse de la stabilité ………...….17
2.3.3. Résultats de simulation ………...…20
1
La commande PID classique qui remonte aux années quarante est jusqu’à présent la technique de commande la plus utilisée dans l'industrie, et ce malgré le succès énorme sur le plan théoriques des nouvelles approches de commande avancées [1-17]. Cette hésitation des industriels à adopter la commande avancée est due principalement à des raisons économiques. En outre, la commande classique permet souvent de présenter des performances acceptables pour une large gamme de systèmes. De plus, elle offre certains avantages, à savoir, sa structure simple et universelle, sa familiarité aux opérateurs, sa facilité de mise en oeuvre et son coût faible.
La synthèse de la commande PID classique consiste à faire un choix appropriée de trois gains réglables permettant de remplir un cahier de charge des performances désirées. Afin d’assurer un fonctionnement optimal de la commande PID, de nombreuses techniques ont été proposées dans la littérature pour le réglage de ses paramètres à savoir, le gain proportionnel, le gain intégral et le gain dérivé. Parmi elles, on peut citer les méthodes empiriques tel que la méthode de Ziegler-Nichols [18, 19], les méthodes fréquentielles [19], les méthodes stochastiques [20-25]. Les méthodes de réglage donnent des valeurs constantes des gains de la commande PID qui assure un fonctionnement quasi-optimal dans des conditions nominales du système.
Malheureusement, le contrôleur conçu ainsi ne peut pas assuré de bonnes performances quand le système est trop perturbé, présente une dynamique inconnue, où ces paramètres changent avec le temps. Pour pallier à ce problème, la commande PID adaptative [26-40] est recommandée. Cette dernière cumule les avantages de la commande PID classique et la commande adaptative.
Les travaux de notre mémoire de Master II s’inscrivent dans ce contexte. On se propose d’utiliser des schémas de commande PID adaptative est les validées sur des systèmes non linéaires présentant des incertitudes des modèles des systèmes et des perturbations.
2
1.1. Introduction :
Le correcteur PID (à actions proportionnelle(P), intégrale(I) et dérivée(D)) est le
correcteur le plus présent dans l’industrie. Ce correcteur présente l’immense avantage de ne pas nécessiter de modélisation dynamique du processus, en particulier l’utilisation des techniques de la commande adaptative dans la commande PID classique a donné de nouvelles orientation a l’utilisation des contrôleurs PID dans diverse classe des systèmes [41 42 43].
Dans ce premier chapitre, nous passons en revue les différentes structures de régulateur PID classique, les domaines d'application et les limitations de ce régulateur ensuite, on parle de l'utilisation de la technique d’adaptative dans la régulateur PID pour les systèmes non linéaires. A la fin du chapitre, un résumé sur les systèmes flous est donné, ce dernier sera utile dans les prochains chapitres.
1.2.
Différentes structures de régulateur PID :
Différentes possibilités d’associations des modules P, I et D existent. Ces structures
sont fonctionnellement équivalentes, et il est facile de convertir les coefficients utilisés dans l’une pour obtenir ceux d’une autre [44]. Les trois configurations les plus utilisées sont : Le type série ( ) ( ) ( ) ∫ ( )𝑑 ( ) (1.1) Avec : ( ) ( ) ( )
La fonction de transfert s’écrit:
( )
( ) [
3
Figure 1.1: Régulateur PID de type série
Le type parallèle (t) (t) ∫ (t) t ( ) (1.3) v ( ) ( )
La fonction de transfert s’écrit:
( )
( ) (1.4)
Figure 1.2.Régulateur PID type parallèle
4 ( ) ( ) ∫ ( )𝑑 ( ) (1.5) v ( ) ( )
La fonction de transfert s’écrit:
( )
( ) ( + ) (1.6)
Figure 1.3. Régulateur PID type mixte.
1.3. Domaine d'application et limites du régulateur PID:
Dans le monde industriel, le régulateur PID est largement employé. Bien que relativement simple, cet algorithme soutient favorablement la comparaison avec des algorithmes plus sophistiqués, tant au point de vue de la performance que de la robustesse de la régulation vis-à-vis de non-linéarités ou variation du procédé. Par ailleurs, ce type d’algorithme est facile à implanter, ce qui plaidait en sa faveur à l’époque des régulateurs pneumatiques ou même électroniques. C’est moins vrai aujourd’hui où derrière chaque régulateur se cache un microprocesseur.
Une qualité du PID est qu’il est facile à comprendre donc facile à régler et à maintenir. Ces raisons expliquent pourquoi il est si largement employé, le plus souvent sous la forme PI, l’action D est souvent mise à zéro.
5
Il existe cependant des cas pour lesquels le régulateur PID n’est pas bien adapté. Nous avons vu que lorsque le procédé a un retard important, les performances sont mauvaises. C’est le cas aussi lorsque le système est oscillant [44].
1.4. Les avantages et les inconvénients du régulateur PID :
L'asservissement par PID est aujourd'hui l'un des asservissements les plus utilisés et
ce pour plusieurs raisons. Premièrement, il est très simple à mettre en place et s'avère efficace pour la plupart des systèmes réels. De plus, le calcul des coefficients laisse le choix entre plusieurs méthodes de difficulté croissante. D'une part, une méthode expérimentale très facile à mettre en place, permet d'obtenir rapidement des coefficients corrects pour des systèmes ne nécessitant pas de très grandes précisions dans l'asservissement. D'autre part, des méthodes mathématiques avancées offrent des techniques pour obtenir les coefficients idéaux pour un système en particulier Ainsi, la mise en place d'un asservissement PID peut-être à la fois rapide et efficace et permettra une optimisation des coefficients pour les systèmes les plus avancés.
1.5.Commande PID adaptative des systèmes non linéaires :
La structure de commande adaptative par un contrôleur PID permettant de résoudre les problèmes cités précédemment et garantir de bonnes performances et aussi elle permet de davantage les capacités de la commande PID aux cas des systèmes non linéaires incertains, trop perturbés et/ou à paramètres variables.
En général, selon les techniques d’adaptation utilisées dans les auteurs pour régler les gains, les commandes PID adaptatives peuvent être divisées en deux types :
Dans le premier type : les paramètres de la commande restent dans un ensemble
pré-choisi et ils sont changés par un certain superviseur. Parmi les superviseures les plus utilisés, on trouve la logique floue et le Gain Scheduling [45-48]. Le superviseur peut utiliser toutes les informations disponibles dans le système pour caractériser son comportement actuel afin qu’il sache comment changer les paramètres de la commande et finalement atteindre les spécifications souhaitées.
Dans le deuxième type : les auteurs utilisent une loi d’adaptation mathématique
6
type, l’analyse de la stabilité du système en boucle est nécessaire pour garantir la bournitude de ces paramètres.
1.6. Système floue :
1.6.1. Logique floueLa logique floue a été introduite en 1965 par L.A Zadeh. Elle a été appliquée en commande en 1974 par E.H. Mamdani lors de l’implémentation du premier contrôleur flou. La logique floue (Fuzzy Logic) est une technique de l’intelligence artificielle permettant la formalisation des imprécisions dues à une connaissance globale d'un système complexe. L’introduction en commande de nouvelles techniques telles que la logique floue, a suscité un intérêt sans cesse croissant depuis quelques décennies.
L’intérêt de la logique floue réside dans sa capacité à traiter l’imprécision et l’incertitude. Elle est issue de la capacité de l’homme à décider et agir d’une façon pertinente malgré la nature floue des connaissances disponibles [64].
1.6.2. Définition de la logique floue
On a deux définitions pour la logique floue :
la première est que la logique floue intervient dans la manipulation de connaissances insuffisantes et imprécises. Elle permet la représentation et le traitement de ces dernières, afin de pouvoir traiter des systèmes complexes
la seconde représente une extension de la logique classique, dans le but deraisonner sur des connaissances imparfaites [65].
1.6.3. Principe de logique floue
La logique floue offre un cadre formel, qui n’existait pas auparavant, pour mettre en œuvre de telles méthodes de façon rigoureuses. Cette section est consacrée à la présentation des bases fondamentales de la logique floue ainsi que leurs utilisations pour représenter le raisonnement approximatif basé sur les expressions linguistiques [65].
7
1.7. Fonction d’appartenance :
Dans la plupart des applications de la logique floue ،une fonction d’appartenance est associée avec des termes linguistiques qui apparaissent dans les antécédents ou les conséquents des règles. Ces fonctions sont choisies arbitrairement par l’utilisateur, la fonction d’appartenance liée à une valeur de la variable est notée μ et appelée « facteur d’appartenance ». Les formes des fonctions d’appartenance les plus utilisées sont :
Fonction triangulaire
En peut définir une fonction d’appartenance de type triangulaire avec trois paramètres {𝑎, b, c} :
(x)= ( ( ) ) (1.7)
Figure 1.4. Fonction triangulaire
Fonction trapézoïdale
8
(x)= ( ( ) ) (1.8)
Figure 1.5. Fonction d’appartenance trapézoïdale
Fonction Gaussienne
Elle est définie par une fonction d’appartenance avec deux paramètres
,
:µ(x)=exp(-( ) ) (1.9)
Figure 1.6 : Fonction d’appartenance Gaussienne
’ st la tr u gauss : c’est largeur
Fonction sigmoïdale
Une fonction sigmoïdale est définie par deux paramètres
9
( ) ( ( )) (1.10)
Figure 1.7. Fonction d’appartenance sigmoïdale
1.8. Les opérateurs flous :
La liaison entre les variables linguistiques s’effectue au niveau des inférences par des opérations floues :
Dénomination Opérateur Et Opérateur Ou
Relation entre : ( ) 𝑒 ( ) 𝑎 ( ) ( ( ) ( )) ( ) ( ( ) ( ))
Tableau 1.1. les opérateurs flous les plus utilisés
1.9. La structure de système flou:
Un système flou peut être interprété selon deux points de vue : mathématique ou logique. D’un point de vue mathématique, un système flou est une fonction non linéaire reliant un vecteur de données d’entrée à un vecteur de sortie et, de point de vue logique, un système flou est un système à base de connaissance particulière composé de quatre modules principaux, à savoir : la base de règles, la fuzzification, le moteur d’inférence et la défuzzification ( Figure 1.8) [66, 67, 68, 69, 70, 71] :
10
Figure 1.8. La structure de système flou 1.9.1. Fuzzification :
La fuzzification est la première étape dans la réalisation d’un système flou, elle
défini que transforme les valeurs d’entrée en un ensemble flou et représenter leur fonction d’appartenance, qui peuvent êtres traitées
1.9.2. Base de règles floues :
La base de l’expert est généralement exprimée par des règles de la forme «
SI-ALORS ». La base de règles est donc une collection de règles floues.
1.9.3. Défuzzificateur :
La dernière étape du contrôle, appelée défuzzification consiste à définir précisément
quelle doit être l’action sur le processus. En effet, le procédé ne peut pas interpréter des ordres du type « Petit » ou « Grand », etc.…. on doit lui envoyer une valeur physique. La méthode de défuzzification la plus utilisée est celle du centre de gravité qui est donnée par :
́=
∑ ́( )∑ ́( )
(1.11)
où F est le nombre des éléments dans Y (le domaine continu Y doit être discrétisée
11 1.9.4. Approximation floue
La classe des systèmes flous, utilisant la fuzzification par singleton, le produit d’inférence et la défuzzification par centre de gravité est la plus utilisée et peut être représentée par :
𝑓( ) ∑ ( ( ))
∑ ( ) (1.12)
où ( ) est le vecteur d’entrée, ̅ sont les centres des fonctions d’appartenance
des conséquences ( ) est la fonction d’appartenance l’entrée de la , et la
conjonction « ET » dans les prémisses, est réalisée par le produit. Le système flou peut être réécrit sous la forme suivante :
𝑓( ) ( ) (1.13)
où ( ̅ ̅ ) est un vecteur de paramètres et ( ) ( ) ( )) est un
vecteur régressif avec ( )comme régresser (appelé aussi fonction floue de base). Alors on définit les fonctions floues de base (FBF) comme :
( ) ( )
12
1.10. Conclusion :
Après avoir présenté les différentes classes de systèmes non linéaires ainsi que les différentes structures de commande PID classique, une grande partie de ce chapitre a été consacré à un état de l’art sur la commande PID des systèmes non linéaires.
En effet, on trouve dans la littérature plusieurs techniques qui ont été adoptées pour augmenter la commande PID pour faire face à la complexité des systèmes non linéaires la technique de linéarisation, la technique de robustification et la technique d’adaptation des gains. Des exemples pratiques et numériques ont été présentés pour illustrés ces techniques.
On a terminé le chapitre par un résumé sur la structure des systèmes flous et le théorème d’approximation universelle qui vont être exploités dans les chapitres suivants pour la conception de la commande PID adaptative.
13
2.1. Introduction :
Dans ce chapitre, nous allons étudier l’approche de commande PID floue adaptative pour une classes de systèmes SISO non linéaires développé dans [72] et puis l’appliquer à différents systèmes physiques à savoir, le pendule inversé et deux robots manipulateurs
2.2. Position du problème
Considérons une classe des systèmes non linéaires SISO incertains donnée par son modèle d'état suivant :
{
𝑥̇ 𝑥 𝑛
𝑥̇ (𝑥) (𝑥)
𝑦 𝑥 (2.1)
où x=[𝑥 𝑥 𝑥 est le vecteur d’état du système supposé disponible pour la
mesure, 𝑦 est la sortie du système, est l'entrée de commande, et (𝑥) et (𝑥) sont deux fonctions continues non linéaires inconnues.
Objectif : Notre objectif est de développer une loi de commande de type PID pour
forcer
la sortie 𝑦 à suivre une trajectoire désirée𝑦 , sous la contrainte que tous les signaux
impliqués dans la boucle de commande doivent être bornés.
Hypothèse 2.1 : Le signal de trajectoire désirée𝑦 , est borné et 𝑛-fois différentiable.
L'erreur de poursuite est définie par :
e(t) =𝑦 (t)-y(t) (2.2) et l'erreur de poursuite filtrée est définie par :
s(t)=( ) ( ) (2.3)
La solution de l'équation ( ) = 0 implique que l'erreur de poursuite (t) converge vers zéro avec une certaine constante de temps [73, 74-75]; par conséquent, l'objectif de la commande revient alors à forcer le signal ( ) à converger vers zéro lorsque le temps tends vers l’infini.
L'équation de la dynamique de 𝑠 peut s’écrire comme suit :
𝑠̇= 𝑣 – ( 𝑥) (𝑥) (2.4) où 𝑣 =𝑦 ( ) ( ) ̇ ( ) avec : ( ) ( ) ( ) 𝑛 1 (2.6)
14
Dans le cas où les deux fonctions 𝑥 et (𝑥) sont connues, la loi de commande idéale (2.7) peut atteindre l’objectif de commande.
(𝑥)( (𝑥) ( ) ) (2.7)
avec : 𝑘,𝑘 et sont des constantes positives.
En effet, en remplaçant la loi de commande idéale (2.7) dans (2.4), on obtient : 𝑠̇ 𝑘𝑠 𝑘 ( ) (2.8)
A partir de cette dernière équation, nous pouvons conclure que 𝑠 → lorsque → ∞,
cela implique que l’erreur de poursuite et tous ses dérivées convergent vers zéro
lorsque
→ ∞ [73, 74-75]. Cependant, puisque les deux fonctions non linéaires 𝑥 et 𝑥 sont supposées inconnues, alors, la commande idéale (2.7) ne peut pas être implémentée. Comme solution à ce problème, on propose dans ce chapitre d’approximer la loi de commande idéale (2.7) par une loi de commande PID adaptative. dans ce chapitre, deux approches de commande PID floue adaptative sont proposées pour la classe des systèmes (2.1) pour atteindre l’objectif de commande. Dans la première approche, le signal de commande ne subit aucune contrainte, alors que dans le second schéma, on suppose que le signal de commande est saturé en amplitude et en vitesse, et de plus on suppose que le signe du gain de commande est inconnu.
2.3. Première approche de commande PID floue adaptative :
Dans cette section, nous proposons une loi de commande PID floue adaptative pour le système non linéaire (2.1).
Hypothèse 2.2: La fonction (𝑥) est non nulle, bornée et de signe connu sans perte de
généralité, nous considérons ici que le signe de (𝑥) est positif, i.e. 0 < 0 ≤ (𝑥) < 1.
2.3.1. Conception de la première approche de commande PID floue adaptative :
La loi de commande idéale inconnue (2.7) est approcher ici par une loi de commande PID adaptative donnée par [76] :
u=𝑘 e(t)+𝑘 ∫ ( ) 𝜏+𝑘 ( ) (2.9)
où : 𝑘 est le gain proportionnel, 𝑘 est le gain d'intégration et 𝑘 est le gain de dérivation.
La loi de commande PID (2.9) peut être réécrite sous la forme matricielle suivante u= 𝑘 (2.10)
15
E= ( ) ∫ ( ) ( ) est le vecteur de l’erreur de poursuite.
Un système flou de type Takagi-Sugeno d'ordre zéro est utilisé pour estimer le vecteur
de gains 𝐾𝑃𝐼 . Les entrées du système flou sont l'erreur de poursuite 1 = ( ), l’intégrale
de l'erreur de poursuite =∫ ( )d et la dérivée de l'erreur de poursuite 3= ( )
. Les
sorties du système flou sont les gains de la commande 𝐾 . Pour chaque entrée (
=1,2,3) nous définissons 𝑚ensembles flous ,…,𝑚 . La base de règles floues
estconstruite par la collection de règles (𝑘 𝑁) de la forme :
: 𝑺𝑰 𝑠 et est et ALORS s 𝑘 𝑠 et 𝑘 est
En utilisant la méthode de produit algébrique pour l’implication et la méthode de la Moyenne pondérée pour la défuzzification, les sorties du système flou, à savoir les gains de la commande PID sont donnés par [76, 74] :
𝐾 =∑ ∑ (2.11) 𝑘 =∑∑ (2.12) 𝑘 ∑ ∑ (2.13) où : 3
1
1 ( ), ,.... i i i i k i G ek i Gk F FMi
avec Fji
. est la fonction d'appartenance de l'ensemble flouNotons parcP
cp1,....,cpN
T,cI
cI1,...cIN
TetcD
cD1,..cDN
T les vecteurs des paramètres ajustables (la partie conclusion du système flou), et w
w1,....wN
Tlevecteur des fonctions de base radiales où chaque élément 𝑤𝑘 est défini par :
∑ (2.14)
avec cette notation, les gainsK KP, I et K peuvent être réécrits comme suit : D
𝑘 𝑤 𝑘 𝑤 𝑘 =𝑤 (2.15)
et le vecteur des gains 𝐾𝑃𝐼𝐷 peut être réécrit comme suit :
𝐾 =𝑤 (2.16)
avec : = 𝑑 𝑎 [𝑤 𝑤 𝑤 ]et =
16
= 𝑤 (2.17)
En se basant sur le fait que le système flou définit par (2.16) est un approximateur universel [77], il est raisonnable de supposer que la commande PID floue adaptative
exprimée par (2.17) peut approximer la commande idéale inconnue donnée par (2.7),
avec une erreur d'approximation qu’on note par , et qui est considérée arbitrairement
petite
et limitée par une constante ̅(| | ≤ ̅ Par conséquent, la commande idéale inconnue
peut être écrite sous la forme suivante :
w (2.18)
où = est le vecteur des valeurs optimaux inconnue des éléments de .
Dans la section suivante nous proposons une loi d'adaptation pour la mise à jour des paramètres du vecteur qui permet de minimiser l’écart entre la commande PID floue adaptative et la commande idéale inconnue.
Loi d'adaptation : Dans cette section, nous proposons une nouvelle loi d’adaptation
pour
la mise à jour du vecteur des paramètres c afin de minimiser l'erreur entre et donnée
par [30, 28] :
(2.19) En remplaçant (2.17) et (2.18) dans (2.19), on obtient :
= 𝑤 ̃ (2.20)
où ̃ est le vecteur d’erreur d'estimation paramétrique.
L'approche utilisée pour générer la loi d'adaptation du vecteur est basée sur la
Minimisation de la fonction de coût quadratique de l'erreur suivante :
𝐽 = = g(x)( 𝑤 ) (2.21) Par application du gradient sur 𝐽, on obtient :
̇= 𝜂𝑤 (𝑥) (2.22) avec : 𝜂 une constante positive.
On remarque que le terme (𝑥) n'est pas disponible. Alors la loi d'adaptation (2.22)
ne peut pas être implémentée. Pour surmonter ce problème, on utilise l’équation de la dynamique de surface de glissement (2.4).
En additionnant et soustrayant le terme (𝑥) au second terme de (2.4), on obtient :
𝑠̇= 𝑣 – ( 𝑥) (𝑥) + (𝑥) (𝑥) (2.23) En utilisant (2.7) et (2.19), (2.23) devient
17
𝑠̇ =-ks-𝑘 ( ) (𝑥) (2.24)
A partir de (2.24), le terme (𝑥) peut être exprimé en fonction des termes connus
comme suit :
(𝑥) 𝑠 𝑘𝑠 𝑘̇ ( ) (2.25) Par conséquent, la loi d’adaptation (2.22) devient :
̇ = (𝑠̇ 𝑘𝑠 𝑘 ( ) (2.26)
Afin de garantir la bornitude des valeurs des éléments du vecteur des paramètres en
présence de l’erreur d'approximation et pour améliorer les performances de
robustesse, nous allons modifier la loi d’adaptation (2.22) par l’introduction d’un terme
en fonction de l’erreur appelé -modification comme suit [76]:
̇ = ( (𝑥) ) | (𝑥) | (2.27)
avec : (𝑥) =𝑠̇+ks+𝑘 tanh( )
Remarque 2.1 : le terme -modification (𝜂 | (𝑥) |) est utilisé pour rendre le
contrôleur plus robuste. Il est clair que lorsque les paramètres deviennent dans un certain intervalle acceptable, ce terme n'a pas besoin d'être actif (il tend vers zéro quand
tend vers zéro).
2.3.2. Analyse de la stabilité :
Théorème 2.1: Considérons le système (2.1) et supposons que les hypothèses 2.1 et 2.2
Sont satisfaites, alors la loi de commande PID floue définie par (2.17) avec la loi
d'adaptation (2.27) garantit que ̃∈ 𝐿 et est de l’ordre de ̃ au sens de la
moyenne quadratique.
Preuve du théorème 2.1:
Nous définissons la fonction de Lyapunov candidate suivante :
= ̃ ̃ (2.28) Par dérivation, on obtient :
̇ ̃ ̇ (2.29) En remplaçant (2.27) dans (2.29), on trouve :
̇ ̃ ( (𝑥) | (𝑥) |) (2.30)
On déduit la valeur du terme ̃ (𝑥) de (2.20) puis on la remplace dans (2.30), il
vient :
18
En utilisant l'inégalité :
̃ c≤ - ‖ ̃‖ ‖ ‖ (2.32) L’équation (2.31) devient :
̇ ≤-( ) (𝑥) ‖ ̃‖ | (𝑥) | ‖ ‖ | (𝑥) | (2.33)
Puisque est bornée par et (x) est supposée positive, alors :
̇ ≤ (| | ̃ ‖ ‖ ) (𝑥)| | (2.34)
Il est clair de (2.34) que si ‖ ̃‖ ‖ ‖ ̅ C’est-à-dire, ≜ ( ‖ ‖ + ̅),
alors ̇≤ , ce qui implique la bornitute de et de tous les éléments du vecteur de l’erreur paramétrique ̃( ̃𝐿 ).
Examinons maintenant la convergence de l’erreur .
L'inégalité (2.33) peut s'écrire comme suit :
̇ ≤ (𝑥) + (𝑥) ‖ ̃‖ | (𝑥) | ‖ ‖ | (𝑥) | (2.35)
En utilisant les inégalités évidentes suivantes :
- ‖ ‖ | | ≤ ‖ ‖ (2.36) (𝑥) ≤ (𝑥) (𝑥) (2.37) L’équation (2.35) devient :
̇ ≤ (𝑥) ‖ ̃‖ | (𝑥) | (𝑥)‖ ‖ (𝑥) (2.38)
D’après l'hypothèse 2.2, on peut réécrire (2.38) comme suit :
̇ ≤ (2.39)
avec :
( (𝑥)‖ ‖ (𝑥) (2.40)
Puisque 𝐿 et ≤ ̃ , alors l’intégration de = 0 à = + 𝑇 des deux membres de
(2.39) et en réarrangement de ses termes donne:
∫ 𝑑 ≤ 𝑇 ( ( ) ( 𝑇)) (2.41) qui peut être encore bornée comme suit :
∫ 𝑑 ≤ 𝑚 ( ̅ )T+𝑚 (2.42) avec :
19
𝑚 𝑠 ( ( ) ( 𝑇)) (2.44)
De l'expression (2.42) on constate donc que ∈ ( + ̅ )
Théorème 2.2: Considérons le système (2.1) et supposons que les hypothèses 2.1 et
sont satisfaites, alors la loi de commande proposée (2.17) avec sa loi d'adaptation des paramètres (2.27) garantit que l’erreur de poursuite converge exponentiellement vers
unerégion ajustable.
Preuve du théorème 2.2:
Considérons la fonction de Lyapunov candidate suivante:
V= 𝑠 ̃ ̃ 𝑠 (2.45) Sa dérivée est donc :
̇ =𝑠𝑠̇ ̇ (2.46)
Par substitution de (2.24) dans (2.44), on obtient :
̇ = 𝑘𝑠 ( ) 𝑠 (𝑥) ̇ (2.47) En utilisant l'inégalité évidente suivante :
(𝑥) 𝑠 ≤ (𝑥) (𝑥)𝑠 (2.48) L’équation (2.45) devient :
(𝑘 (𝑥))𝑠̇ 𝑘 𝑠 𝑎𝑛 ( ) (𝑥) ̇ (2.49)
En utilisant (2.38) et l’hypothèse 2.2, il vient :
̇ ≤ (𝑘 ≤ )𝑠 𝑘 𝑠 𝑎𝑛 ( ) ‖ ̃‖ | (𝑥) | (𝑥)‖ ‖ (𝑥)
(2.50)
Si on choisit 𝑘 > et 𝛾 = 2𝑚 𝑛(𝑘 ), ̇ peut être bornée comme suit :
̇ ≤ (2.51)
A partir de cette dernière inégalité, si 𝑠 , c'est-à-dire,
et puisque est borné, alors ̇ ≤ pour . Alors selon le
théorème de Lyapunov [78], les signaux et 𝑠 sont bornés.
En intégrant maintenant (2.49) de à + 𝑇 et en réarrangeant ses termes, on obtient : ∫ 𝑠 𝑑 ≤ 𝑇 ( ( ) ( 𝑇)) (2.52)
Puisque V𝐿 il est évident, à partir de (2.50), que l'erreur de poursuite filtrée 𝑠 converge
20
exponentiellement à un ensemble défini par ={𝑠||𝑠| ≤√ }. En effet, il existe 𝑇
tel que pour 𝑇:|𝑠( )| ≤ √ ce qui implique que | ( )( )| ≤ √ ,j=0,…,
n-1, donc l'erreur de poursuite et toutes ses dérivées sont convergent vers une région ajustable.
Remarque 2.2: La loi de commande utilisée ici est uniquement de type PID, sans ajout
de terme de robustesse. Cependant, le terme de la loi d’adaptation 𝑘 ( ) joue
d'une certaine manière, le rôle du terme de robustesse. Par conséquent, l’augmentation
de la valeur du gain 𝑘 peut améliorer la robustesse de cette commande.
2.3.3. Résultats de simulation :
Exmple1 : pendule inversé
La dynamique du pendule est donnée par son modèle d’état suivant :
{ 𝑥̇ 𝑥 𝑥̇ (𝑥) (𝑥) 𝑦 𝑥 (2.53) avec : (𝑥) ( ) ( ( ) ( )) ( ( ) ( )) (2.54) (𝑥) ( ) ( ) ( ( ) ( )) (2.55)
avec 𝑥 est la position angulaire du pendule et 𝑥 sa vitesse angulaire. Les valeurs des
paramètres du système sont: = 9.8 𝑚/𝑠2 , 𝑚 = 1kg, 𝑚 = 0.1𝑘 , 𝑙 = 0.5𝑚.
L’objectif est de forcer le signal de sortie du système 𝑦 à suivre la trajectoire désirée
𝑦 ( ), avec les conditions initiales suivantes: 𝑥 ( ) , 𝑥 ( ) . Les
valeurs des paramètres de la commande sont choisies comme suit : 𝑘 = 10, 𝑘 = 5,
n=50 , = 0.01, p = 5. Les gains de la commande PID sont estimés en ligne par un
système flou adaptative à trois entrées ; l'erreur de poursuite ( )l’intégrale de
l'erreur de poursuite ∫ (𝜏)𝑑𝜏 et la dérive de l'erreur de poursuite ( )
A chaque entrée ( ) trois fonctions d'appartenances sont définies comme
21
Figure2.1. Fonctions d'appartenance des systèmes flous pour l’entrée ( )
Figure 2.2. Fonctions d'appartenance des systèmes flous pour l’entrée ∫ ( )
-2 -1 0 1 2 0 0.2 0.4 0.6 0.8 1 1.2 E1 N Z P -0.50 0 0.5 0.2 0.4 0.6 0.8 1 1.2 E 2 Z P N
22
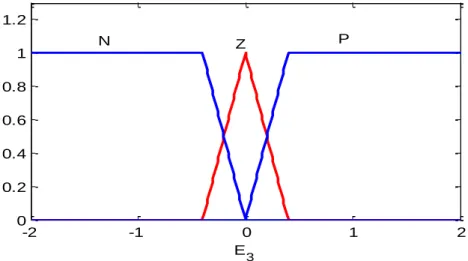
Figure.2.3. Fonctions d'appartenance des systèmes flous pour l’entrée ( )
Figure 2.4. Position angulaire𝑦 𝑥 , trajectoire désirée 𝑦
-2 -1 0 1 2 0 0.2 0.4 0.6 0.8 1 1.2 E3 N Z P 0 2 4 6 8 10 12 14 16 18 20 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 Temps [s] y yd
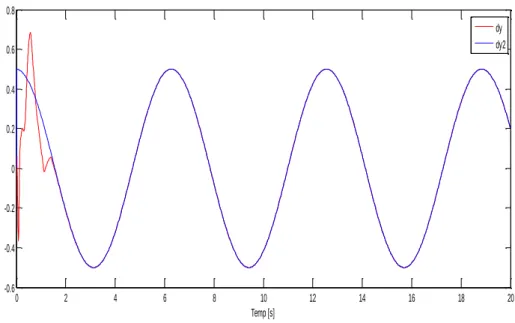
23 0 2 4 6 8 10 12 14 16 18 20 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 Temp [s] dy dy2
Figure 2.5. Vitesse angulaire 𝑦̇ 𝑥 , dérivée de la trajectoire désirée 𝑦̇
.
Figure 2.6. Evolution des paramètres de la commande PID
0 2 4 6 8 10 12 14 16 18 20 -8 -6 -4 -2 0 2 4 6 8 Temp [s] u
24 Exemple 2 :Robot manipulateur 1
On considère un robot manipulateur à un degré de liberté dont le modèle dynamique est donné par [79] :
̈ ̇ ( ( ̇ ))𝑠 𝑛 ( )̇ ( ̇) (2.56)
Où u est le couple de commande appliqué à l’articulation, la sortie sont la position articulaire q . Dans cette simulation, les valeurs suivantes sont utilisées :
( ̇)=0.5sin (3q). (2.57)
Avec :𝑀 𝑘 𝑚 𝑁𝑚 𝑁𝑚 𝑁𝑚 𝑠 𝑎𝑑
La trajectoire de référence est donnée par
( ) ( ) ( ) et les paramètres de synthèse sont choisis comme
suit : 𝑘 𝑘 𝑛 . Les conditions initiales
choisies sont : ( ) ̇( )
Figure 2.7.Réponses du système (trait continu), trajectoires de référence (trait discontinu). 0 2 4 6 8 10 12 14 16 18 20 -1.5 -1 -0.5 0 0.5 1 1.5 Temps [s] q qd
25 0 2 4 6 8 10 12 14 16 18 20 -1.5 -1 -0.5 0 0.5 1 1.5 Temps [s] dy/dt dyd/dt
Figure. 2.8. Dérivée de la sortie du systéme 𝑥 (trait continu), dérivée de la trajectoire
de référence 𝑦̇ (trait discontinu).
Les résultats de simulation de position et de vitesse sont donnés figure (2.7) Le signal de commande est montré figure (2.9) On remarque que les trajectoires réelles convergent vers les trajectoires désirées malgré la présence des incertitudes et des perturbations externes.
26 0 2 4 6 8 10 12 14 16 18 20 -12 -10 -8 -6 -4 -2 0 2 4 6 8 Temps [s]
Figure .2.9. Signal de commande u (t )
Exmple3 :Robot manipulateur 2
On considère un bras manipulateur à un degré de liberté dont le modèle dynamique par [80] :
̈ ̇ ̇ ( ) ( ) 𝑁( ) (2.58)
La trajectoire de référence est donnée par ( ) ( ) et les paramètres de synthèse
sont choisis comme suit : 𝑛 , 𝑘 et k =100 . Les conditions
initiales choisies sont : ( ) ̇( )
Figure. 2.10 .Réponses du système (trait continu), trajectoires de référence (trait discontinu).
0
2
4
6
8
10
12
14
16
18
20
-2
-1
0
1
2
Temps [s]
q
qd
27
Figure 2.11.Dérivée de la sortie du système 𝑥 (trait continu), dérivée de la trajectoire
de référence 𝑦̇ (trait discontinu).
.
Figure.2.12. Signal de commande u (t)
Les résultats de simulation de position et de vitesse sont donnés figure (2.10) Le signal de commande est montré figure (2.12) On remarque que les trajectoires réelles convergent vers les trajectoires désirées malgré la présence des incertitudes et la non-linéarité à l’entrée. 0 2 4 6 8 10 12 14 16 18 20 -50 -40 -30 -20 -10 0 10 Temps [s] 0 2 4 6 8 10 12 14 16 18 20 -1.5 -1 -0.5 0 0.5 1 1.5 2 Temps [s] dy/dt dyd/dt
28
2.4. Conclusion
Dans ce chapitre, le schéma de commande PID floue adaptative [72] pour une classe de systèmes non linéaires incertains a été étudiée. Dans ce schémas, un système flou est utilisé afin d’estimer en ligne les gains optimaux de la loi de commande PID. La mise à jour des paramètres du système flou est effectuée par le biais d’une loi d'adaptation de type gradient permettant de minimiser l'erreur entre la commande PID et la commande idéale inconnue et préserver ainsi les performances désirées garantit par cette dernière. Afin de compenser l’erreur d'approximation floue et rendre le contrôleur plus robuste un terme de type - modification est adopté dans la loi d’adaptation.
La loi de commande PID floue adaptative considérée assure la bornitude de tous les signaux de la boucle fermée, et la convergence de l'erreur de poursuite vers une région ajustable dans le premier schéma et vers zéro dans le second schéma.
La loi de commande PID floue adaptative considérée a été validée sur le pendule inversé et deux robots manipulateurs.
29
Les travaux de notre mémoire contribuent à l’extension de la commande PID pour prendre en charge des classes systèmes non linéaires inconnus. Les schémas de commande Proposés utilisent des lois de commande PID adaptative et combinent ainsi les avantages de la commande classique et la commande adaptative à savoir la structure simple et les
qualités de la robustesse et la stabilité de haut niveau, Cette loi de commande est la somme de deux termes, un terme adaptatif basé sur les systèmes flous et l’autre terme, dit de robustesse. Les lois d’adaptation sont tirées de l’étude de la stabilité par l’approche du Lyapunov. Après avoir présenté les systèmes flous, dans le premier chapitre avec les concepts de base, l’architecture d’un système flou, et le système flou de Tackagi-Sugeno avec la notion
d’approximation universelle qui possèdent ces systèmes.
Dans le deuxième chapitre, nous avons proposé et développé des schémas de Commande adaptative direct et indirect pour une classe de systèmes non linéaires monovariables en utilisant les systèmes flous. Dans le schéma indirect, deux approches
de commande sons proposées la première approche indirecte évite le problème de singularité de la loi de commande par l’utilisation d’un algorithme de projection. Ce dernier permet de forcer les paramètres estimés à rester dans une région prédéfinie par l’utilisateur. Cependant, en pratique, la détermination de telle région n’est pas une tâche facile, car, les valeurs désirées des paramètres ajustés sont inconnues. Pour pallier à ce problème et réduire le nombre de paramètres de conception, une seconde approche est proposée, le problème de la singularité de la loi de commande est résolu par une approximation de l’inverse du gain de commande estimé. Le second schéma de commande proposé concerne la commande adaptative directe floue. Dans ce schéma, le but était l’approximation d’une loi de inconnue et le problème de division par zéro ne se pose pas.
30
[1] J. J. E. Slotine et W. Li, Applied Nonlinear Control, USA: Prentice-Hall, Englewoods Cliffs, New-Jersey, 1991.
[2] H. Khalil, Nonlinear Systems, 2nd edn, Prentice-Hall ,EnglewoodCliffs, 1996.
[3] J. Seo et R. Venugopal, «Feedback linearization based control of a rotational hydraulic drive,» Control Engineering Practice, vol. 15, n. 112, pp. 1495-1507, 2007.
[4] M. Feki, «An adaptive feedback control of linearizable chaotic systems,» Chaos, Solitons &, vol. 15, n. 105, pp. 883-890, 2003.
[5] C. Hua, X. Guan et P. Shi, «Adaptive feedback control for a class of chaotic systems,» Chaos, Solitons & Fractals, vol. 23, n. 13, pp. 757-765, 2005.
[6] J. Wan, «Nonlinear Control of Electronic Throttle Based on Backstepping Approach,» American Journal of Electromagnetics and Applications, vol. 6, n. 11, pp. 1-7, 2016.
[7] V. Utkin, «Variable structure systems with sliding modes,» IEEE Transactions on Automatic Control, vol. 22, n. 12, pp. 212-222, 1977.
[8] V. Utkin et H. Lee, «chattering problem in sliding mode control systems,» chez International Workshop on Variable Structure Systems IFAC, Sardinia, Italy, 2006.
[9] N. Poursafar, H. Taghirad et M. Haeri, «Model predictive control of non-linear discrete time systems: a linear matrix inequality approach,» IET Control Theory and Applications, vol. 4, pp. 1922-1932, 2010.
[10] V. Ghaffari, A. Safavi et S. Naghavi, «Robust model predictive control of a class of uncertain nonlinear systems with application to typical CSTR problems,» Journal of Process Control, vol. 23, pp. 493-499, 2013.
[11] S. Akhtar et D. Bernstein, «Lyapunov-stable discrete-time model reference adaptive control,» International Journal of Adaptive Control and Signal Processing, vol. 19, p. 745– 767, 2005.
[12] Y.C. Chang, “Adaptive fuzzy-based tracking control for nonlinear SISO systems via VSS and H∞ approaches,” IEEE Trans. Fuzzy Systems, vol. 9, pp. 278–292, 2001.
[13] A. Boulkroune, «Commande floue adaptative avec et sans observateur des systemes non lineaires incertains,» thèse de doctorat ENP, Alger, 2009.34
[14] C. H. Wang, H.-L. Liu et T.-C. Lin, «Direct Adaptive Fuzzy-Neural Control With State Observer and Supervisory Controller for Unknown Nonlinear Dynamical Systems,» IEEE Trans. Fuzzy Syst, vol. 10, n. 11, pp. 39-49, 2002.
[15] J. Spooner et K. Passino, «Stable adaptive control using fuzzy systems and neural networks,» EEE Trans. Fuzzy Syst, vol. 4, n. 13, pp. 339-359, 1996.
31
[16] V. Gazi et K. Passino, «Direct adaptive control using dynamic structure fuzzy systems,» chez Proceedings of the 2000 American Control Conference, USA, 2000.
[17] C. Chang, «Adaptive fuzzy-based tracking control for nonlinear SISO systems via VSS and H¥ approaches,» IEEE Trans. Fuzzy Syst, vol. 9, pp. 278-292, 2001.
[18] K. Åström et T. Hägglund, PID controllers. Research Triangle Park, America: N.C.: Instrument Society of America, 1995.
[19] W. ZHANG et Y. XI, «Design PID controllers for desired time-domain or frequency-domain response,» ISA Transactions, vol. 41, n. 14, pp. 511-520, 2002.
[20] D. Lu, L. Zhu et X. Li, «PID Parameter Optimization of Shunting and Winch Control System in Coal Transportation Based Online Adaptive Genetic Algorithm,» chez International Conference on E-Product E-Service and E-Entertainment, China, 2010.
[21] S. Srikanth et G. Chandra, «Modeling and pid control of the brushless dc motor with the help of genetic algorithm,» chez International Conference on Advances in Engineering, Science and Management (ICAESM), India, 2012.
[22] T. Andromeda, A. Yahya, N. Khamis, A. Baharom et M. M, «PID controller,» chez 2012 4th International Conference on Intelligent and Advanced Systems (ICIAS2012), Malaysia, 2012.
[23] J. Chiou, S. Tsai et M. Liu, «A PSO-based adaptive fuzzy PID-controllers,» Simulation Modelling Practice and Theory, vol. 26, pp. 49-59, 2012.
[24] O. ERCIN et R. COBAN, «Comparison of the Artificial Bee Colony and the Bees Algorithm for PID Controller Tuning,» chez Innovations in Intelligent Systems and Applications (INISTA), 2011 International Symposium on, Turkey, 2011.
[25] X. M. MA, «Application of ant colony algorithm in PID parameter optimization for mining hoist direct torque control system,» chez International Conference on Advanced Computer Control (ICACC), Singapore, 2009.
[26] W. D. Chang, R.-C. Hwang et J.-G. Hsieh, «A self-tuning PID control for a class of nonlinear systems based on the lyapunov approach,» Journal of Process Control, vol. 12, n. 12, pp. 233- 242, 2002. 35
[27] W. D. Chang et J.-J. Yan, «Adaptive robust PID controller design based on a sliding mode for uncertain chaotic systems,» Chaos, Solitons & Fractals, vol. 26, n. 11, pp. 167-175, 2005.
[28] I. Mizumoto, T. Hirahata, S. Ohdaira et Z. Iwai, «Adaptive PID controller design based on output feedback passivity for discrete-time nonlinear systems,» chez American Control
32
Conference (ACC'09), USA, 2009.
[29] I. Mizumoto, D. Ikeda, H. Tadashi et Z. Iwai, «Design of discrete time adaptive PID control systems with parallel feedforward compensator,» Control Engineering Practice, vol. 18, n. 12, pp. 168-176, 2010.
[30] J. Chen et C. Yang, «Stable Adaptive Fuzzy PID Controller for Nonlinear Uncertain Systems,» International Journal of Digital Content Technology and its Applications, vol. 7, n. 15, pp. 374-382, 2013.
[31] W. S. Yu, «Adaptive fuzzy PID control for nonlinear systems with Hinf tracking performance,» chez International Conference on Fuzzy Systems, Canada , 2006.
[32] D. L. Yu et T. K. Chang, «A stable self-learning PID control for multivariable time varying systems,» Control Engineering Practice, vol. 15, n. 112, pp. 1577-1587, 2007.
[33] S. M. Guo, J. S. Tsai, Y. C. Lin, T. J. Tsai et C. W. Chen, «Intelligent-based PID fault tolerant tracking control for unknown nonlinear MIMO systems,» chez International Conference on Control and Automation, New Zealand, 2009.
[34] S. Slama, E. Ayachi et M. Benrejeb, «Adaptive PID controller based on neural networks for MIMO nonlinear systems,» Journal of Theoretical and Applied Information Technology, vol. 97, n. 102, pp. 361-371, 2019.
[35] W. D. Changa, R.-C. Hwangb et J.-G. Hsiehc, «A multivariable on-line adaptive PID controller using auto-tuning neurons,» Engineering Applications of Artificial Intelligence, vol. 16, n. 11, pp. 57-63, 2003.
[36] T. A. Al Zohairy et K. S. Salem, «Adaptive control for MIMO nonlinear systems based on PID neural networks,» International Journal Of Engineering And Computer Science, vol. 5, n. 18, pp. 17673-17678, 2016.
[37] T. Chamsai, P. Jirawattana et T. Radpukdee, «Robust adaptive PID controller for a class of uncertain nonlinear systems: an application for speed tracking control of an SI engine,» Mathematical Problems in Engineering, vol. 2015, pp. 1-12, 2015.
[38] M. S. Jamalzade, H. R. Koofigar et M. Ataei, «Adaptive fuzzy control for a class of constrained nonlinear systems with application to a surface vessel,» Journal of Theoretical and Applied Mechanics, vol. 54, n. 13, pp. 987-1000, 2016. 36
[39] D. Shen, W. Sun et Z. Sun, «Adaptive PID formation control of nonholonomic robots without leader's velocity information,» ISA Transactions, vol. 53, n. 12, pp. 474-480, 2014.
33
[40] A. Boubakir, S. Labiod et F. Boudjema, «A stable self-tuning proportional-integralderivative controller for a class of multi-input multi-output nonlinear systems,» Journal of Vibration and Control, vol. 18, n. 12, pp. 228-239, 2011.
[41] W.-D. Chang, R.-C. Hwang et J.-G. Hsieh : A self-tuning PID control for a class
of nonlinear systems based on the lyapunov approach. Journal of Process Control, 12(2):233{242, 2002.
[42] W.-D. Chang et J.-J. Yan : Adaptive robust PID controller design based on a sliding mode for uncertain chaotic systems. Chaos, Solitons & Fractals, 26(1):167{175, 2005.
[43] I. Mizumoto, D. Ikeda, T. Hirahata et Z. Iwai : Design of discrete time adaptive PID control systems with parallel feedforward compensator. Control Engineering Practice, 18(2):168{176, 2010.
[44] Alina BESANCON-VODA & Sylviane GENTIL, Régulateur PID analogiques et numériques. Edition Technique d’ingénieur 2012.
[45] M. Knoop et J. Moreno Pérez, «Nonlinear PI-controller design for a continuous-flow furnace via continuous gain scheduling,» Journal of Process Control, vol. 4, n. 13, pp. 143-147, 1994.
[46] E. Yesil, M. Guzelkaya et I. Eksin, «Internal model control based fuzzy gain scheduling technique of pid controllers,» chez Proceedings World Automation Congress , Spain, 2004. [47] K. Babulu et D. K. Kumar, «Fuzzy self-adaptive PID controller design for electric heating 106 furnace,» International Journal of Engineering Inventions, vol. 1, n. 15, pp. 10-21, 2012.
[48] J. Lai, H. Zhou et W. Hu, «A New Adaptive Fuzzy PID Control Method and Its Applicance in FCBTM,» International Journal of Computers Communications & Control, vol. 11, n. 13, p. 394, 20016.
[49] W. D. Chang, R.-C. Hwang et J.-G. Hsieh, «A self-tuning PID control for a class of nonlinear systems based on the lyapunov approach,» Journal of Process Control, vol. 12, n. 12, pp. 233-242, 2002.
[50] W. D. Chang et J.-J. Yan, «Adaptive robust PID controller design based on a sliding mode for uncertain chaotic systems,» Chaos, Solitons & Fractals, vol. 26, n. 11, pp. 167-175, 2005.
34
[51] I. Mizumoto, T. Hirahata, S. Ohdaira et Z. Iwai, «Adaptive PID controller design based on output feedback passivity for discrete-time nonlinear systems,» chez American Control
Conference (ACC'09), USA, 2009.
[52] I. Mizumoto, D. Ikeda, H. Tadashi et Z. Iwai, «Design of discrete time adaptive PID control systems with parallel feedforward compensator,» Control Engineering Practice, vol. 18, n. 12, pp. 168-176, 2010.
[53] J. Chen et C. Yang, «Stable Adaptive Fuzzy PID Controller for Nonlinear Uncertain Systems,» International Journal of Digital Content Technology and its Applications, vol. 7, n. 15, pp. 374-382, 2013.
[54] W. S. Yu, «Adaptive fuzzy PID control for nonlinear systems with Hinf tracking performance,» chez International Conference on Fuzzy Systems, Canada , 2006.
[55] D. L. Yu et T. K. Chang, «A stable self-learning PID control for multivariable time varying systems,» Control Engineering Practice, vol. 15, n. 112, pp. 1577-1587, 2007.
[56] S. M. Guo, J. S. Tsai, Y. C. Lin, T. J. Tsai et C. W. Chen, «Intelligent-based PID fault tolerant tracking control for unknown nonlinear MIMO systems,» chez International Conference on Control and Automation, New Zealand, 2009.
[57] S. Slama, E. Ayachi et M. Benrejeb, «Adaptive PID controller based on neural networks for MIMO nonlinear systems,» Journal of Theoretical and Applied Information Technology, vol. 97, n. 102, pp. 361-371, 2019.
[58] W. D. Changa, R.-C. Hwangb et J.-G. Hsiehc, «A multivariable on-line adaptive PID controller using auto-tuning neurons,» Engineering Applications of Artificial Intelligence, vol. 16, n. 11, pp. 57-63, 2003.
[59] T. A. Al Zohairy et K. S. Salem, «Adaptive control for MIMO non linear systems based on PID neural networks,» International Journal Of Engineering And Computer Science, vol. 5, n. 18, pp. 17673-17678, 2016.107
[60] T. Chamsai, P. Jirawattana et T. Radpukdee, «Robust adaptive PID controller for a class of uncertain nonlinear systems: an application for speed tracking control of an SI engine,»
Mathematical Problems in Engineering, vol. 2015, pp. 1-12, 2015.
[61] M. S. Jamalzade, H. R. Koofigar et M. Ataei, «Adaptive fuzzy control for a class of constrained nonlinear systems with application to a surface vessel,» Journal of Theoretical and Applied Mechanics, vol. 54, n. 13, pp. 987-1000, 2016.
[62] D. Shen, W. Sun et Z. Sun, «Adaptive PID formation control of non holonomic robots without leader's velocity information,» ISA Transactions, vol. 53, n. 12, pp. 474-480, 2014.
35
[63] A. Boubakir, S. Labiod et F. Boudjema, «A stable self-tuning proportional-integralderivative controller for a class of multi-input multi-output nonlinear systems,» Journal of Vibration and Control, vol. 18, n. 12, pp. 228-239, 2011.
[64] R. Boukezzoula, "Commande floue d’une classe des systèmes non linéaires : application au problème de suivi de trajectoire", l’université de Savoie, 31 Mars 2000.
[65] R. A. Freeman and P.V. Kokotovic, " A New Lyapunov Function for the Backstepping Design of ’Softer’ Robust Nonlinear Control Laws", Technical report no. CCEC-92-0520, 1992.
[66] H. Buhler, Le réglage par logique floue. Presses Polytechniques Rommandes, 19 [67] L.X. Wang, Adaptive Fuzzy Systems and Control: Design and Stability Analysis. Prentice-Hall, Englewood Clifs, NJ, 1994.94.
[68] J.S.R. Jang and C.T. Sun, “Neuro-Fuzzy modeling and control,” Proc. IEEE, vol. 83, no. 3, pp. 378-406, Mar. 1995.
[69] J. M. Mendel, “Fuzzy systems for engineering: A tutorial,” Proc. IEEE, vol. 83, no. 3, pp. 347-377, Mar. 1995.
[70] M.M. Heniche, Sur l’utilisation des réseaux de neurones artificiels et des systèmes flous pour la linéarisation et la commande de processus chimiques non linéaires, Thèse de Magister, ENP, 1997.
[71] S. Labiod, Commande adapataive par systèmes flous: application aux robots manipulateurs, Thèse de Magister, ENP, 1998.
[72] N. Cherrat, «Contribution à la commande PID floue adaoptative des systèmes non linéaires» Thèse de doctorat, Université de Jijel, 2019.
[73] Y.C. Chang, “Adaptive fuzzy-based tracking control for nonlinear SISO systems via VSS and H∞ approaches,” IEEE Trans. Fuzzy Systems, vol. 9, pp. 278–292, 2001
[74] N. Cherrat et H. Boubertakh, «An adaptive fuzzy PI control for a class of unknown nonaffine systems,» chez 3rd International Conference on Control, Engineering & Information Technology CEIT’2015, Algeria, 2015.
[75] S. Labiod et T. M. Guerra, « Fuzzy adaptive control for a class of nonlinear systems with unknown control gain,» Evolving Systems, vol. 3, n. 11, pp. 57-64, 2012.
36
[76] N. Cherrat et H. Boubertakh, «An adaptive fuzzy PID control for a class of SISO uncertain nonlinear systems,» chez The 5th International Conference on Electrical Engineering – Boumerdes (ICEE-B), Alger, 2017.
[77] L. X. Wang et J. M. Mendel, «Fuzzy Basis Functions, Universal Approximation and Orthogonal Least-Squares Learning,» IEEE transactions on Neural Networks, vol. 3, n. 15, pp.807-814, 1992.
[78] P. Ioannou et J. Sun, Robust adaptive control, Englewood Cliffs: Prentice Hall, 1996. [79] G. Liu, “Decomposition-based friction compensation of mechanical systems”, Mechatronics, vol. 12, pp. 755–769, 2002.
[80] R. Selmic and F. L. Lewis, “Backlash compensation in nonlinear systems using dynamic inversion by neural networks”, Asian Journal of Control, Vol. 2, no. 2, pp. 76-87, 2000.